犁旋組合式油菜直播機扣垡裝置設計與試驗
2020-06-29 01:17:10魏國粱張青松劉立超肖文立孫文成廖慶喜
農業機械學報 2020年6期
關鍵詞:作業
魏國粱 張青松 劉立超 肖文立 孫文成 廖慶喜
(1.華中農業大學工學院, 武漢 430070; 2.農業農村部長江中下游農業裝備重點實驗室, 武漢 430070)
0 引言
油菜是重要的油料作物,我國油菜種植區域可分為冬油菜和春油菜兩大產區[1],其中冬油菜占總種植面積90%以上。長江中下游地區是我國冬油菜的主產區,該區域種植模式以稻-油水旱輪作為主[2]。
長期以來,油菜播種受前茬水稻收獲后留茬高、秸稈量大等影響,傳統旋耕易出現作業耕深淺、秸稈埋覆率低等問題,油菜直播種床耕整作業難度大[3]。在實際生產中,長江中下游稻油輪作區多采用先鏵式犁深翻、后旋耕的耕整方式,能解決傳統旋耕機耕深淺等問題,但其工序復雜,不利于搶農時,且對土壤產生二次碾壓[4-5]。
針對傳統耕整方式的不足,秦寬等[6]設計了犁翻旋耕復試作業耕整機,研究了作業過程中犁耕與旋耕的交互作用;劉曉鵬等[7]為解決油菜種植時因秸稈量大而導致機具易纏草、堵塞的問題,設計了驅動圓盤犁對置組合式耕整機,一次作業能完成種床耕整;王金武等[8]為解決水稻秸稈還田機傳統旋耕部件耕深較淺、秸稈還田深度不足等問題,研制了水稻秸稈整稈深埋還田裝置,作業效果良好;MATIN等[9]研究了帶狀旋耕中3種不同刀片在不同作業參數下的扭矩變化規律;WEISE[10]研究了聯合耕整機作業功耗與前進速度的關系。國內外學者在復式耕整機[11-15]和旋耕優化研究[16-19]上取得了較多成果,但對扣垡作業研究較少。本文針對長江中下游稻油輪作區油菜直播作業時,因前茬水稻留茬高、秸稈量大而導致旋耕部件作業耕深淺、埋茬率低的問題,設計一種與油菜直播機配合,通過先抬、后扣的作業方式,實現高茬粘重土壤有序翻埋的扣垡裝置,并集成犁旋組合式油菜直播機,以期一次作業可完成秸稈翻埋、碎土平整、開畦溝、施肥、播種等作業工序。
1 總體結構與工作過程
1.1 總體結構
犁旋組合式油菜直播機主要由扣垡裝置、旋耕裝置、開畦溝裝置、排種裝置和排肥裝置組成,如圖1所示。扣垡裝置包括呈對稱布置的2組扣垡犁和安裝于中間位置的對稱翻垡犁,開畦溝裝置包括呈對稱布置的前后組合式鏵式犁,排種裝置選用離心式油菜精量排種器[20]。整機種床耕整主要技術參數如表1所示。
1.2 工作過程
犁旋組合式油菜直播機由輪式拖拉機提供動力,作業時,扣垡裝置通過呈對稱布置的2組扣垡犁和對稱翻垡犁完成橫向1 540 mm廂面土壤的翻埋、側邊扣垡、埋茬作業;旋耕裝置由PTO輸出動力,完成碎土、土壤側向輸送和平整廂面作業;由對稱布置在旋耕裝置兩側的開畦溝前犁完成兩側深耕和深耕盲區底層土壤的擾動,即減小深耕盲區作業和破土作業,開畦溝后犁作業形成完整畦溝;同步的排肥裝置排出肥料,完成施肥作業;排種裝置排出油菜種子,經導種管投放至作業形成的種床。

圖1 犁旋組合式油菜直播機結構示意圖Fig.1 Schematic of plowing-rotating combined rapeseed direct seeding machine1.排種裝置 2.排肥裝置 3.旋耕裝置 4.主機架 5.三點懸掛 6.開畦溝后犁 7.開畦溝前犁 8.對稱翻垡犁 9.扣垡犁

表1 犁旋組合式油菜直播機種床耕整主要技術參數Tab.1 Main technical parameters of seedbed tillage of plowing-rotating combined rapeseed direct seeding machine
2 關鍵部件設計與分析
2.1 扣垡犁
2.1.1扣垡犁曲面形成原理
鏵式犁翻垡過程大致分為滾垡和竄垡兩種形式,滾垡過程分為切土、抬垡和翻垡3個階段,但在高茬水稻秸稈工況下,其翻垡階段由于高茬水稻形成較強支撐,易造成回垡或立垡,難以完成土垡翻埋;竄垡方式作業時,土垡沿犁體曲面上竄到一定高度后懸空扣翻,高茬水稻秸稈工況下能實現土垡翻埋,但不規則土垡翻埋不利于下一步耕整作業[21]。基于土垡寬深比達到翻轉后能處于穩定狀態的要求,參考滾垡有序翻埋和竄垡高空扣翻的優點,提出土垡先抬后扣的側邊扣垡工藝方案,設計一種能實現高茬水稻秸稈工況下側邊扣垡功能扣垡犁。
根據直紋曲面形成原理,扣垡犁犁體曲面如圖2所示。一空間母線AE沿著導線A-B-C-D,并按照單位向量變化規律(即與x軸夾角θ變化規律),自下而上平行移動,形成犁體曲面。主要包括犁鏵、犁胸和犁翼3部分,犁鏵完成破土、抬垡功能,犁胸使土垡向斜上方初步翻轉和遷移,犁翼使土垡進一步翻轉和下落,最終完成土垡側邊扣垡作業。
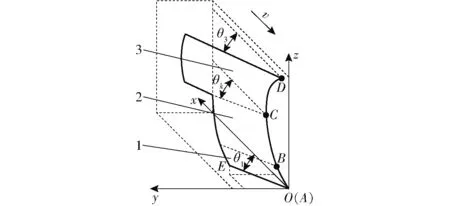
圖2 扣垡犁犁體曲面形成原理圖Fig.2 Schematic of surface formation of bucking plow body1.犁鏵 2.犁胸 3.犁翼
2.1.2扣垡犁曲面參數分析與建模
扣垡犁犁體曲面的工作性能主要由導線、母線和單位向量變化規律決定。建立導線數學模型,如圖3所示。第1段AB選取直線,對應犁鏵部分;第2段BC選取拋物線,其斜率逐漸變大,易于翻垡,對應犁胸部分;第3段CD選取圓弧,其斜率增長較快,易于翻扣,對應犁翼部分。取各段端點A(0,0)、B(x1,z1)、C(x2,z2)、D(x3,z3),為使導曲線各段之間平滑過渡,過渡點斜率應相同,取點B、C斜率為tanα、tanβ。

圖3 導線形狀與參數Fig.3 Guiding curve shape and parameters
導線參數方程為
(1)
式中k、b、c、d、h——常數
R——圓弧半徑,cm
由圖3幾何關系可得
(2)
式中lAB——線段Ⅰ長度,cm
H1——曲線Ⅱ高度,cm
L1——曲線Ⅱ開度,cm
H2——曲線Ⅲ高度,cm
聯立方程(1)、(2)可得
(3)
由式(3)可知,導曲線參數方程由線段Ⅰ斜率tanα和長度lAB、曲線Ⅱ的高度H1和開度L1、曲線Ⅲ的高度H2決定。參考農機設計手冊犁體曲面導曲線設計方法[22],取入土角α為25°,lAB影響土垡提升高度,取15 cm,曲線Ⅱ開度L1取13.4 cm、高度H1取25.7 cm,曲線Ⅲ高度H2取10 cm,R取27.2 cm,代入式(3)求出常數k為0.47,b為3.75×10-2,c為0.40,d為6.14,h為20.87,得出導線參數方程。
扣垡犁用于油菜直播作業前的土壤翻埋,作業時不需形成完整的溝壁,通過土壤之間的相互撕扯形成不規則的矩形截面土垡,故扣垡犁設計寬度應小于實際作業幅寬。E點坐標為(l0tanθ0cosα1,l0,l0tanθ0sinα1),其中l0為扣垡犁寬度,θ0為AE與AB夾角,結合實際田間試驗,取l0為20 cm,滿足橫向30 cm土垡扣垡作業,為提高犁鏵入土性能,θ0取45°,則θ1為50°。
為使土垡能較完全地扣垡,取θ角變化規律為逐漸減小,且犁胸位置減小較慢尾翼位置減小較快,如圖4所示,z0~z1段選取直線,z1~z3段選取拋物線,參數方程可表示為
(4)
式中a0——常數
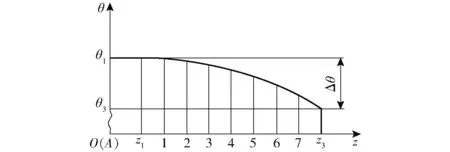
圖4 夾角變化曲線Fig.4 Curve of angle change
已知θ1為50°,z1為lABsinα1,z3為42 cm,參考農機設計手冊犁體曲面元線角設計方法,取Δθ為10°,因此θ3為40°,代入式(4)得a0為-7.9×10-3,故夾角θ在z1~z3段拋物線開口向下,形成犁胸至尾翼這部分空間曲面時,空間母線與犁體前進方向相反方向的夾角逐漸變小,且犁胸位置減小較慢,尾翼位置減小較快。
根據扣垡犁導線、母線和單位向量變化規律,制作犁體曲面樣件,加工試制扣垡犁。
2.1.3犁體曲面扣垡過程分析
土垡在犁體曲面上的運動過程十分復雜,為分析其翻垡過程,取連續垡條中一段開展研究,作如下假設:①把所取某階段土垡視做剛體,不考慮其內力和變形。②土垡在犁體曲面上運動時緊貼曲面。③土垡截面近似視作矩形。
扣垡犁作業時,犁鏵破土形成矩形截面的土垡,經犁鏵抬升后在犁胸位置初步翻轉和進一步抬升,最后經尾翼翻扣,直至與犁體曲面脫離接觸,運動軌跡簡圖如圖5所示。當土垡在犁鏵上運動時,不發生翻轉,土垡受力可合成至質心位置,建立動力學方程
(5)
式中m——土垡質量,kg
ax——土垡x軸方向加速度,m/s2
ay——土垡y軸方向加速度,m/s2
az——土垡z軸方向加速度,m/s2
N——犁鏵對土垡支持力,N
G——土垡自身重力,N
Ft——下方土垡對其擠壓力,N
Fs——上方土垡對其反作用力,N
f——犁鏵對土垡的摩擦阻力,N

圖5 土垡運動軌跡與犁鏵位置受力簡圖Fig.5 Schematic of track of motion of furrow slice and force of plowshare position
由式(5)可知,土垡在犁鏵上運動時,土垡y軸方向加速度為0,因此可得土垡受合力為
(6)
故土垡在犁鏵上運動時,所受合力與xz平面平行。土垡沿犁鏵以夾角α向水平面斜上方運動至犁胸位置,完成土垡上抬作業。
當土垡運動至犁胸位置,所受作用力為空間任意力系,不僅在外力作用下沿著犁胸向斜上方運動,同時會發生翻轉,其受力分析如圖6所示,并建立動力學方程
(7)
式中Nxz——犁鏵對土垡支持力在xz面分力,N
Ftxz——下方土垡對其擠壓力在xz面分力,N
Fsxz——上方土垡對其反作用力在xz面分力,N
fxz——犁鏵對土垡摩擦阻力在xz面分力,N
δ——土垡位置切線與x軸夾角,(°)
My——土垡繞y軸轉動的扭矩,N·m
la、lb、lc、ld——各受力相對質心的力臂,m
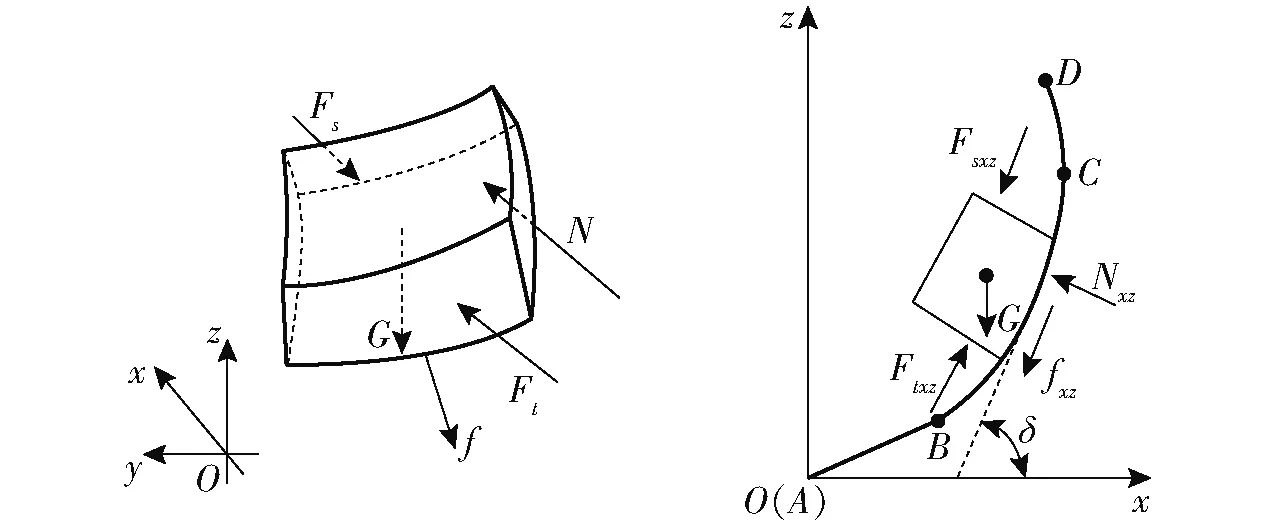
圖6 土垡犁胸位置受力簡圖Fig.6 Schematic of force of furrow slice at position of plow chest
土垡在犁胸位置運動時,由于犁體曲面對土垡作用力合力方向不經過質心,土垡會產生翻轉。由圖6和式(7)可知,土垡所受作用力在xz平面上合力使土垡運動在xz平面分量表現為向斜上方運動,且產生繞y軸轉動力偶。由導線和單位向量與x軸夾角θ變化規律幾何關系可知,土垡在犁胸位置主要為沿犁胸向斜上方遷移和繞y軸轉動;由于土垡所受空間力系不平衡,土垡同時沿x、z軸產生一定翻轉。
當土垡運動至犁翼位置,犁面對土垡作用力方向改變,使土垡向下翻扣,其受力分析如圖7所示。
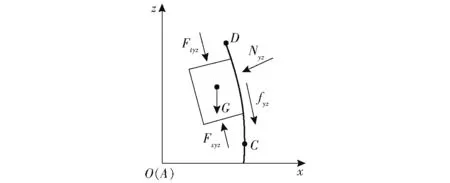
圖7 土垡犁翼位置受力簡圖Fig.7 Schematic of force of furrow slice at position of plow blade
土垡在犁翼位置運動時,由導線幾何性質和單位向量與x軸夾角θ變化規律可知,導線為圓弧,且單位向量與x軸夾角θ減小逐漸加快,土垡運動主要為沿x軸轉動,直至與犁體曲面脫離接觸。
綜上可知,土垡在犁體曲面上的運動過程為先沿犁鏵以夾角α沿水平面斜上方運動至犁胸位置;然后土垡主要沿犁胸向斜上方遷移并繞y軸轉動,同時在x、z軸方向產生一定翻轉;土垡在犁翼位置主要表現為沿著x軸轉動,直至與犁體曲面脫離接觸,在自身重力作用下落地,完成翻轉作業,故設計的直紋曲面能實現土垡先上抬后翻扣的功能。
2.2 扣垡裝置
扣垡犁寬度為200 mm,耕作寬度為300 mm,對稱翻垡犁寬度為250 mm,耕作寬度為340 mm;扣垡裝置由對稱布置的2組扣垡犁和安裝于中間位置的對稱翻垡犁組成,相鄰的2個扣垡犁橫向中心安裝間距為300 mm,相鄰的扣垡犁和對稱翻垡犁橫向中心安裝間距為320 mm,而單個扣垡犁由于作業時兩側土壤撕扯,平均耕寬應在300 mm以上,能避免漏耕,扣垡裝置理論作業幅寬為1 540 mm。作業時,安裝于前端的扣垡犁先將土垡翻埋至未耕地表,位于后側的扣垡犁將緊挨的土垡翻埋至前一犁體作業形成的槽溝,對稱翻垡犁將廂面中間未耕土垡對稱切割,并通過兩側犁體曲面將切割后兩土垡翻轉。扣垡犁結構示意圖如圖8a所示,對稱翻垡犁結構示意圖如圖8b所示。
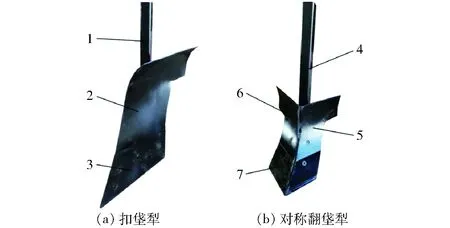
圖8 扣垡犁和對稱翻垡犁結構示意圖Fig.8 Structural diagrams of symmetrical buckle plow1.扣垡犁犁柱 2.扣垡犁犁體曲面 3.扣垡犁犁鏵 4.對稱翻垡犁犁柱 5.對稱翻垡犁犁體曲面 6.對稱翻垡犁破土刃 7.對稱翻垡犁犁鏵
對稱翻垡犁作業時,土垡沿犁鏵向上運動,同時破土刃完成土垡對稱切割,減小土垡斷裂處土壤撕扯,避免因兩側土壤不均勻造成堵土;為避免夾土和秸稈拖拽,破土刃口垂直于水平面。對稱翻垡犁曲面由2個對稱的翻垡犁體曲面焊合脛刃線形成,單側犁體曲面設計采用水平直元線法,為使其具有較好的翻垡效果,犁體曲面設計為半螺旋型。
2.3 旋耕裝置與開畦溝裝置
扣垡裝置作業后廂面土壤呈對稱分布,且外側多中間少,旋耕裝置完成碎土作業的同時,需同步實現土壤向廂面內側遷移的功能,達到廂面平整的目的。旋耕裝置作業時,單個旋耕刀片做余擺線運動,切削形成的垡塊向斜后方拋撒。旋耕刀輥采用雙頭螺旋排布方式,為實現旋耕刀輥使土壤向廂面內側遷移的功能,提出一種同一回轉平面內“倒U”形安裝方式,左刀輥安裝右彎刀,作業時切削垡塊向右后方拋撒,右刀輥安裝左彎刀,作業時切削垡塊向左后方拋撒,達到土壤向中間輸送的目的。
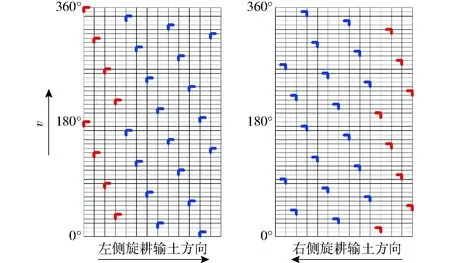
圖9 犁旋組合式油菜直播機旋耕裝置刀片排布示意圖Fig.9 Schematic of blade arrangement of rotary tillage device of plowing and rotary tillage combined rape seed direct seeder
旋耕裝置左右刀輥均為26把,同一回轉平面兩刀夾角取180°,旋耕刀采用雙頭螺旋排列方式,其中同一螺旋線軸向相鄰兩刀夾角為70°,刀座間距為70 mm;為減小深耕盲區對種床影響,同時提高土壤向內側輸送能力,適當增大深耕盲區旋耕耕深,參考GB/T 5669—2017 《旋耕機械 刀和刀座》[23],內側刀片選取ⅡT245旋耕刀,外側刀片選取ⅡT260旋耕刀。犁旋組合式油菜直播機旋耕裝置刀片排布如圖9所示。
選取前后組合式開畦溝裝置[24],主要由鏵式前犁和鏵式后犁組成。扣垡裝置作業后,鏵式前犁完成畦溝破土、外側土垡翻垡和擾動,將外側土垡輸送至旋耕刀輥,同時減小種床未深耕盲區,旋耕裝置完成土壤細碎、平整和內側輸送,鏵式后犁完成畦溝整形,形成適宜油菜播種的種床。
3 田間試驗
3.1 試驗條件與設備
為驗證設計的扣垡裝置功能和犁旋組合式油菜直播機作業性能,于2019年9月在華中農業大學現代農業科學試驗基地開展扣垡犁單體試驗,于2019年10月在湖北省監利縣華中農業大學稻-油輪作全程機械化生產示范基地開展犁旋組合式油菜直播機作業性能試驗,以成熟應用的且僅有旋耕裝置的2BFQ-8型油菜直播機[25](以下簡稱旋耕式油菜直播機)為對照。試驗田塊均常年采用稻-油輪作模式,土壤為偏黏性土,試驗前各田塊工況如表2所示。

表2 試驗田塊工況參數Tab.2 Working condition parameters of test field
扣垡裝置功能性試驗和犁旋組合式油菜直播機作業性能試驗配套動力分別為東方紅954型和東風井關954型輪式拖拉機,試驗器材包括:直尺(500 mm)、卷尺(5 m)、磁性水平尺(三箭工具有限公司,精度0.002 9°)、土壤堅實度儀(浙江托普儀器有限公司,TJSD-750Ⅱ型,±0.5%)、土壤取樣環刀、干燥箱等。
3.2 試驗方法
扣垡裝置功能性試驗為扣垡犁單體在長江中下游高茬粘重地表扣垡效果的驗證,其中左側扣垡犁與右側扣垡犁呈對稱布置,中間保持合適安裝距離,避免左右兩扣垡犁作業時產生干涉,通過安裝于機架兩側限深輪控制扣垡犁作業深度。試驗前調節限深輪高度,使犁耕深度為180~200 mm;通過調節拖拉機擋位和手油門位置,使試驗臺架平均作業速度為2.5 km/h。試驗機組沿直線方向作業距離為40 m,取中間行程30 m為測量區域,每組試驗重復3次,參考GB/T 14225.3—93《鏵式犁試驗方法》,確定試驗以扣垡率為評價指標,土垡在翻轉后其殘茬表面與水平面夾角小于90°為扣垡,扣垡犁單體作業后扣垡率為
(8)
式中r——扣垡率,%L2——扣垡長度,m
L——測量區域長度,m
犁旋組合式油菜直播機作業性能試驗為對比研究犁旋組合式油菜直播機和旋耕式油菜直播機在長江中下游高茬水稻秸稈工況下種床耕整效果,犁旋組合式油菜直播機如圖10所示。犁旋組合式油菜直播機旋耕額定轉速為240 r/min,試驗前通過調節拖拉機上拉桿高度和液壓手柄位置保證犁耕作業深度為180~200 mm,旋耕深度為90~110 mm,調節拖拉機擋位和手油門位置保證整機平均作業速度為2.5 km/h;旋耕式油菜直播機旋耕額定轉速為270 r/min,耕深為80~120 mm,試驗前調節拖拉機擋位和手油門位置保證平均作業速度為2.5 km/h。試驗機組沿直線方向作業距離為40 m,取中間行程30 m為測量區域,每組試驗重復3次。參考NY/T 499—2013《旋耕機 作業質量》、GB/T 5668—2008《旋耕機》和NT/Y 2709—2015《油菜播種機 作業質量》,結合油菜種植農藝要求,確定試驗以耕深及其穩定性系數、廂面平整度、碎土率和秸稈埋覆率為評價指標。

圖10 試驗機具實物Fig.10 Physical map of test machine
3.3 試驗結果與分析
3.3.1扣垡犁單體田間功能性試驗
扣垡犁在高茬水稻秸稈工況下具有較好的扣垡效果,由表3可知,扣垡犁作業平均耕深在182~191 mm之間,平均扣垡率為93.41%,耕深穩定性系數高于92%,能較好地實現高茬水稻秸稈扣垡功能;平均耕寬在300 mm以上,滿足扣垡犁耕寬設計要求,耕寬穩定性系數在73.26%~81.65%之間,分析認為扣垡犁破土抬垡作業時通過土壤之間相互撕扯,不形成完整溝壁,實際耕寬大于扣垡犁設計幅寬,耕寬穩定性系數較低是合理的。
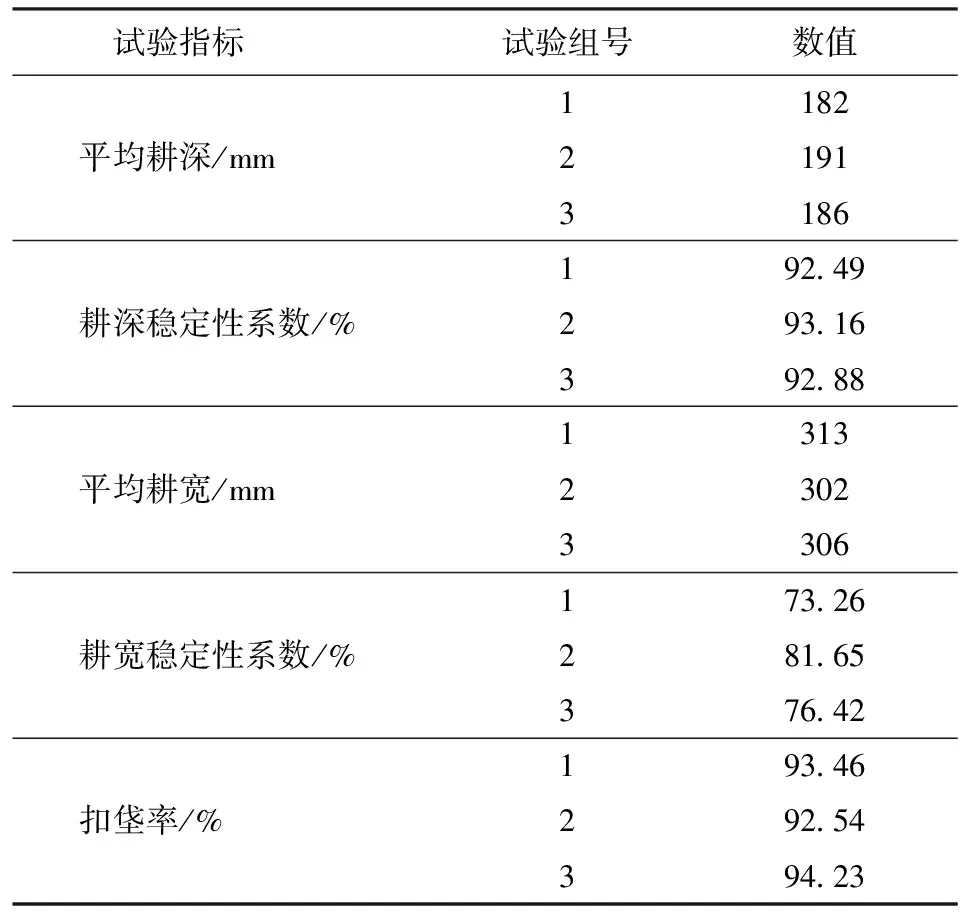
表3 扣垡犁田間試驗結果Tab.3 Field test results of buckle plow
扣垡犁單體能較好地實現扣垡功能,故扣垡裝置具有較好的作業性能。
3.3.2整機田間對比試驗
犁旋組合式油菜直播機在高茬水稻秸稈工況下具有較好的種床耕整效果,田間作業效果如圖11所示;犁旋組合式油菜直播機和旋耕式油菜直播機耕深及其穩定性系數、廂面平整度和碎土率均滿足油菜播種要求,作業后各評價指標見表4。

圖11 整機田間作業Fig.11 Field test of complete machine
由表4可知,在工況2、3下,犁旋組合式油菜直播機平均耕深分別為249、231 mm,相對旋耕式油菜直播機平均耕深分別提高了137、110 mm;秸稈埋覆率分別為90.35%、91.24%,相對旋耕式油菜直播機秸稈埋覆率分別提高了33.94、28.36個百分點。
在高茬水稻秸稈的工況下,旋耕式油菜直播機作業時旋耕刀先與地表秸稈接觸,由于水稻秸稈韌性強,旋耕刀無法有效切斷秸稈,影響其切削土壤能力,導致整機耕深和秸稈埋覆率較低。而犁旋組合式油菜直播機作業時,通過扣垡裝置埋覆秸稈,旋耕裝置細碎平整土壤,從而整機具有較好的作業深度和秸稈埋覆率。

表4 田間對比試驗結果Tab.4 Field comparison test results
綜上分析,在長江中下游稻油輪作高茬水稻秸稈工況下,犁旋組合式油菜直播機作業后耕深和秸稈埋覆率明顯優于旋耕式油菜直播機,提高了作業功效和油菜種床耕整質量,達到了油菜種床耕整要求[26]。
4 結論
(1)為提高油菜直播時的作業耕深和秸稈埋覆率,設計了一種通過先抬、后扣的作業方式,實現高茬粘重土壤有序翻埋的扣垡犁,并集成了與油菜直播機配合作業的扣垡裝置,研發了犁翻旋耕組合式油菜直播機。分析闡述了扣垡犁曲面形成原理,確定了其關鍵影響因素導線、元線角、母線的數學模型,構建了土垡與扣垡犁力學模型,闡明了犁體曲面扣垡過程。
(2)扣垡犁單體田間功能性試驗表明:在高茬秸稈工況下,扣垡犁平均耕寬在300 mm以上,滿足扣垡犁耕寬設計要求;扣垡犁作業平均耕深在182~191 mm之間,平均扣垡率為93.41%,耕深穩定性系數高于92%,能較好地實現高茬水稻秸稈的扣垡功能,扣垡裝置作業性能較好。
(3)在2種不同水稻秸稈工況下,兩機具作業質量均滿足油菜播種要求;犁旋組合式油菜直播機平均耕深分別為249、231 mm,相對旋耕式油菜直播機平均耕深分別提高了137、110 mm;秸稈埋覆率分別為90.35%、91.24%,相對旋耕式油菜直播機秸稈埋覆率分別提高了33.94、28.36個百分點,耕整效果優于僅有旋耕裝置的油菜直播機。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08