精密播種機(jī)下壓力和播深CAN總線監(jiān)控與評(píng)價(jià)系統(tǒng)研究
2020-06-29 01:17:10高原源翟長(zhǎng)遠(yuǎn)趙學(xué)觀趙春江
農(nóng)業(yè)機(jī)械學(xué)報(bào) 2020年6期
高原源 翟長(zhǎng)遠(yuǎn) 楊 碩, 趙學(xué)觀 王 秀,3 趙春江,3
(1.中國(guó)農(nóng)業(yè)大學(xué)信息與電氣工程學(xué)院, 北京 100083; 2.北京農(nóng)業(yè)智能裝備技術(shù)研究中心, 北京 100097;3.國(guó)家農(nóng)業(yè)信息化工程技術(shù)研究中心, 北京 100097)
0 引言
精密播種技術(shù)是將定量的良種按照農(nóng)藝要求的行距、株距和播種深度(播深)進(jìn)行穴播和種肥深施的機(jī)械化播種技術(shù)[1],因其節(jié)本增效的突出優(yōu)勢(shì)而得到了高度重視和廣泛應(yīng)用[2-3]。精密播種機(jī)是實(shí)現(xiàn)精密播種的關(guān)鍵,其播種粒距均勻性和播深穩(wěn)定性直接影響出苗質(zhì)量和最終作物產(chǎn)量[4]。隨著農(nóng)業(yè)信息技術(shù)的發(fā)展,播種作業(yè)參數(shù)的智能化監(jiān)控與評(píng)價(jià)已成為提高播種質(zhì)量的重要手段。
在播種質(zhì)量監(jiān)控評(píng)價(jià)方面,國(guó)外農(nóng)機(jī)企業(yè)研究較早,已實(shí)現(xiàn)不同作業(yè)參數(shù)的實(shí)時(shí)監(jiān)控,如John Deere公司研發(fā)的TruSet耕作技術(shù)[5],調(diào)節(jié)時(shí)間不超過(guò)6 s,可根據(jù)駕駛室終端處方圖自動(dòng)調(diào)整作業(yè)深度和下壓力,以提高耕作窗口期作業(yè)效率。Ag Leader公司研發(fā)了InCommand系統(tǒng)[6],可對(duì)播種量、粒距等指標(biāo)進(jìn)行監(jiān)測(cè)和評(píng)價(jià),搭配SureForce技術(shù)也可實(shí)時(shí)調(diào)整單體對(duì)地下壓力。此外,Kinze公司開發(fā)了True Depth下壓力控制系統(tǒng)和Blue Vantage遠(yuǎn)程監(jiān)控系統(tǒng)[7],Precision Planting公司開發(fā)了SeederForce下壓力控制系統(tǒng)和20/20 SeedSense終端監(jiān)測(cè)系統(tǒng)[8]。國(guó)內(nèi)相關(guān)研究多側(cè)重于對(duì)播種粒距的監(jiān)控評(píng)價(jià)和播種深度的監(jiān)控上,已實(shí)現(xiàn)了播種機(jī)的高速精量播種[9-11]、排種質(zhì)量監(jiān)測(cè)[12-14]、播深實(shí)時(shí)測(cè)量與控制[15-17]。隨著保護(hù)性耕作技術(shù)的推廣,地表起伏和殘茬覆蓋等復(fù)雜工況對(duì)播深和下壓力控制性能提出了更高要求。研究表明,適宜的播種下壓力不僅可以提高播深穩(wěn)定性,還可避免種溝過(guò)度壓實(shí),從而提高種子墑情和作物產(chǎn)量[18-20]。為減小土壤區(qū)間阻力變化對(duì)播深的影響,文獻(xiàn)[21]通過(guò)檢測(cè)開溝壓力來(lái)調(diào)節(jié)仿形機(jī)構(gòu)對(duì)地壓力,以保證穩(wěn)定一致的開溝深度;文獻(xiàn)[22]提出了基于壓電薄膜的限深輪測(cè)力方式,通過(guò)調(diào)節(jié)四連桿上氣囊壓力來(lái)控制播深;文獻(xiàn)[23-24]設(shè)計(jì)了播種單體下壓力控制系統(tǒng),以提高復(fù)雜工況下的播深穩(wěn)定性。
分析發(fā)現(xiàn),國(guó)外監(jiān)控系統(tǒng)涵蓋粒距、播深和下壓力等多方面質(zhì)量參數(shù),其功能復(fù)雜,對(duì)駕駛員操作技能和拖拉機(jī)設(shè)備通信要求較高,且需搭配相應(yīng)配件方可使用,價(jià)格昂貴。國(guó)內(nèi)除播種粒距研究之外雖已開展了下壓力監(jiān)控方面的研究,但均以播種單體試驗(yàn)為主,且主要用于播深控制,缺少整機(jī)系統(tǒng)研究及下壓力自身作業(yè)效果的監(jiān)測(cè)評(píng)價(jià)。文獻(xiàn)[25]試驗(yàn)發(fā)現(xiàn),設(shè)定播深和下壓力均影響實(shí)際播種深度。因此,單獨(dú)下壓力或播深的監(jiān)控已無(wú)法滿足精密播種需求,實(shí)現(xiàn)兩者一體化的實(shí)時(shí)監(jiān)控與現(xiàn)場(chǎng)評(píng)價(jià)將更有助于提高播種質(zhì)量。隨著播種機(jī)功能的擴(kuò)展,現(xiàn)有系統(tǒng)多采用的點(diǎn)對(duì)點(diǎn)單一通信方式的信號(hào)利用率低,多路通信時(shí)布線繁雜,且不易擴(kuò)展[26]。作為農(nóng)機(jī)裝備應(yīng)用最廣泛的通信方式之一[27],基于ISO 11783協(xié)議標(biāo)準(zhǔn)的控制局域網(wǎng)(Controller area network,CAN)現(xiàn)場(chǎng)總線技術(shù)具有高可靠性、實(shí)時(shí)性和靈活性等優(yōu)點(diǎn),開發(fā)相應(yīng)的總線控制系統(tǒng)已成為農(nóng)機(jī)裝備智能化研究的熱點(diǎn)[28]。
本文在前期研究基礎(chǔ)上,設(shè)計(jì)一種基于CAN總線的播種機(jī)下壓力和播深監(jiān)控平臺(tái)與質(zhì)量評(píng)價(jià)系統(tǒng),采用基于角度和軸銷傳感器的播深和下壓力測(cè)量裝置,優(yōu)化設(shè)計(jì)氣壓驅(qū)動(dòng)裝置,以減小氣量損失、提高系統(tǒng)響應(yīng)速度,開發(fā)基于CoDeSys編程環(huán)境的智能終端交互界面和ECU控制程序,以期實(shí)現(xiàn)播深和下壓力的監(jiān)測(cè)控制和質(zhì)量評(píng)價(jià),提高多行播種機(jī)系統(tǒng)控制性能和智能化水平。
1 系統(tǒng)設(shè)計(jì)
1.1 系統(tǒng)組成和工作原理
如圖1所示,下壓力和播深監(jiān)控與評(píng)價(jià)系統(tǒng)主要由下壓力測(cè)量裝置、播深測(cè)量裝置、機(jī)具ECU、GNSS傳感器、智能終端和氣壓驅(qū)動(dòng)裝置組成。

圖1 系統(tǒng)組成Fig.1 System components
其中,ECU為HY-TTC32型集成控制器,搭載的多路自由配置I/O接口可滿足系統(tǒng)傳感器數(shù)據(jù)采集和執(zhí)行器控制需求;GNSS傳感器、下壓力和播深測(cè)量裝置用于實(shí)時(shí)檢測(cè)作業(yè)過(guò)程中包括播種機(jī)速度、位置、下壓力和播深等信息,并反饋給ECU來(lái)控制氣壓驅(qū)動(dòng)裝置調(diào)節(jié)播種機(jī)對(duì)地下壓力,提高播深穩(wěn)定性;智能終端自帶多個(gè)RS232和USB通信接口,搭配PCAN-USB轉(zhuǎn)換器與ECU總線通信,運(yùn)行基于CoDeSys Visualizations開發(fā)的人機(jī)交互界面,可實(shí)現(xiàn)播種作業(yè)參數(shù)的設(shè)置、作業(yè)信息的實(shí)時(shí)監(jiān)測(cè)和作業(yè)效果的在線評(píng)價(jià)。通過(guò)該系統(tǒng)可實(shí)時(shí)調(diào)節(jié)播種單體對(duì)地下壓力,同時(shí)監(jiān)測(cè)播深和下壓力作業(yè)效果,實(shí)現(xiàn)對(duì)作業(yè)區(qū)域播深穩(wěn)定性和下壓力一致性的控制,在提高播深穩(wěn)定性基礎(chǔ)上,避免種溝側(cè)壁壓實(shí),促進(jìn)種子生長(zhǎng)發(fā)育。
1.2 硬件設(shè)計(jì)
1.2.1下壓力和播深測(cè)量裝置
由于單體限深輪直接接觸并壓實(shí)土壤,其對(duì)地作用力和相對(duì)開溝器位置可直接反映播種下壓力和播深。前期通過(guò)對(duì)限深輪的力學(xué)分析和數(shù)學(xué)模型研究,發(fā)現(xiàn)播深和下壓力之間存在交互作用,即地表起伏等情況會(huì)造成播深和下壓力同時(shí)變化[29]。為提高質(zhì)量評(píng)價(jià)完整性和準(zhǔn)確性,本系統(tǒng)優(yōu)先采用基于限深輪的下壓力和播深同步測(cè)量方式。
下壓力測(cè)量裝置用于測(cè)量作業(yè)地面與限深輪之間相互作用力,并反饋給ECU來(lái)控制氣壓驅(qū)動(dòng)裝置,實(shí)時(shí)調(diào)整對(duì)地下壓力,包括軸銷傳感器和壓力變送器,相關(guān)參數(shù)設(shè)計(jì)可見文獻(xiàn)[29],此處不再敘述。如圖2a所示,軸銷傳感器(ZHZX-N18型,蚌埠眾城傳感器有限公司)通過(guò)替換單體原有限深銷軸來(lái)實(shí)時(shí)監(jiān)測(cè)限深輪作用下的軸銷形變量,量程為6 000 N,而壓力變送器用于將軸銷傳感器信號(hào)放大,變換為0~5 V模擬信號(hào)。

圖2 下壓力與播深測(cè)量裝置Fig.2 Downforce and sowing depth measurement devices1、13.限深臂 2.播深調(diào)節(jié)機(jī)構(gòu) 3.機(jī)架 4.傳感器固定片 5.軸銷傳感器 6.限深塊 7.傳感器保護(hù)套 8.角度傳感器 9.聯(lián)軸器 10.聯(lián)軸器套 11.連接螺栓 12.擺臂銷軸
如圖2b所示,播深測(cè)量裝置通過(guò)角度傳感器所測(cè)限深臂擺動(dòng)角來(lái)計(jì)算單體開溝深度,可實(shí)現(xiàn)作業(yè)過(guò)程中播深的實(shí)時(shí)監(jiān)測(cè)和評(píng)價(jià),具體結(jié)構(gòu)設(shè)計(jì)參見文獻(xiàn)[30],其中,角度傳感器(WOA-H-90-V1型,深圳市米朗科技有限公司)量程為90°,0~5 V模擬電壓輸出。此外,前期研究發(fā)現(xiàn),不同播深設(shè)置對(duì)下壓力測(cè)量準(zhǔn)確性影響較大,因此本系統(tǒng)融合下壓力測(cè)量裝置和播深測(cè)量裝置,通過(guò)測(cè)定作業(yè)前的設(shè)定播深來(lái)校正下壓力測(cè)量模型,以提高不同設(shè)定播深時(shí)下壓力監(jiān)控準(zhǔn)確性。
1.2.2GNSS傳感器
GNSS傳感器包括接收器和解析模塊,用于獲取機(jī)具實(shí)時(shí)位置和行進(jìn)速度。其中,接收器為深圳市世導(dǎo)通電子科技有限公司所產(chǎn)RS232型GNSS接收器,采樣頻率為1 Hz;解析模塊采用STM32控制板,主控芯片為ATM32F105R8T6,用于對(duì)GNSS接收器所傳數(shù)據(jù)進(jìn)行解析和拆分,集成的bxCAN(Basic extended CAN)接口可實(shí)現(xiàn)與ECU總線通信,通信協(xié)議見文獻(xiàn)[30]。作業(yè)過(guò)程中,接收器根據(jù)NMEA-0183協(xié)議標(biāo)準(zhǔn),將采樣數(shù)據(jù)通過(guò)TTL/232模塊上傳給解析模塊,解析模塊根據(jù)所需參數(shù)信息優(yōu)先選取推薦最小定位信息(Recommended minimum specific GPS/TRANSIT data,RMC)協(xié)議語(yǔ)句,并根據(jù)其格式定義解析獲得機(jī)具經(jīng)緯度和速度等信息。所選協(xié)議語(yǔ)句格式為“$GPRMC,024813.640,A,3158.4608,N,11848.3737,E,10.05,324.27,150706,,,A*50”。
每條語(yǔ)句中不同定義字段通過(guò)“,”進(jìn)行分隔,其中,字段1為UTC時(shí)間,hhmmss.sss格式,在其上加8 h可轉(zhuǎn)換為北京時(shí)間;字段2為狀態(tài),A為定位,V為未定位;字段3為緯度(ddmm.mmmm),度分格式(前導(dǎo)位數(shù)不足則補(bǔ)0);字段4為緯度N(北緯)或S(南緯);字段5為經(jīng)度(dddmm.mmmm),度分格式(前導(dǎo)位數(shù)不足則補(bǔ)0);字段6為經(jīng)度E(東經(jīng))或W(西經(jīng));字段7為速度,單位節(jié),乘以1.852可換算為km/h;字段8為方位角,(°);字段9為UTC日期,DDMMYY格式,如UTC時(shí)間加8后大于24,則日期應(yīng)加1;字段10為磁偏角(0°~180°)(前導(dǎo)位數(shù)不足則補(bǔ)0);字段11為磁偏角方向,E為東,W為西;字段16為校驗(yàn)值。
1.2.3氣壓驅(qū)動(dòng)裝置
為實(shí)現(xiàn)整機(jī)氣動(dòng)式下壓力調(diào)節(jié),本文對(duì)前期單體氣壓驅(qū)動(dòng)裝置[24]進(jìn)行了優(yōu)化設(shè)計(jì),以適應(yīng)整機(jī)氣壓驅(qū)動(dòng)需求,包括氣囊、電氣比例閥、氣體發(fā)生器、氣罐、油液分離器等。氣體發(fā)生器所產(chǎn)空氣經(jīng)單向閥進(jìn)入氣罐,壓縮獲得所需高壓空氣。設(shè)定氣罐安全氣壓為0.7 MPa,并安裝壓力傳感器實(shí)時(shí)監(jiān)測(cè)反饋給ECU,進(jìn)而控制氣體發(fā)生器啟停以保證氣罐安全。氣囊安裝在單體四連桿仿形機(jī)構(gòu)上,其內(nèi)部氣壓可通過(guò)電氣比例閥(VPPM型,F(xiàn)ESTO公司)進(jìn)行調(diào)節(jié),從而改變作用在四連桿上壓力。由于ECU只能輸出模擬電壓信號(hào),為此采用信號(hào)隔離器(MIK-402Y-1-3-2-1-1型,杭州米科傳感器技術(shù)有限公司)將電氣比例閥控制信號(hào)從0~5 V轉(zhuǎn)變?yōu)?~20 mA,同時(shí)采集比例閥輸出口壓力,實(shí)現(xiàn)設(shè)定壓力的PID控制。考慮播種機(jī)作業(yè)區(qū)域內(nèi)土壤質(zhì)地差異性和比例閥自身特性,裝置將6行播種機(jī)等分為左右3行區(qū)域,并分別采用1個(gè)比例閥進(jìn)行單獨(dú)分區(qū)控制,以期提高系統(tǒng)控制精度和響應(yīng)速度。
實(shí)際作業(yè)中,土壤阻力的變化會(huì)造成氣囊壓力的較大波動(dòng),高壓空氣的快速充放對(duì)氣體發(fā)生裝置性能提出更高要求。為此,一方面增大氣體容量,采用雙氣罐設(shè)計(jì);另一方面增大氣體流量,優(yōu)化設(shè)計(jì)液壓驅(qū)動(dòng)式氣體發(fā)生器,包括電磁換向閥、調(diào)速閥(FR10-39型,上海莘燁液壓傳動(dòng)有限公司,最大流量38 L/min)、液壓馬達(dá)(BMM-32型)和雙缸氣泵(65型,氣量250 L/min,最大轉(zhuǎn)速1 100 r/min)等。作用原理如圖3所示,默認(rèn)情況下拖拉機(jī)液壓油直接回流油箱,當(dāng)ECU輸出12 V開關(guān)信號(hào)控制電磁閥換向后,液壓馬達(dá)在液壓油驅(qū)動(dòng)下帶動(dòng)雙缸氣泵工作,向氣罐產(chǎn)生高壓空氣。考慮到拖拉機(jī)液壓油輸出流量隨工況而變化,增加調(diào)速閥改變馬達(dá)作業(yè)速度。

圖3 氣體發(fā)生器工作原理Fig.3 Working principle of gas generator1、5.油缸 2.調(diào)速閥 3.液壓馬達(dá) 4.氣泵 6.過(guò)濾器 7.電磁換向閥
1.3 軟件設(shè)計(jì)
1.3.1界面設(shè)計(jì)
在編程環(huán)境選擇上,采用CoDeSys(Controlled development system)作為PLC軟件編程工具,其支持IEC61131-3標(biāo)準(zhǔn)ST、FBD等6種PLC編程語(yǔ)言,自帶的CoDeSys Visualizations功能具有較多控制模塊,可實(shí)現(xiàn)顯示器界面的開發(fā),對(duì)后期平臺(tái)移植和擴(kuò)展具有重要作用。為此,開發(fā)了基于CoDeSys編程環(huán)境的上位機(jī)軟件,包括監(jiān)控界面和控制程序兩部分。
圖4為人機(jī)交互界面,包括系統(tǒng)開關(guān)、作業(yè)參數(shù)設(shè)置、GNSS信息顯示(位置和車速)、氣罐和氣囊壓力監(jiān)測(cè)、播種下壓力和播深圖形化顯示和質(zhì)量評(píng)價(jià)以及數(shù)據(jù)存儲(chǔ)、下壓力測(cè)量模型校正等功能。其中,系統(tǒng)開關(guān)按鈕用于啟停系統(tǒng),設(shè)置的作業(yè)參數(shù)包括目標(biāo)下壓力、調(diào)節(jié)閾值、控制間隔和設(shè)定播深等,播種下壓力和播深監(jiān)測(cè)評(píng)價(jià)界面可實(shí)時(shí)顯示各播種行下壓力和播深,并對(duì)播種質(zhì)量進(jìn)行在線評(píng)價(jià),包括播深和下壓力行間極值和區(qū)間質(zhì)量指數(shù)。此外,“氣動(dòng)控制”按鈕用于啟動(dòng)氣泵和下壓力控制;“數(shù)據(jù)存儲(chǔ)”按鈕用于控制播種機(jī)作業(yè)信息CAN報(bào)文的發(fā)送,以實(shí)現(xiàn)上位機(jī)數(shù)據(jù)存儲(chǔ);“模型校準(zhǔn)”點(diǎn)觸按鈕用于試驗(yàn)前根據(jù)不同設(shè)定播深進(jìn)行下壓力測(cè)量模型校正。為減小田間作業(yè)振動(dòng)對(duì)傳感器信號(hào)測(cè)量的影響,前期對(duì)不同耕作方式和車速下播深和下壓力信號(hào)變化特性進(jìn)行分析發(fā)現(xiàn),兩者信號(hào)主頻受車速和耕作方式影響較小,且免耕地下振蕩幅值大于旋耕地[29-30],為此界面設(shè)置“濾波系數(shù)”輸入框,采用一階低通濾波方式以保證適宜的下壓力和播深信號(hào)采集效果。

圖4 人機(jī)交互界面Fig.4 Human machine interface
1.3.2控制程序設(shè)計(jì)
系統(tǒng)程序控制流程如圖5所示,主要包括參數(shù)設(shè)置、信號(hào)采集、質(zhì)量評(píng)價(jià)、氣動(dòng)控制和數(shù)據(jù)發(fā)送等部分。首先,系統(tǒng)啟動(dòng)并與ECU建立通信,ECU讀取界面參數(shù)設(shè)定值,采集GNSS、下壓力和播深原始信號(hào),根據(jù)協(xié)議和模型解析并顯示相關(guān)參數(shù)值。經(jīng)過(guò)下壓力測(cè)量模型校正、下壓力和播深設(shè)定后,系統(tǒng)啟動(dòng)播種質(zhì)量評(píng)價(jià)。設(shè)定程序循環(huán)周期為50 ms,即20 Hz采樣頻率,本系統(tǒng)選擇對(duì)10 s采樣時(shí)間進(jìn)行評(píng)價(jià),對(duì)每行播種單體而言,程序統(tǒng)計(jì)每200個(gè)下壓力和播深數(shù)據(jù)的合格數(shù),并計(jì)算其合格指數(shù),最后取6行單體合格指數(shù)的平均值作為播種機(jī)下壓力和播深質(zhì)量指數(shù)。其中,播深合格評(píng)價(jià)標(biāo)準(zhǔn)參照農(nóng)業(yè)行業(yè)標(biāo)準(zhǔn)NY/T 1768—2009《免耕播種機(jī)質(zhì)量評(píng)價(jià)技術(shù)規(guī)范》,對(duì)小麥或玉米播種機(jī)而言,其播種深度合格率需不小于75%,且當(dāng)設(shè)定播深小于30 mm時(shí),合格允許誤差為±5 mm,大于30 mm時(shí),允許誤差為±10 mm。而下壓力作業(yè)質(zhì)量與田間土壤狀況有關(guān),尚無(wú)統(tǒng)一標(biāo)準(zhǔn)評(píng)價(jià),傳統(tǒng)作業(yè)中多依靠種植戶經(jīng)驗(yàn)來(lái)設(shè)定,本系統(tǒng)下壓力合格評(píng)價(jià)標(biāo)準(zhǔn)為實(shí)時(shí)下壓力是否處于設(shè)定下壓力閾值范圍內(nèi),通過(guò)對(duì)作業(yè)中試播階段的質(zhì)量評(píng)價(jià)來(lái)及時(shí)調(diào)整后續(xù)設(shè)定下壓力,方便用戶在不依靠經(jīng)驗(yàn)的情況下實(shí)時(shí)調(diào)整下壓力來(lái)適應(yīng)田間土壤狀況。
當(dāng)界面控制開關(guān)打開時(shí),程序啟動(dòng)氣動(dòng)控制部分,主要包括氣體發(fā)生器和氣囊氣壓控制,其中,氣體發(fā)生器的控制主要通過(guò)控制電磁換向閥的通斷來(lái)實(shí)現(xiàn)雙缸氣泵的啟停,當(dāng)氣罐壓力低于0.5 MPa時(shí)啟動(dòng)氣泵,高于0.7 MPa時(shí)關(guān)閉氣泵;氣囊氣壓控制主要根據(jù)實(shí)時(shí)下壓力反饋來(lái)控制電氣比例閥,調(diào)節(jié)氣囊內(nèi)部氣壓,保證實(shí)時(shí)下壓力在設(shè)定閾值范圍內(nèi)。對(duì)分區(qū)控制方式而言,實(shí)時(shí)下壓力為行間下壓力平均值,同時(shí)根據(jù)后續(xù)試驗(yàn)結(jié)果設(shè)置氣囊初始?jí)毫?.4 MPa以提高系統(tǒng)響應(yīng)速度。此外,數(shù)據(jù)發(fā)送部分根據(jù)界面“數(shù)據(jù)存儲(chǔ)”開關(guān)狀態(tài)來(lái)進(jìn)行數(shù)據(jù)的實(shí)時(shí)發(fā)送,借助CAN總線分析儀以實(shí)現(xiàn)數(shù)據(jù)的存儲(chǔ),有利于后續(xù)繪制相關(guān)田間作業(yè)信息圖。
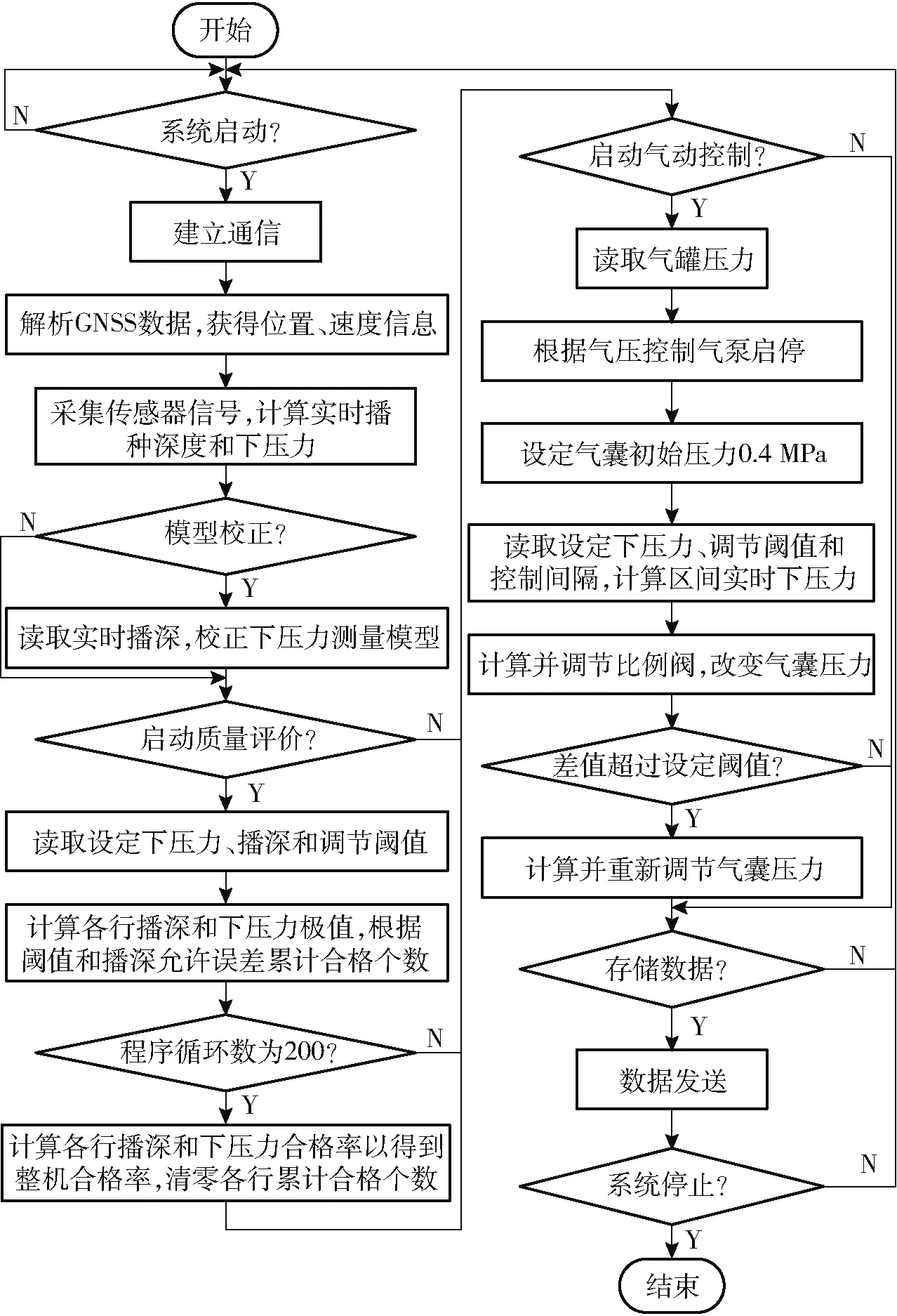
圖5 程序控制流程圖Fig.5 Flow chart of control program
2 播深和下壓力測(cè)量模型建立

圖6 室內(nèi)試驗(yàn)臺(tái)Fig.6 Indoor test bench1.下壓力測(cè)量裝置 2.播深調(diào)節(jié)桿 3.播深測(cè)量裝置 4.電子秤
如圖6所示,搭建試驗(yàn)臺(tái)進(jìn)行室內(nèi)建模試驗(yàn),包括播深和下壓力傳感器標(biāo)定和建模試驗(yàn)。由于6行播種單體結(jié)構(gòu)一致,傳感器校正過(guò)程相同,本文僅對(duì)其中一個(gè)單體試驗(yàn)過(guò)程進(jìn)行敘述。
2.1 播種深度測(cè)量模型
調(diào)節(jié)圖6所示播深調(diào)節(jié)桿,改變不同播深,以此建立單體播深與傳感器反饋值擬合模型。對(duì)本裝置而言,實(shí)際播深可通過(guò)游標(biāo)卡尺測(cè)量限深輪與開溝器之間相對(duì)位置差獲得,播深傳感器反饋值可由USB-6002型數(shù)據(jù)采集卡(美國(guó)國(guó)家儀器有限公司)測(cè)得。每種播深設(shè)定下,重復(fù)測(cè)量3次,取其平均值為實(shí)際播深和反饋值,建立傳感器角度和深度測(cè)量模型為
θ=0.018U-36.27
(1)
H=142.35-3.806θ
(2)
式中U——角度傳感器輸出,mV
θ——限深輪擺臂與機(jī)架夾角,(°)
H——播種深度,mm
2.2 下壓力測(cè)量模型
前期研究發(fā)現(xiàn),不同播深設(shè)定下,同樣壓力作用下得到的下壓力傳感器反饋值差異較大。在上述播深標(biāo)定基礎(chǔ)上,根據(jù)播深和下壓力調(diào)節(jié)范圍,在不同播深設(shè)定下,對(duì)單體施加不同壓力,記錄播深傳感器測(cè)量值、下壓力傳感器測(cè)量值,以及實(shí)際下壓力。其中,實(shí)際下壓力可通過(guò)單體下方電子秤測(cè)得(圖6),傳感器反饋值同樣可由數(shù)據(jù)采集卡測(cè)得。基于多項(xiàng)式逼近擬合方式,最終建立實(shí)際下壓力監(jiān)測(cè)模型方程為
fA=1 715+1.17fS-7 569γ-0.961 6fSγ+7 321γ2
(3)
其中
γ=πθ/180
式中fA——實(shí)際播種下壓力,N
fS——軸銷傳感器壓力檢測(cè)值,N
γ——限深臂角度測(cè)量值,rad
同理,將式(2)代入式(3)可得融合播深的下壓力測(cè)量模型
fA=0.54fS-9.12H-0.004 4fSH+0.15H2-106.26
(4)
對(duì)不同單體,根據(jù)式(4)模型,在測(cè)得播深和檢測(cè)下壓力基礎(chǔ)上可計(jì)算得到各單體行實(shí)際播種下壓力。
3 控制系統(tǒng)響應(yīng)測(cè)試試驗(yàn)
3.1 試驗(yàn)方法
作為下壓力和播深控制系統(tǒng)主要執(zhí)行部件,氣囊的充放特性關(guān)系系統(tǒng)整體響應(yīng)性能。為避免下壓力調(diào)節(jié)不及時(shí)而影響播深穩(wěn)定性,有必要對(duì)氣囊階躍響應(yīng)時(shí)間進(jìn)行測(cè)試,以保證設(shè)定下壓力調(diào)節(jié)周期大于氣囊響應(yīng)時(shí)間。文獻(xiàn)[24]已對(duì)單行氣囊響應(yīng)特性進(jìn)行了研究,由于多行播種機(jī)氣囊串聯(lián)對(duì)氣量的需求更大,而分區(qū)控制方式造成的氣量分配也影響著系統(tǒng)響應(yīng)時(shí)間。為此,試驗(yàn)將分別研究不同設(shè)定壓力值和分區(qū)控制氣囊個(gè)數(shù)(即播種行數(shù))對(duì)系統(tǒng)響應(yīng)性能影響。
首先,在0.1~0.6 MPa氣壓范圍內(nèi)選取6個(gè)壓力設(shè)定值,對(duì)分區(qū)控制下的6行氣囊進(jìn)行充氣測(cè)試,并通過(guò)ECU實(shí)時(shí)采集氣囊內(nèi)部氣壓,其中比例閥1控制左區(qū)(1~3行),比例閥2控制右區(qū)(4~6行),區(qū)間內(nèi)氣囊相互串聯(lián)。然后,在上述分區(qū)控制基礎(chǔ)上,分別對(duì)兩氣囊(左1右1)、三氣囊(左2右1)、四氣囊(左2右2)和五氣囊(左3右2)進(jìn)行0.6 MPa充氣階躍響應(yīng)測(cè)試。根據(jù)氣囊壓力傳感器特性,設(shè)置采樣頻率為20 Hz,采用USBCAN分析儀(USBCAN-E-U型,廣州致遠(yuǎn)電子有限公司)和自帶軟件進(jìn)行ECU報(bào)文數(shù)據(jù)的傳輸和存儲(chǔ)。其中,采樣時(shí)間為10s,采樣數(shù)據(jù)200個(gè),利用Excel和Matlab軟件對(duì)數(shù)據(jù)進(jìn)行處理,獲得系統(tǒng)主要響應(yīng)特性參數(shù),包括響應(yīng)超調(diào)量(σp)和調(diào)節(jié)時(shí)間(Ts)。其中,調(diào)節(jié)時(shí)間為達(dá)到穩(wěn)態(tài)值5%誤差范圍內(nèi)所需時(shí)間。超調(diào)量計(jì)算式為
(5)
式中tp——峰值時(shí)間,s
y(tp)——峰值,MPa
y(∞)——穩(wěn)態(tài)值,MPa
3.2 結(jié)果分析
不同設(shè)定氣壓下分區(qū)控制系統(tǒng)響應(yīng)試驗(yàn)結(jié)果如圖7所示。可以看出,左右區(qū)控制響應(yīng)特性曲線基本吻合,說(shuō)明在控制行數(shù)相同情況下,左右區(qū)控制響應(yīng)性能一致,相比整體控制,分區(qū)控制方法可顯著縮短整機(jī)響應(yīng)時(shí)間,提高控制性能。
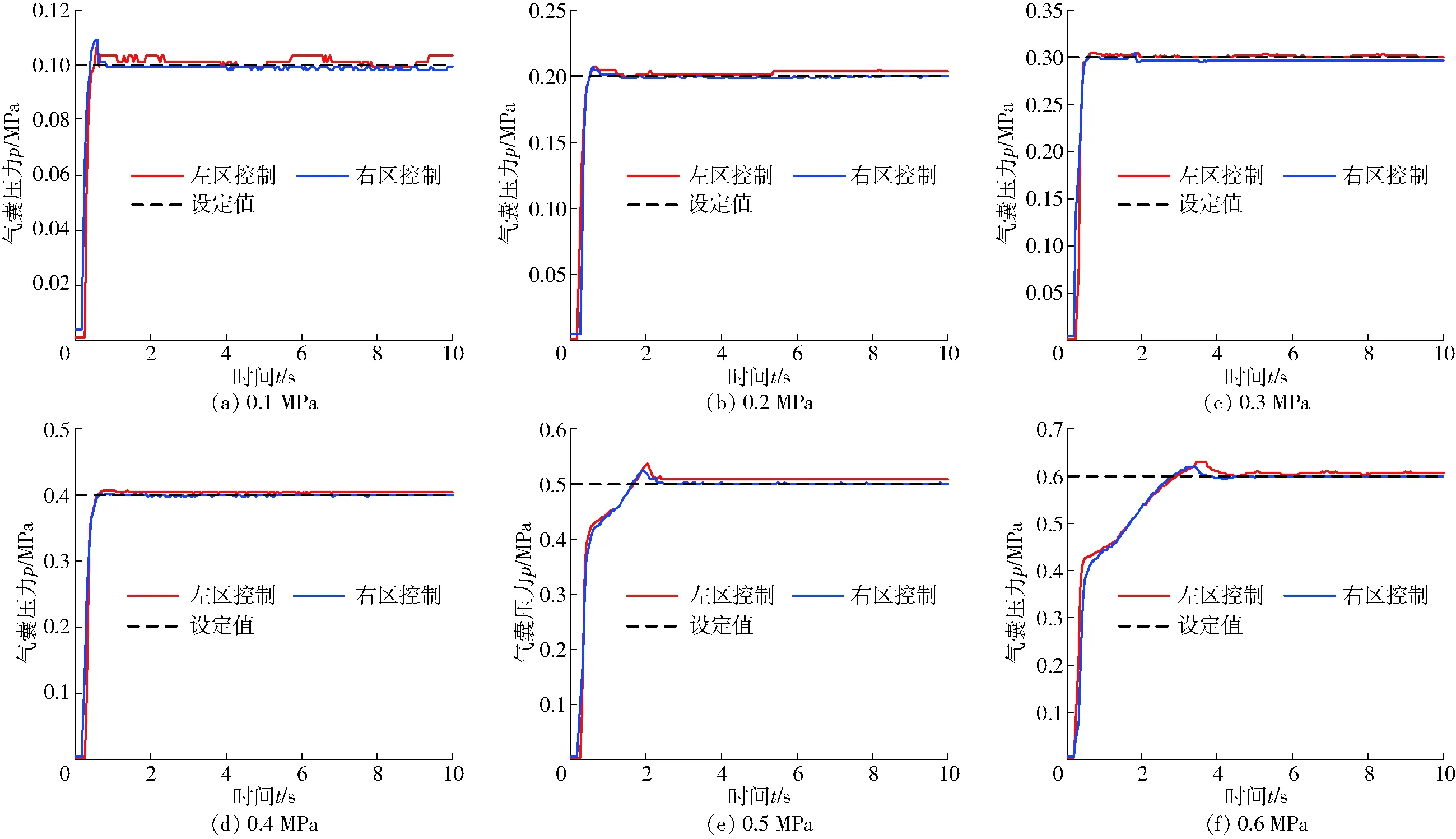
圖7 不同階躍壓力下分區(qū)控制系統(tǒng)響應(yīng)曲線Fig.7 Response curves of section control system under different step pressures
比較左右區(qū)響應(yīng)曲線發(fā)現(xiàn),除0.5 MPa設(shè)定氣壓外,左區(qū)控制穩(wěn)態(tài)誤差在0.001~0.004 MPa,右區(qū)控制穩(wěn)態(tài)誤差在0.001~0.002 MPa,在分區(qū)控制PID參數(shù)相同情況下,其穩(wěn)定性的差異可能來(lái)源于2個(gè)比例閥對(duì)同一控制參數(shù)存在的響應(yīng)差異,由于2種控制方式穩(wěn)態(tài)誤差差值較小,可以認(rèn)為其穩(wěn)定性基本相同。而在0.1 MPa設(shè)定壓力下左區(qū)控制出現(xiàn)較為頻繁的振蕩,原因在于播種機(jī)擺放位置的不平,造成左右區(qū)氣囊初始?xì)鈮翰煌诘蜌鈮涸O(shè)定下,氣路原有氣壓差異影響了閥的響應(yīng)性能。同時(shí),當(dāng)設(shè)定壓力為0.1~0.4 MPa時(shí),系統(tǒng)整體響應(yīng)速度較快,當(dāng)壓力超過(guò)0.4 MPa后,系統(tǒng)響應(yīng)速度顯著變慢,反映在圖7e和圖7f上即可看出曲線斜率逐漸變小,原因在于隨著氣囊內(nèi)部壓力的增大,高壓空氣進(jìn)入的速度變慢,影響了裝置性能。為提高系統(tǒng)響應(yīng)速度,建議后續(xù)控制以0.4 MPa為初始設(shè)定壓力,對(duì)前期耕作處理的地塊,當(dāng)0.4 MPa以下氣囊壓力滿足其作業(yè)需求時(shí),系統(tǒng)控制響應(yīng)時(shí)間也可進(jìn)一步減小。
對(duì)數(shù)據(jù)進(jìn)行處理分析,結(jié)果如表1所示。可以看出,在調(diào)節(jié)范圍0.2~0.6 MPa內(nèi),左右區(qū)控制超調(diào)量均低于5.97%,且右區(qū)控制超調(diào)量不超過(guò)4.81%。對(duì)調(diào)節(jié)時(shí)間而言,其與設(shè)定氣壓大小正相關(guān),在設(shè)定氣壓0.1~0.4 MPa下,左區(qū)控制最長(zhǎng)為0.30 s,右區(qū)控制最長(zhǎng)為0.35 s,當(dāng)氣壓超過(guò)0.4 MPa,左區(qū)控制為1.25~2.30 s,右區(qū)控制為1.25~2.25 s,由于傳感器采樣最小時(shí)間間隔為0.05 s,默認(rèn)左右區(qū)控制調(diào)節(jié)時(shí)間一致,即分區(qū)控制下系統(tǒng)整體響應(yīng)時(shí)間不超過(guò)2.30 s,據(jù)此設(shè)定程序控制間隔為3 s。
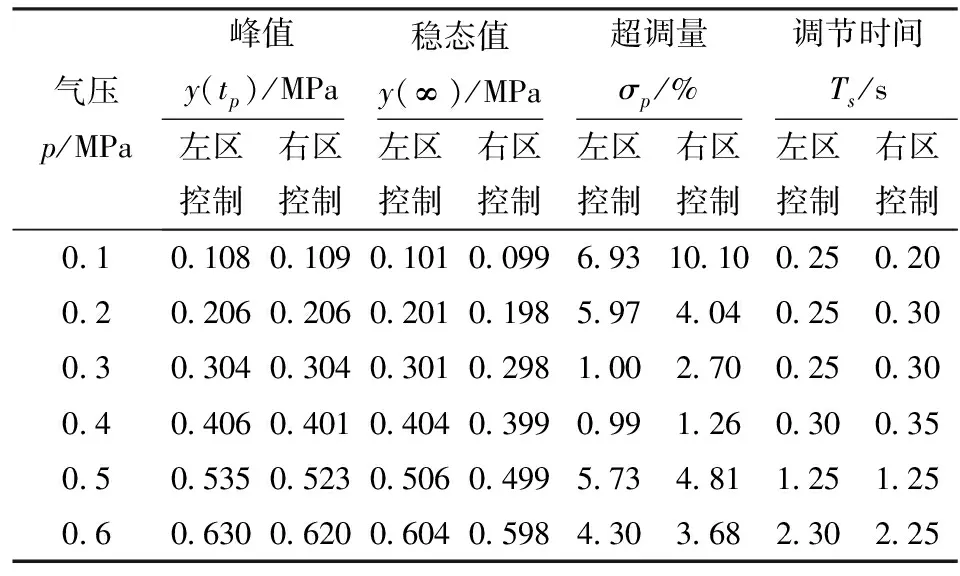
表1 不同階躍壓力下分區(qū)控制系統(tǒng)響應(yīng)試驗(yàn)結(jié)果Tab.1 Response results of section control system under different step pressures
不同分區(qū)控制行數(shù)下系統(tǒng)響應(yīng)測(cè)試結(jié)果如圖8所示。在0.6 MPa階躍氣壓調(diào)節(jié)下,對(duì)左右區(qū)控制而言,隨著控制行數(shù)的增加,其調(diào)節(jié)時(shí)間均變大。當(dāng)左右區(qū)控制行數(shù)不等時(shí),控制行數(shù)越多,其響應(yīng)調(diào)節(jié)時(shí)間越長(zhǎng),且在0.4 MPa壓力之前兩者區(qū)別不大(圖8b、8d);當(dāng)左右區(qū)控制行數(shù)相同時(shí),左右區(qū)控制調(diào)節(jié)時(shí)間基本相等(圖8a、8c、7f)。
分析表2數(shù)據(jù)發(fā)現(xiàn),在左右區(qū)分別控制單個(gè)播種行的情況下,其調(diào)節(jié)時(shí)間最小為0.75 s,而隨控制行數(shù)的增加,調(diào)節(jié)時(shí)間最長(zhǎng)為2.35 s,因此,當(dāng)播種機(jī)單體行較多時(shí),為提高響應(yīng)速度,可在現(xiàn)有系統(tǒng)基礎(chǔ)上通過(guò)增加電氣比例閥以實(shí)現(xiàn)各播種行的單獨(dú)控制。對(duì)6行播種機(jī)而言,綜合考慮硬件成本和地塊土壤區(qū)間差異下的控制精度需求,本系統(tǒng)選擇3行為一區(qū)域的分區(qū)控制方式,當(dāng)播種機(jī)行數(shù)大于6時(shí),可根據(jù)實(shí)際單體行數(shù)來(lái)配套增加電氣比例閥個(gè)數(shù)。同時(shí),在區(qū)域控制行數(shù)不變的情況下,相鄰區(qū)域控制行數(shù)的增加也會(huì)造成調(diào)節(jié)時(shí)間變大,如同樣2行控制下的左區(qū),隨著右區(qū)控制行數(shù)從1行變?yōu)?行,其調(diào)節(jié)時(shí)間也從1.40 s變?yōu)?.75 s,原因在于管路氣量的區(qū)域分配延緩了系統(tǒng)響應(yīng)速度。
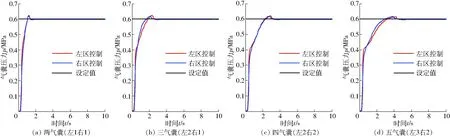
圖8 不同分區(qū)控制方式下系統(tǒng)響應(yīng)曲線Fig.8 System response curves in different section control modes

表2 不同分區(qū)控制方式下系統(tǒng)響應(yīng)試驗(yàn)結(jié)果Tab.2 System response results in different section control modes
4 田間性能試驗(yàn)
4.1 試驗(yàn)裝置和試驗(yàn)方法
如圖9所示,為檢驗(yàn)系統(tǒng)實(shí)際工作性能,于2019年12月在河北省石家莊市欒城區(qū)北留營(yíng)村進(jìn)行田間試驗(yàn)。試驗(yàn)地塊長(zhǎng)為220 m、寬為12 m,試驗(yàn)裝置為搭載本文設(shè)計(jì)系統(tǒng)的2BFQ-6型氣力精密播種機(jī)(河北中友機(jī)電設(shè)備有限公司),根據(jù)其作業(yè)幅寬將試驗(yàn)地塊分成3個(gè)小區(qū),單個(gè)小區(qū)長(zhǎng)為220 m、寬為4 m,并預(yù)留每個(gè)小區(qū)地頭地尾各10 m,方便拖拉機(jī)轉(zhuǎn)向和試驗(yàn)前裝置測(cè)試校正。考慮到土壤凍結(jié)對(duì)試驗(yàn)結(jié)果的影響,試驗(yàn)前對(duì)地塊進(jìn)行淺旋作業(yè)以創(chuàng)造適宜種床環(huán)境,同時(shí),取下播種機(jī)單體覆土輪以減小覆土作業(yè)對(duì)限深輪壓實(shí)地表和開溝深度的影響,保證后續(xù)播種下壓力和深度測(cè)量的準(zhǔn)確性。

圖9 系統(tǒng)田間試驗(yàn)Fig.9 Field test of control system
為比較不同調(diào)節(jié)方式的下壓力和播深調(diào)節(jié)效果,對(duì)播種機(jī)單體行設(shè)置不同控制方式,其中,第1、3、4、6行為主動(dòng)氣囊式,第2行為被動(dòng)彈簧式,第5行為自重調(diào)節(jié),即除單體自重外無(wú)外部下壓力作用。同時(shí),為比較不同設(shè)定下壓力對(duì)播種質(zhì)量影響,串聯(lián)第1、3行氣囊為左區(qū)控制,第4、6行為右區(qū)控制,并設(shè)置左區(qū)目標(biāo)下壓力為600 N,右區(qū)目標(biāo)下壓力為300 N,調(diào)節(jié)閾值為100 N。此外,作業(yè)前對(duì)3個(gè)小區(qū)分別調(diào)節(jié)播種深度為25、50、75 mm左右,在保證6行單體全部達(dá)到初始設(shè)定深度情況下,通過(guò)軟件界面校正下壓力測(cè)量模型。試驗(yàn)過(guò)程中,保持機(jī)具速度8 km/h左右,下壓力控制間隔時(shí)間為3 s。
4.1.1土壤壓實(shí)效果
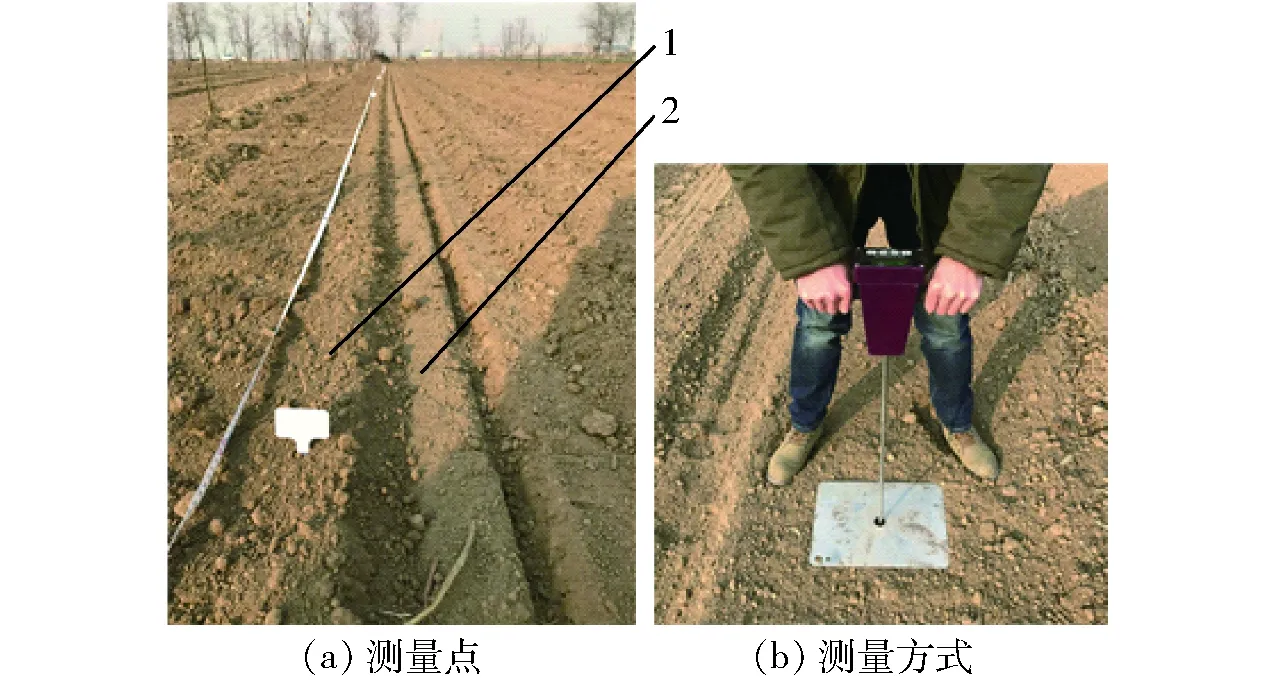
圖10 田間土壤緊實(shí)度測(cè)量Fig.10 Field measurement of soil compaction1.原始地表 2.限深輪胎面壓實(shí)處
由于實(shí)際作業(yè)過(guò)程中地表所受壓力不易測(cè)量,試驗(yàn)采用FieldScout SC900型土壤緊實(shí)度儀測(cè)量壓實(shí)土壤緊實(shí)度來(lái)表征下壓力,其可自動(dòng)獲取測(cè)量點(diǎn)地表深度和緊實(shí)度,對(duì)應(yīng)分辨率分別為2.5 cm和35 kPa。首先在3個(gè)不同播深小區(qū)選取50 m穩(wěn)定作業(yè)長(zhǎng)度,間隔10 m測(cè)量各單體行限深輪胎面壓實(shí)處和相鄰地表土壤緊實(shí)度,其中,緊實(shí)度測(cè)量深度范圍為0~10 cm,并根據(jù)儀器分辨率間隔2.5 cm記錄堅(jiān)實(shí)度(圖10)。然后,以原始地表和限深輪胎面壓實(shí)處對(duì)應(yīng)深度緊實(shí)度差值作為測(cè)量點(diǎn)下壓力實(shí)際作用緊實(shí)度。考慮到土壤區(qū)間差異性,以各單體行6處測(cè)量點(diǎn)均值作為單體行緊實(shí)度。最后,根據(jù)各單體行緊實(shí)度和不同下壓力作用方式對(duì)應(yīng)播種行范圍來(lái)計(jì)算相應(yīng)方式下土壤緊實(shí)度,即左區(qū)控制緊實(shí)度為第1、3行平均值,右區(qū)控制緊實(shí)度為第4、6行平均值,機(jī)械調(diào)節(jié)和自重調(diào)節(jié)分別為第2行和第5行緊實(shí)度。
4.1.2下壓力控制效果
由于土壤緊實(shí)度的測(cè)量受土壤物化特性影響較大,為更好評(píng)價(jià)系統(tǒng)下壓力控制效果,通過(guò)軟件控制程序按照20 Hz采樣頻率存儲(chǔ)播種機(jī)各單體行實(shí)時(shí)下壓力,并選取中間段90 s數(shù)據(jù)進(jìn)行處理。同上,對(duì)于左右區(qū)控制方式,取區(qū)內(nèi)各播種行平均值作為實(shí)時(shí)下壓力,并計(jì)算不同播深和控制方式作用時(shí)下壓力控制效果,其計(jì)算公式為
(6)
(7)
(8)
(9)
式中η1——播種下壓力合格率,%
n1——閾值范圍內(nèi)播種下壓力個(gè)數(shù)
N1——播種下壓力測(cè)量點(diǎn)總數(shù)
Fi——播種下壓力測(cè)量值,N
SF——播種下壓力標(biāo)準(zhǔn)差,N
VF——播種下壓力變異系數(shù),%
4.1.3播深控制效果
為評(píng)價(jià)不同下壓力作用方式下播深控制效果,試驗(yàn)通過(guò)播深測(cè)量裝置實(shí)時(shí)測(cè)量3種設(shè)定播深下各單體行實(shí)時(shí)播種深度,同樣選取90 s測(cè)量數(shù)據(jù),并參照農(nóng)業(yè)行業(yè)標(biāo)準(zhǔn)NY/T 1768—2009《免耕播種機(jī)質(zhì)量評(píng)價(jià)技術(shù)規(guī)范》對(duì)播深相關(guān)參數(shù)進(jìn)行評(píng)價(jià),各參數(shù)計(jì)算公式為
(10)
(11)
(12)
(13)
式中η2——播深合格率,%
n2——播深合格數(shù)
N2——播深測(cè)量點(diǎn)總數(shù)

hi——播深測(cè)量值,mm
Sh——播深標(biāo)準(zhǔn)差,mm
Vh——播深變異系數(shù),%
4.2 結(jié)果分析
4.2.1土壤實(shí)際壓實(shí)效果
對(duì)田間緊實(shí)度測(cè)量數(shù)據(jù)進(jìn)行處理,得到如圖11所示不同控制方式在不同設(shè)定播深下土壤緊實(shí)度結(jié)果。可以看出,不同控制方式均提高了土壤緊實(shí)度,實(shí)現(xiàn)了種溝壓實(shí)的目標(biāo)。除自重調(diào)節(jié)方式外,在其他3種方式作用下,相同地表深度的土壤緊實(shí)度隨著設(shè)定播深的增加呈一定減小趨勢(shì),這是由于單體對(duì)地作用力主要用于開溝和限深鎮(zhèn)壓,隨著播深的增加,開溝器開溝阻力增大,進(jìn)而造成單體對(duì)地作用力的再分配,在單體對(duì)地作用力無(wú)法獲得及時(shí)補(bǔ)償?shù)那闆r下,開溝壓力的增大勢(shì)必帶來(lái)限深輪對(duì)地下壓力的減小。相比之下,自重調(diào)節(jié)方式的土壤緊實(shí)度改變波動(dòng)較大,說(shuō)明外力作用可以提高單體對(duì)地壓實(shí)穩(wěn)定性。此外,在相同地表深度土壤緊實(shí)度改變量上,不同設(shè)定播深下的分區(qū)控制方式曲線數(shù)值較為集中(圖11a、11b),說(shuō)明主動(dòng)調(diào)節(jié)方式可以實(shí)現(xiàn)更為穩(wěn)定的限深輪對(duì)地下壓力,特別是右區(qū)控制。而在10 cm地表深度下,左區(qū)控制和機(jī)械調(diào)節(jié)方式作用的土壤緊實(shí)度在設(shè)定播深25 mm下改變較大,此時(shí)下壓力對(duì)緊實(shí)度的改變影響較小,其變化更多來(lái)源于土壤耕層物化特性的改變。
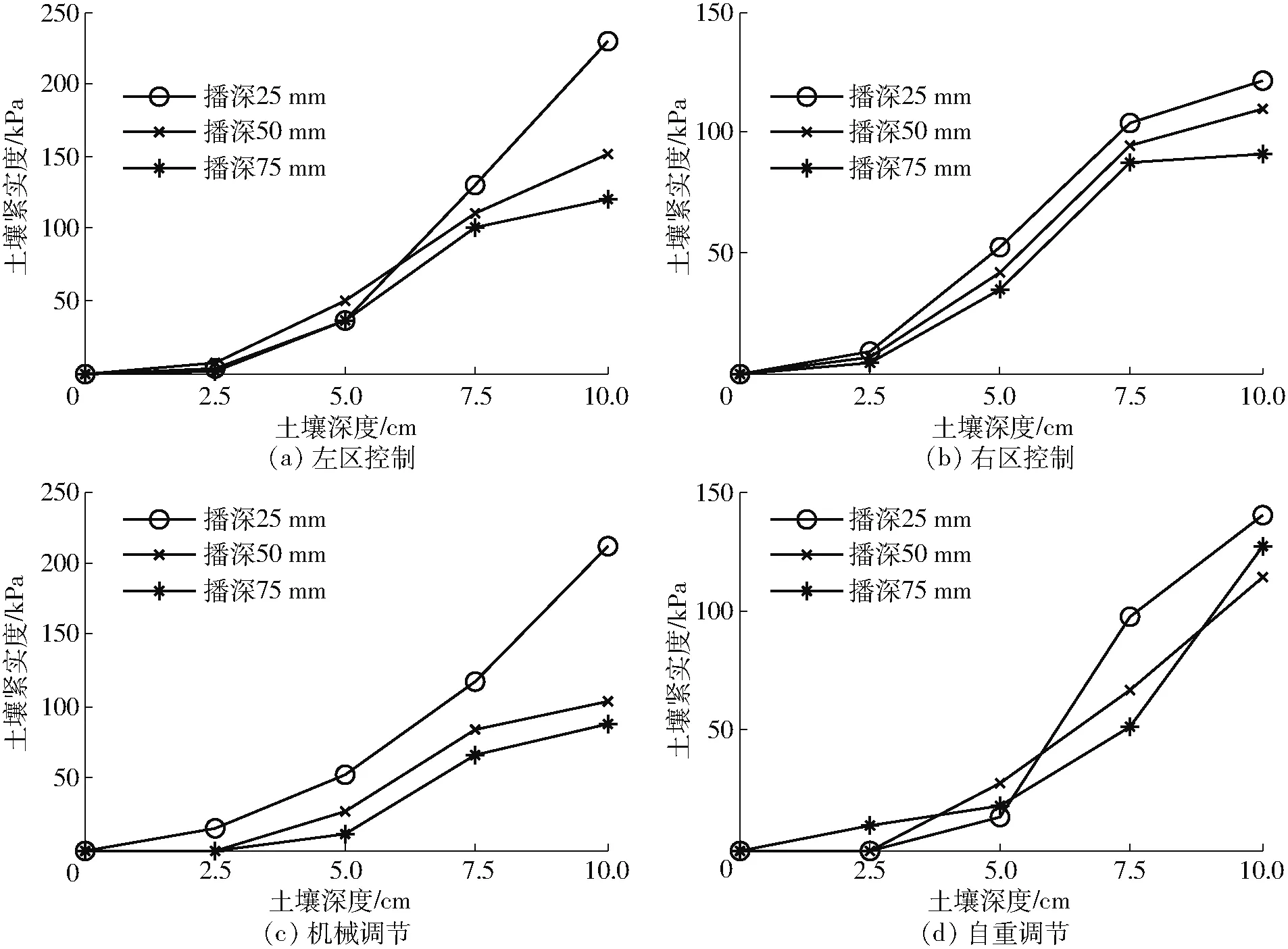
圖11 不同控制方式下土壤緊實(shí)度變化曲線Fig.11 Changes of soil compaction in different control modes
4.2.2播種下壓力控制效果

圖12 不同播深和控制方式下播種下壓力控制效果Fig.12 Effects of downforce control under different sowing depths and control modes
播種下壓力控制試驗(yàn)結(jié)果如圖12所示。整體來(lái)看,分區(qū)控制時(shí),不同設(shè)定播深下,右區(qū)控制下壓力基本處于200~400 N,滿足基本下壓力設(shè)定,而左區(qū)控制下壓力則隨播深變化而略有不同,如播深25 mm下變化范圍基本在500~700 N之間,播深50 mm下則處于400~600 N之間,播深75 mm下多處于300~500 N之間。從圖中看出,隨著播種深度的增加,左區(qū)控制下壓力變化范圍逐漸減小。同樣的變化也發(fā)生在機(jī)械調(diào)節(jié)和自重調(diào)節(jié)控制方式下,如機(jī)械調(diào)節(jié)下壓力變化范圍從播深25 mm的300~600 N變化為播深75 mm的0~200 N;自重調(diào)節(jié)下壓力變化范圍從播深25 mm的0~300 N變化為播深75 mm的0~100 N,即播種深度的增加造成限深輪處下壓力的減小,這也與圖11緊實(shí)度的變化趨勢(shì)相符。由此看出,在當(dāng)前作業(yè)地塊,裝置左區(qū)控制、機(jī)械和自重調(diào)節(jié)方式均已達(dá)到最大調(diào)節(jié)能力,在土壤阻力增大情況下無(wú)法提供更大的向下作用力來(lái)保證穩(wěn)定的限深輪對(duì)地下壓力,而右區(qū)控制設(shè)定下壓力則較為適合作業(yè)地塊土壤環(huán)境,即在播深變化下依然保持穩(wěn)定的播種下壓力。對(duì)設(shè)定播深50 mm和75 mm,單體自重調(diào)節(jié)方式下的播種下壓力出現(xiàn)間斷性為零現(xiàn)象,即限深輪擺臂脫離限深塊,播種深度低于設(shè)定值,說(shuō)明此時(shí)單純依靠單體自重調(diào)節(jié)無(wú)法保證較好的播深控制效果。
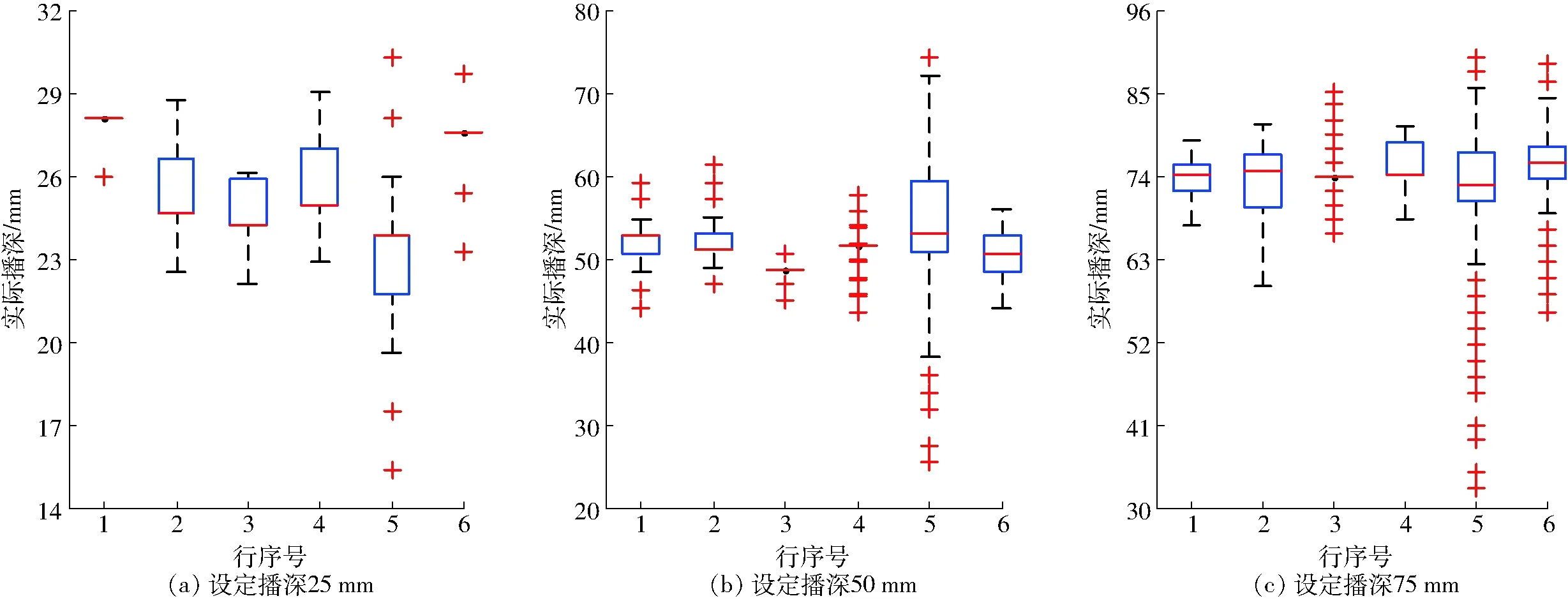
圖13 不同設(shè)定播深下單體行實(shí)際播深箱線圖Fig.13 Actual sowing depth boxplots of row units under different setting depths
數(shù)據(jù)統(tǒng)計(jì)結(jié)果如表3所示。從播種下壓力平均值看出,不同設(shè)定播深下,右區(qū)控制方式的播種下壓力能夠始終保持在300 N左右,設(shè)定閾值范圍內(nèi)合格率不小于95.78%,下壓力變異系數(shù)變化較小,處于14.11%~17.32%,而左區(qū)控制下壓力變異系數(shù)雖不超過(guò)14.13%,但其合格率隨播深增加而顯著減小,最小僅為0.39%,無(wú)法滿足穩(wěn)定下壓力的播種要求。
對(duì)無(wú)下壓力設(shè)定值的機(jī)械調(diào)節(jié)和自重調(diào)節(jié)方式而言,其下壓力變異系數(shù)隨播深改變而變化較大,特別是自重調(diào)節(jié)方式下從播深25 mm的42.91%增加到播深75 mm的385.11%,而機(jī)械調(diào)節(jié)方式從12.11%增大至83.72%。再次說(shuō)明僅依靠單體自重?zé)o法實(shí)現(xiàn)穩(wěn)定的播種下壓力;機(jī)械調(diào)節(jié)方式在低播深下可保持穩(wěn)定播種下壓力,而高播深下采用主動(dòng)下壓力調(diào)節(jié)方式可提高播種下壓力穩(wěn)定性,且適宜的下壓力設(shè)置能保證不同播深下穩(wěn)定的播種下壓力控制效果。
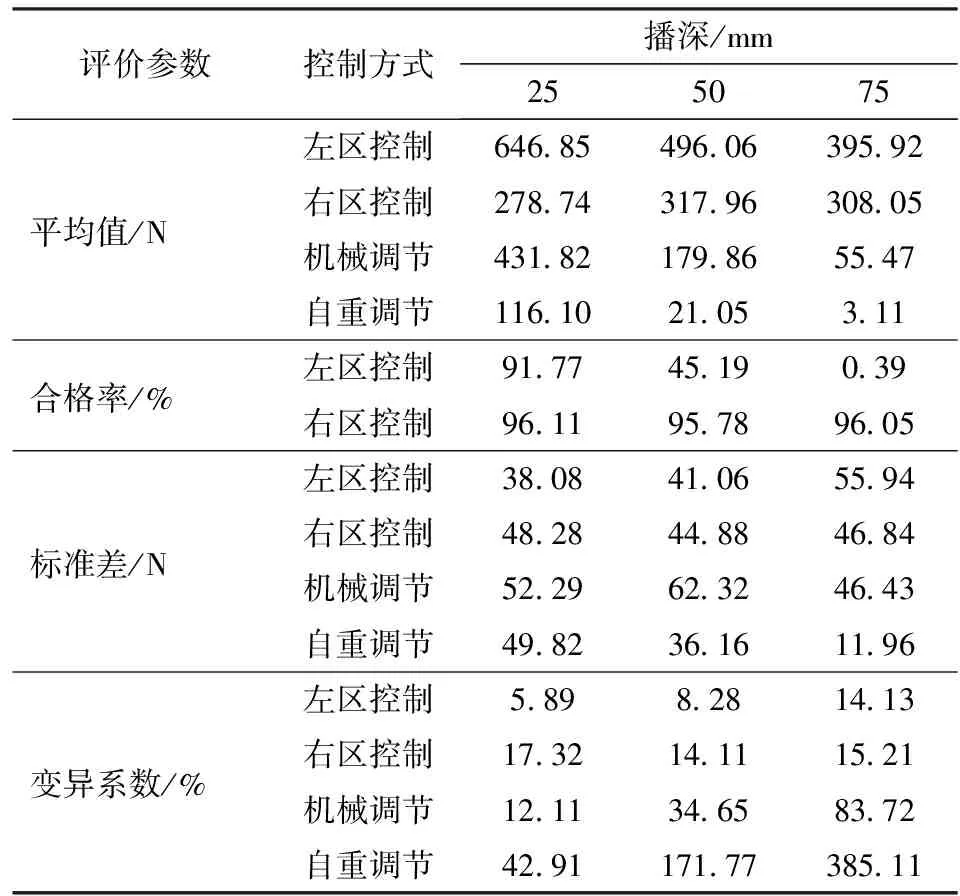
表3 播種下壓力控制田間試驗(yàn)結(jié)果Tab.3 Field experiment results of seeding downforce control
4.2.3播種深度控制效果
不同設(shè)定播深下,各單體行實(shí)際播深分布特征如圖13所示。在設(shè)定播深25 mm下,第1行和第6行數(shù)據(jù)較為集中,說(shuō)明這兩行播深穩(wěn)定性較好。同樣情況也出現(xiàn)在設(shè)定播深50 mm下的第3行和第4行,以及設(shè)定播深75 mm下的第3行,說(shuō)明分區(qū)控制方式可以獲得更好的播深穩(wěn)定性。整體看來(lái),25 mm設(shè)定播深時(shí),不同下壓力調(diào)節(jié)方式下實(shí)際播深波動(dòng)范圍差別較小,此時(shí)單體對(duì)地壓力均滿足基本開溝鎮(zhèn)壓需求;從圖中箱體大小變化可以看出,隨著播深增加,機(jī)械和分區(qū)控制方式下的實(shí)際播深比自重調(diào)節(jié)方式更為集中,且自重調(diào)節(jié)方式下存在較多播深異常情況,這也與上文播種下壓力間斷性為零現(xiàn)象相符,說(shuō)明此時(shí)限深輪處于浮動(dòng)狀態(tài),實(shí)際播深低于設(shè)定值。
進(jìn)一步計(jì)算不同行播深質(zhì)量參數(shù),對(duì)左右區(qū)取其行間參數(shù)平均值來(lái)評(píng)價(jià),計(jì)算得到結(jié)果如表4所示。從表中看出,不同控制方式下實(shí)際播種深度平均值與初始設(shè)定值略有差異,考慮到播深調(diào)節(jié)機(jī)構(gòu)因自身機(jī)械結(jié)構(gòu)特征無(wú)法達(dá)到較高的設(shè)定精度,本試驗(yàn)播深結(jié)果均達(dá)到初始作業(yè)目標(biāo)。在播深合格率評(píng)價(jià)選擇上,針對(duì)淺旋地試驗(yàn)條件,為更好表征不同控制方式下差異特征,選擇±5 mm為合格播深允許誤差。
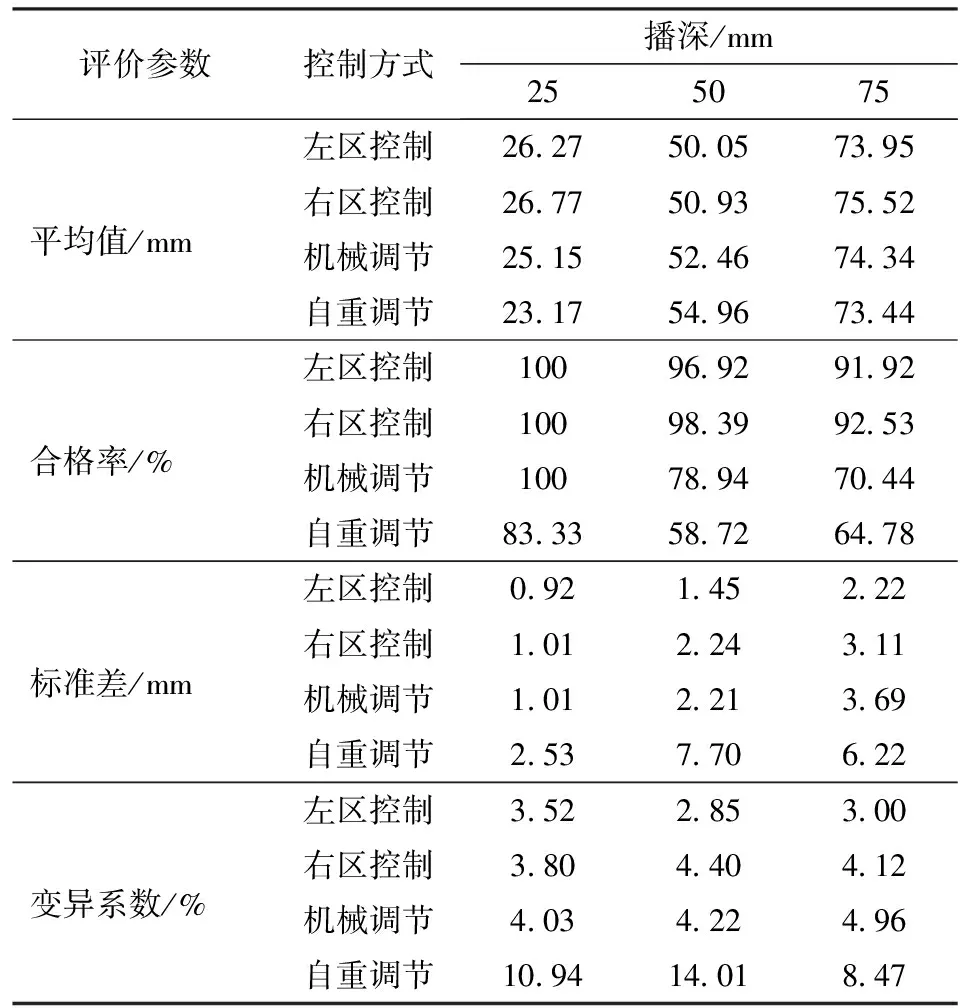
表4 播種深度控制田間試驗(yàn)結(jié)果Tab.4 Field experiment results of sowing depth control
從表4看出,隨著設(shè)定播深的增加,不同控制方式的播深合格率顯著降低,播深標(biāo)準(zhǔn)差逐漸增大,如自重調(diào)節(jié)方式播深合格率從25 mm播深的83.33%降到50 mm播深的58.72%,降低了24.61個(gè)百分點(diǎn),播深標(biāo)準(zhǔn)差從最小2.53 mm增加到最大7.70 mm。相比之下,當(dāng)設(shè)定播深從25 mm變?yōu)?5 mm時(shí),左區(qū)控制、右區(qū)控制和機(jī)械調(diào)節(jié)方式播深合格率分別降低了8.08、7.47、29.56個(gè)百分點(diǎn),達(dá)到最小91.92%、92.53%和70.44%,播深標(biāo)準(zhǔn)差分別從0.92、1.01、1.01 mm增加到最大2.22、3.11、3.69 mm。說(shuō)明外力作用下的分區(qū)控制和機(jī)械調(diào)節(jié)方式提高了播深合格率,降低了播深標(biāo)準(zhǔn)差,且分區(qū)控制方式比機(jī)械調(diào)節(jié)方式更有助于提高單體播深穩(wěn)定性。同樣結(jié)論也可從播深變異系數(shù)變化規(guī)律分析上獲得,如不同設(shè)定播深下,左右區(qū)控制方式、機(jī)械調(diào)節(jié)方式變異系數(shù)分別處于2.85%~3.52%、3.80%~4.40%和4.03%~4.96%之間,而自重調(diào)節(jié)方式變異系數(shù)則處于8.47%~14.01%之間。對(duì)比左右區(qū)控制方式結(jié)果發(fā)現(xiàn),較大下壓力可降低播深變異系數(shù)和標(biāo)準(zhǔn)差。
5 結(jié)論
(1) 設(shè)計(jì)了一種多行播種機(jī)下壓力和播深CAN總線監(jiān)控與評(píng)價(jià)系統(tǒng),采用基于角度和軸銷傳感器的播深和下壓力測(cè)量裝置,利用GNSS傳感器采集播種機(jī)實(shí)時(shí)位置和速度信息,以ECU作為系統(tǒng)控制單元,對(duì)作業(yè)參數(shù)進(jìn)行監(jiān)測(cè)控制和質(zhì)量評(píng)價(jià),采用液壓驅(qū)動(dòng)和分區(qū)控制方式優(yōu)化設(shè)計(jì)了氣壓驅(qū)動(dòng)裝置,開發(fā)了基于CoDeSys編程環(huán)境的軟件界面和控制程序,實(shí)現(xiàn)了ECU與智能終端的CAN總線通信。
(2) 通過(guò)搭建的室內(nèi)試驗(yàn)臺(tái)完成了播深傳感器標(biāo)定和建模,建立了匹配不同設(shè)定播深的下壓力測(cè)量校正模型。對(duì)多行播種機(jī)分區(qū)控制響應(yīng)測(cè)試表明,在氣囊調(diào)節(jié)范圍(0.2~0.6 MPa)內(nèi),分區(qū)控制方式超調(diào)量低于5.97%;系統(tǒng)響應(yīng)調(diào)節(jié)時(shí)間隨控制行數(shù)和設(shè)定氣壓增大而增大,當(dāng)6行播種機(jī)設(shè)定氣壓不大于0.4 MPa時(shí),其調(diào)節(jié)時(shí)間最長(zhǎng)不超過(guò)0.35 s,當(dāng)設(shè)定氣壓為0.4~0.6 MPa,響應(yīng)時(shí)間顯著增大,最長(zhǎng)達(dá)2.35 s。
(3) 在不同下壓力控制方式和設(shè)定播深下進(jìn)行了田間性能試驗(yàn)。土壤壓實(shí)和下壓力控制效果試驗(yàn)表明,相比自重調(diào)節(jié)和機(jī)械調(diào)節(jié),主動(dòng)分區(qū)控制方式可實(shí)現(xiàn)更為穩(wěn)定的土壤緊實(shí)度,且在淺旋地塊環(huán)境下,右區(qū)控制方式對(duì)不同設(shè)定播深的下壓力控制效果最佳,其合格率不小于95.78%。播深控制效果試驗(yàn)表明,隨著設(shè)定播深的增大,播深控制合格率顯著降低,標(biāo)準(zhǔn)差逐漸增大。在設(shè)定播深25~75 mm范圍內(nèi),左區(qū)控制、右區(qū)控制、機(jī)械調(diào)節(jié)和自重調(diào)節(jié)對(duì)應(yīng)的最小播深合格率分別為91.92%、92.53%、70.44%和58.72%,對(duì)應(yīng)的最大標(biāo)準(zhǔn)差分別為2.22、3.11、3.69、7.70 mm,對(duì)應(yīng)的最大變異系數(shù)分別為3.52%、4.40%、4.96%和14.01%,即相比機(jī)械調(diào)節(jié)和自重調(diào)節(jié),分區(qū)控制方式更有助于提高單體播深穩(wěn)定性。
猜你喜歡
新作文·小學(xué)低年級(jí)版(2021年9期)2021-11-27 07:57:46
學(xué)生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
故事大王(2016年7期)2016-09-22 17:30:08
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
兒童故事畫報(bào)(2013年3期)2013-06-24 05:40:30