高柔彈性電子皮膚壓力觸覺傳感器的研究
2020-06-24 02:48:46周建輝曹建國(guó)程春福尹海斌
哈爾濱工業(yè)大學(xué)學(xué)報(bào) 2020年7期
周建輝, 曹建國(guó), 程春福, 尹海斌, 余 寧, 范 陽(yáng)
(1.北京科技大學(xué) 機(jī)械工程學(xué)院,北京 100083;2.華北理工大學(xué) 遷安學(xué)院,河北 唐山 064400;3.北京科技大學(xué) 人工智能研究院,北京 100083;4.北京科技大學(xué) 順德研究生院,廣東 佛山 528399;5.武漢理工大學(xué) 機(jī)電工程學(xué)院,武漢 430070)
智能化機(jī)器人是當(dāng)今國(guó)際學(xué)術(shù)研究的熱點(diǎn)問題之一,而傳感器是機(jī)器人實(shí)現(xiàn)智能化的先決條件. 研究開發(fā)可用于機(jī)器人等復(fù)雜載體表面的壓力觸覺傳感器是非常迫切也是最具挑戰(zhàn)性的,這種傳感器在醫(yī)療健康、智能制造以及家居生活等領(lǐng)域具有廣泛的應(yīng)用前景[1-7].
觸覺傳感器的功能類似于人類皮膚的功能,可感知外界環(huán)境的各種信息,有利于機(jī)器人與人類或接觸物體的安全交互[8-10]. 相對(duì)于視覺、聽覺、味覺等,觸覺信息的感知更為復(fù)雜,盡管國(guó)際上早在20世紀(jì)70年代起,就已開始對(duì)電子皮膚觸覺傳感器進(jìn)行探索與研究,但進(jìn)展依舊緩慢[11]. 現(xiàn)有的觸覺傳感器中,具有較高拉伸能力的大多為應(yīng)變傳感器,以測(cè)量應(yīng)變?yōu)橹鳎r少有兼具高拉伸性能及接觸壓力測(cè)量的觸覺傳感器. 早期研制的壓力觸覺傳感器大部分采用硅為主要材料[12],通過微機(jī)電系統(tǒng)(MEMS)技術(shù)實(shí)現(xiàn)微小陣列的制作,其優(yōu)點(diǎn)是體積小,成本低,但這種硅微型壓力傳感器難以滿足大面積覆蓋的電子皮膚觸覺傳感器需要的柔性化和可擴(kuò)展性等要求. 2004年,東京大學(xué)Someya課題組基于有機(jī)場(chǎng)效應(yīng)晶體管(OFETs)開發(fā)了可實(shí)現(xiàn)壓力測(cè)量的柔性壓阻式觸覺傳感器[13]. 除電極之外,此傳感器的所有部件都由軟性材料制作而成,在保證較低成本及良好可擴(kuò)展性的基礎(chǔ)上,實(shí)現(xiàn)了柔性化;2005年,該課題組引入“漁網(wǎng)”結(jié)構(gòu)[14],進(jìn)一步使傳感器的拉伸率提高到25%;但依靠“漁網(wǎng)”結(jié)構(gòu)實(shí)現(xiàn)的彈性在附著于活動(dòng)關(guān)節(jié)時(shí)將會(huì)消失,不能適應(yīng)動(dòng)態(tài)測(cè)量. 2010年,加州大學(xué)伯克利分校Javey課題組的Takei等[15]用接觸印刷法,將平行的半導(dǎo)體(Ge/Si)納米線陣列附著于柔性的聚酰亞胺基底材料,制作了基于場(chǎng)效應(yīng)晶體管的壓力測(cè)量電子皮膚柔性觸覺傳感器,能夠檢測(cè)動(dòng)態(tài)壓力且在超過2 000次的彎曲半徑為2.5 mm的彎曲試驗(yàn)中保持性能穩(wěn)定,但難以實(shí)現(xiàn)可擴(kuò)展性且缺乏彈性. 2011年,美國(guó)斯坦福大學(xué)將碳納米管噴涂于PDMS基底,制作了具有良好透明度和彈性的電容式電子皮膚陣列觸覺傳感器[16],附著或埋于彈性材料中的蜷曲的碳納米管以及由其形成的網(wǎng)狀結(jié)構(gòu)使宏觀的導(dǎo)線能夠隨著彈性材料的拉伸而伸長(zhǎng)同時(shí)保證導(dǎo)電性,從而實(shí)現(xiàn)了整體結(jié)構(gòu)的彈性. 此陣列傳感器既能檢測(cè)壓力又能檢測(cè)拉力,但是由于擠壓和拉伸都會(huì)明顯改變電容信號(hào),所以只宜用于單獨(dú)測(cè)量應(yīng)變或者拉伸率不變的情況下測(cè)量壓力. 2013年,北京科技大學(xué)曹建國(guó)課題組[17-18]充分利用銀納米線優(yōu)良的導(dǎo)電性和納米尺寸效應(yīng),提出了一種基于“多孔聚二甲基硅氧烷(PDMS)”和AgNWs/PDMS納米復(fù)合材料電極的新型多層“三明治”式壓力傳感器陣列結(jié)構(gòu). 這種電子皮膚觸覺傳感器的柔彈性得到了提高,并且可擴(kuò)展性好,性能穩(wěn)定[19]. 2018年,中科院北京納米能源與系統(tǒng)研究所的王中林與張弛課題組利用具有光柵結(jié)構(gòu)的金屬薄膜制作了一款彈性摩擦電光子智能皮膚,可實(shí)現(xiàn)垂直壓力的測(cè)量及手勢(shì)的感測(cè)[20];同年,王中林課題組又設(shè)計(jì)制作了由100個(gè)傳感節(jié)點(diǎn)通過曲線形導(dǎo)線連接成的具有高彈性及順應(yīng)性的矩陣網(wǎng)絡(luò),可實(shí)現(xiàn)壓力、溫度等多功能測(cè)量[21]. 2019年,廈門大學(xué)Hou等[22]利用無(wú)水工藝合成的基于銀納米纖維/絲素蛋白的高柔彈性電極制作了可同時(shí)檢測(cè)壓力及應(yīng)變信號(hào)的柔性觸覺傳感器. 上述關(guān)于電子皮膚觸覺傳感器的研究已經(jīng)取得了重要進(jìn)展,本文在前人工作的基礎(chǔ)上,探討實(shí)現(xiàn)電子皮膚壓力觸覺傳感器高柔彈性的新方法,以擴(kuò)大電子皮膚觸覺傳感器的應(yīng)用范圍,提高其實(shí)用價(jià)值.
本文從材料的選取、結(jié)構(gòu)的優(yōu)化以及新型制作工藝等方面出發(fā),探索了高柔彈性電子皮膚觸覺傳感器的制作方法. 來自英國(guó)Cody課題組和美國(guó)佐治亞理工學(xué)院Bhattacharjee課題組的研究結(jié)果顯示,作為人體體表最富柔彈性的手腕部位的皮膚能夠在手腕彎曲時(shí)經(jīng)受最大20.4%的拉伸率,本文以超越人類皮膚柔彈性,使壓力觸覺傳感器達(dá)到30%拉伸率為目標(biāo),選用新型AgNWs/PDMS復(fù)合材料、基于半圓與圓形相結(jié)合的高柔彈性導(dǎo)電薄膜電極層及陣列式“多孔PDMS”的新型“三明治”式傳感器陣列結(jié)構(gòu),采用模具固化成型工藝制作了高柔彈性電子皮膚壓力觸覺傳感器,極大地提高了觸覺傳感器的柔彈性,并搭建了壓力觸覺傳感器測(cè)試系統(tǒng),測(cè)試了傳感器系統(tǒng)的性能.
1 傳感器的設(shè)計(jì)
1.1 傳感器的總體設(shè)計(jì)
在壓力測(cè)量方面,觸覺傳感器主要基于壓電式、電容式、壓阻式3種工作原理[1]. 其中,壓阻式壓力觸覺傳感器是基于壓阻效應(yīng)工作的,其主要特點(diǎn)是采用壓阻材料作為敏感材料. 當(dāng)受到外力作用時(shí),敏感材料會(huì)發(fā)生彈性變形,從而導(dǎo)致其電阻率發(fā)生變化,進(jìn)而導(dǎo)致材料的電阻發(fā)生改變. 通過檢測(cè)敏感材料的電阻變化,便可獲知外力的信息. 該類觸覺傳感器由于制作簡(jiǎn)單,成本低,動(dòng)態(tài)范圍寬,負(fù)載能力良好以及信號(hào)處理電路簡(jiǎn)單等優(yōu)點(diǎn),受到了研究人員的廣泛關(guān)注,因此,本文選擇基于壓阻原理來制作高柔彈性壓力觸覺傳感器[23-25].
壓阻式壓力觸覺傳感器通常采用電極層-中間傳感層-電極層的“三明治式”夾層結(jié)構(gòu),其傳感單元如圖1所示.
傳感單元的上、下兩層是連接外接引線的電極層,中間是具有壓阻特性的敏感材料,整個(gè)傳感單元的作用是將感受到的外界壓力轉(zhuǎn)換為電阻變化量,通過后續(xù)信號(hào)處理電路根據(jù)檢測(cè)到的電信號(hào)反求出所受壓力,從而達(dá)到壓力檢測(cè)的目的.
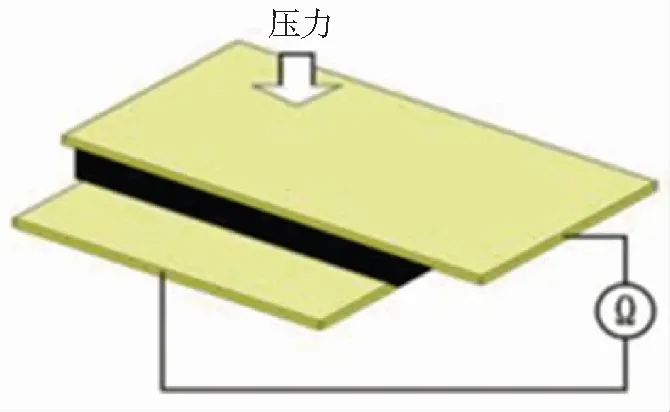
圖1 傳感單元示意Fig.1 Sensor unit
單個(gè)傳感單元檢測(cè)到的壓力信息非常有限,無(wú)法滿足大面積測(cè)量的需求,因此需要將傳感單元陣列化,以獲得足夠的壓力信息. 傳感單元陣列化的方式較多,最經(jīng)典的是采用行、列電極的結(jié)構(gòu)形式,將壓阻材料置于上、下垂直的兩組平行電極之間,行、列電極的每個(gè)交叉點(diǎn)與壓阻材料接觸形成圖2所示的傳感單元,大量排列有序的傳感單元就形成了傳感器陣列. 這種行、列電極的布置形式主要優(yōu)點(diǎn)在于可大大減少外接引線的數(shù)量,假設(shè)傳感陣列的行數(shù)為M,列數(shù)為N,那么這種布線方式可將2×M×N條引線減少為M+N條,引線的減少有利于提高傳感器的穩(wěn)定性和準(zhǔn)確性,節(jié)省空間,降低成本[19].

圖2 傳感器陣列的行、列電極結(jié)構(gòu)Fig.2 Row and column electrode structure of sensor array
傳感器陣列工作時(shí),傳感單元受到外部壓力,對(duì)應(yīng)的上、下電極層通過中間的壓阻材料導(dǎo)通,此時(shí)壓阻材料的電阻隨外部壓力的變化而改變,后續(xù)信號(hào)處理電路根據(jù)電阻大小計(jì)算出對(duì)應(yīng)傳感單元受力大小,根據(jù)傳感單元受力的位置信息,可進(jìn)一步得到接觸物體的輪廓信息. 在傳感陣列中單位面積內(nèi)傳感單元數(shù)量越多,即傳感陣列分辨率越高,獲得的物體輪廓信息越準(zhǔn)確.
1.2 壓力觸覺傳感器的高柔彈性方案
壓力觸覺傳感器要實(shí)現(xiàn)高柔彈性,可從傳感器的材料、結(jié)構(gòu)、制作工藝等方面出發(fā),改進(jìn)傳感器的制作方法,具體的柔彈性化方案如下.
1.2.1 材料
1)導(dǎo)線與電極材料. 傳統(tǒng)的導(dǎo)線主要是由半導(dǎo)體材料或者金屬及其化合物制作而成,但是這些材料柔性較差,不能直接用來制作高柔彈性導(dǎo)線,因此,研究人員提出了多種實(shí)現(xiàn)導(dǎo)線柔彈性化的方法.例如波狀超薄金屬[26-27],屈曲[28]或褶皺結(jié)構(gòu),以及螺旋彈簧布局[29]等方式,但這些柔彈性導(dǎo)線在制作工藝的復(fù)雜程度、穩(wěn)定性、粘附性等方面還存在一些不足. 目前,將金屬粉末、石墨、納米管/納米線等導(dǎo)電材料與彈性體混合得到的導(dǎo)電復(fù)合材料最受研究人員青睞.
本文選用銀納米線(AgNWs)導(dǎo)電填料與PDMS基底材料制作高柔彈性導(dǎo)線,得到的AgNWs/PDMS導(dǎo)電復(fù)合材料既保持了AgNWs優(yōu)良的導(dǎo)電性,又具備了薄膜狀PDMS極好的柔彈性,因此,AgNWs/PDMS導(dǎo)電復(fù)合材料是壓力觸覺傳感器實(shí)現(xiàn)高柔彈性的理想電極材料.
2)敏感材料. 壓阻式壓力觸覺傳感器是基于壓阻效應(yīng)制作的,其核心敏感材料應(yīng)是具有壓阻特性的壓阻材料. 壓阻橡膠是一種將炭黑、金屬粉末等導(dǎo)電材料與液態(tài)硅橡膠材料混合并固化加工而成的高分子復(fù)合材料,其導(dǎo)電能力介于導(dǎo)體與絕緣體之間,具有良好的壓阻特性,又繼承了橡膠材料的抗拉性、柔韌性及成型加工性,成為制作柔性壓力觸覺傳感器的重要敏感材料.
壓阻橡膠的壓阻特性與導(dǎo)電填料有關(guān),這里選用的導(dǎo)電填料為鎳粉,鎳粉具有導(dǎo)電性能優(yōu)良,硬度大,耐磨損,價(jià)格低廉等優(yōu)點(diǎn). 本文中的壓阻橡膠是由PDMS作為基體,鎳粉作為導(dǎo)電填料制作的,而鎳粉含量增加,會(huì)降低壓阻橡膠的柔韌性,因此通過試驗(yàn)確定了鎳粉與PDMS的配比為3.5∶1.0,此時(shí)得到的壓阻橡膠既具有良好的壓阻特性,又具有優(yōu)異的柔彈性,可作為高柔彈性壓力觸覺傳感器的敏感材料.
1.2.2 結(jié)構(gòu)
壓阻橡膠由于鎳粉的引入和其自身厚度的影響,其柔彈性比導(dǎo)電薄膜電極層差一些. 為了進(jìn)一步提高傳感器的柔彈性,將片狀壓阻橡膠剪裁成直徑3 mm的壓阻圓片,通過“多孔PDMS”固定各壓阻圓片的位置.
此外,根據(jù)相關(guān)研究可知[30-32],馬蹄形導(dǎo)線具有更好的柔彈性、導(dǎo)電性和穩(wěn)定性,并且制作工藝簡(jiǎn)單,均一性好,是制作高柔彈性觸覺傳感陣列電極層的首選方案. 考慮到用于機(jī)器人壓力觸覺感知的傳感陣列需要較高的分辨率,所以選擇馬蹄形的極限情況,也就是半圓形作為導(dǎo)電薄膜電極層的基礎(chǔ)形狀.
1.2.3 制作工藝
采用模具固化成型法制作壓力觸覺傳感器,該方法可充分利用材料的液體狀態(tài)進(jìn)行傳感器各部分的制作. 一方面,通過模具固化成型法可制作出任意形狀的導(dǎo)線和電極,以增加傳感器的柔彈性;另一方面,利用PDMS液體狀態(tài)可以制作出足夠薄的電極或壓阻橡膠,以保證傳感器各部分均具有良好的柔彈性,并且液體狀態(tài)也有利于AgNWs或鎳粉材料與PDMS間的相互融合,當(dāng)融合度比較高時(shí),PDMS固化后的柔韌特性越好,從而使觸覺傳感器的柔彈性得到提高.
2 傳感器的制作
設(shè)計(jì)的電子皮膚壓力觸覺傳感器主要由上、下電極層及中間傳感層構(gòu)成,下面分別介紹其制作方法.
2.1 導(dǎo)電薄膜電極層的設(shè)計(jì)與制作
高柔彈性導(dǎo)線是電子皮膚觸覺傳感器實(shí)現(xiàn)高柔彈性的關(guān)鍵部件,這里選用基于銀納米線 (AgNWs) 和PDMS的導(dǎo)電復(fù)合材料制作高柔彈性導(dǎo)電薄膜電極層. 這種導(dǎo)電薄膜電極層不但要具有良好的導(dǎo)電性,還要能夠在拉伸和彎曲等不同工作條件下保持導(dǎo)電的穩(wěn)定性.
除了具有高柔彈性,設(shè)計(jì)導(dǎo)電薄膜電極層還要能夠和壓阻材料一起共同構(gòu)成觸覺傳感器的傳感單元,實(shí)現(xiàn)壓力的檢測(cè),因此將馬蹄形導(dǎo)線的形狀改進(jìn)為半圓與圓形相結(jié)合的形式. 該傳感陣列由平行導(dǎo)線組成,其形狀及具體的尺寸如圖3所示. 這種半圓與圓形相結(jié)合的導(dǎo)電薄膜電極層不但具有高柔彈性,而且可節(jié)約銀納米線的用量,達(dá)到節(jié)約成本的目的.
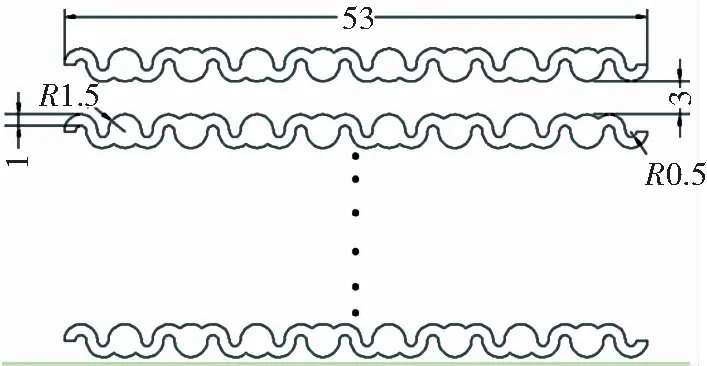
圖3 導(dǎo)電薄膜電極層的CAD圖(mm)Fig.3 CAD of conductive film electrode layer
半圓與圓形相結(jié)合的導(dǎo)電薄膜電極層在承受拉伸應(yīng)變時(shí),首先是來自曲線形狀的舒展,然后才是導(dǎo)電薄膜電極層的彈性變形,因此,在相同拉伸率(30%)條件下,本文所制作的基于半圓與圓形相結(jié)合的曲線形狀的導(dǎo)電薄膜電極層,其電阻值增長(zhǎng)率要明顯小于長(zhǎng)條形電極的電阻值增長(zhǎng)率,具有更好的導(dǎo)電穩(wěn)定性.
制作導(dǎo)電薄膜電極層時(shí)首先要按圖3尺寸用激光切割機(jī)切割PDMS模具. 導(dǎo)線的線寬為1 mm,半圓部分的內(nèi)半徑僅為0.5 mm,圓形部分的半徑為1.5 mm,單條導(dǎo)線的長(zhǎng)度為53 mm,相鄰導(dǎo)線之間的間隔為3 mm,整個(gè)單片電極層的總厚度不超過0.1 mm.
具體的制備過程如圖4所示:

圖4 導(dǎo)電薄膜電極層制備流程Fig.4 Preparation process of conductive film electrode layer
1)首先,將切割好的PDMS模具緊密地置于玻璃板上. 用針管吸取AgNWs溶液(10 mg / mL)滴入模具中.
2)待AgNWs充分干燥后,根據(jù)所需的厚度,重復(fù)1~2次以上滴液和干燥過程.
3)揭下PDMS模具,將預(yù)先配備好的液態(tài)PDMS(本劑與粘接劑的質(zhì)量比為10∶1)澆注于干燥的AgNWs陣列上. 通過固定厚度的玻璃墊片和另一個(gè)覆蓋其上的玻璃板可對(duì)薄膜的厚度進(jìn)行控制. 本文制作的導(dǎo)電薄膜電極層厚度僅為0.1 mm,將預(yù)先切割好的厚度0.1 mm的玻璃墊片置于澆注了液態(tài)PDMS的AgNWs導(dǎo)線陣列周圍,用另一玻璃板壓蓋,以保證整個(gè)薄膜的厚度為0.1 mm.
4)利用真空爐將液態(tài)PDMS內(nèi)的氣泡排凈,使整個(gè)結(jié)構(gòu)在65 ℃的加熱爐中固化12 h.
5)最后,從玻璃板上將導(dǎo)電薄膜緩慢揭下,便得到導(dǎo)電薄膜電極層.
2.2 中間傳感層的設(shè)計(jì)與制作
中間傳感層是由壓阻橡膠圓片嵌入多孔PDMS的圓孔制作組成. 壓阻橡膠[33]是高柔彈性壓力觸覺傳感器實(shí)現(xiàn)壓力檢測(cè)的核心部件,可將被測(cè)壓力轉(zhuǎn)化為電阻;多孔PDMS主要起到支撐和固定壓阻橡膠圓片的作用. 這樣的結(jié)構(gòu)可提高中間傳感層的柔彈性.
壓阻橡膠基于鎳粉和PDMS制作而成,二者的質(zhì)量比為3.5∶1.0,具體的制備過程見圖5.
1)首先將PDMS主劑和鎳粉以3.5∶1.0的質(zhì)量比進(jìn)行混合,用攪拌棒輕柔、緩慢地進(jìn)行攪拌,防止微米級(jí)鎳粉顆粒的表面受損.
2)待二者均勻混合后,將PDMS固化劑按照主劑∶固化劑=10∶1的質(zhì)量比進(jìn)行稱重,加入到混合物中繼續(xù)輕柔、緩慢地進(jìn)行攪拌.
3)待新的混合物中3種成分充分混合后,倒在清潔干凈的平板玻璃上,并放置于真空爐中1 h除氣泡.
4)氣泡清除后將混合物靜置于常溫環(huán)境,使其自然流動(dòng)至上表面光滑,此時(shí)將厚度0.8 mm的3個(gè)小玻璃墊片置于混合物周圍,并將另一塊清潔干凈的平板玻璃壓緊置于混合物及墊片正上方,目的是保證整片壓阻橡膠的厚度一致且內(nèi)部均勻.
5)最后將緊密固定的玻璃板-混合物-玻璃板整體放入加熱爐中,保持65 ℃加熱4 h,待混合物充分固化,將其緩慢揭下,壓阻橡膠即制備完成.

圖5 壓阻橡膠制備流程Fig.5 Preparation process of piezoresistive rubber
將壓阻橡膠剪裁成直徑3 mm的壓阻圓片. 這些壓阻圓片應(yīng)處于行、列電極之間的交叉位置. 為了保證測(cè)量的準(zhǔn)確性,引入陣列式“多孔PDMS”的結(jié)構(gòu)對(duì)壓阻圓片的位置進(jìn)行固定,“多孔PDMS”各圓孔的直徑為3 mm,相鄰間距為3 mm,其制作方法非常簡(jiǎn)單,將制作好的PDMS薄膜用激光切割機(jī)按圖紙進(jìn)行切割即可.
將壓阻圓片放置于多孔PDMS各空隙處,就組成了壓阻式壓力觸覺傳感器的中間傳感層,如圖6所示. PDMS薄膜與壓阻橡膠均具有良好的柔彈性,此外PDMS薄膜還采用了多孔的形狀,進(jìn)一步增加了中間傳感層的柔性;因此,在材料的選擇和結(jié)構(gòu)的設(shè)計(jì)方面都使中間傳感層具有良好的柔彈性. 另外,由于在傳感陣列中壓阻橡膠之間相互獨(dú)立,工作時(shí)各壓阻圓片間的電阻串?dāng)_問題基本得到解決,保證傳感器測(cè)試結(jié)果的準(zhǔn)確性和可靠性. 這種中間傳感層適合應(yīng)用于機(jī)器人高柔彈性電子皮膚壓力觸覺傳感器.

圖6 傳感器的中間傳感層Fig.6 Intermediate sensing layer of sensor
2.3 高柔彈性壓力觸覺傳感器的制作
本文設(shè)計(jì)的高柔彈性壓力觸覺傳感器的整體結(jié)構(gòu)如圖7所示,分別由導(dǎo)電薄膜上、下電極層、壓阻橡膠、多孔PDMS薄膜組成.

圖7 高柔彈性壓力觸覺傳感器結(jié)構(gòu)示意
Fig.7 Structure of highly flexible and stretchable pressure tactile sensor
該傳感器上、下電極層各有8條平行的導(dǎo)線陣列,采用行、列電極的配置形式;壓阻橡膠剪裁成直徑3 mm的壓阻圓片,與上、下電極層的交叉點(diǎn)一起構(gòu)成了64個(gè)傳感單元;再與多孔PDMS結(jié)合共同構(gòu)成觸覺傳感器陣列. 當(dāng)上、下電極層、壓阻橡膠及多孔PDMS全部制作完成以后,需要對(duì)整個(gè)傳感器結(jié)構(gòu)進(jìn)行封裝,具體步驟如下.
1)首先將一片導(dǎo)電薄膜(下電極層)平鋪置于平板玻璃上,導(dǎo)電一側(cè)朝上,由于導(dǎo)電薄膜非常薄,可自然粘附于平板玻璃上,位置基本固定. 用導(dǎo)電銀膠和銅片或銅絲分別將8條導(dǎo)線的一端引出,待銀膠充分干燥,銅片或銅絲固定好后,將少量液態(tài)PDMS涂抹于導(dǎo)電薄膜的四周及導(dǎo)線間的空隙.
2)將64個(gè)壓阻圓片嵌入多孔PDMS得到的中間傳感層粘貼于下電極層上,保證壓阻圓片與電極層上AgNWs圓形部分完全重合.
3)將另一片導(dǎo)電薄膜(上電極層)平鋪置于另一塊平板玻璃上,導(dǎo)電一側(cè)朝上,用導(dǎo)電銀膠和銅片或銅絲分別將8條導(dǎo)線的一端引出,待銀膠充分干燥,銅片或銅絲固定好后,將少量液態(tài)PDMS涂抹于導(dǎo)電薄膜的四周及導(dǎo)線間的空隙.
4)將上電極層從玻璃板上揭下,粘貼于步驟2)中制作的下電極層及中間傳感層上,導(dǎo)電一側(cè)向下,并保證上、下電極層的導(dǎo)線相互垂直,同時(shí)導(dǎo)線交叉處分別與64個(gè)壓阻圓片重合.
5)將另一塊平板玻璃壓在整個(gè)傳感器之上,并用膠條進(jìn)行固定,放入加熱爐中,在65 ℃加熱固化4 h,冷卻后去掉壓蓋的玻璃板,將整個(gè)結(jié)構(gòu)揭下,便得到了封裝好的高柔彈性壓力觸覺傳感器,如圖8所示.

圖8 高柔彈性壓力觸覺傳感器實(shí)物
Fig.8 Image of highly flexible and stretchable pressure tactile sensor
這種電子皮膚觸覺傳感器制作工藝簡(jiǎn)單,且單片8×8陣列的電子皮膚觸覺傳感器的制作成本低.
3 傳感器測(cè)試系統(tǒng)的搭建
本文所設(shè)計(jì)的壓力觸覺傳感器測(cè)試系統(tǒng)的工作原理如圖9所示,這里壓力觸覺傳感器是由8×8個(gè)傳感單元構(gòu)成的壓力傳感陣列,其8條行引出線分別接入到行掃描電路的8個(gè)接口,8條列引出線分別通過信號(hào)調(diào)理電路接入到數(shù)據(jù)采集卡輸入端的8個(gè)接口,數(shù)據(jù)采集卡的輸出端通過USB接口與計(jì)算機(jī)相連,將采集到的數(shù)據(jù)信息傳輸給計(jì)算機(jī)處理、存儲(chǔ)和顯示[19]. 工作時(shí),壓力觸覺傳感器測(cè)試系統(tǒng)通過數(shù)據(jù)采集卡發(fā)出指令給微控制器,微控制器通過八選一模擬開關(guān)控制行掃描電路的通斷,同時(shí)數(shù)據(jù)采集卡采用逐行掃描的方式采集掃描電路的時(shí)序信號(hào)并傳輸給計(jì)算機(jī),最后在計(jì)算機(jī)顯示器上通過圖形用戶界面(GUI)顯示出觸覺傳感器受到的壓力分布情況和接觸部位的輪廓,壓力大小通過不同顏色進(jìn)行區(qū)分.
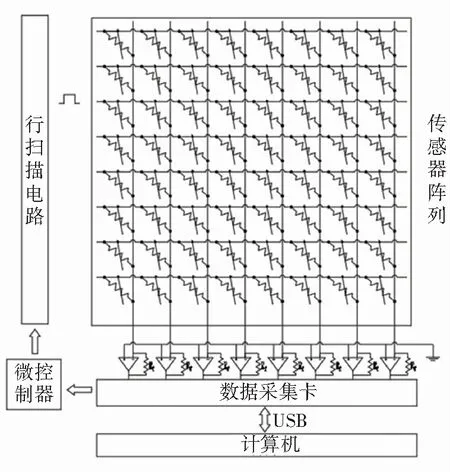
圖9 傳感器測(cè)試系統(tǒng)工作原理Fig.9 Working principle of sensor test system
4 壓力觸覺傳感器性能測(cè)試
4.1 觸覺傳感器高柔彈性的展示
本課題制作的傳感器整體厚度僅為1 mm,采用8×8陣列,共計(jì)64個(gè)傳感單元. 整個(gè)傳感器均采用了具有高柔彈性的導(dǎo)電材料及敏感材料,且中間傳感層引入了多孔的結(jié)構(gòu)設(shè)計(jì),因此傳感器的柔彈性非常好,可覆蓋于機(jī)器人等復(fù)雜的三維載體表面,如圖10所示. ABB機(jī)器人手臂(b)、(c)兩個(gè)部位均為可展曲面,電子皮膚觸覺傳感器可在表面上緊密貼合,說明傳感器具有良好的柔性;機(jī)器人手臂(a)部位為非可展曲面,表面的主曲率有變化,電子皮膚觸覺傳感器與該表面的緊密貼合說明傳感器的柔性和彈性都比較好.

圖10 觸覺傳感器緊密貼合于三維載體表面Fig.10 Tactile sensor closely covers surface of 3D carrier
4.2 觸覺傳感器自然狀態(tài)傳感單元特性分析
搭建標(biāo)定實(shí)驗(yàn)平臺(tái)對(duì)傳感器進(jìn)行標(biāo)定,建立傳感單元電阻值與所受壓力間的關(guān)系,并利用最小二乘法對(duì)輸入、輸出曲線進(jìn)行線性擬合,如圖11所示.

圖11 觸覺傳感器輸入、輸出特性的線性擬合
Fig.11 Linear fitting for input and output characteristics of tactile sensor
原輸入、輸出曲線符合對(duì)數(shù)函數(shù)關(guān)系曲線,為得到良好的線性關(guān)系,對(duì)其進(jìn)行變量代換,令X=x,Y=lny,得到的擬合直線為Y=-0.025 13X+18.688 92,相關(guān)系數(shù)R2=0.963 98,可見擬合效果非常好.
對(duì)傳感單元的主要靜態(tài)特性進(jìn)行測(cè)試和研究. 測(cè)試時(shí),加載力垂直施加于傳感單元,此時(shí)電極間的電阻為R,傳感單元的響應(yīng)縱坐標(biāo)設(shè)為電阻的對(duì)數(shù)Ln(R).
1)線性度. 線性度是用來表征傳感器實(shí)際特性曲線與擬合直線之間偏離程度的指標(biāo),通常用最大偏差量與傳感器滿量程范圍內(nèi)輸出量的百分比來表示,具體計(jì)算公式如下:
可知傳感器的線性度為6.26%.
2)靈敏度. 靈敏度是傳感器的一項(xiàng)重要指標(biāo),是傳感器在穩(wěn)態(tài)下輸出變化值與輸入變化值之比,用K表示,即
由此可知,傳感器的靜態(tài)靈敏度K即為輸入-輸出特性曲線的斜率,本文中壓力觸覺傳感器的靈敏度為0.025 13/kPa.
3)遲滯誤差. 遲滯誤差是指?jìng)鞲衅髟谙嗤ぷ鳁l件下,正向特性和反向特性的不一致程度. 正向特性是指?jìng)鞲衅鞯妮斎胫祻淖钚≈饾u增加到滿量程情況下反應(yīng)的特性,而反向特性與此相反,是指?jìng)鞲衅鞯妮斎胫祻臐M量程逐漸減小到最小值. 由于遲滯現(xiàn)象的存在,正向特性曲線與反向特性曲線不重合,如圖12所示.

圖12 傳感器的遲滯特性Fig.12 Hysteresis characteristics of sensor
遲滯誤差可通過下式計(jì)算:
式中:ΔHmax為最大遲滯偏差,代入數(shù)據(jù)得到遲滯誤差為5.6%. 由于遲滯現(xiàn)象會(huì)引起重復(fù)性、分辨力變差,或造成測(cè)量盲區(qū),因此一般情況希望遲滯越小越好. 傳感器產(chǎn)生遲滯主要是受到敏感材料壓阻橡膠的彈性滯后、傳感器各層間的摩擦以及傳感器結(jié)構(gòu)的間隙等因素的影響.
4)重復(fù)性. 重復(fù)性是指?jìng)鞲衅髟谕环较蚨啻螠y(cè)量時(shí),所得到的特性曲線不一致的程度. 圖13為傳感器陣列的重復(fù)性試驗(yàn)結(jié)果. 在該傳感單元上進(jìn)行重復(fù)加載試驗(yàn),重復(fù)10次得到的最大偏差為ΔKmax=0.84,由
計(jì)算得到重復(fù)性為8.22%.

圖13 重復(fù)性試驗(yàn)結(jié)果Fig.13 Repeatable test results
可見,電子皮膚觸覺傳感器在自然狀態(tài)下均具有較高的線性度和靈敏度,較小的遲滯誤差及良好的重復(fù)性.
4.3 觸覺傳感器拉伸狀態(tài)傳感單元特性分析
為進(jìn)一步證明觸覺傳感器的高柔彈性,對(duì)其拉伸狀態(tài)的傳感單元特性進(jìn)行測(cè)試和分析,如圖14所示,將傳感器沿縱向拉伸30%,測(cè)試傳感單元電阻值與所受壓力間的關(guān)系. 由于輸入、輸出曲線符合對(duì)數(shù)函數(shù)曲線特征,對(duì)其進(jìn)行變量代換,令X=x,Y=lny,并利用最小二乘法對(duì)輸入、輸出曲線進(jìn)行線性擬合,得到圖15所示的擬合直線為Y=-0.024 92X+18.637 11,相關(guān)系數(shù)R2=0.962 45,可見擬合效果同樣非常好.

圖14 傳感器拉伸狀態(tài)傳感特性測(cè)試
Fig.14 Sensing characteristic test of sensor during stretching state
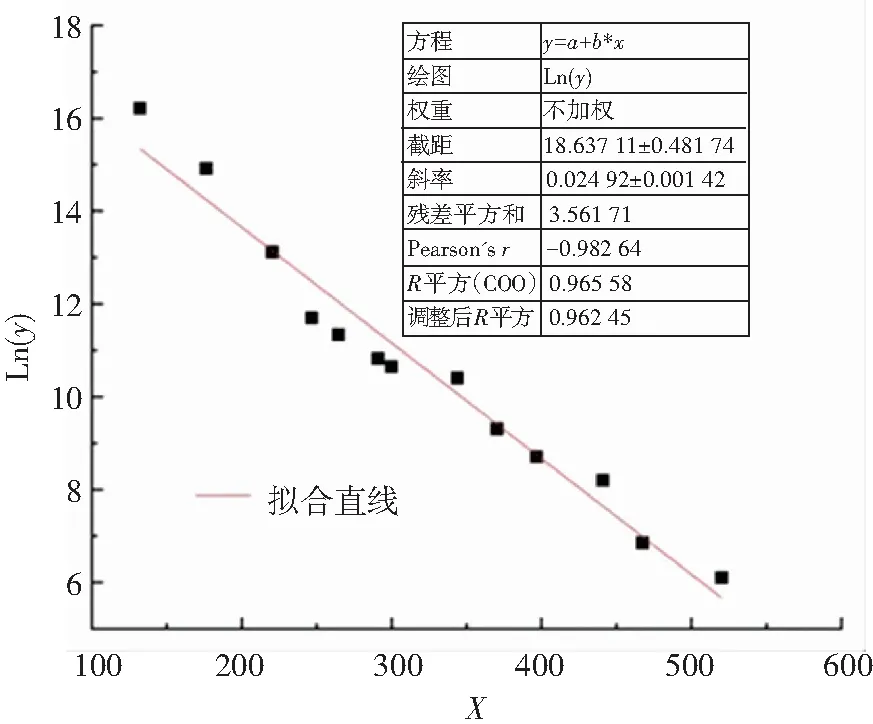
圖15 觸覺傳感器拉伸狀態(tài)輸入、輸出特性的線性擬合
Fig.15 Linear fitting for input and output characteristics of tactile sensor during stretching state
拉伸狀態(tài)下觸覺傳感器的線性度和靈敏度分別為
γL=8.53%,K=0.024 92/kPa.
對(duì)觸覺傳感器的正向特性和反向特性進(jìn)行測(cè)試,得到遲滯誤差為6.1%;對(duì)傳感器陣列進(jìn)行重復(fù)性試驗(yàn),得到觸覺傳感器的重復(fù)性為8.92%.
由以上結(jié)果可知,拉伸狀態(tài)下觸覺傳感器依然具有較高的線性度、靈敏度,較小的遲滯誤差及良好的重復(fù)性. 當(dāng)觸覺傳感器處在拉伸狀態(tài),傳感器的輸出電阻會(huì)有所增加,這是由于導(dǎo)電薄膜電極層被拉伸時(shí),其電阻值會(huì)有小幅度的增大,進(jìn)而影響了輸出電阻的大小. 當(dāng)壓力較大時(shí),傳感單元電阻值較小,此時(shí)電阻值的增加對(duì)其影響較大,因此拉伸狀態(tài)觸覺傳感器的靈敏度比自然狀態(tài)觸覺傳感器的靈敏度小. 但整體上對(duì)觸覺傳感單元傳感特性的影響不大.
4.4 觸覺傳感器性能測(cè)試
當(dāng)傳感器受到外部載荷作用時(shí),基于壓阻原理,可將壓力轉(zhuǎn)化為傳感單元電阻值的變化,通過后續(xù)信號(hào)處理電路,便可確定外界壓力的大小和位置. 為了測(cè)試觸覺傳感器系統(tǒng)的性能,同時(shí)展示其較高的柔彈性,對(duì)傳感器在自然、彎曲等狀態(tài)下進(jìn)行接觸壓力的測(cè)試. 如圖16~20所示,在平鋪于玻璃板和覆蓋于聚氯乙烯(PVC)圓管兩種情況下,測(cè)試了5種不同載荷條件下的壓力分布圖,觸覺傳感器能夠清晰的分辨出復(fù)雜界面上接觸部位的輪廓以及壓力大小的分布,說明傳感器系統(tǒng)運(yùn)行良好.
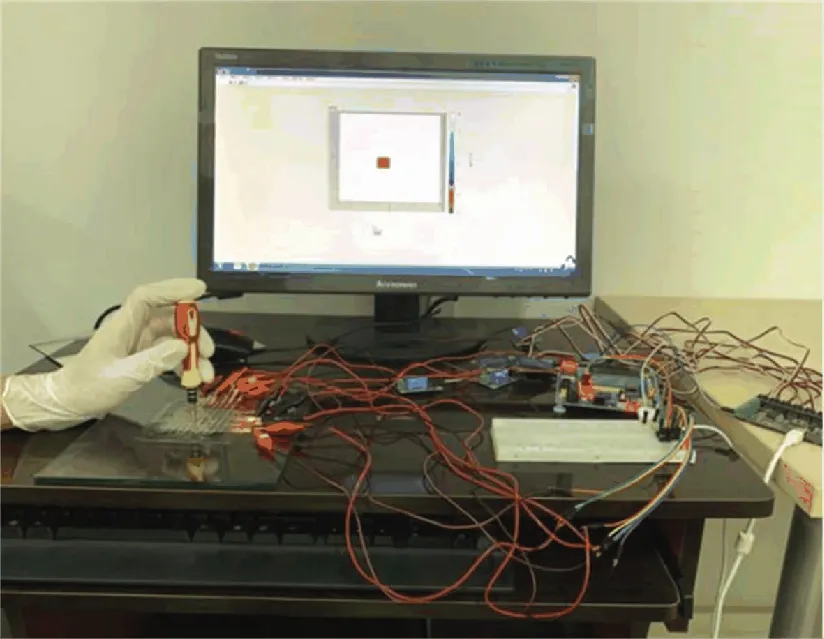
圖16 觸覺傳感器平鋪于玻璃板時(shí)點(diǎn)的壓力分布
Fig.16 Pressure distribution of point when tactile sensor is laid on glass plate

圖17 觸覺傳感器平鋪于玻璃板時(shí)金屬棒的壓力分布
Fig.17 Pressure distribution of metal rod when tactile sensor is laid on glass plate

圖18 觸覺傳感器平鋪于玻璃板時(shí)PVC圓管的壓力分布
Fig.18 Pressure distribution of PVC pipe when tactile sensor is laid on glass plate

圖19 觸覺傳感器覆蓋于PVC圓管時(shí)點(diǎn)的壓力分布
Fig.19 Pressure distribution of point when tactile sensor is covers PVC tube

圖20 觸覺傳感器覆蓋于PVC圓管時(shí)金屬棒的壓力分布
Fig.20 Pressure distribution of metal rod when tactile sensor is covers PVC tube
5 結(jié) 論
1)采用新型AgNWs/PDMS復(fù)合材料,基于半圓與圓形相結(jié)合的高柔彈性導(dǎo)電薄膜電極層及陣列式“多孔PDMS”的新型“三明治”式傳感器陣列結(jié)構(gòu),通過模具固化成型工藝制作了高柔彈性電子皮膚壓力觸覺傳感器.
2)壓力觸覺傳感器陣列采用了行列電極的結(jié)構(gòu)形式,減少了傳感器陣列與信號(hào)處理電路的外接引線,利用數(shù)據(jù)采集卡、微控制器、掃描電路、計(jì)算機(jī)及LabVIEW軟件搭建了高柔彈性電子皮膚壓力觸覺傳感器的測(cè)試系統(tǒng). 測(cè)試結(jié)果表明:高彈性柔性電子皮膚壓力觸覺傳感器具有良好的機(jī)械特性,其彈性拉伸率超越人類皮膚的彈性,達(dá)到了30%,易于大面積制作,可擴(kuò)展性強(qiáng),成本低;可覆蓋于機(jī)器人等復(fù)雜三維載體表面,在不同載荷條件下完成壓力大小及分布情況的測(cè)量;具有較高的線性度、靈敏度及較小的遲滯誤差,在醫(yī)療保健、運(yùn)動(dòng)健康、智能家居等諸多領(lǐng)域具有廣泛的應(yīng)用前景.