基于激光掃描的發(fā)動機(jī)凸輪軸蓋逆向測量與建模*
2020-06-23 07:15:00龔海軍黃仁清張夢祥謝文章
機(jī)械制造 2020年6期
□ 龔海軍 □ 周 濤 □ 李 歡 □ 黃仁清 □ 張夢祥 □ 謝文章
1.重慶交通大學(xué) 機(jī)電與車輛工程學(xué)院 重慶 400074 2.重慶機(jī)電增材制造有限公司 重慶 400074
1 研究背景
在汽車零部件產(chǎn)品設(shè)計(jì)前期,工程師對產(chǎn)品的造型設(shè)計(jì)主要采用概念設(shè)計(jì)、計(jì)算機(jī)輔助設(shè)計(jì)與制造系統(tǒng)、制造系統(tǒng)、新產(chǎn)品的正向設(shè)計(jì)方法。但是,對于復(fù)雜的產(chǎn)品,正向設(shè)計(jì)方法表現(xiàn)出不足,包括設(shè)計(jì)過程難度大、周期長、成本高,不利于產(chǎn)品的研制開發(fā)[1]。工程師無法完全預(yù)估產(chǎn)品在設(shè)計(jì)過程中會出現(xiàn)的狀況,若每次都因?yàn)橐恍┚植繂栴}而導(dǎo)致整個產(chǎn)品設(shè)計(jì)方案推倒重來,則無論是對時間還是對成本而言,都是不可接受的[2]。逆向設(shè)計(jì)通常根據(jù)正向設(shè)計(jì)概念所產(chǎn)生的產(chǎn)品原始模型或已有產(chǎn)品來進(jìn)行改良,通過對產(chǎn)生問題的模型進(jìn)行直接修改、試驗(yàn)和分析,得到相對理想的結(jié)果,然后再基于修正后的模型或樣件,通過掃描和造型等一系列方法得到最終的三維模型[3-4]。
逆向點(diǎn)云數(shù)據(jù)采集方法可以分為接觸式和非接觸式兩種[5]。其中,接觸式具有采集精度高等優(yōu)點(diǎn),但不易采集復(fù)雜零件和大密度數(shù)據(jù);非接觸式采集數(shù)據(jù)密度大,測量周期短,測量過程簡單[6]。筆者以某汽車發(fā)動機(jī)凸輪軸蓋零件為對象,基于法如激光三維掃描儀,通過激光掃描和點(diǎn)云處理重建產(chǎn)品的數(shù)字化模型,為產(chǎn)品生命周期管理過程中產(chǎn)品的改進(jìn)、壓鑄模具的再設(shè)計(jì)等工程提供數(shù)據(jù)。
2 掃描原理
選用法如絕對值關(guān)節(jié)臂式激光三維掃描儀進(jìn)行數(shù)據(jù)采集,其臂長為2.5 m,采用藍(lán)色激光技術(shù)。該掃描儀測量臂具有高達(dá)75 μm的精度,可生成高分辨率點(diǎn)云數(shù)據(jù),不需要涂層或靶標(biāo)即可無縫掃描,操作簡單,具體參數(shù)見表1。

表1 法如絕對值關(guān)節(jié)臂式激光三維掃描儀參數(shù)
法如絕對值關(guān)節(jié)臂式激光三維掃描儀是一種便攜的接觸式測量儀器,采用在測頭上附加小型結(jié)構(gòu)激光掃描頭的方法來實(shí)現(xiàn)對工件的三維快速掃描,系統(tǒng)精度達(dá)2M級。這一掃描儀集接觸式與非接觸式方法優(yōu)點(diǎn)于一體,對空間不同位置待測點(diǎn)的接觸類似人手臂的運(yùn)動[7-8]。與三坐標(biāo)測量機(jī)相比,法如絕對值關(guān)節(jié)臂式激光三維掃描儀的測頭設(shè)置更靈活。與其它光學(xué)測量系統(tǒng)相比,不要求測點(diǎn)的通視條件,對通視條件較差的測點(diǎn)依然有效。測量臂激光掃描基于光學(xué)三角形測量原理[9],將規(guī)則的激光投射到被測量物體表面,形成反射光信號,被空間另一側(cè)的圖像傳感器吸收,根據(jù)信號的偏移,通過被測物體的平面、角度、距離等關(guān)系,按照三角幾何原理反映出被測物體空間坐標(biāo)。光學(xué)三角形測量原理如圖1所示[10]。
若被測表面位置在激光光軸方向移動的距離為y,光斑像在探測器光敏面上的位置相應(yīng)移動的距離為x,則利用相似三角形各邊的比例關(guān)系,可得y和x滿足關(guān)系式(1):
(1)
式中:a0為參考點(diǎn)處激光光斑到成像透鏡物方主平面的距離;b0為光斑像到成像透鏡像方主平面的距離;α為成像透鏡光軸與被測表面法線之間的夾角;β為成像透鏡光軸與探測器光敏面的夾角。
由于各關(guān)節(jié)間測量臂長度是固定的,因此測量臂間的轉(zhuǎn)動角可以通過光柵編碼度盤實(shí)時得到[11]。法如絕對值關(guān)節(jié)臂式激光三維掃描儀共有七個關(guān)節(jié),每個關(guān)節(jié)內(nèi)置位置傳感器,測量轉(zhuǎn)換方程式為[12-13]:
(2)

▲圖1 光學(xué)三角法測量原理
式中:(xp,yp,zp)為掃描儀測頭在測量空間測量點(diǎn)p的坐標(biāo)值;h,r,li,di、αi依次為圓柱坐標(biāo)系下的坐標(biāo)高度、半徑、測量臂長度、位置偏置量、位置扭角;θi為關(guān)節(jié)處圓編碼器測得的角度。
3 零件點(diǎn)云數(shù)據(jù)采集
鋁合金發(fā)動機(jī)凸輪軸蓋零件輪廓尺寸為360 mm×160 mm×26 mm,發(fā)動機(jī)高度方向有凸起,最高凸起尺寸為44 mm。零件壁厚基本均勻,最大壁厚為5 mm。零件如圖2所示。

▲圖2 鋁合金發(fā)動機(jī)凸輪軸蓋零件
法如絕對值關(guān)節(jié)臂式激光三維掃描儀是七軸測量系統(tǒng),可以無縫集成激光掃描頭,適應(yīng)絕大多數(shù)表面材質(zhì)。因此,凸輪軸蓋不需要進(jìn)行任何預(yù)先處理,而可以直接進(jìn)行數(shù)據(jù)采集。可按照先整體、后局部的原則采集凸輪軸蓋正表面、反表面、側(cè)面和孔等的數(shù)據(jù)。
掃描所得點(diǎn)云數(shù)據(jù)的精確性和完整性決定了三維模型的精度。掃描前,將零件表面的雜質(zhì)、油污等清潔干凈,放置于工作臺上,并將法如絕對值關(guān)節(jié)臂式激光三維掃描儀穩(wěn)定放置于平整質(zhì)硬的地面上。數(shù)據(jù)采集時,設(shè)備底座與被掃描物體保持相對靜止。激光掃描過程中,應(yīng)盡量使掃描儀始終垂直于掃描表面,并保持適當(dāng)?shù)膾呙杷俣取呙桀^應(yīng)保持勻速運(yùn)動,避免重復(fù)掃描同一個區(qū)域。細(xì)小的孔和縫掃描時應(yīng)轉(zhuǎn)換角度,盡量采集完整,如確實(shí)掃描不到,應(yīng)保證采集到關(guān)鍵特征,方便逆向建模時進(jìn)行特征擬合。激光掃描完畢后,再進(jìn)行三坐標(biāo)測量,最終掃描所得點(diǎn)云數(shù)據(jù)文件存儲為.asc格式文件,數(shù)據(jù)點(diǎn)共有2 862 744個,文件大小為166 MByte。激光掃描測量如圖3所示,三坐標(biāo)測量如圖4所示,激光掃描點(diǎn)云數(shù)據(jù)如圖5所示。
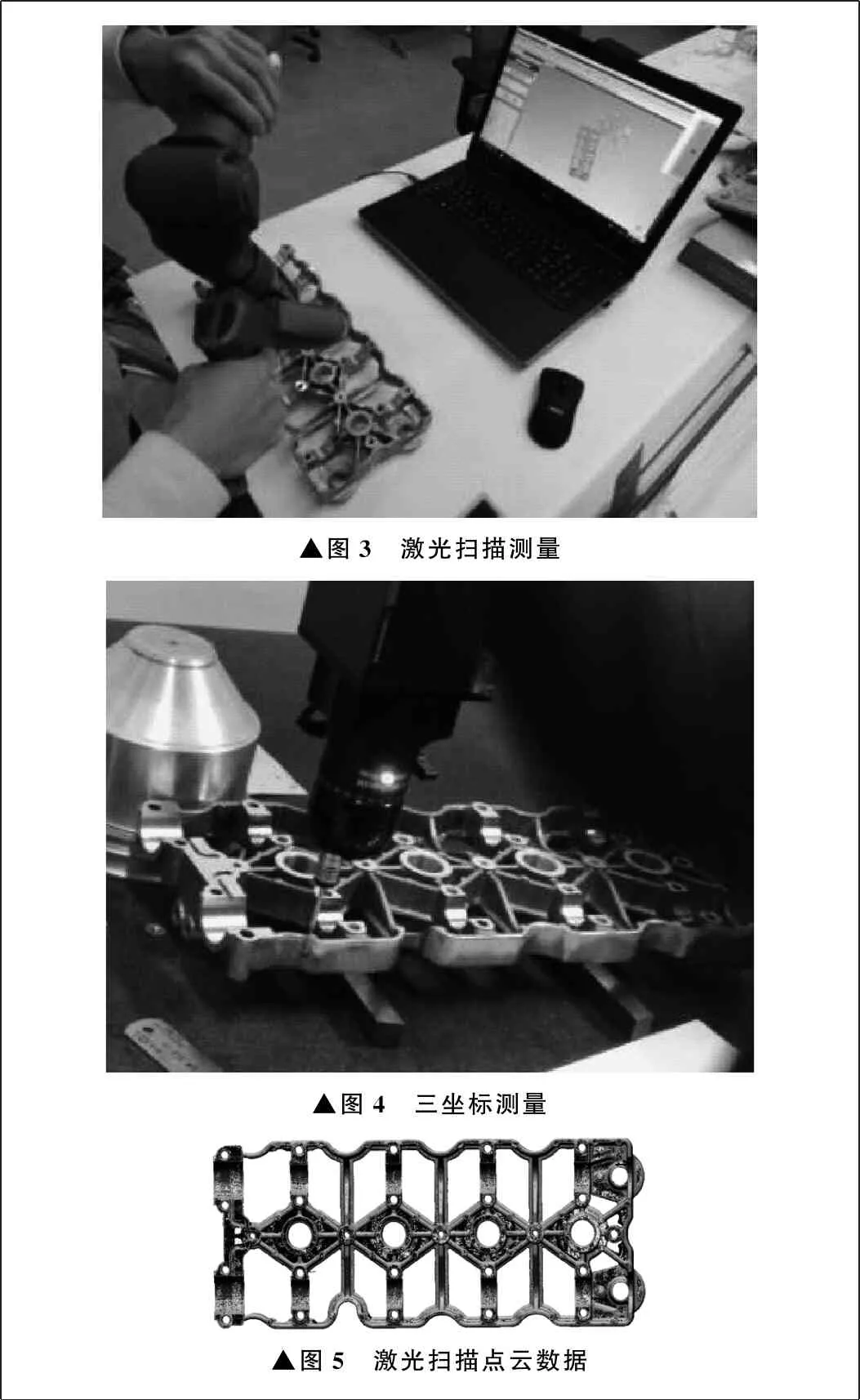
▲圖3 激光掃描測量▲圖4 三坐標(biāo)測量▲圖5 激光掃描點(diǎn)云數(shù)據(jù)
4 點(diǎn)云數(shù)據(jù)預(yù)處理
激光掃描獲得的數(shù)據(jù)為散亂的點(diǎn)云數(shù)據(jù),存在大量冗余數(shù)據(jù)和噪聲點(diǎn)、異點(diǎn)。為提高逆向建模精度,減小數(shù)據(jù)處理量,需要分別對點(diǎn)云數(shù)據(jù)進(jìn)行去噪和精簡預(yù)處理[5]。筆者對點(diǎn)云數(shù)據(jù)進(jìn)行弦偏差采樣和去噪,使數(shù)據(jù)點(diǎn)減少22%。
5 逆向建模步驟
在Geomagic軟件中對零件進(jìn)行逆向建模,整體思路為將點(diǎn)云數(shù)據(jù)按零件特征進(jìn)行分割,然后再按點(diǎn)、線、面的順序逐步擬合和編輯[14],具體步驟如下:
(1) 導(dǎo)入點(diǎn)云數(shù)據(jù),經(jīng)雜點(diǎn)消除、采樣、平滑后,對導(dǎo)入的數(shù)據(jù)進(jìn)行區(qū)塊劃分,軟件可自動識別出掃描物體的平面、圓角、自由曲面等幾何特征;
(2) 追加參照平面,通過由區(qū)塊劃分自動提取出的特征手動對齊坐標(biāo),方便后續(xù)逆向建模;
(3) 進(jìn)行面片草圖設(shè)置,提取輪廓線,優(yōu)化調(diào)整直線段和弧線;
(4) 通過輪廓線拉伸實(shí)體;
(5) 通過提取輪廓線、偏移、拉伸實(shí)體、布爾運(yùn)算、切割、合并等操作,完成零件逆向;
(6) 進(jìn)行誤差分析,修正局部尺寸,輸出最終的.stp格式文件。
6 模型重構(gòu)
6.1 凸輪軸蓋輪廓線擬合
曲線是構(gòu)建曲面的基礎(chǔ),在逆向工程中,通常利用插值或逼近的方式擬合成樣條曲線,再利用掃描、拉伸、放樣等手段生成曲面。由插值方式建立的曲線,必然會通過所有測量的數(shù)據(jù)點(diǎn),因此曲線與數(shù)據(jù)點(diǎn)的誤差為零。但是,在數(shù)據(jù)量過大和存在噪聲點(diǎn)的情況下,曲線控制點(diǎn)可能過多,插值結(jié)果會出現(xiàn)不平滑現(xiàn)象。逼近方式可以允許一個指定誤差,并可以設(shè)定控制點(diǎn)數(shù)量,基于最小二乘法求出曲線與數(shù)據(jù)點(diǎn)之間的距離,進(jìn)行控制點(diǎn)調(diào)整,以滿足誤差要求。由于零件采用激光掃描,點(diǎn)云數(shù)據(jù)量大,因此對于機(jī)加工裝配面的輪廓曲線采用插值擬合,而對于鑄造曲面的輪廓曲線則采用逼近的方式擬合曲線。對關(guān)鍵曲線形狀、尺寸、位置進(jìn)行邊界定義和約束,其它曲線進(jìn)行相應(yīng)編輯,點(diǎn)云數(shù)據(jù)區(qū)域化效果如圖6所示,點(diǎn)云數(shù)據(jù)截面輪廓如圖7所示。

▲圖6 點(diǎn)云數(shù)據(jù)區(qū)域化效果
6.2 三維模型重構(gòu)
獲取零件輪廓曲線后,檢驗(yàn)曲線連續(xù)性和約束條件,并進(jìn)行相應(yīng)修改,確保準(zhǔn)確還原凸輪軸蓋形狀。在輪廓曲線的基礎(chǔ)上進(jìn)行拉伸,然后再進(jìn)行修剪、縫合、倒角等,得到凸輪軸蓋三維模型。
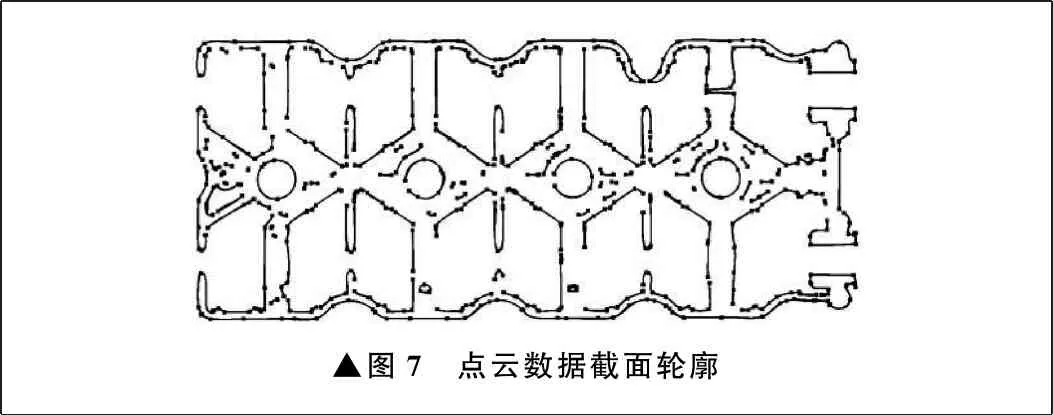
▲圖7 點(diǎn)云數(shù)據(jù)截面輪廓
凸輪軸蓋草圖拉伸效果如圖8所示,凸輪軸蓋建模效果如圖9所示。

▲圖8 凸輪軸蓋草圖拉伸效果▲圖9 凸輪軸蓋建模效果
7 逆向模型精度檢測與分析
將由激光掃描所得點(diǎn)云數(shù)據(jù)逆向重構(gòu)的模型與預(yù)處理后的點(diǎn)云數(shù)據(jù)進(jìn)行對比檢驗(yàn)[15]。由三維分析文件可知,逆向模型與點(diǎn)云數(shù)據(jù)最大誤差為±3.7 mm,整體誤差如圖10所示。由圖10可見,零件中部平面加工及弧形區(qū)域整體誤差較小,原因是幾何特征簡單,擬合曲線、平面與點(diǎn)云數(shù)據(jù)能很好貼合;其它區(qū)域局部逆向模型與點(diǎn)云數(shù)據(jù)存在相對大的誤差,特別是軸孔的圓環(huán)平面與下邊沿,在拉伸過程中尺寸過大。
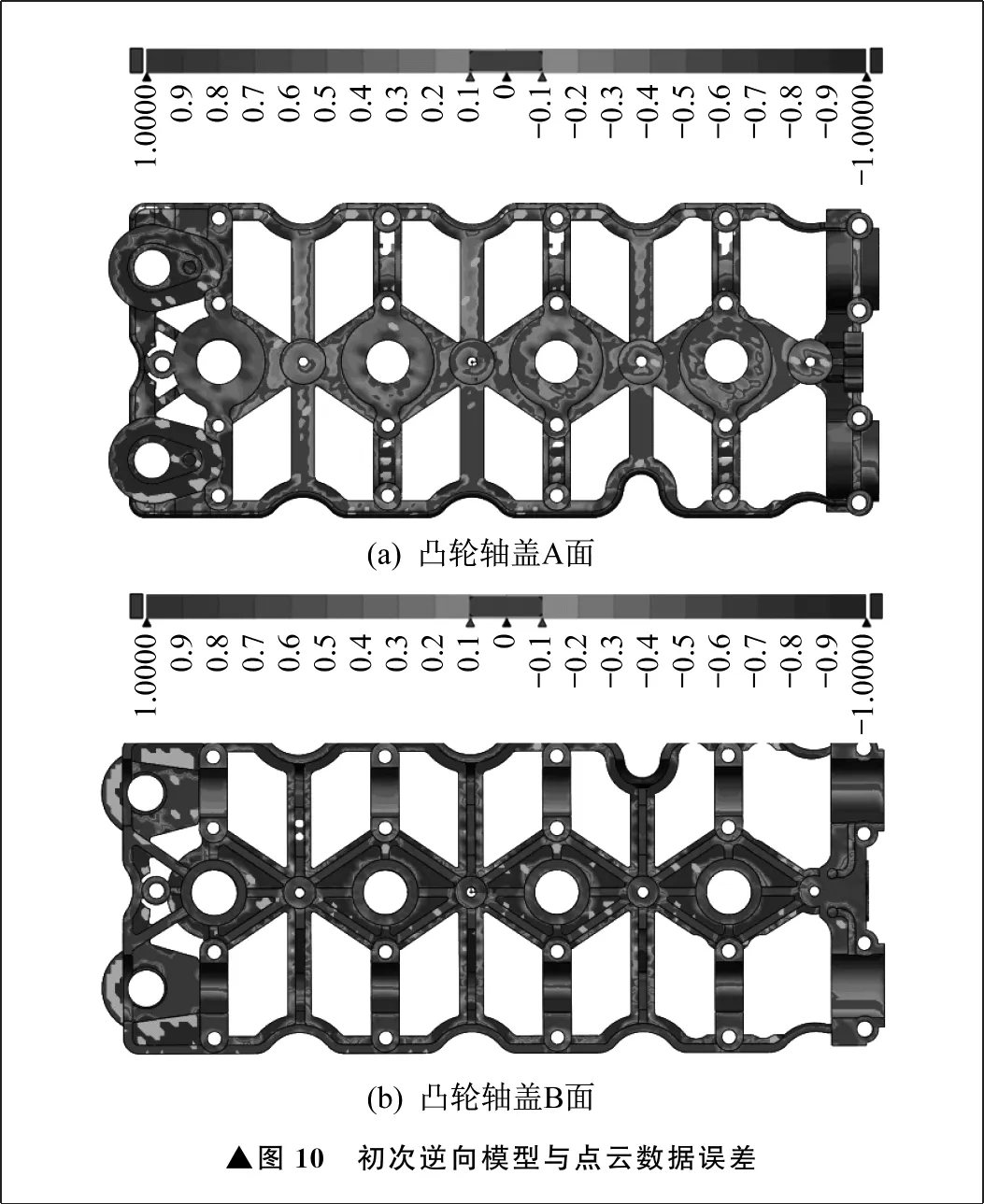
▲圖10 初次逆向模型與點(diǎn)云數(shù)據(jù)誤差
根據(jù)初次逆向模型誤差產(chǎn)生的原因進(jìn)行相應(yīng)修改,整體誤差如圖11所示。

▲圖11 改進(jìn)后逆向模型與點(diǎn)云誤差
由圖11可見,經(jīng)過改進(jìn)后,逆向模型與點(diǎn)云數(shù)據(jù)更加貼合,模型只在局部區(qū)域形成誤差。特別需要指出的是,圖11中模型兩長邊誤差位置和大小具有對稱性,這表明誤差主要由定位引起,并非實(shí)際逆向模型不精確所致。
由逆向模型與點(diǎn)云數(shù)據(jù)的對比分析顯示,兩者平均誤差最小為-0.066 mm,高于測量臂75 μm的精度,而由逆向模型與點(diǎn)云數(shù)據(jù)定位引起的局部最大誤差為3.774 mm,主要存在于個別非加工的鑄造表面,由此可以認(rèn)為逆向模型與點(diǎn)云數(shù)據(jù)誤差極小,完全符合要求。
值得注意的是,逆向建模質(zhì)量的高低并非完全取決于逆向模型與點(diǎn)云數(shù)據(jù)的貼合程度。因?yàn)榧す鈷呙钄?shù)據(jù)及壓鑄產(chǎn)品本身會存在測量、制造、加工誤差,而且逆向模型更關(guān)鍵的作用是還原零件原型的設(shè)計(jì)尺寸和設(shè)計(jì)思想。
筆者進(jìn)行了逆向模型的精確度分析,用于反映重構(gòu)模型與所測樣件之間的偏差。將激光三維掃描點(diǎn)云數(shù)據(jù)逆向模型設(shè)置為檢測對象,三坐標(biāo)測量逆向模型設(shè)置為參考對象,通過最佳擬合方式對齊后進(jìn)行三維比較。三維比較結(jié)果顯示,檢測結(jié)果的最大偏差為±0.867 mm,平均偏差為0,標(biāo)準(zhǔn)偏差為0.004 mm。重構(gòu)模型偏差較大的部分基本集中在部件邊角處等鑄造表面,大部分裝配孔及裝配面的曲面精度很高。激光三維掃描與三坐標(biāo)測量逆向模型三維比較如圖12所示。

▲圖12 激光三維掃描與三坐標(biāo)測量逆向模型三維比較
一般而言,激光掃描點(diǎn)云數(shù)據(jù)逆向模型與三坐標(biāo)測量逆向模型的關(guān)鍵尺寸都是在測量結(jié)果基礎(chǔ)上圓整的。因?yàn)樵O(shè)計(jì)時主要幾何參數(shù)多數(shù)是整數(shù),所以這種圓整處理力求還原原始設(shè)計(jì)尺寸和思想,同時也縮小兩種逆向建模結(jié)果的誤差。局部非重要鑄造表面的最大偏差達(dá)到±0.867 mm,原因一方面是兩種測量方法都存在測量誤差,另一方面是非重要區(qū)域建模時幾何尺寸取舍不一。經(jīng)過充分驗(yàn)證和迭代測試,確認(rèn)重構(gòu)模型精確度符合壓鑄類零件的工程精度要求。
8 結(jié)束語
通過法如絕對值關(guān)節(jié)臂式激光三維掃描儀對發(fā)動機(jī)凸輪軸蓋采集點(diǎn)云數(shù)據(jù),然后根據(jù)點(diǎn)云數(shù)據(jù)特征進(jìn)行分割、提取輪廓線、拉伸實(shí)體、合并等操作,得到零件最終的三維模型。通過與三坐標(biāo)測量模型進(jìn)行對比分析,確認(rèn)最大偏差為±0.867 mm,滿足壓鑄件精度要求。結(jié)果表明,基于激光掃描的數(shù)據(jù)采集與模型重構(gòu)方法為金屬零件重構(gòu)提供了一種準(zhǔn)確、快速的反求方法,為驗(yàn)證原型產(chǎn)品設(shè)計(jì)意圖及對產(chǎn)品改進(jìn)、再設(shè)計(jì)提供了方便,并縮短了產(chǎn)品的開發(fā)周期。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
