220kV高壓電力極端環境下帶電作業機器人控制方法研究
2020-06-15 02:48:32鄒德華李紅軍
武漢紡織大學學報 2020年2期
鄒德華, 江 維, 李紅軍
(1.國網湖南省電力有限公司 輸電檢修分公司,湖南 長沙 410100;2.武漢紡織大學 機械工程與自動化學院,湖北 武漢 430073)
電力是國民經濟的命脈,高壓線纜是電能傳輸的重要通道,其特殊地理環境和惡劣自然環境會導致線上多種不同故障發生,為保障高壓輸電線路的安全正常穩定運行及有效降低經濟損失,需要定期和不定期地對導線金具及其運行環境進行檢修維護和施工作業。目前,這類在危險、惡劣環境下的特種作業均是由人工來完成,不僅勞動強度大、作業效率低而且存在極大的人身安全風險,對于遠離桿塔處的維修作業,只能停電進行作業。隨著輸電質量與作業安全性的考核指標越來越高,以及現代電力系統作業與管理自動化的迫切需求,這種人工作業方式與現代高質量電力輸送之間的矛盾愈發凸顯。因此,帶電作業機器人[1-4]替換人工進行帶電作業是一種有效的措施,其對于提高作業效率、作業可靠性、作業人員安全性具有重要的實際應用價值。帶電作業機器人行走于大柔性的輸電導線,在眾多的極端擾動因素[5-6]中超強電磁干擾和導線大柔性對系統的影響是不可避免的,此外,風載荷以其隨機性和多發性占據著主要影響因素,由于隨機高空風載荷[7-8]將使機器人末端攝像機擺動頻率過大對焦困難,造成定位圖像模糊,產生大量無效照片或視頻,不僅耗費內存資源而且導致視覺伺服控制過程變長、通信卡頓、定位精度變低等,此外,由于風載荷的作用導致機器人抖動發生及重心的偏移,機器人在線上運動過程中特別是旋轉動作,由于自身重量以及導線的柔性弧垂,機箱重心會相對地面下降也會影響到末端定位控制,這些在工業機器人領域無需考慮的問題在特種極端作業環境下顯得尤為重要,因此,研究電力極端環境下的柔性導線帶電作業機器人魯棒控制具有較強理論意義實際應用價值。
1 機器人-大柔性輸電導線間的耦合數學模型
目前傳統方法中所建立的是自然理想狀態下的架空導線數學模型,其忽略了弧垂對于機器人作業控制的影響,然而,當機器人在導線上行走時,由于機器人的附加重量,導線會產生附加弧垂,會對機器人機械臂末端定位精度造成影響。隨著機器人在導線上的行走,運動到不同位置都有不同的弧垂,因此,機器人本身和作業環境中的導線存在一定耦合關系,附加機器人重量的弧垂示意圖如圖1所示。
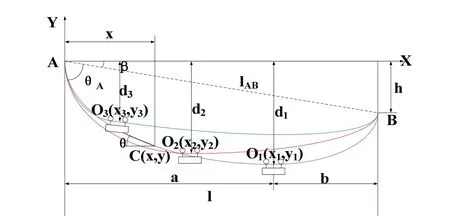
圖1 附加機器人重量的大柔性輸電導線弧垂示意圖
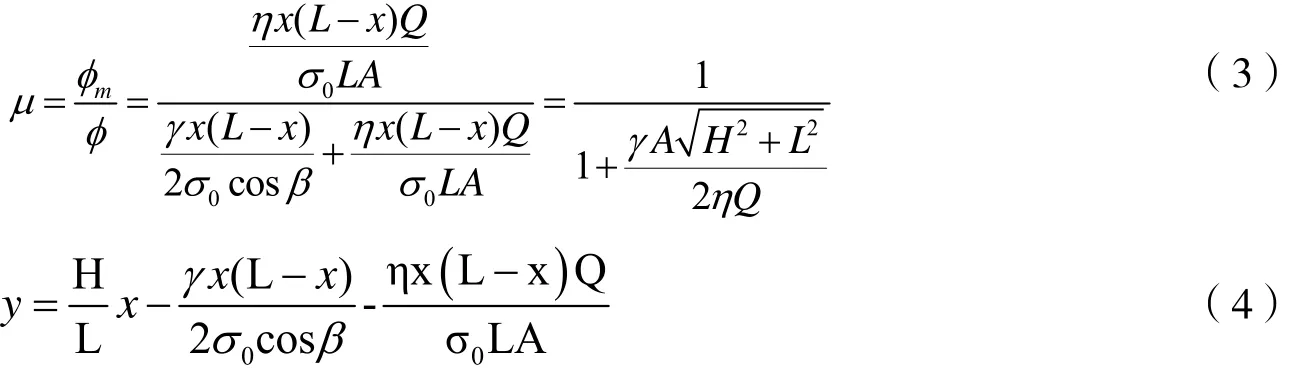
在圖1中,以AB連線與機器人重心所在的豎直線的交點為坐標原點,L為檔距,x為機器人所在位置相對于A的橫坐標,y為縱坐標,因此,可得到附加機器人重量的總弧垂為(1)式。其中,n為沖擊效應的增大系數,A為導線為截面積,Q為附加重量,即為機器人的重量。通過對弧垂數學模型求導可得, 當x=L/2,即在檔段的中間處自然弧垂和附加弧垂最大,附加機器人重量的總弧垂最大值為(2)式。

設附加弧垂與總弧垂的比值為附加弧垂比μ,如(3)式所示,因此,檔距和高差越大,弧垂附加弧垂比越小,所以,斜拋物線公式要改進為附加機器人重量的斜拋物線公式(4)式。
2 風載荷作用下機器人側傾數學模型
如圖2所示為風載荷作用下機器人側傾示意圖,其中圖2(a)為理想情況下無風載荷作用示意圖,機器人無側傾,圖2(b)為實際風載荷作用下,由于風力,整個機體包括作業末端出現了側傾角?。作用于機器人上的風載荷受力可以分為橫向風力Fx,升力Fy,機器人行駛方向的風力Fz。其中,Fz方向與機器人行駛同向或反向;橫向風力Fx、升力Fy主要影響機器人在以導線為軸線的左右橫向擺動和上下振動2個方向的擾動,并且呈現一定的周期性。根據準靜態理論可得橫向風力Fx如(5)式所示,其中ρ為空氣密度,α為風速不均勻系數,K為空氣動力系數,Kh為高空風速增大系數,A為迎風側投影等效面積;v為風速,ξ為橫向風力與機器人機箱迎風面的夾角,因此,可以得到機器人的側傾風偏角?為(6)式。


圖2 風載荷作用對于機器人控制的影響示意圖

3 機器人進出電磁場等效模型
高電壓、強電磁干擾對于機器人運動的影響,其關鍵是高壓導線周圍電磁場的分布及機器人的防電磁干擾控制方法。空間任意一點的電場強度可采用等效電荷法進行計算,輸電線路上的電荷為線電荷,且導線半徑遠小于桿塔高度,因此,可認為等效電荷處于導線中心,在求出單位導線的等效電荷后,根據疊加原理可以得到空間場強的數學表征E為(7)式。其中xi,yi是導線I(i=1、2、3、…、m) 的坐標,m是導線數目;Li是導線I與計算點的距離,Li*則是導線i的鏡像與計算點的距離,U是輸電導線對地電壓矩陣;Q是各導線等效電荷矩陣;χ是輸電導線電位系數組成的方陣。

因此,通過計算分析可知離線路中心越近,電場強度越高,隨著機器人與帶電導線進一步地接近,電磁感應作用愈來愈強,兩者間局部場強也越來越高,當機器人與導線間距足夠小的時候,空氣發生游離,機器人與導線通過空氣放電,當機器人輪子完全著線或者作業末端接觸到作業對象時,正負電荷中和完成,兩者處于同一電位,可見機器人與導線等電位過程將產生較大的暫態電容放電電流,當機器人沿絕緣體靠近帶電導線時,空氣發生電離,形成一個放電回路,放電瞬間相當于開關k接通,沖擊電流初始值Is=U/R,其中U為機器人與帶電導線之間的電位差,R為機器人本體電阻。
4 試驗研究
4.1 超強電磁干擾工頻耐壓試驗
帶電作業機器人工作于高電壓、強電磁干擾環境下,為驗證機器人在強電磁干擾環境下的作業能力,在高電壓試驗大廳對機器人進行工頻耐壓試驗,通過紫外成像儀測得的機器人紫外成像如圖3所示,在220kV和330kV電壓等級下機器人的運行狀態如表1所述。

圖3 高壓大廳機器人紫外成像圖

表1 機器人工頻耐壓試驗結果
從機器人的工頻耐壓試驗結果可知,在220kV和330kV高電壓情況下,機器人各項指標都正常,機器人能夠實時準確接收并響應地面基站的控制指令,地面基站能夠實時準確接收并顯示機器人的狀態反饋信息,安裝在雙作業機械手上的4個攝像機正常工作,圖像視頻信息傳遞清晰流暢,機器人各關節運動表現了較強的魯棒性。

圖4 帶電作業機器人現場作業試驗
4.2 現場作業試驗
為進一步檢驗極端高壓電力環境下柔性導線檢修作業機器人控制方法的工程實用性,在中國湖南省電力公司輸電檢修分公司帶電作業中心管轄的 220KV高壓輸電線路上進行機器人帶電作業試驗,機器人作業手由初始位姿經各關節協調運動到達絕緣子更換及引板緊固作業狀態,其作業現場如圖4所示。通過現場作業試驗圖4可知,在以風載荷為主要外部擾動和大柔性、超強電磁場的固有干擾實際帶電作業環境下,機器人各關節協調運動,機器人雙移動臂、雙作業手由初始狀態進入到工作狀態,再到螺栓定位及捕捉定位等關鍵狀態下,整個過程機器人雙作業手及其末端各關節動作流暢、連續、平穩,機器人作業臂運動獲得了較好的魯棒性,該方法獲得了較強的工程實用性,進一步提高了機器人作業效率,并且一定程度上體現了機器人作業的智能性。
5 結論
本文建立了大柔性輸電導線帶機器人自重的弧垂數學模型,探究了高空隨機風載荷作用下機器人的側傾模型,給出了極端環境下超強電磁干擾的分布特性,為極端環境下,機器人魯棒運動控制奠定理論基礎。通過工頻耐壓試驗、現場極端環境作用下機器人絕緣子更換和引流板緊固帶電作業試驗進一步驗證了機器人控制算法的工程實用性,從而進一步提高了機器人的作業效率及作業智能性。后續的相關研究主要包括對于超強電磁干擾的數學描述進行定量計算及其智能魯棒控制算法與系統的設計開發。
猜你喜歡
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
中國生殖健康(2019年11期)2019-01-07 01:28:02
中國生殖健康(2018年6期)2018-11-06 07:09:28
故事大王(2016年7期)2016-09-22 17:30:08