SINS/DVL組合導航技術綜述
2020-06-15 06:13:12劉涇洋劉沛佳
導航定位學報 2020年3期
王 博,劉涇洋,劉沛佳
SINS/DVL組合導航技術綜述
王 博,劉涇洋,劉沛佳
(北京理工大學 自動化學院,北京 100081)
為了進一步研究水下導航技術,對廣泛使用的自主水下航行器導航技術中的捷聯慣導系統(SINS)和多普勒計程儀 (DVL)組合導航系統進行闡述:介紹SINS和DVL的獨立性、自主性、隱蔽性和高精度等特點;給出SINS/DVL組合導航系統中關鍵技術的應用及研究現狀,包括多源信息濾波融合技術、誤差標定技術和初始對準技術;最后討論水下SINS/DVL組合導航技術的未來研究熱點。
慣性導航系統;多普勒計程儀;多源濾波融合;誤差標定;初始對準
0 引言
隨著社會的不斷發展,對資源、食物的需求正在迅猛增加,自21世紀以來,開啟了進軍海洋的新篇章。自主水下航行器(autonomous underwater vehicle, AUV)在利用和開發海洋的過程中發揮了至關重要的作用[1-2],人們在完成各種水下作業時,離不開高精度的導航技術。AUV具有自主性高、體積小、活動范圍廣、隱蔽性要求高等特點。AUV的導航系統是以捷聯慣導系統(strapdown inertial navigation system, SINS)為主,其他導航系統或傳感器為輔,實現完全自主導航的組合導航系統。目前,水下導航通常可以分為4種方式:慣性導航[3-8]、航位推算導航、水聲定位導航[9-13]及地球物理導航[14-20]。多普勒計程儀(Doppler velocity log, DVL)是1種根據多普勒效應原理,測量AUV速度的聲學儀器,它可以通過安裝在底部的換能器發射超聲波實現上述功能[21],如圖1所示。目前最流行的AUV水下導航方式是SINS/DVL結合的組合導航[22-25]。
1 SINS/DVL組合導航系統
對于長基線定位系統(long baseline, LBL)、短基線定位系統(short baseline, SBL)和超短基線導航系統(ultra short baseline,USBL)等聲學導航方法,它們的應用條件較為苛刻,需要在附近水面設置發射基站。對于長基線和短基線水聲定位系統而言,需要在海面或海底設置3個或多個固定接收應答器,水下航行器和應答器之間發送詢問應答信號,根據信號往返時間,確定水下航行器到各應答器之間的距離,進而解算得到水下航行器的位置。超短基線水聲定位系統只需設置1個應答器,在水下航行器上安裝有水聽器組件,該組件含有多個水聽器基陣元,基陣元間的距離為幾厘米,通過量測應答器信號到達各個陣元的時間差或相位差,即可解算得到水下航行器的位置。
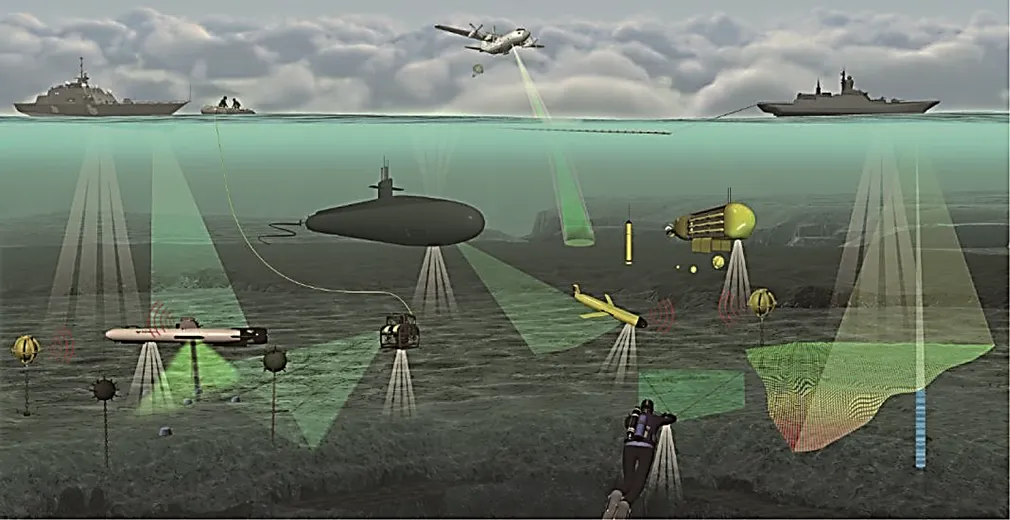
圖1 DVL的具體應用
地球物理導航包括地形匹配導航、地磁匹配導航及重力匹配導航,該導航方法需要先驗條件(如該區域預先存儲的重力場圖、磁場圖等),但這些先驗條件往往是難以獲得的,因此這種導航方法存在一定的局限性。
SINS/DVL組合導航系統利用DVL提供的高精度速度信息,來抑制SINS定位誤差的累積,具有自主性和定位精度高的優點,是目前廣泛應用的較為成熟的水下導航系統。該系統主要包含以下3個部分。
1.1 慣性導航系統
慣性導航系統通過測量載體在慣性坐標系下的運動加速度,在導航坐標系內經積分運算,可以實時解算出載體的姿態角、速度、位置等導航信息。慣性導航系統進行導航參數解算時,既不依賴任何外部信息,也不向外輻射能量,只依靠加速度計和陀螺儀這2種慣性器件,是1種自主式的導航系統,在軍事領域、航空航天領域和交通運輸領域等得到了廣泛的應用。
但是,即使是高精度導航級的SINS,由于慣性傳感器固有的漂移誤差,SINS雖然能夠在短時間內提供較高的導航精度,但卻存在著導航誤差隨時間累積的情況。因此慣性導航系統通常需要輔以其他傳感器或導航系統進行組合導航,以抑制誤差發散,否則將無法實現長航時的高精度導航定位。
1.2 多普勒計程儀
目前大多數廠家生產的DVL具有雙重功能,既可以測量AUV相對于海底的速度,也可以測量海水的水流速度,雙重功能的切換是通過軟件控制來完成的。為了實現高精度組合導航,廣泛使用DVL的底跟蹤模式最。在底跟蹤模式下,DVL的測速精度可以達到當前速度的0.2 %,并且數據更新頻率最快可以達到5 Hz[26]。DVL可根據實際應用場景和任務需求,調節信號發射、接收和處理方法(主要分為2種:窄帶技術和寬帶技術)。窄帶技術和寬帶技術主要影響DVL測速精度和測速量程:窄帶DVL量測噪聲大的在垂向和水平方向流速測量精度較低,但量程較大;寬帶DVL量測精度高,空間和時間分辨率較高,但量程較小。
1.3 SIN/DVL組合導航
SINS/DVL組合導航,即使用SINS和DVL的量測值,通過卡爾曼(Kalman)濾波算法實時地估計出AUV的導航參數,包括速度、位置和姿態信息。慣性導航系統(inertial navigation system, INS)與DVL組合導航有2種方式:松組合方式和緊組合方式。當外部觀測信息為DVL提供的AUV在載體系下的速度(3維)測量數據時,采用的是松組合模式;當外部觀測信息是DVL原始的波束量測(由于最多采用的DVL為4波束,因此原始波束量測通常為4維)數據時,采用的是緊組合模式。目前,在實際應用的INS/DVL組合導航系統中,絕大多數采用的是松組合方式;有關INS/DVL組合導航的研究也集中針對松組合方式。但當DVL的部分波束量測量數據受限無法使用時,則DVL無法解算出AUV在載體系下的實時速度,這會導致松組合模式無法使用;因此對緊組合模式的研究十分必要。并且在緊組合模式下,組合導航的定位精度將會進一步提高。
2 SINS/DVL組合導航系統中關鍵技術的研究現狀
2.1 多源信息濾波融合技術
AUV的導航及控制,不可避免地使用到各種傳感器來處理各種信號。信號是傳遞和承載信息的載體,是時間或空間的函數。信號在傳輸和檢測的過程中,會受到外來干擾或者設備內部噪聲的干擾。為了獲得有用信號并將干擾排除,就要使用濾波技術。從含有噪聲的原始信號中提取有用信號的過程被稱為濾波[27]。
組合導航技術是通過最優估計理論,對不同導航系統中,同一導航參數的量測數據做最優化的處理。目前在組合導航中,普遍使用的是Kalman濾波算法及其衍生算法。Kalman濾波算法是1種時域遞推最小均方差估計方法,針對系統噪聲和觀測噪聲呈高斯分布的線性系統,它具有最優的估計效果[28]。標準Kalman濾波器只適用于線性系統,而實際系統都是非線性系統,針對這個問題,人們提出過許多濾波方法來解算非線性系統的數據[20-30]。對于非線性程度比較弱的系統,文獻[31]對卡爾曼濾波算法進行非線性擴展,提出了擴展卡爾曼濾波算法(extended Kalman filter, EKF)。雖然EKF是1種非線性卡爾曼濾波,可解決系統方程和量測方程為非線性時的最優估計問題,但由于它舍棄了泰勒級數中的高階非線性項,其本質上還是線性卡爾曼濾波,因此EKF只適用于非線性比較弱的系統。當系統維度較高、非線性較強時,則擴展卡爾曼濾波性能較差,最終導致濾波精度下降,甚至導致濾波結果發散。
為了克服EKF的不足,解決強非線性系統的估計問題,文獻[32]提出了無跡卡爾曼濾波算法(unscented Kalman filter, UKF)[32]。另外,由于標準卡爾曼濾波器除了不能解決非線性系統的估計問題外,當過程噪聲和量測噪聲的誤差特性不滿足高斯白噪聲時,標準卡爾曼濾波器也不能產生良好的估計效果,為此提出了粒子濾波(particle filter, PF)[33]。PF是除了UKF之外,另1種能夠解決強非線性系統的估計問題的濾波方法,它直接根據概率密度計算條件均值,即最小方差估計。PF的估計精度高于單獨采用EKF或UKF時的精度,但計算量也會有明顯的增加。
除此之外,人們還針對不同的應用背景,提出過多種其他的濾波方法,如自適應濾波[34]、變結構多模型濾波[35]、容積Kalman濾波[36]等。
2.2 誤差標定技術
INS/DVL組合導航中,DVL的測速精度是影響組合導航系統導航精度的關鍵因素。影響DVL測速精度的因素主要有以下3種:INS與DVL之間的安裝誤差角;DVL自身的測速誤差(主要包括刻度因數誤差和常值誤差);姿態角動態引入的DVL測速誤差。
最早的標定方法只考慮了航向安裝誤差角,而未考慮其他DVL測速誤差項[37]。但對于一些復雜的運載體軌跡而言,僅僅對航向安裝誤差角進行標定是無法滿足導航精度要求的,因此有學者對標定方法進行改進,實現了對3維安裝誤差角的標定[38-39]。其中,文獻[40-41]提出了1種基于最小二乘的標定方法。該方法將標定問題轉化為位于2個不同坐標系下的3維點列的最小二乘問題。按照點列所指代的導航參數不同,該方法可分為利用速度信息的標定方法、利用位置信息的標定方法以及利用加速度信息的標定方法[42]。其中,利用速度信息的標定方法和利用位置信息的標定方法,需要外部傳感器提供精確的速度和位置信息,這對實際應用的條件要求較為苛刻。利用加速度信息的標定方法,可以實現自標定,但是需要運載體進行復雜的機動,這對AUV的控制提出了很高的要求,從而限制了該方法在實際中的應用。
文獻[43]使用Kalman濾波器對DVL的安裝誤差角進行估計。該方法將3維安裝誤差角作為濾波器狀態變量,需要INS/GNSS組合導航系統提供載體實時的速度信息,這就要求航行器要在水面或者近水面工作才能完成標定工作。文獻[44]提出了1種2點式標定方法,僅需AUV上浮1次即可實現在線標定。然而該方法僅能實現航向安裝誤差角和刻度因數誤差的標定。為解決上述問題,文獻[45]提出了1種3點在線標定方案,可以實現安裝誤差角、刻度因數誤差和常值誤差的全標定,大幅提升標定精度。為實現刻度因數誤差和安裝誤差角的自標定,文獻[46]提出了1種基于系統可觀測性分析的標定方法,該方法無需增加任何額外的傳感器即可完成標定。文獻[47]提出了1種基于奇異值分解(singular value decomposition, SVD)的最小二乘標定方法,它將標定問題轉化成了求解2個點列之間的轉換矩陣問題,容易在實際應用中實現。SVD是線性代數中1種重要的矩陣分解。求解2個點列之間的轉換矩陣問題也被稱為求解Wahba問題,而基于SVD分解的最小二乘估計方法,被認為是Wahba問題的最穩定解法之一,通常被用來提供最小二乘擬合。
在實際應用中,必須考慮到AUV的動態姿態角狀態,這就需要對DVL測速誤差機理進行建模,以減少誤差。文獻[48]討論了AUV轉彎速率對DVL測速精度的影響,但只分析了航向角轉彎速率的影響,且提出的誤差模型相對簡單。文獻[35]分析了非零俯仰角所帶來的影響,但該分析僅限于姿態角動態對于運載體前向速度的影響。文獻[49]建立了基于動態俯仰角的DVL測速誤差模型,但僅討論了存在動態俯仰角的情況,沒有考慮其余姿態角。為了解決上述方法存在的問題,文獻[50]分析了航向角、俯仰角和橫滾角均為動態對DVL測速精度的影響,建立了由動態姿態角進入DVL的測速誤差模型,并提出了1種基于實時姿態信息的校正方法,實驗結果表明,該方法大幅提高了SINS/DVL組合導航的定位精度。
2.3 初始對準
根據基座的不同運動狀態,慣性導航系統的初始對準可分為靜基座初始對準和動基座初始對準。在靜基座條件下,慣性導航系統可以在無任何外部參考信息的條件下實現自對準;而在動基座條件下,需要外部輔助信息才能夠實現對準。一般情況下,初始對準分為粗對準和精對準2個階段。
DVL可以實時地獲得運載體相對于海底的精確速度,這使得INS能借助該外部參考信息進行動基座初始對準[51-52]。在INS動基座初始對準任務中,廣泛使用Kalman濾波器。當誤差量初值為小量時,可以使用標準卡爾曼濾波器進行初始對準;當初始誤差量較大時,使用標準卡爾曼濾波器易導致收斂緩慢甚至發散,這種情況下通常采用非線性卡爾曼濾波器,如EKF、UKF和PF等。文獻[53]提出了1種基于UKF的DVL輔助下的SINS動基座初始對準方案,該方案適用于任意大小初始姿態誤差角的對準;基于UKF的大失準角情況下的初始對準,是目前使用的最為廣泛的對準方法。
為了解決AUV因海上風浪出現擺動而產生的角運動,文獻[54]提出了1種基于重力加速度的粗對準算法來解決搖擺基座的對準問題,實驗結果表明,在存在搖擺情況下,這種方法可實現較高精度對準。文獻[55]提出了慣性系對準方法,該方法把對準問題轉化為求解2個慣性凝固系之間的變換矩陣問題,可適用于任何初始姿態誤差角,但難以達到極限精度。為此,文獻[56-57]提出1種優化對準方法,將對準問題被轉化為1個用矢量序列連續計算姿態的問題,這樣可獲得較高的對準精度。但由于DVL無法提供AUV在水下的精確位置信息,優化對準方法存在一定的局限性。為解決此問題,文獻[58]提出了1種基于回溯的對準方法,該方法忽略了對準時間內載體位置的變化量,因此提高了DVL輔助下的INS初始對準精度,并通過海上實驗驗證了該算法的有效性。
3 未來研究熱點
作為目前應用最為廣泛的INS/DVL水下組合導航技術,未來有幾大熱點將獲得廣泛關注:
1)水下環境十分復雜且充滿不確定性,DVL可能出現故障情況。需要AUV能夠具備應對各種情況時的快速反應能力,同時能最大程度地減少DVL失效所帶來的影響,保證系統短時高精度導航。
2)傳統標定算法存在要求安裝誤差角為小量、需要先驗誤差模型、標定精度有待提高等劣勢,未來可以將DVL誤差標定算法與機器學習、深度學習算法相結合,提升標定精度,減少先驗需求,擴大標定算法使用范圍。
3)目前絕大多數INS/DVL組合導航算法為松組合方式,未來有待進一步研究緊組合耦合方式算法的理論和應用。
4)在實際應用中,絕大多數DVL為4波束配置,其中3個波束量測用于計算AUV在載體系下的速度,另1個波束量測作為冗余。然而在某些情況下,DVL的波束量測數量會少于3個。例如,當AUV沿著海洋海溝航行時,有2束或2束以上的波束信號可能無法到達海底并反射回來,這會導致無法解算得到DVL在載體系下的速度。因此,如何在DVL波束受限情況下實現高精度組合導航,具有重要的研究價值。
4 結束語
地球上絕大部分的面積是海洋,對于海洋特別是深海的探測開發是一大熱點。因此,研究AUV水下導航技術具有重大的現實意義和軍事意義。在眾多水下導航技術中,INS/DVL組合導航技術發展最為成熟,應用最為廣泛,前景最為樂觀,將成為未來水下導航技術中的研究重點。
[1] 尹偉偉, 郭士犖. 非衛星水下導航定位技術綜述[J]. 艦船電子工程, 2017, 37(3): 8-11.
[2] PANISH R, TAYLOR M. Achieving high navigation accuracy using inertial navigation systems in autonomous underwater vehicles[C]//The Institute of Electrical and Electronic Engineers (IEEE). Proceedings of the 2011 OCEANS. Santander, Spain: IEEE, 2011: 1-7.
[3] 練軍想.捷聯慣導動基座對準新方法及導航誤差抑制技術研究[D].長沙: 國防科學技術大學, 2007.
[4] 張紅梅. 水下導航定位技術[M].武漢: 武漢大學出版社, 2010.
[5] 秦永元.慣性導航[M]. 2版. 北京: 科學出版社, 2014: 170-190.
[6] TITTERTON D H, WESTON J L. 捷聯慣性導航技術[M].張天光, 王秀萍, 王麗霞, 等譯. 2版.北京: 國防工業出版社, 2010: 14-26.
[7] 萬德鈞, 房建成. 慣性導航初始對準[M].南京: 東南大學出版社, 1998: 4-7.
[8] 豐璐. 長航時慣導系統阻尼和綜合校正技術研究[D]. 北京: 北京理工大學, 2013.
[9] BINGHAM B, SEERING W. Hypothesis grids: improving long baseline navigation for autonomous underwater vehicles[J]. IEEE Journal of Oceanic Engineering, 2006, 31(1): 209-218.
[10] KINSEY J C, EUSTICE R M, WHITCOMB L L. A survey of underwater vehicle navigation: recent advances and new challenges[C]//International Federation of Automatic Control (IFAC). Proceeding of the 7th IFAC Conference on Maneuvering and Control of Marine Crafts. Lisbon, Portugal: IFAC, 2006: 1-12.
[11] KINSEY J C, SMALLWOOD D A, WHITCOMB L L. A new hydrodynamics test facility for UUV dynamics and control research[C]//The Institute of Electrical and Electronic Engineers (IEEE). Proceedings of 2003 IEEE/MTS Oceans. San Diego, USA: IEEE, 2003: 356-361.
[12] MORGADO M, BATISTA P, OLIVEIRA P, et al. Position USB/DVL sensor-based navigation filter in the presence of unknown ocean currents[J]. Automatic, 2011, 47(12): 2604-2614.
[13] 馮守珍, 吳永亭, 唐秋華. 超短基線聲學定位原理及其應用[J]. 海岸工程, 2002, 21(4): 13-18.
[14] LI H, LIU M Y, LIU K. Bio-inspired geomagnetic navigation method for autonomous underwater vehicle[J]. Journal of Systems Engineering and Electronics, 2017, 28(6): 1203-1209.
[15] 郝燕玲, 趙亞鳳, 胡俊峰.地磁匹配用于水下載體導航的初步分析[J]. 地球物理學進展, 2008, 23(2): 594-598.
[16] 郭有光, 鐘斌, 邊少鋒. 地球重力場確定與重力場匹配導航[J]. 海洋測繪, 2003, 23(5): 61-64.
[17] HAN Y R, WANG B, DENG Z H, et al. A mismatch diagnostic method for TERCOM-based underwater gravity aided navigation[J]. IEEE Sensors Journal, 2017, 17(9): 2880-2888.
[18] KINSEY J C, TIVEY M A, YOERGER D R. Dynamics and navigation of autonomous underwater vehicles for submarine gravity surveying[J]. Geophysics, 2013, 78(3): 55-68.
[19] 韓雨蓉.水下導航重力匹配算法研究[D]. 北京: 北京理工大學, 2017.
[20] 陳小龍. AUV水下地形匹配輔助導航技術研究[D]. 哈爾濱: 哈爾濱工程大學, 2012.
[21] 呂召鵬. SINS/DVL組合導航技術研究[D]. 長沙: 國防科學技術大學, 2011.
[22] 李亮. SINS/DVL組合導航技術研究[D]. 哈爾濱: 哈爾濱工程大學, 2009.
[23] DINC M, HAJIYEV C. Integration of navigation systems for autonomous underwater vehicles[J]. Journal of Marine Engineering & Technology, 2015, 14(1): 32-43.
[24] HEGREN?S ?, RAMSTAD A, PEDERSEN T, et a1. Validation of a new generation DVL for underwater vehicle navigation[C]//The Institute of Electrical and Electronic Engineers(IEEE). Proceedings of 2016 IEEE/OES Autonomous Underwater Vehicles (AUV). Tokyo, Japan: IEEE, 2016: 342-348.
[25] JALVING B, GADE K, SVARTVEIT K, et a1. DVL velocity aiding in the HUGIN 1000 integrated inertial navigation system[J]. Modeling, Identification and Control, 2004, 25(4): 223-235.
[26] TAL A, KLEIN I, KATZ R. Inertial navigation system/Doppler velocity log (INS/DVL) fusion with partial DVL measurements[J]. Sensors, 2017, 17(2): 415.
[27] 付夢印, 鄧志紅, 閆莉萍. Kalman濾波理論及其在導航系統中的應用[M].北京: 科學出版社, 2012.
[28] KALMAN R E. A new approach to linear filtering and prediction problems[J]. Journal of Basic Engineering Transactions, 1960, 82: 35-45.
[29] 王世元, 黃錦旺, 謝志剛, 等. 非線性卡爾曼濾波器[M]. 北京: 電子工業出版社, 2015: 10-30.
[30] XIA Y Q, XING Z R, WANG L S. Comparison of several nonlinear filters for mars entry navigation using radiometric measurements[J]. Journal of Navigation, 2017, 70(50): 983-1001.
[31] TOLEDO-MOREO R, ZAMORA-IZQUIERDO M A, UBEDA-MINARRO B, et al.High-integrity IMM-EKF-based road vehicle navigation with low-cost GPS/SBAS/INS[J]. IEEE Transactions on Intelligent Transportation Systems, 2007, 8(3): 491-511.
[32] JULIER S, UHLMANN J, DURRANTWHYTE H F. A new method for nonlinear transformation of means and covariances in filters and estimates[J]. IEEE Transactions on Automatic Control, 2000, 45(3): 477-482.
[33] ARULAMPALAM M S, MASKELL S, GORDON N, et al. A tutorial on particle filters for online nonlinear/non-gaussian Bayesian tracking[J]. IEEE Transactions on Signal Processing, 2002, 50(2): 174-188.
[34] 王林.水下INS/DVL組合導航與動基快速對準的自適應濾波算法研究[D]. 長沙: 國防科學技術大學, 2013.
[35] 李春靜.慣導/DVL水下動基座初始對準方法研究[D]. 北京: 北京理工大學, 2015.
[36] GAO W, ZHANG Y, WANG J G. A strapdown inertial navigation system/BeiDou/Doppler velocity log integrated navigation algorithm based on a cubature Kalman filter[J]. Sensors, 2014, 14(1): 1511-1527.
[37] JOYCE T M. On in situ “calibration” on shipboard ADCPs[J]. Journal of Atmospheric & Oceanographic Technology, 1989, 6(1): 169-172.
[38] POLLARD R, READ J. A method for calibrating shipmounted acoustic Doppler profilers and the limitations of gyro compasses[J]. Journal of Atmospheric & Oceanographic Technology, 1989, 6(6): 859-865.
[39] MüNCHOW A, COUGHRAN C S, HENDERSHOTT M C, et al. Performance and calibration of an acoustic Doppler current profiler towed below the surface[J]. Journal of Atmospheric & Oceanic Technology, 1995, 12(5): 435-444.
[40] KINSEY J C, WHITCOMB L L. Adaptive identification on the group of rigid-body rotations and its application to underwater vehicle navigation[J]. IEEE Transactions on Robotics, 2007, 23(1): 124-136.
[41] KINSEY J C, WHITCOMB L L. In situ alignment calibration of attitude and doppler sensors for precision underwater vehicle navigation: theory and experiment[J]. IEEE Journal of Oceanic Engineering, 2007, 32(2): 286-299.
[42] TRONI G, WHITCOMB L L. New methods for in-situ calibration of attitude and Doppler sensors for underwater vehicle navigation: preliminary results[C]//The Institute of Electrical and Electronic Engineers (IEEE). Proceedings of Oceans 2010 MTS/IEEE SEATTLE. Seattle, USA: IEEE, 2010: 1-8.
[43] 朱春云, 莊廣琛, 宋雅蘭, 等. DVL安裝誤差角估計方法在水下組合導航系統中的應用[J].中國慣性技術學報, 2011, 19(1): 75-78.
[44] TANG K H, WANG J L, LI W L, et al. A novel INS and Doppler sensors calibration method for long range underwater vehicle navigation[J]. Sensors, 2013, 13(11): 14583-14600.
[45] LIU J Y, WANG B, DENG Z H. An online calibration method of INS and Doppler sensors[C]//The Institute of Electrical and Electronic Engineers (IEEE). Proceedings of the 16th International Bhurban Conference on Applied Sciences and Technology. Islamabad, Pakistan: IEEE, 2019: 824-829.
[46] PAN X F, WU Y X. Underwater Doppler navigation with self-calibration[J]. Journal of Navigation, 2016, 69(2): 295-312.
[47] LI W L, ZHANG L D, SUN F P, et al. Alignment calibration of IMU and Doppler sensors for precision INS/DVL integrated navigation[J]. Optik-international Journal for Light and Electron Optics, 2015, 126(23): 3872-3876.
[48] JALVING B, GADE K, SVARTVEIT K, et al. DVL velocity aiding in the HUGIN 1000 integrated inertial navigation system[J]. Modeling Identification & Control, 2004, 25(4): 223-235.
[49] LIU P J, WANG B, DENG Z H, et al. A correction method for DVL measurement errors by pitch dynamics[C]//The Institute of Electrical and Electronic Engineers (IEEE). Proceedings of the 24th Saint Petersburg International Conference on Integrated Navigation Systems. St. Petersburg, Russia: IEEE, 2017: 143-147.
[50] LIU P J, WANG B, DENG Z H, et al. A correction method for DVL measurement errors by attitude dynamics[J]. IEEE Sensors Journal, 2017, 17(14): 4628-4638.
[51] CHANG L B, LI Y, XUE B Y. Initial alignment for Doppler velocity log aided strapdown inertial navigation system with limited information[J]. IEEE/ASME Transactions on Mechatronics, 2017, 22(1): 329-338.
[52] WANG Q Y, LI Y B, DIAO M, et al. Moving base alignment of a fiber optic gyro inertial navigation system for autonomous underwater vehicle using doppler velocity log[J]. Optik-international Journal for Light and Electron Optics, 2015, 126(23): 3631-3637.
[53] LI W L, WANG J L, LU L Q, et al. A novel scheme for DVL-aided SINS in-motion alignment using UKF techniques[J]. Sensors, 2013, 13(1): 1046.
[54] 秦永元, 嚴恭敏, 顧冬晴,等.搖擺基座上基于信息的捷聯慣導粗對準研究[J]. 西北工業大學學報, 2005, 23(5): 140-143.
[55] GU D, EL-SHEIMY N, HASSAN T, et al. Coarse alignment for marine SINS using gravity in the inertial frame as a reference[C]//The Institute of Electrical and Electronic Engineers (IEEE). Proceedings of 2008 IEEE/ION Position, Location and Navigation Symposium. Monterey, USA: IEEE, 2008: 961-965.
[56] WU M P, WU Y X, HU X P, et al. Optimization-based alignment for inertial navigation systems: theory and algorithm[J]. Aerospace Science and Technology, 2011, 15(1): 1-17.
[57] SILSON P M G. Coarse alignment of a ship’s strapdown inertial attitude reference system using velocity loci[J]. IEEE Transactions on Instrumentation and Measurement, 2011, 60(6): 1930-1941.
[58] 李萬里.慣性/多普勒組合導航回溯算法研究[D].長沙: 國防科學技術大學, 2013.
A review of SINS/DVL integrated navigation technology
WANG Bo, LIU Jingyang, LIU Peijia
(School of Automation, Beijing Institute of Techology, Beijing 100081, China)
In order to further study on the technology of underwater navigation, the paper expounded the SINS/DVL integrated navigation technology which is popularly utilized in AUV navigation: the characteristics of complete independence, autonomy, concealment and high precision were introduced; and the application and research status of the key technology of SINS/DVL integrated system were given, including multi-source information filter fusion technology, error calibration technology and initial alignment technology; finally the future research hotspots of underwater SINS/DVL integrated navigation technology were discussed.
inertial navigation system; Doppler velocity log; multi-source filter fusion; error calibration; initial alignment
P228
A
2095-4999(2020)03-0001-06
王博,劉涇洋,劉沛佳. SINS/DVL組合導航技術綜述[J]. 導航定位學報, 2020, 8(3): 1-6.(WANG Bo,LIU Jingyang, LIU Peijia. A review of SINS/DVL integrated navigation technology[J]. Journal of Navigation and Positioning, 2020, 8(3): 1-6.)
10.16547/j.cnki.10-1096.20200301.
2020-01-19
王博(1982—),男,河南開封人,博士,副教授,博士生導師,研究方向為水下重力匹配導航、組合導航。
猜你喜歡
兒童故事畫報(2019年5期)2019-05-26 14:26:14
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
Coco薇(2016年2期)2016-03-22 02:42:52
電源技術(2016年9期)2016-02-27 09:05:39
電源技術(2015年1期)2015-08-22 11:16:28
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
電測與儀表(2015年24期)2015-04-09 12:04:36