改進蟻群算法在海洋信標回收中的應用
2020-06-15 06:13:22林恩凡許江寧
導航定位學報 2020年3期
林恩凡,許江寧,安 文
改進蟻群算法在海洋信標回收中的應用
林恩凡,許江寧,安 文
(海軍工程大學 電氣工程學院,武漢 430033)
針對現有海洋信標的回收主要借助于經驗或基于人工判斷,導致浪費大量人力物力的問題,提出1種基于精英蟻群算法的信標回收方法:介紹蟻群算法模型,并在改進的精英蟻群算法基礎上,根據航跡運動方程對航跡進行優化;然后通過實現航行器的自治或半自治的航跡規劃,應用到海洋信標的回收中。實驗結果表明:與傳統算法相比,該算法具有路徑短、收斂快、航跡平滑等優點,能有效指導航行器的定位,可以滿足針對海洋信標回收的航跡規劃的要求。
海洋信標;信標回收;航跡規劃;精英蟻群算法;航跡優化
0 引言
海洋信標作為1種重要的海洋探測設備,通常搭載集成著很多造價昂貴的儀器儀表,能夠廣泛地應用到海洋測繪、船舶導航以及其他海洋研究中;不論是潛標還是浮標,其布放與回收都會耗費大量的人力物力[1-4]。針對信標的回收問題,研究合適的算法進行航跡規劃,能夠提高海洋信標的回收效率,節省大量人力物力。
航跡規劃是按照一定的方法和評價標準,去尋找1條或多條從起始狀態到目標狀態的最佳路徑[5-9]。主要環節包括環境建模、航跡搜索和生成、航跡優化和平滑3個部分。
文獻[1]設計并建立了南海浮標管理信息系統;文獻[2]對沿海和近海的海洋浮標拋投與回收方式、作業方式進行了論述;文獻[3-4]基于北斗衛星導航系統(BeiDou navigation satellite system, BDS),研究了信標回收的機制;文獻[10-12]對浮標、潛標的回收機制和搜尋定位設備進行了研究。目前針對海洋信標回收的研究主要集中在設備、拋投與回收方式、信標布放位置信息的管理,而在信標回收的問題上,往往借助經驗或者基于人工判斷去規劃回收,這會浪費大量的人力物力。針對該問題,本文提出1種基于精英蟻群算法的航跡規劃方法,并根據航跡運動方程對航跡進行了優化平滑。
1 算法數學模型

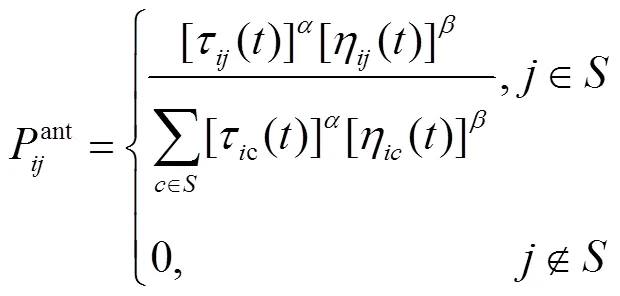


螞蟻ant在信標與信標之間釋放的信息素濃度模型為

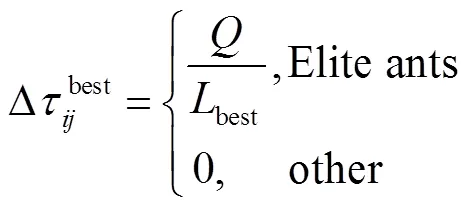
2 改進精英蟻群算法
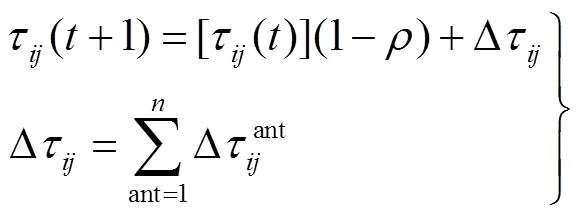
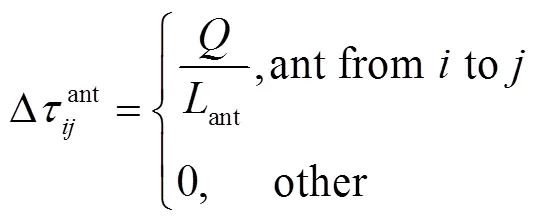
在傳統蟻群算法中,當所有的螞蟻都經歷完1次迭代后,才會更新信息素,所有螞蟻的信息素都會參與到信息素的更新中,這會導致某些尋找到非常長路徑的螞蟻,對整個蟻群的路徑搜索產生誤導,導致算法收斂速度變慢,甚至影響路徑的最終收斂值。精英蟻群算法是在傳統蟻群算法上,對信息素分配機制進行改進,將每次迭代搜索中,搜索出的最短路徑對應螞蟻的信息素給予額外增強,對行程加權,這有助于算法收斂[15]。
改進模型為:

規劃的航跡中,通常會出現大角度直接轉向航跡,這種折線航跡對低速與零轉向半徑的航行器而言可以使用;而實際上,大型船舶在轉向過程中,其航跡絕不允許出現大角度折線的[16]。所以需要對精英蟻群算法規劃出的航跡進行優化,以避免折線出現,如圖1所示,經過優化平滑后的航跡更適用于航行器的運動。
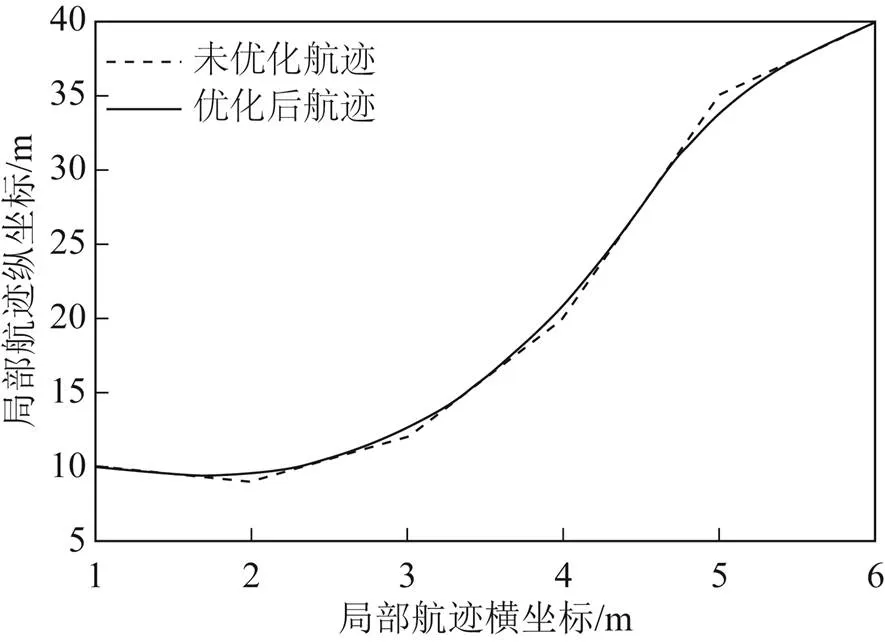
圖1 航跡優化原理
圖2給出了本文提出的改進蟻群算法的運行流程。
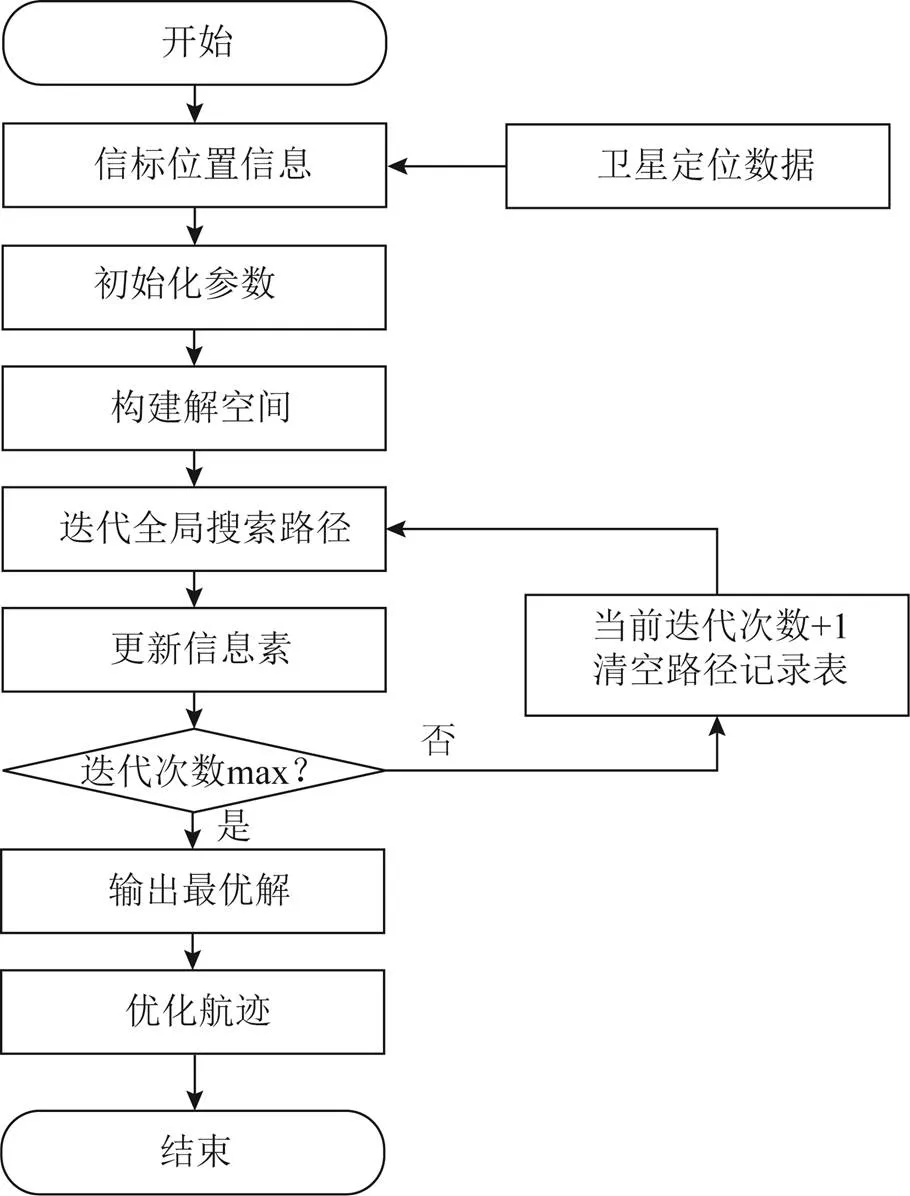
圖2 算法步驟
運用改進蟻群算法進行海洋信標回收的流程為:
1)通過衛星定位數據進行海洋信標位置的鍵入,構建環境空間;
2)初始化蟻群算法相關參數;
3)構建蟻群算法的解空間,包括所有路徑、起始點、終點等;
4)執行算法,搜索最優路徑,并記錄螞蟻的信息素濃度;
5)根據公式更新螞蟻的信息素,并進行局部搜索判斷是否達到目的;
6)判斷迭代次數是否達到初始參數預設,若達到則輸出最優解,若否,返回4);
7)根據最優解的航跡運動方程,進行航跡的優化。
3 實驗與結果
仿真實驗在20 m×20 m的范圍內隨機生成20個模擬信標點,且盡可能保證分布不均勻和有較多路徑選擇。設算法中螞蟻數量為40,信息素重要程度為1,啟發函數重要程度因子為5,信息素的揮發程度參數為0.1;預設常數為1,迭代次數為100。仿真在Windows 8.1系統、MATLAB2014b、Intel Core i5-4200H CPU2.80GHZ(2CPUs)、內存8 GB、64位操作系統環境下進行。
圖3、圖4分別給出了傳統蟻群算法航跡規劃結果和本文改進蟻群算法航跡規劃結果。本文算法和傳統算法的最短路徑長度分別為84.0764和87.1685 m,在如圖3、圖4所示的場景下可優化3.0921 m的距離。改進算法最短路徑:14→5→12→11→10→13→9→8→6→7→18→17→15→16→19→20→3→ 2→4→1→14,傳統算法最短路徑:19→16→17→15→12→11→10→13→9→8→6→ 7→18→20→3→ 2→ 4→14→ 5→1→19,有效避免重疊路徑的出現。圖5給出了改進算法和傳統算法路徑距離與迭代次數關系。
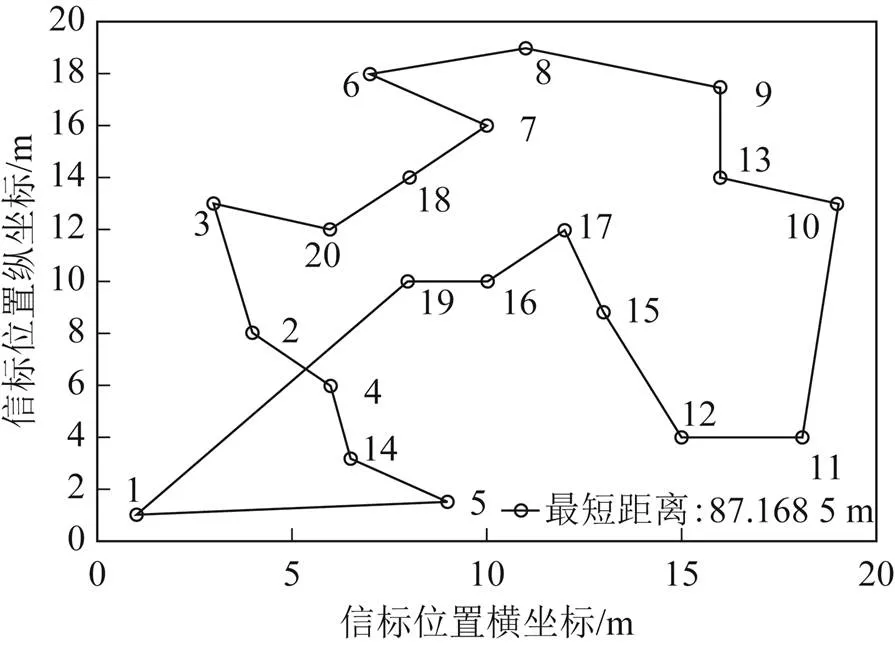
圖3 傳統算法仿真結果
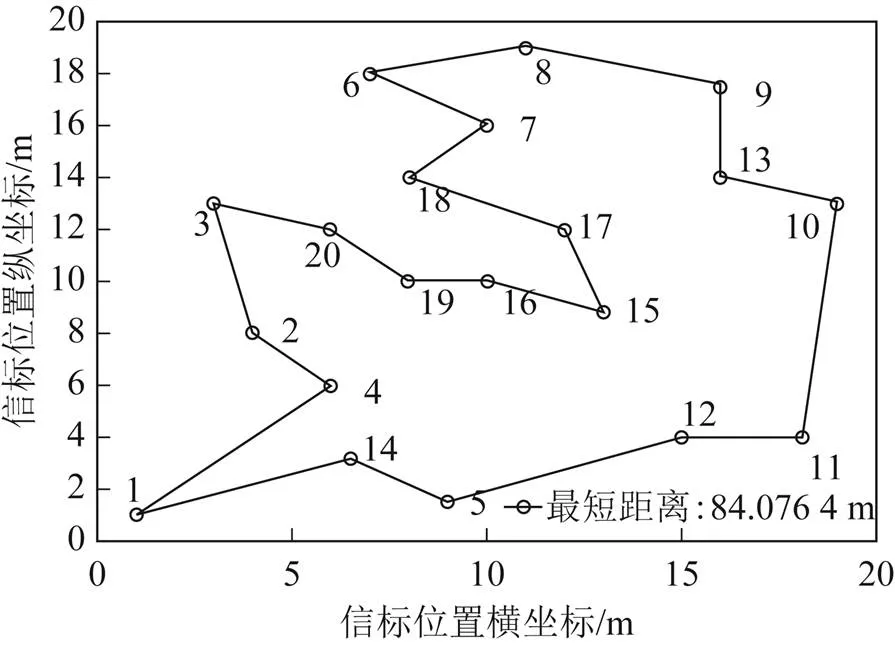
圖4 改進算法仿真結果
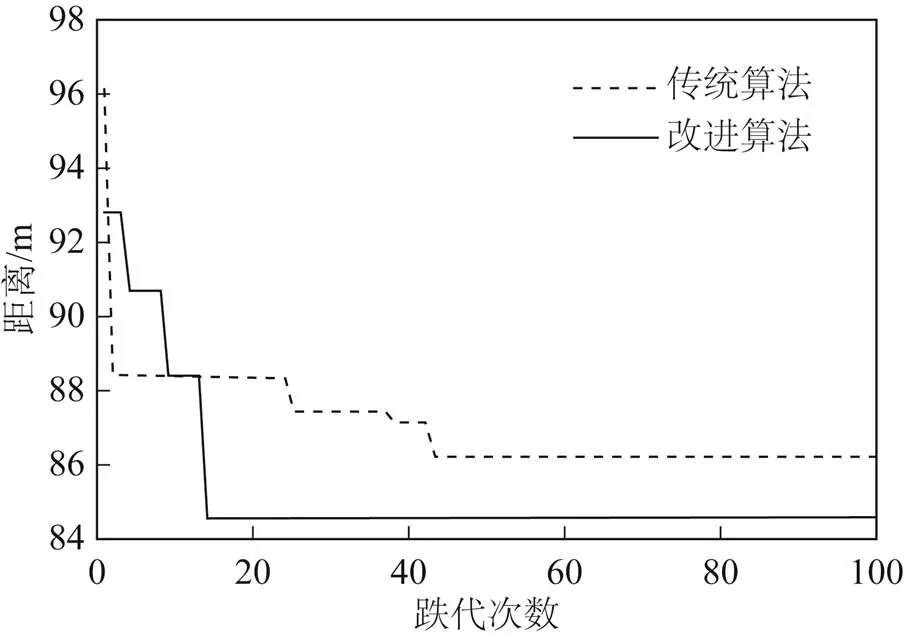
圖5 迭代對比結果
從圖5可以看出,傳統算法和改進算法收斂時的迭代次數分別為14和42,在百次迭代情況下,改進算法的收斂速度對比傳統算法的收斂速度可提升百分之66 %。綜合圖3~圖5的實驗結果可以看出,本文算法相對于傳統算法的航跡規劃結果,在路徑長度和迭代收斂速度上都具有明顯優勢。規劃航跡進行優化平滑后的結果如圖6所示。對比圖6和圖4可以看出,優化后路徑幾乎沒有折線路徑出現,更適合航行器的實際航行。
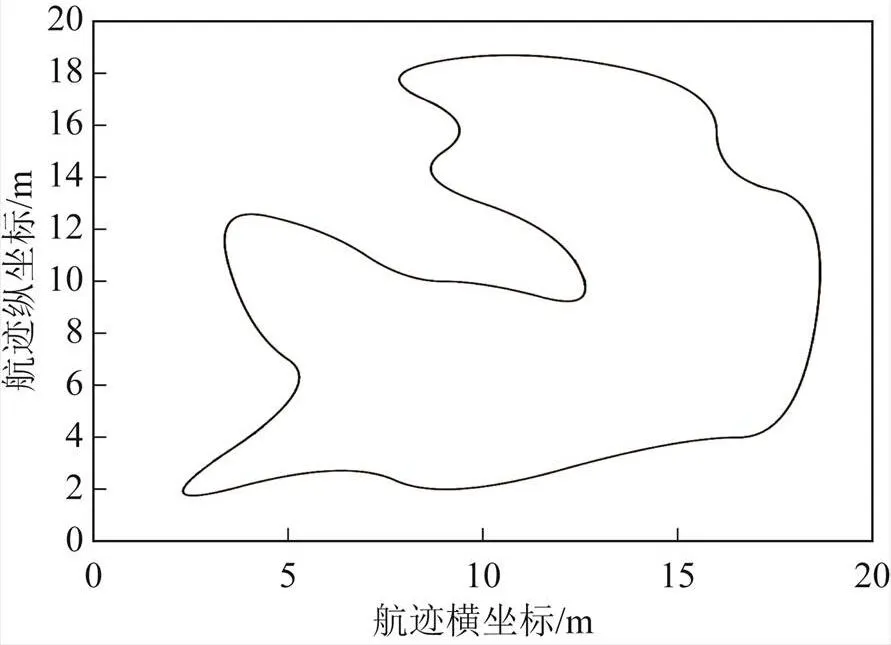
圖6 優化后的路徑
以上分析表明,本文提出的優化路徑的精英蟻群算法,可以有效地提高海洋信標布放和回收的效率。
4 結束語
本文為彌補海洋信標布放和回收的全局規劃不足,提出利用優化路徑的改進精英蟻群算法進行航跡規劃,通過分析傳統蟻群算法的數學模型和航跡模型后,提出相應的改進方案:通過引入“精英螞蟻”這一概念,優化了信息素更新策略,改進了航跡運動方程,這使得航跡更平滑,更適合航行器的實際航行。仿真實驗表明:該方法具有較強的穩定性,可以滿足海洋信標布放與回收航跡規劃的要求,能有效地指導航行器的導航與定位。
[1] 周保成, 張金尚, 王研, 等. 南海浮標管理信息系統的設計與實現[J]. 科技風, 2019, 32(24): 100.
[2] 董林根. 淺談大型海洋浮標拋設回收作業[J]. 珠江水運, 2012(19): 83-85.
[3] 張鵬鵬. 基于北斗通信與定位的深海回收信標系統研制[D]. 杭州: 杭州電子科技大學, 2018.
[4] 張炳洋. 北斗衛星定位系統在海洋信標回收中的應用[C]//中國高科技產業化研究會智能信息處理產業化分會、中國高科技產業化研究會信號處理專家委員會. 第十一屆全國信號和智能信息處理與應用學術會議專刊. 北京: 中國高科技產業化研究會, 2017: 249-252.
[5] 劉潮東. 水下信號處理與航行器路徑規劃方法[D]. 西安: 西北工業大學, 2006.
[6] TAN L, JIANG J. Adaptive volterra filters for active control of nonlinear noise processes[J]. IEEE Transactions on Signal Processing, 2001, 49(8):1667-1676.
[7] SUN X, KUO S M, MENG G. Adaptive filtering of stable processes for active attenuation of impulsive noise[C]//The Institute of Electrical and Electronic Engineers(IEEE). Proceedings of 1995 International Conference on Acoustics, Speech, and Signal Processing(ICASSP-95). Detroit, Michigan: IEEE, 1995: 26-32.
[8] WU L, HE H, QIU X. An active impulsive noise control algorithm with logarithmic transformation[J]. IEEE Transactions on Audio, Speech and Language Processing, 2011, 19(4):1041-1044.
[9] LU L, ZHAO H. Adaptive volterra filter with continuous lp-normusing a logarithmic cost for nonlinear active noise control[J]. Journal of Sound and Vibration, 2016, 364: 14-29.
[10] 王瑛. 基于STM8L的潛水信標水面無線搜尋裝置的設計[C]//中國高科技產業化研究會智能信息處理產業化
分會. 第九屆全國信號和智能信息處理與應用學術會議專刊. 北京: 中國高科技產業化研究會, 2015: 172-175.
[11] 侯彬, 曾釹釙, 高劍, 等. 信號浮標布放回收裝置研制[J]. 機械與電子, 2014(6): 72-75.
[12] 周光輝. 深海設備回收無線信標機研制[D]. 杭州: 杭州電子科技大學, 2014.
[13] 司守奎, 孫璽菁. 數學建模算法與應用[M]. 北京: 國防工業出版社, 2011.
[14] MARCO D, CHRISTIAN B. Ant colony optimization theory: a survey[J]. Theoretical Computer Science, 2005, 344(2/3): 243-278.
[15] 劉學芳, 曾國輝, 劉瑾. 基于改進蟻群算法的機器人路徑規劃算法[J]. 傳感器與微系統, 2019, 38(10): 129-131, 138.
[16] 榮少巍. 基于改進A*算法的水下航行器自主搜索航跡規劃[J]. 電子科技, 2015, 28(4): 17-19, 22.
Application of improved ant colony algorithm in ocean beacon recycling
LIN Enfan, XU Jiangning, AN Wen
(College of Electrical Engineering, Naval University of Engineering, Wuhan 430033, China)
Aiming at the problem that it is maily with help of experience or artificial judgment for current recovery of marine beacons, leading to a huge waste of manpower and material resources, the paper proposed a recovery method of marine beacons based on elite ant colony algorithm: the model of ant colony algorithm was introduced, and the track was optimized according to the track motion equation based on the modified elite ant colony algorithm; then the autonomous or semi-autonomous track layout of the aircraft was realized and applied to the recovery of marine beacons. Experimental result showed that the proposed method would have shorter path, faster convergence and smoother track than traditional methods, which could effectively guide the navigation and positioning of the aircraft, meeting the basic requirements of the track planning for marine beacon recycling.
marine beacon; beacon recycling; track planning; elite ant colony algorithm; track optimization
P228
A
2095-4999(2020)03-0053-05
林恩凡,許江寧,安文. 改進蟻群算法在海洋信標回收中的應用[J]. 導航定位學報, 2020, 8(3): 53-57.(LIN Enfan, XU Jiangning, AN Wen.Application of improved ant colony algorithm in ocean beacon recycling[J]. Journal of Navigation and Positioning, 2020, 8(3): 53-57.)
10.16547/j.cnki.10-1096.20200308.
2019-12-02
國家重點研發計劃項目(2016YFB0501700,2016YFB0501701);湖北省基金資助項目(2017CFC865)。
林恩凡(1997—),河北石家莊人,碩士研究生,研究方向為慣性導航技術。
許江寧(1964—),江西九江人,博士,教授,研究方向為慣性導航技術。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
公民與法治(2020年11期)2020-07-25 02:02:06
領導決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
中國衛生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41