進(jìn)離場(chǎng)交通流時(shí)距分布特征對(duì)比分析
2020-05-25 11:41:30趙元棣劉澤宇吳佳馨
科學(xué)技術(shù)與工程 2020年10期
關(guān)鍵詞:模型
趙元棣, 劉澤宇, 吳佳馨
(中國(guó)民航大學(xué)空中交通管理學(xué)院,天津 300300)
隨著中國(guó)航空運(yùn)輸量的持續(xù)增加,航班延誤已經(jīng)成為行業(yè)內(nèi)的一個(gè)普遍現(xiàn)象。為了更好地緩解航班延誤現(xiàn)象,近些年圍繞空域通行能力評(píng)估和空中交通流量管理的研究已經(jīng)成了熱點(diǎn)。空中交通流內(nèi)部具有尾隨關(guān)系的航空器微觀時(shí)距分布規(guī)律是聯(lián)系空域通行能力和空中交通流量的紐帶,也是進(jìn)行通行能力評(píng)估、實(shí)施科學(xué)流量管理、制定擁塞疏導(dǎo)預(yù)案的理論依據(jù),在空中交通領(lǐng)域中具有廣泛的應(yīng)用價(jià)值[1]。
相較于道路交通領(lǐng)域里車頭時(shí)距分布特征的研究[2-4],空中交通流微觀特性的研究起步較晚,研究成果主要是基于各類假設(shè)構(gòu)建的空中交通流模型。Menon等[5]基于元胞自動(dòng)機(jī)構(gòu)建空中交通流模型用來(lái)研究空中交通流狀態(tài)演變過(guò)程。張兆寧等[6]建立飛機(jī)飛行跟馳模型,并基于該模型實(shí)現(xiàn)了對(duì)空中交通流中具有尾隨關(guān)系航空器的縱向間隔的科學(xué)計(jì)算。王莉莉等[7]在此基礎(chǔ)上提出單層航路的微觀跟馳模型,從而建立了空中交通流航路流量模型。張洪海等[8-9]借鑒“刺激-反射”理論,構(gòu)建了終端區(qū)空中交通流廣義微觀跟馳模型,并將其應(yīng)用于進(jìn)場(chǎng)交通流相變規(guī)律及多機(jī)場(chǎng)終端區(qū)的空中交通流特性演變規(guī)律的研究中。然而,上述研究在模型構(gòu)建過(guò)程中都做了一定的假設(shè),忽略了包括管制員指揮、天氣環(huán)境變化等影響因素,難以真實(shí)反映空中交通的動(dòng)態(tài)特性。
通過(guò)實(shí)測(cè)航空器飛行軌跡數(shù)據(jù),分析進(jìn)離場(chǎng)交通流航空器的跟馳關(guān)系,自動(dòng)生成合適觀測(cè)點(diǎn),計(jì)算進(jìn)離場(chǎng)交通流時(shí)距,利用不同分布模型探究其分布特征并進(jìn)行對(duì)比分析,為空中交通流態(tài)勢(shì)識(shí)別和空中交通運(yùn)行狀況評(píng)估提供了新方法和新思路。
1 空中交通流時(shí)距計(jì)算
1.1 飛行軌跡數(shù)據(jù)處理
選取國(guó)中某機(jī)場(chǎng)的實(shí)測(cè)飛行軌跡數(shù)據(jù)作為研究對(duì)象。其中每條數(shù)據(jù)包括時(shí)間、X坐標(biāo)、Y坐標(biāo)、高度、航向等信息,如表1所示。需要說(shuō)明的是,X坐標(biāo)和Y坐標(biāo)都是建立在以機(jī)場(chǎng)基準(zhǔn)點(diǎn)為坐標(biāo)原點(diǎn)的直角坐標(biāo)系中。
通過(guò)對(duì)飛行軌跡數(shù)據(jù)進(jìn)行線性插值,可以得到航空器在每秒鐘的X坐標(biāo)、Y坐標(biāo)、高度和航向信息。對(duì)使用同一跑道進(jìn)離場(chǎng)的航空器飛行軌跡數(shù)據(jù)進(jìn)行篩選和去噪處理,得到該機(jī)場(chǎng)的進(jìn)離場(chǎng)交通流數(shù)據(jù),如圖1所示。
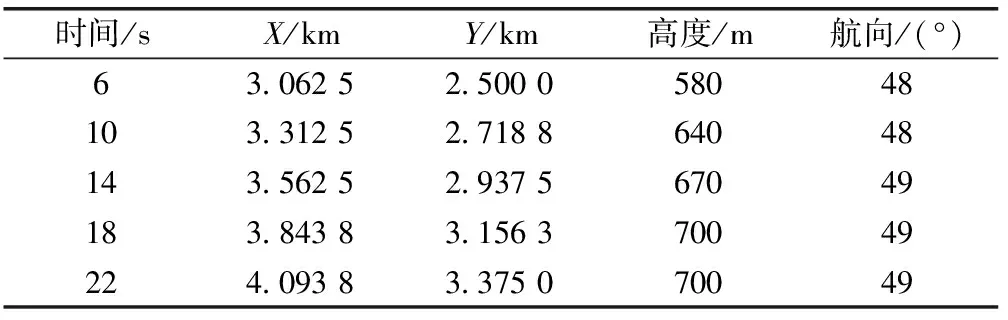
表1 飛行軌跡數(shù)據(jù)

圖1 進(jìn)離場(chǎng)交通流軌跡
1.2 空中交通流時(shí)距
航空器跟馳行為是最基本的微觀駕駛行為,描述了在限制超越前方航空器的單向交通流中,相鄰飛機(jī)之間的相互作用。進(jìn)離場(chǎng)航空器在降落起飛過(guò)程中會(huì)嚴(yán)格地按照標(biāo)準(zhǔn)進(jìn)離場(chǎng)程序排序進(jìn)離場(chǎng),在跑道入口處附近具有嚴(yán)格的“前后機(jī)”跟馳關(guān)系,因此進(jìn)離場(chǎng)交通流具備良好的跟馳性。在此基礎(chǔ)上,空中交通流時(shí)距可以理解為沿同一條航路/航線飛行的前后航空器在通過(guò)航路/航線上同一點(diǎn)(即觀測(cè)點(diǎn))時(shí)的時(shí)間間隔。
1.3 觀測(cè)點(diǎn)自動(dòng)選取
觀測(cè)點(diǎn)的選取將直接影響到時(shí)距計(jì)算的結(jié)果。一方面,如果所選觀測(cè)點(diǎn)距離機(jī)場(chǎng)基準(zhǔn)點(diǎn)過(guò)近,將導(dǎo)致有效軌跡數(shù)據(jù)的損失;另一方面,如果所選觀測(cè)點(diǎn)距離機(jī)場(chǎng)基準(zhǔn)點(diǎn)過(guò)遠(yuǎn),一部分航空器已經(jīng)到達(dá)指定轉(zhuǎn)彎高度或指定點(diǎn),并開(kāi)始初始轉(zhuǎn)彎,此種情況下,會(huì)將不具備跟馳性的航空器數(shù)據(jù)計(jì)算在內(nèi),導(dǎo)致時(shí)距計(jì)算結(jié)果不準(zhǔn)確。
觀測(cè)點(diǎn)需要滿足以下兩個(gè)條件:觀測(cè)點(diǎn)應(yīng)該在通過(guò)機(jī)場(chǎng)基準(zhǔn)點(diǎn),沿跑道運(yùn)行方向延伸的一條射線上;觀測(cè)點(diǎn)距離機(jī)場(chǎng)基準(zhǔn)點(diǎn)的距離不能過(guò)大或者過(guò)小,應(yīng)在所有航空器的初始轉(zhuǎn)彎點(diǎn)之前,并無(wú)限接近于初始轉(zhuǎn)彎點(diǎn)。因此,根據(jù)上述條件,基于飛行軌跡數(shù)據(jù),提出了一種自動(dòng)選取觀測(cè)點(diǎn)的方法,旨在針對(duì)不斷變化的空中交通態(tài)勢(shì),自動(dòng)生成合適觀測(cè)點(diǎn)。
以使用05號(hào)跑道離場(chǎng)的飛行軌跡數(shù)據(jù)為例,首先利用航向信息計(jì)算每條離場(chǎng)軌跡的初始轉(zhuǎn)彎點(diǎn)。若某航空器離場(chǎng)軌跡數(shù)據(jù)中連續(xù)7個(gè)航向數(shù)據(jù)發(fā)生了連續(xù)遞增或連續(xù)遞減的變化,且其中第4個(gè)航向相對(duì)于第1個(gè)航向的改變量大于指定閾值ε(選取ε=40°),則判斷該點(diǎn)為初始轉(zhuǎn)彎點(diǎn)。用此方法提取所有軌跡的初始轉(zhuǎn)彎點(diǎn),并選取離機(jī)場(chǎng)基準(zhǔn)點(diǎn)最近的作為合適觀測(cè)點(diǎn),如圖2所示。
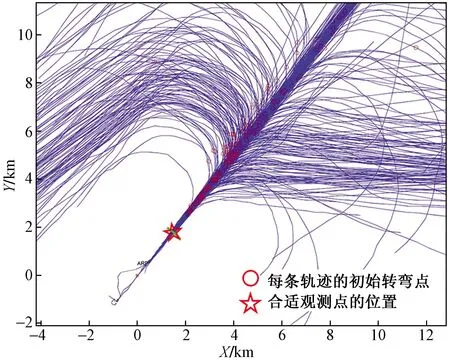
圖2 觀測(cè)點(diǎn)自動(dòng)選取
1.4 時(shí)距計(jì)算

(1)

2 空中交通流時(shí)距分布特征
2.1 離場(chǎng)交通流時(shí)距分布特征
以該機(jī)場(chǎng)某日離場(chǎng)飛行軌跡數(shù)據(jù)為例,通過(guò)上述方法自動(dòng)生成觀測(cè)點(diǎn)并計(jì)算出時(shí)距,該日共有68條離場(chǎng)軌跡,其頻率分布直方圖如圖3所示。
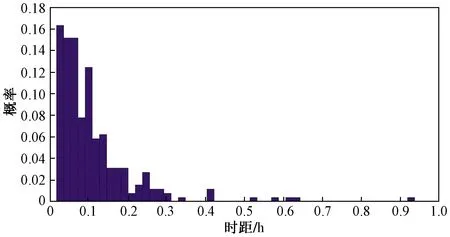
圖3 離場(chǎng)航空器時(shí)距頻率分布直方圖
根據(jù)離場(chǎng)航空器時(shí)距的統(tǒng)計(jì)分布特征,結(jié)合各擬合函數(shù)的適用性特點(diǎn),分別利用有理函數(shù)模型、光滑樣條模型和韋布爾模型[10]對(duì)頻率分布數(shù)據(jù)進(jìn)行曲線擬合。其中,有理函數(shù)是通過(guò)多項(xiàng)式的加減乘除得到的函數(shù),即:
(2)
式(2)中:m和n分別為分子和分母多項(xiàng)式的次數(shù),本文中m=1,n=2。
樣條是指分段定義的多項(xiàng)式,可表示為一組樣條基函數(shù)的線性組合,即:
(3)
式(3)中:Pi為控制點(diǎn);bi,n(x)為n次樣條基函數(shù),取n=2。
韋布爾分布是連續(xù)性的概率分布,其概率密度為
(4)
式(4)中:x是隨機(jī)變量;α>0是比例參數(shù);β>0是形狀參數(shù)。
三種分布模型的擬合結(jié)果如圖4所示,其中紅色、綠色和藍(lán)色曲線分別為韋布爾、光滑樣條和有理函數(shù)模型擬合結(jié)果。不難發(fā)現(xiàn),有理函數(shù)模型優(yōu)于光滑樣條模型,光滑樣條模型優(yōu)于韋布爾模型。
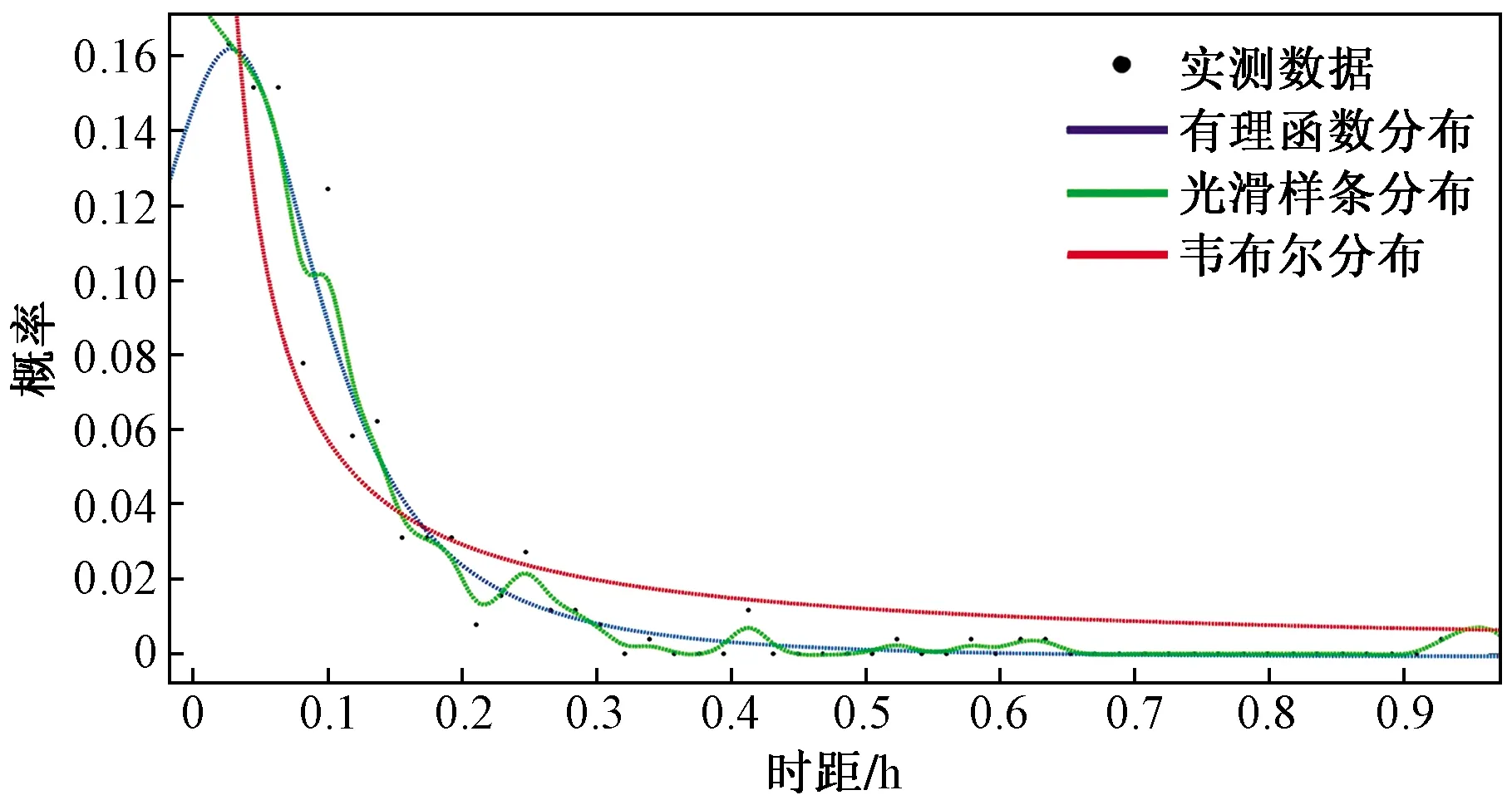
圖4 三種分布模型擬合結(jié)果

(5)
通過(guò)計(jì)算可知,有理函數(shù)、光滑樣條和韋布爾模型對(duì)應(yīng)的RMSE分別為0.018 27、0.101 85和0.019 95。由此可知,針對(duì)該日離場(chǎng)航空器時(shí)距分布,有理函數(shù)的擬合效果最佳。
為了進(jìn)一步挖掘離場(chǎng)交通流分布特征,選取該機(jī)場(chǎng)連續(xù)10 d的軌跡數(shù)據(jù)進(jìn)行上述實(shí)驗(yàn),結(jié)果如表2所示。
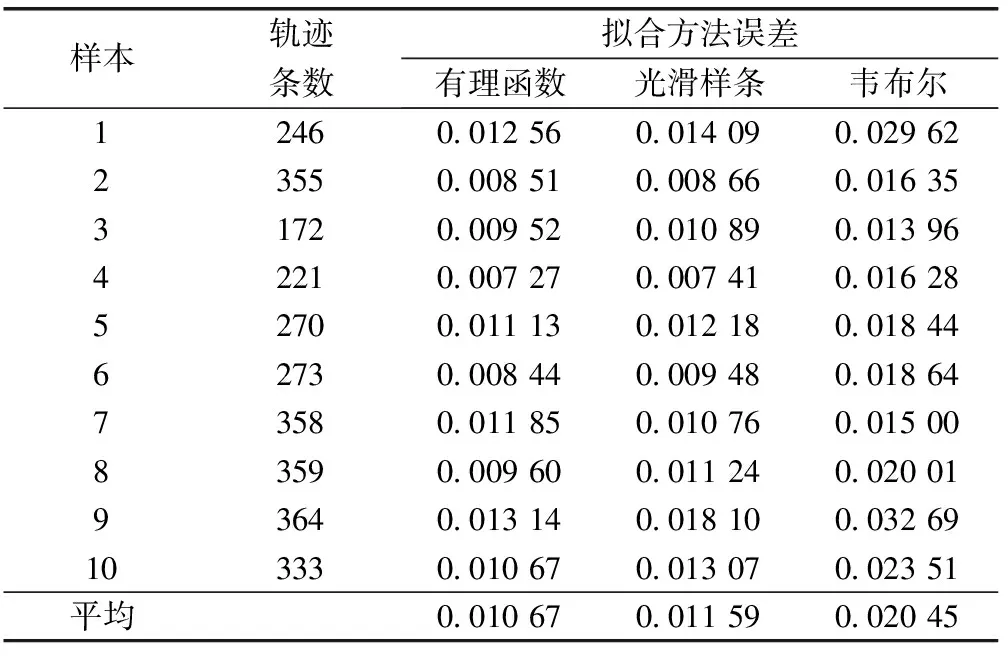
表2 離場(chǎng)航空器時(shí)距的擬合結(jié)果對(duì)比
由此可知,對(duì)于10組實(shí)驗(yàn)樣本數(shù)據(jù),有理函數(shù)、光滑樣條和韋布爾模型的評(píng)價(jià)指標(biāo)RMSE的平均值分別為0.010 67、0.011 59和0.020 45,與單日擬合評(píng)價(jià)結(jié)果一致,有理函數(shù)仍為最佳擬合模型。從微觀角度來(lái)看,有9組樣本數(shù)據(jù)都滿足有理函數(shù)模型的RMSE小于光滑樣條模型,而光滑樣條模型的RMSE又小于韋布爾模型。因此可以得到一般性規(guī)律:對(duì)離場(chǎng)交通流時(shí)距分布,有理函數(shù)模型擬合效果較好,光滑樣條模型次之,韋布爾模型擬合效果較差。
提取樣本7中數(shù)據(jù),擬合效果如圖5所示,可以看出,當(dāng)天離場(chǎng)航空器時(shí)距總體偏大,且時(shí)距分布具有較強(qiáng)的不規(guī)律性,說(shuō)明當(dāng)天該機(jī)場(chǎng)發(fā)生了大面積延誤,使得有理函數(shù)模型的擬合效果不如光滑樣條模型。另外,光滑樣條模型擬合的曲線在區(qū)間[0,0.3]內(nèi)存在多個(gè)峰值,峰值所對(duì)應(yīng)的離場(chǎng)航空器時(shí)距分別為2、4、8、10、15 min。分析“多峰”形狀發(fā)生的原因,前兩個(gè)波峰對(duì)應(yīng)航空器離場(chǎng)時(shí)標(biāo)準(zhǔn)的放行間隔,而后面幾個(gè)波峰對(duì)應(yīng)流量控制的實(shí)施標(biāo)準(zhǔn)。
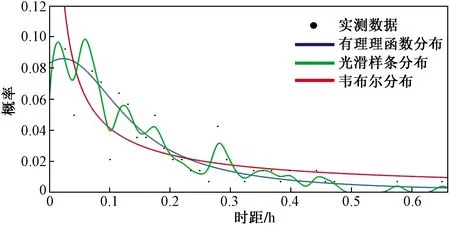
圖5 三種分布模型擬合樣本7結(jié)果
為了充分分析有理函數(shù)的擬合效果,利用有理函數(shù)模型分別擬合10組樣本中軌跡數(shù)據(jù)的時(shí)距分布,如圖6所示。不難發(fā)現(xiàn),在該機(jī)場(chǎng)正常運(yùn)行時(shí),擬合曲線的頂點(diǎn)落在區(qū)間[0,0.1]內(nèi),且曲線具有明顯的波峰;而紅色曲線沒(méi)有明顯的頂點(diǎn),且曲線整體較為平緩。
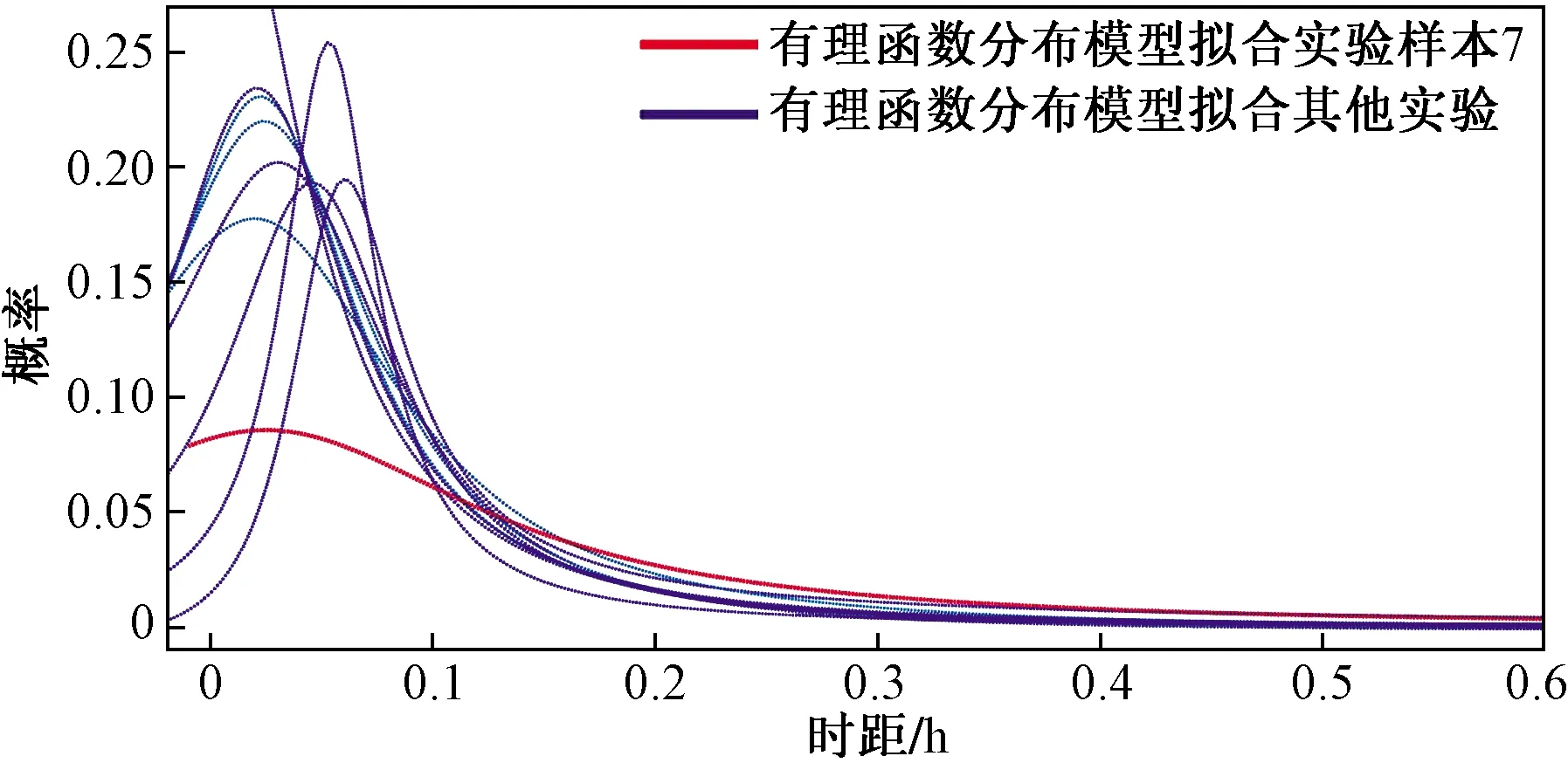
圖6 有理函數(shù)模型擬合結(jié)果
綜上,可以得出結(jié)論:在機(jī)場(chǎng)運(yùn)行正常情況下,有理函數(shù)模型能較好地刻畫(huà)該機(jī)場(chǎng)離場(chǎng)交通流時(shí)距分布情況;當(dāng)機(jī)場(chǎng)出現(xiàn)惡劣天氣、流量控制、設(shè)備故障等原因造成的航班大面積延誤時(shí),有理函數(shù)模型所刻畫(huà)的曲線變得平緩,這時(shí)光滑樣條模型的分段擬合能力將更為重要,擬合效果更佳。
2.2 離場(chǎng)交通流時(shí)距參數(shù)分析
為了探究有理函數(shù)模型中各參數(shù)隨著離場(chǎng)交通流態(tài)勢(shì)變化而變化的規(guī)律,在上述研究基礎(chǔ)上,提取10組樣本的有理函數(shù)模型擬合結(jié)果中各個(gè)參數(shù)a1、a0、b1、b0的值,如表3所示。
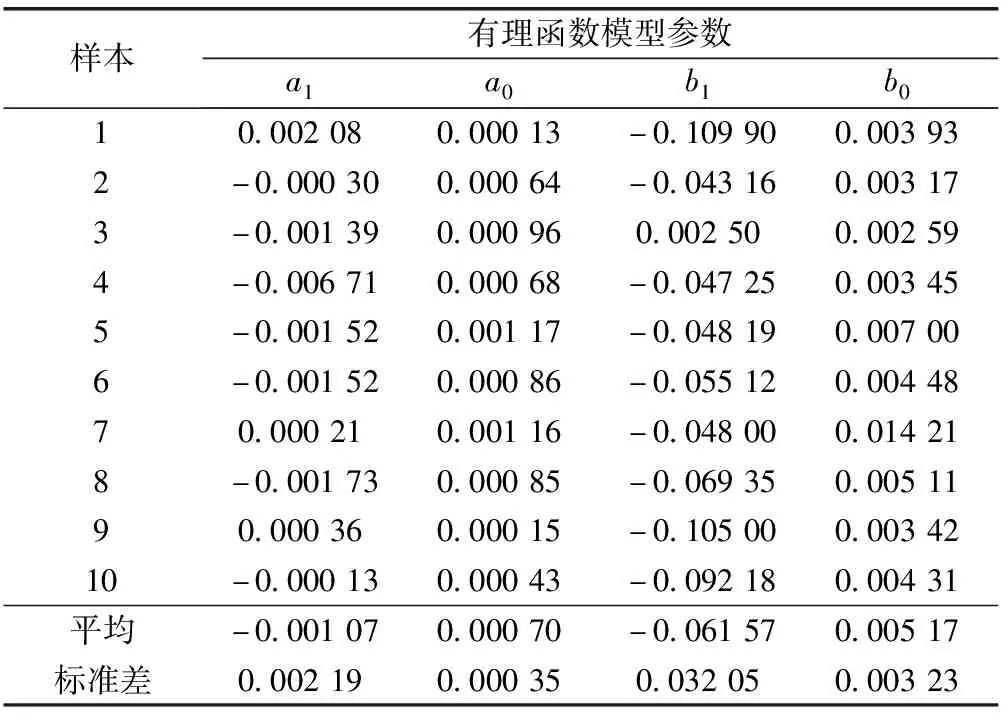
表3 有理函數(shù)模型參數(shù)對(duì)比
注:a1為分子中一次項(xiàng)的系數(shù),a0為分子中常數(shù)項(xiàng)的值,b1為分母中一次項(xiàng)的系數(shù),b0為分母中常數(shù)項(xiàng)的值。
由表3可知,有理函數(shù)模型中每個(gè)參數(shù)值的標(biāo)準(zhǔn)差均小于0.05,說(shuō)明參數(shù)值分布較為集中、波動(dòng)較小,進(jìn)一步說(shuō)明有理函數(shù)模型能較好地刻畫(huà)該機(jī)場(chǎng)離場(chǎng)航空器時(shí)距分布情況。
2.3 進(jìn)場(chǎng)交通流時(shí)距分布特征
類似的,采用前文方法可以計(jì)算該機(jī)場(chǎng)進(jìn)場(chǎng)交通流時(shí)距分布,選取該機(jī)場(chǎng)連續(xù)6d的進(jìn)場(chǎng)軌跡數(shù)據(jù)作為實(shí)驗(yàn)樣本,并利用三種模型進(jìn)行曲線擬合,采用RMSE作為評(píng)價(jià)指標(biāo),結(jié)果如表4所示。

表4 進(jìn)場(chǎng)航空器時(shí)距的擬合結(jié)果對(duì)比
由6組實(shí)驗(yàn)樣本擬合結(jié)果RMSE的平均值顯示,光滑樣條模型的擬合效果優(yōu)于有理函數(shù)模型,而韋布爾模型的擬合效果較差。具體來(lái)看,6組實(shí)驗(yàn)樣本中有5組都滿足這一規(guī)律,只有樣本3例外,此時(shí)有理函數(shù)模型的擬合效果優(yōu)于光滑樣條模型。
為了充分分析光滑樣條函數(shù)的擬合效果,利用光滑樣條模型分別擬合6組樣本中軌跡數(shù)據(jù)的時(shí)距分布,結(jié)果如圖7所示。可以看出,紅色曲線的峰值相比于5條綠色曲線的峰值小,原因是當(dāng)天該機(jī)場(chǎng)遭遇了一定程度的航班延誤。
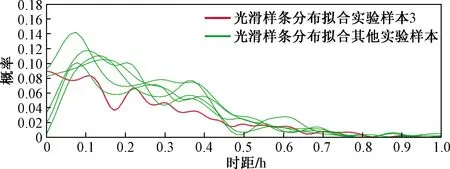
圖7 光滑樣條函數(shù)模型擬合結(jié)果
綜上,可以得出結(jié)論:對(duì)于進(jìn)場(chǎng)交通流時(shí)距,在機(jī)場(chǎng)運(yùn)行正常情況下,光滑樣條模型的擬合效果優(yōu)于有理函數(shù)模型,而韋布爾模型的擬合效果較差。
2.4 進(jìn)離場(chǎng)交通流時(shí)距分布特征對(duì)比
將10組離場(chǎng)軌跡數(shù)據(jù)和6組進(jìn)場(chǎng)軌跡數(shù)據(jù)分別匯總,計(jì)算三種模型對(duì)進(jìn)離場(chǎng)交通流時(shí)距分布擬合結(jié)果的RMSE平均值,如表5所示。
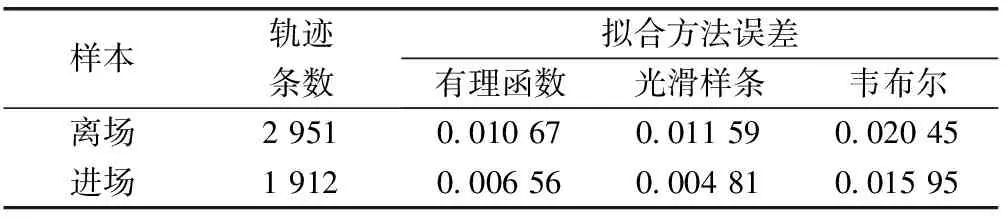
表5 進(jìn)離場(chǎng)交通流時(shí)距分布對(duì)比
結(jié)果顯示,三種模型對(duì)進(jìn)場(chǎng)交通流時(shí)距分布的擬合效果均優(yōu)于對(duì)離場(chǎng)交通流時(shí)距分布的擬合效果。這說(shuō)明進(jìn)場(chǎng)交通流時(shí)距分布相較于離場(chǎng)交通流時(shí)距分布,離散程度較小,時(shí)距分布更有規(guī)律性。分析其原因,包括以下原因。
(1)該機(jī)場(chǎng)在進(jìn)場(chǎng)時(shí)實(shí)施標(biāo)準(zhǔn)儀表進(jìn)近程序和雷達(dá)引導(dǎo)相結(jié)合的進(jìn)近方式,通常在五邊附近,進(jìn)近管制員會(huì)對(duì)航空器進(jìn)行排序。因此,相對(duì)于離場(chǎng)交通流,進(jìn)場(chǎng)交通流具備更強(qiáng)的跟馳性。
(2)航空器起飛后,上升到100 m(夜間150 m)時(shí),塔臺(tái)管制員會(huì)將其移交給進(jìn)近管制員,航空器會(huì)在進(jìn)近管制員的指引下按照標(biāo)準(zhǔn)儀表離場(chǎng)程序離場(chǎng)或者做出相應(yīng)的機(jī)動(dòng)動(dòng)作,使得離場(chǎng)航空器的跟馳性減弱。
(3)離場(chǎng)交通流包含一部分復(fù)飛航空器,復(fù)飛航空器與其前后的正常起飛航空器之間的跟馳關(guān)系較差,弱于兩架起飛航空器之間的跟馳關(guān)系。
3 結(jié)論
基于某機(jī)場(chǎng)實(shí)測(cè)軌跡數(shù)據(jù),利用三種模型分別對(duì)進(jìn)離場(chǎng)交通流時(shí)距分布特征進(jìn)行對(duì)比分析,得到以下結(jié)論。
(1)機(jī)場(chǎng)運(yùn)行狀態(tài)正常時(shí),光滑樣條模型對(duì)進(jìn)場(chǎng)交通流時(shí)距分布的擬合效果優(yōu)于有理函數(shù)模型,韋布爾模型的擬合效果較差;有理函數(shù)模型對(duì)離場(chǎng)交通流時(shí)距分布的擬合效果優(yōu)于光滑樣條模型,韋布爾模型的擬合效果較差。
(2)機(jī)場(chǎng)運(yùn)行狀態(tài)不佳時(shí),進(jìn)離場(chǎng)時(shí)距分布特征不符合上述規(guī)律,是由于流量控制、惡劣天氣、突發(fā)事件等情況導(dǎo)致機(jī)場(chǎng)產(chǎn)生不同程度的航班延誤。
(3)進(jìn)場(chǎng)交通流時(shí)距分布相較于離場(chǎng)交通流時(shí)距分布特征更明顯,更有規(guī)律性。
研究的對(duì)象為固定機(jī)場(chǎng),研究結(jié)果對(duì)于不同吞吐量的其他機(jī)場(chǎng)是否具有普適性需要進(jìn)一步驗(yàn)證,此外如何利用分段擬合的方法減小擬合誤差也是未來(lái)的研究方向之一。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
