高分辨力遙感相機CCD采樣位置自適應補償技術
2020-05-10 03:04:38孫雪晨呂恒毅薛旭成石俊霞
光學精密工程 2020年4期
孫雪晨,呂恒毅,薛旭成,石俊霞,傅 瑤
(中國科學院 長春光學精密機械與物理研究所,吉林 長春 130033)
1 引 言
信噪比、動態范圍等是空間光學相機設計[1-3]的重要指標,用于表征相機的輻射性能和評價相機圖像品質。空間遙感相機電子學系統的性能,會極大程度的影響整個成像系統的成像質量[4]、信噪比[5]和動態范圍等。在航天應用中,通常對CCD信號進行相關雙采樣(Correlated Double Sample,CDS)處理,這樣可以消除復位噪聲的干擾,對低頻噪聲也有抑制作用,可以顯著改善信噪比,提高信號檢測精度[6-7]。
為了使相關雙采樣信號(SHP,SHD)位置[8]與CCD信號最佳位置對準,通常會在地面實驗階段選取最佳的采樣位置,進行固化。但是由于空間環境溫度的大范圍變化,成像電路的器件會受到溫度[9]的影響而產生時序上的延時,從而導致采樣位置的不準確。為了解決采樣位置受到溫度的影響而造成的圖像質量下降,曲利新[10]提出將CCD驅動器的輸出信號進行分壓整形,以此作為采樣信號SHP與SHD的基準,去除CCD驅動器件受溫度影響后的延時,提高采樣信號與CCD信號之間相位的穩定性。在航天應用上,CCD驅動信號種類很多,占空比與采樣信號不一致,需要的整形電路過于復雜且難于實現,新加入的電路也會帶來新的溫度延時效應;而且通過RC(Resistor-Capacitance)電路來調整延遲,精度不足。潘衛軍[11]提出對CCD信號采樣位置進行自適應調整,實時監測CCD信號的相位變化,在線調整采樣時鐘相位來保證采樣位置,其采樣信號的選取依舊利用CCD驅動信號進行分壓整形,帶來了與上述同樣的問題。
針對以上問題,本文首先對造成溫度延時的鏈路進行分析,提出高分辨力遙感相機CCD采樣位置自適應補償技術;然后將該技術用于CCD成像中,并進行了相關實驗。實驗表明,相關雙采樣信號的采樣位置與CCD信號在溫度大范圍變化的情況下,仍能精密對準,保證了圖像信噪比的穩定性,實現高質量成像。
2 CCD采樣位置自適應補償
成像電子學CCD采樣電路的設計中,CCD驅動信號的時序與采樣信號(SHP,SHD)的時序均由FPGA給出,其中SHP對復位區進行采樣,SHD對信號區進行采樣。由于復位區與信號區的信號平坦區域非常小(幾納秒),因此采樣位置的確定是相關雙采樣中最重要的工作,一旦采到其他位置會對圖像質量有著很大的影響。在整個CCD采樣鏈路中,驅動信號經過驅動器與CCD從而產生CCD視頻信號,視頻處理器通過采樣信號對CCD視頻信號進行采樣從而得到圖像數據。傳統的設計中,采樣時序信號由FPGA產生,直接通過視頻處理器進行采樣,如圖1所示。實驗表明,在兩個鏈路中受溫度影響而產生延時最大的是驅動器芯片,FPGA與CCD器件受環境溫度變化產生的延時非常小。由于只有驅動時序經過了CCD驅動芯片,這就帶來了采樣信號(SHP、SHD)與CCD信號在不同溫度下會有不同的延時、信號之間無法跟隨的問題。考慮到航天應用的可行性以及穩定性,在不引入過多電路的前提下,在采樣信號鏈路中增加相同的驅動器芯片,使在不同的環境溫度下,采樣信號與CCD信號產生相同的溫度偏移量,補償驅動器產生的溫度延時,達到相位動態跟隨的效果,從而獲取高質量的圖像。該自適應補償技術信號鏈路圖如圖2所示。

圖1 傳統的CCD采樣鏈路Fig.1 Traditional CCD sampling link

圖2 自適應補償CCD采樣鏈路Fig.2 Adaptive compensation CCD Sampling link
圖2中采樣信號與視頻信號經過相同型號的驅動芯片,在溫度發生大范圍變化的時候,可以建立起一定的跟隨關系。這里假設驅動時序鏈路上的驅動器A受到溫度影響而產生的延時為γ1,采樣時序鏈路上的驅動器B與CCD受到溫度影響而產生的延時為γ2與γ3,在溫度變化時,兩個鏈路的溫度延時之差是一個溫變值,將其定義為:
γDelay(T)= |γ1+γ2-γ3|,
(1)
其中T為溫度,在設計時將驅動芯片A和B選用同種類芯片,使得γ1與γ2基本一致,而CCD受到溫度變化產生的信號延遲γ3非常小,因此該設計使得兩個鏈路之間的延遲γDelay(T)達到最小化,在(-25~60 ℃)的溫度范圍內,該延時最大僅為0.46 ns,具體參見后續實驗。
3 采樣位置精密調節
CCD采樣鏈路中,驅動時序與采樣時序均由一個FPGA給出,由于兩個鏈路中的信號經過不同的走線與器件到達視頻處理器,這會導致采樣時兩個信號之間存在一個固定的初始相位差。為了獲取高質量的圖像,需要對采樣位置進行精密調節,使其對準于CCD信號的最佳位置。利用DCM的PhaseShift功能可以實現輸入時鐘的相位移動,以達到對采樣位置的精密調節。DCM的PhaseShift功能包括固定相位移動和可變相位移動,當采用可變相位移動時,可以動態實現輸入信號的相位延時,延時時間定義為:
PhaseShift(ns)=
(2)
其中:PhaseShift Value的范圍為-255~255,CLKINperiod為CCD像元時鐘周期。
使用相位延時后時鐘對采樣信號進行同步,即可實現采樣位置的高精度延時,如圖3所示。本文成像系統采用100 M時鐘,因此調節精度可達到0.039 ns(10 ns/256)。在CCD的復位區和信號區之內調節采樣位置SHP與SHD,調節范圍各為±1 ns(信號平坦區),在該范圍內調節到最佳位置。
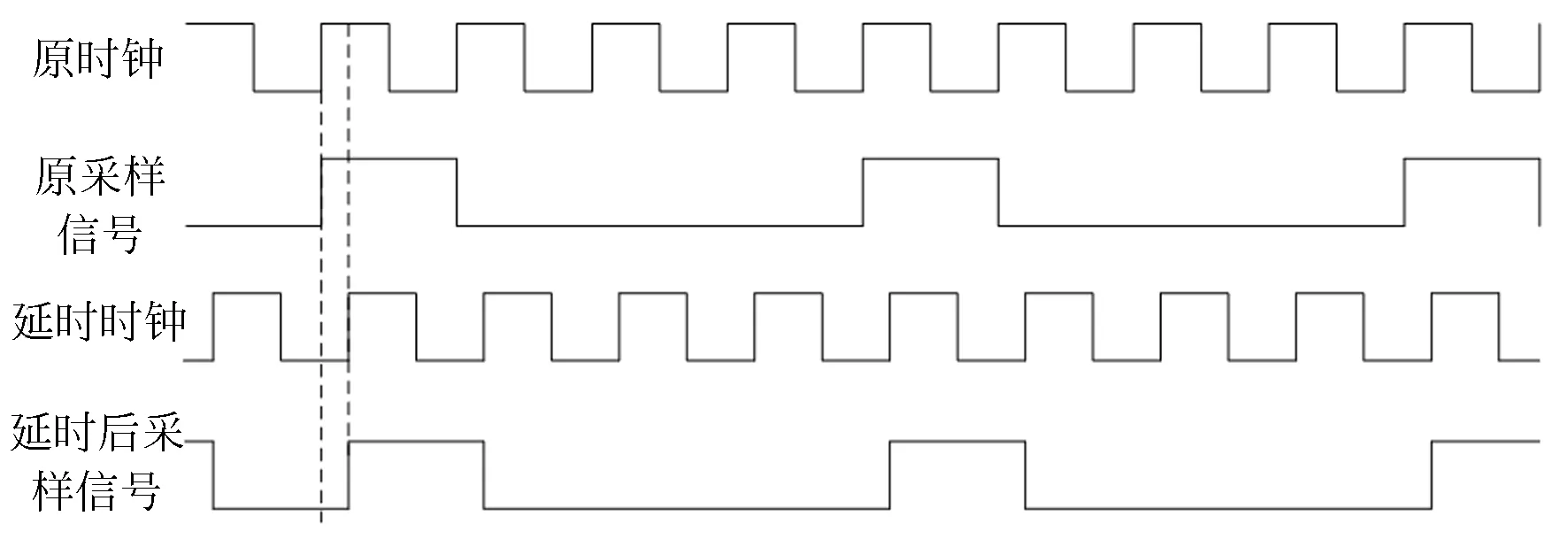
圖3 采樣信號同步時序圖Fig.3 Sampling signal synchronization timing
未進行精密調節時雙采樣初始相位誤差約為2.3 ns,采用本文方法精密調節后誤差可小于0.039 ns。
4 溫度動態適應性實驗與分析
為驗證該方法的可行性,將帶有自適應補償技術設計與傳統方法的兩個測試系統進行對比成像。將兩個測試系統放于高低溫箱中,在常溫下(25 ℃)分別對兩個成像系統的初始采樣位置(SHP,SHD)進行精密調節,保證兩個系統在常溫下初始采樣位置都處在最佳點,成像質量良好。在-25~60 ℃(空間相機地面環境試驗測試溫度)的溫度范圍下對兩個系統分別進行成像試驗,并實時監測CCD采樣位置。其中每副圖像中左右兩部分各為全色圖像和多光譜圖像。
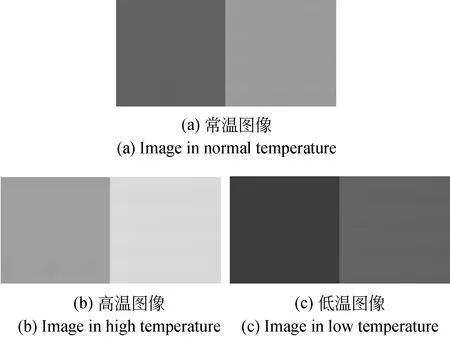
圖4 傳統方法圖像Fig.4 Image with and traditional method
從圖5高低溫圖像與常溫圖像的對比可以看出,帶有本文方法的測試系統在高低溫下成像效果均良好,全色圖像與多光譜圖像均與常溫對比沒有明顯變化。而傳統方法的測試系統在高溫和低溫的情況下,圖像的均勻性以及成像質量受到了溫度的影響,在高溫條件下,全色圖像與多光譜圖像均出現不同程度的飽和現象,低溫條件下,圖像較常溫圖像變暗,如圖4所示。
圖6是示波器采集的不同溫度下傳統方法中CCD信號與采樣信號的相對位置圖,高溫時CCD信號由于驅動芯片的原因,相位滯后于采樣信號,導致采樣信號SHP采到了CCD的復位電平上,圖像數據出現錯誤。低溫時CCD信號由于受到驅動芯片的影響,相位提前于采樣信號,使采樣信號SHD落在了下一個信號的上升沿,得到的圖像偏暗。

圖5 本文方法圖像Fig.5 Image with proposed method



圖6 傳統方法采樣位置Fig.6 Sampling position with traditional method
在-25~60 ℃的溫度范圍下,對各溫度點下的相關雙采樣信號采樣位置與常溫下(25 ℃)的最佳位置之間的延時進行了測試,同時與傳統方法的采樣位置延時進行了對比,結果如圖7所示。可以很明顯的看出,在溫度大范圍變化時,本文方法的采樣位置延時量遠小于傳統方法。其中采樣位置受溫度而產生的延時最大值為0.46 ns,采樣信號依然落在CCD信號可采樣范圍之內,不會對成像質量造成影響。

圖7 本文方法采樣位置偏移量與傳統方法采樣位置偏移量Fig.7 Sampling position offset with proposed method and traditional method
5 結 論
本文根據遙感相機在空間工作時大范圍溫度變化的現狀,提出了遙感相機CCD采樣位置自適應補償技術。文中首先對成像鏈路中的溫度延時進行了分析,針對延時電路給出了航天應用中可以實現的溫度補償方法,并對采樣位置進行初始精密調節。對本文的方法與傳統方法進行了高低溫試驗對比及分析,試驗結果表明:相關雙采樣信號的初始位置調節精度小于0.039 ns;在-25~60 ℃的溫度范圍下,相關雙采樣信號延時最大值為0.46 ns,保證了準確的采樣位置,成像質量均為良好。該方法已在某空間遙感相機上得到了在軌應用,下傳圖像的質量良好。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中國生殖健康(2019年3期)2019-02-01 06:12:26
Coco薇(2016年2期)2016-03-22 02:42:52
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56