
食品包裝袋膜模糊PID自適應糾偏控制
2020-05-06 02:47:40胡應坤
食品工業 2020年4期
胡應坤
廣東工貿職業技術學院(廣州 510510)
隨著食品包裝行業的快速發展以及消費者消費理念的不斷提高,生產企業和消費者對于食品外觀包裝品質要求越來越高。食品包裝主要是通過包裝機完成食品的包裝,為了保證包裝效率,包裝機通常以較高的速度運行,由于包裝機運行速度較快以及食品袋膜材料自身材質的影響,食品袋膜出現跑偏[1-3]。包裝食品袋膜跑偏通常會影響產品外觀品質,增加包裝誤差,嚴重甚至出現包裝機卡機現象,從而大大降低生產企業的生產效率。為了解決食品袋膜跑偏,需要采用檢測手段對袋膜偏移量進行采集,并將偏移量傳送到智能控制器中,控制器再根據跑偏量對糾偏機構進行適當控制,從而實現袋膜跑偏的自適應調整[4-5]。
為了克服袋膜跑偏對包裝產品品質的影響,以及袋膜原材料的不必要消耗,實現食品包裝流水線的自動運行,設計了一種基于線陣電耦合元件(Charge-coupled device,CCD)的模糊PID食品包裝袋膜自動糾偏控制系統,通過線陣CCD圖像傳感器對袋膜偏移量進行動態采集[6-8]。袋膜傳送系統具有非線性、時滯性等特點,且系統通常存在較大干擾,很難建立精確的袋膜糾偏系統數學模型,傳統PID控制方法控制效果較差。為此在傳統PID基礎上引入了模糊控制規則,模糊控制規則不依賴系統精確數學模型,適用于非線性、時變性等系統。
1 食品袋膜跑偏原因分析
食品袋膜跑偏是指袋膜經過傳送輥在傳送過程中由于外部受力不均勻,導致袋膜不能沿著基準線向前傳輸,從而偏離基準線。所研究的食品包裝機械主要由送料機構、拉膜機構、橫封和縱封機構、熱切機構等組成,其中拉膜機構中又包含放膜輥、打碼機以及CCD傳感器等。拉膜機構如圖1所示。
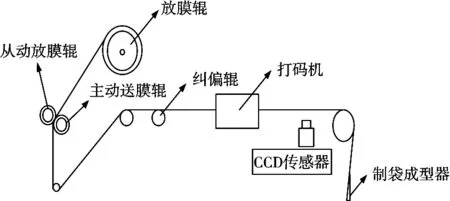
圖1 拉膜機構
袋膜在傳輸過程中由于需要經過各個導向輥,其跑偏的概率非常大,袋膜跑偏的主要原因可以總結為以下三點:
1) 送磨輥制造誤差導致輥子外表面呈現錐形,受到牽引力作用,導致袋膜兩側受到的摩擦阻力不同,產生橫向偏移力,從而使得袋膜向受摩擦阻力較大的一方偏移。
2) 由輥體安裝水平度出現誤差,袋膜在牽引力和最小靜摩擦力的作用下,產生橫向偏移力,使得袋膜向輸送正方向偏移。
3) 袋膜機械在強烈的振動過程中,包裝袋膜材料出現不同力的作用,從而使得袋膜偏移。
送膜輥或糾偏輥的水平度對于袋膜傳送過程中的平整度具有重要影響,因此可以通過對糾偏輥斜度進行調整從而完成糾偏,通過控制器控制糾偏結構向袋膜跑偏的反方向運動。
2 袋膜糾偏系統數學模型
利用CCD傳感器對袋膜材料邊緣跑偏量進行檢測,跑偏量為一階慣性函數,食品袋膜糾偏系統數學模型如圖2所示。
圖2中,x1為放卷輥處袋膜偏移的固有信號,經過CCD傳感器檢測后得到袋膜總偏移量e(t),T(s)為控制器傳遞函數,y為電機控制糾偏機構的運動量,且有:

式中:v為食品袋膜傳送速度;L為袋膜與CCD傳感器檢測點之間的距離。

式中:X為食品袋膜跑偏幅度;f為跑偏頻率。袋膜傳送速度越快,跑偏頻率f越大,f和v的關系為:

式中:k為修正系數。

圖2 袋膜糾偏數學模型
3 模糊PID控制器構建
食品袋膜傳送是一個非線性、時變性的復雜系統,其數學模型建立較為困難,傳統PID控制效果并不理想,而模糊控制由于具有不依賴數學模型的優點,故在PID控制器中引入模糊控制規則,通過模糊控制器對PID參數進行自適應在線調整,從而實現食品袋膜的自適應糾偏[9-10]。基于模糊PID控制器的食品袋膜自適應糾偏控制系統結構框圖如圖3所示。
假設糾偏系統輸出值為yout,目標值為yin,輸出值與目標值之差為誤差e,誤差變化率為ec,比例、積分、微分系數增量分別為ΔKP、ΔKI和ΔKD,根據系統輸出的結構自適應在線調整PID控制器參數,從而克服傳統PID控制器參數固定不變的缺陷。
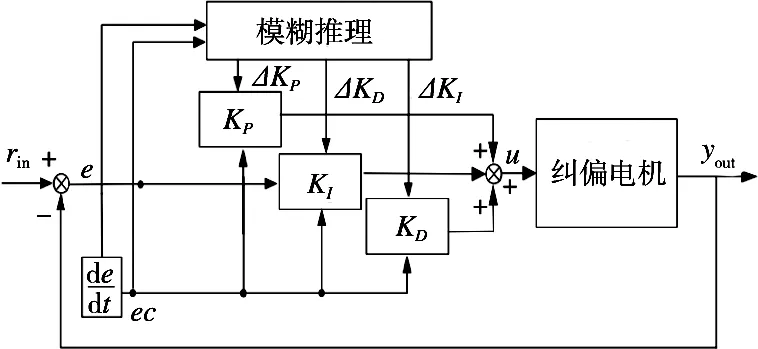
圖3 模糊PID控制器結構
模糊控制器的誤差e和誤差變化率ec的論域分別為[-3, 3]和[-8, 8];比例、積分、微分系數增量分別為ΔKP、ΔKI和ΔKD,實際論域為[-0.002, 0.002],[-0.02, 0.02]和[-0.005, 0.005]。假設模糊控制器的輸入輸出論域為E和EC,ΔKP、ΔKI、ΔKD={NB,NS,PS,Z,PM,NM,PB}。當|e|較大時,應給KP較大的增量以使控制系統能夠快速響應,同時根據ec具體情況適當對KI、KD進行調整。當|e|和ec較小時,說明PID控制器中的比例、積分、微分三個參數適中,并不需要進行調整。當|e|較小,ec正向較大時,對增量式傳統PID控制器中的KI進行適當增大;當ec負向較大時,需要對KI適當減小。
經過模糊控制理論,得到PID控制器的新參數:

式中:KP1、KI1、KD1為傳統PID的初始參數;ΔKP、ΔKI、ΔKD為經過模糊控制推理后得到的PID參數增量。
4 仿真與試驗
4.1 仿真
為了驗證提出的模糊PID食品包裝袋膜自適應糾偏控制系統的有效性,采用Matlab進行仿真分析,結果如圖4所示。由圖4可以看出,傳統PID控制趨于穩定時間明顯長于模糊PID控制;傳統PID控制超調量也明顯超過模糊PID控制下的超調量;由此可以看出模糊PID控制方法擁有更快的調節速度、更小超調量,具有更強的魯棒性。
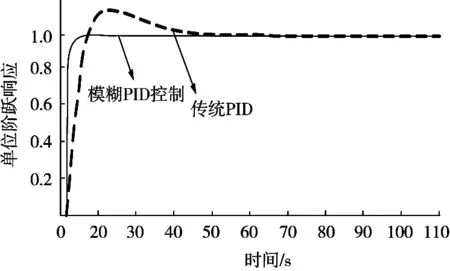
圖4 仿真結果
4.2 試驗
基于以上分析,采用模型號食品包裝機進行試驗,利用CCD傳感器對包裝材料的偏移量進行檢測,傳統PID控制下的袋膜偏移量見表1,模糊PID控制下的袋膜偏移量見表2。
由表1和表2可以看出,傳統PID控制和模糊PID控制下的食品袋膜糾偏誤差分別為2.31和0.69 mm。由此試驗數據可以說明,模糊PID控制方法對于糾偏精度更高,該控制方法能夠顯著提高食品包裝袋膜糾偏精度。
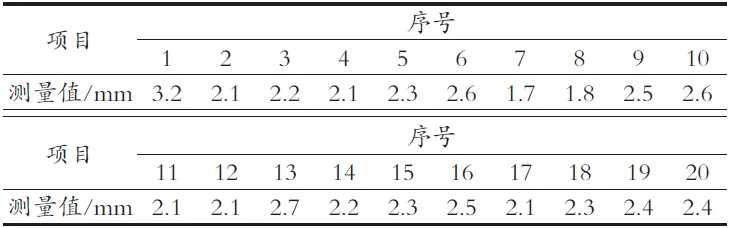
表1 傳統PID控制偏移量

表2 模糊PID偏移量
5 結語
分析了食品包裝機拉膜機構工作過程中袋膜跑偏原因,并分析了糾偏系統數學模型。針對食品包裝袋膜傳送過程中產生的時變參數,提出了一種基于模糊PID控制的糾偏控制系統。利用模糊控制理論不依賴精確數學模型的優點,通過模糊規則對傳統PID控制器參數進行在線自適應調整,從而獲得最優的PID控制參數。仿真和試驗結果表明,模糊PID控制方法明顯優于傳統PID控制,該控制方法具有更強的魯棒特性,平均糾偏誤差能夠控制在0.7 mm以內,該控制方法完全滿足食品包裝工藝要求。
