智能模擬電磁炮控制系統設計
2020-04-24 14:50:40黃佳琪王善偉毛凌青陳金江
電腦知識與技術 2020年5期
黃佳琪 王善偉 毛凌青 陳金江


摘要:該文闡述了由STM32F103C8T6為主控,以openmv4為圖像處理模塊的電磁炮控制系統的設計與實現。通過openmv4對引導標識的圖像識別捕獲處理得到目標點的水平偏角及距離。通過AD分壓采樣與mos管充電開關配合控制電容充電電壓,建立電容電壓與電磁炮發射距離之間的數學模型,通過調節電容電壓值使炮彈落點到指定位置。最終測試結果表明,該系統能自動獲取3m內的引導標識信息,并且實現精準射擊。
關鍵詞:自動捕獲;數學模型;控制電壓;電磁炮
中圖分類號:TP393 文獻標識碼:A
文章編號:1009-3044(2020)05-0225-02
開放科學(資源服務)標識碼(OSID):
隨著現代科技的發展與作戰戰術的發展,小型智能導彈需求增加,微系統、一體化技術的應用為低成本精確制導武器的發展提供了可能性[1]。為了讓電磁炮能更加廣泛地用于日常,具有更多現實意義,設計小型化、便攜式的智能化電磁炮是十分有必要的。本設計研究智能模擬電磁炮控制系統,可通過手動輸入目標距離與水平偏角或使其通過圖像處理自動捕獲目標并獲取水平偏角與距離,隨后一鍵式啟動發射,能夠精準擊中目標點。
1 系統總體方案設計
系統總體框圖如圖1所示,矩陣鍵盤與OLED屏作為人機交互部分,用于設置距離和偏角;openmv4為圖像處理模塊,用于識別目標靶并計算靶心與電磁炮間距離與水平偏角,從而控制舵機云臺兩個維度的轉動,調整發射水平角度與仰角使炮管對準目標;stm32f103c8t6為主控芯片,通過12位AD分壓采樣并計算大電容兩端電壓,建立電壓值與電磁炮射程的數學關系,判斷電容電壓值是否達到目標距離對應的電壓值,若達到預定值則斷開充電開關,開啟放電開關,電磁炮發射,使彈丸打到指定位置。
2 系統硬件設計
硬件電路主要包括以下四部分:控制及其外圍電路、電容充電與ADC采樣電路、電容充電開關電路、電容放電開關電路。
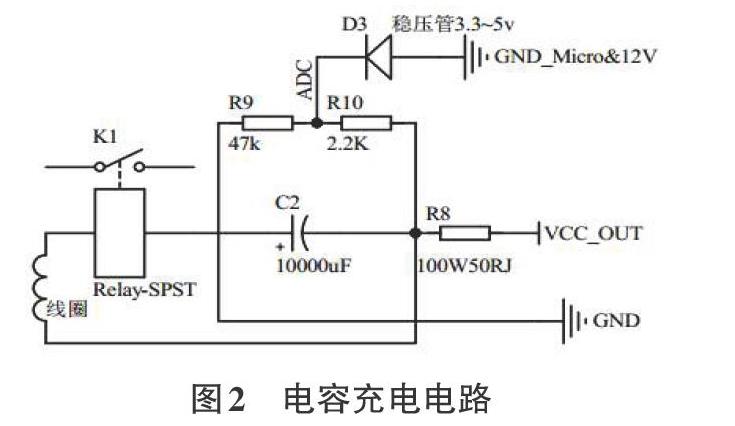
2.1 電容充電電路
電容充電電路如圖2所示,大電容采用lOOOOuF/IOOV電容,該電容耐壓為IOOV,在其兩端做ADC采樣分壓電路,用3.3V-5V的穩壓管保護微控制器,利用50歐的功率電阻使其充電速度變緩易于控制。
2.2 電容充電開關電路
電容充電開關電路如圖3所示,采用光耦將微控制器與給電容充電開關隔離避免操作失誤使微控制器燒毀;用MOS管作為開關電路,MOS管為電壓驅動型,有電壓就能夠導通,多用于大功率,大電流電壓的情況下;并用LED指示器是否正常工作。
2.3 電容放電開關電路
電容放電開關電路如圖4所示,由于電磁炮在放電的瞬間會產生極大的電流,采用25A大功率繼電器去控制放電,而用微控制器的10口驅動三極管讓12V的繼電器導通使電容放電,LED燈指示其是否正常工作。
2.4 控制及其外圍電路
本系統有兩個控制器,以STM32F103C8T6為主控,openmv用于圖像處理與舵機控制,它們之間用串口通信,控制鍵盤、OLED屏、兩個開關電路,STM32單片機10口分配如表1所示。
3 系統軟件設計
本系統是雙控制器的,stm32主要是用于控制電容的充放電與人機交互部分,openmv主要是用于圖像處理與舵機的控制。openmv通過串口與stm32相連,當系統需要使用openmv時,stm32會通過串口發送信息給openmv,openmv進行一系列控制之后再將“完成”的應答信息返回給stm32,stm32再進行相關控制。
3.1 STM32程序設計
系統上電后初始化硬件設備,通過串口解析openmv圖像處理信息,通過按鍵獲取當前工作模式,進入相應工作狀態,通過比較AD采樣值與當前目標距離對應電壓值判斷是否開炮,流程圖如圖5所示。
為了防止由于執行某項工作花費時間過長而導致系統穩定性較差,stm32f103c8t6通過SYstick定時器為串口檢測及解析、按鍵檢測、OLED屏顯示、開炮工作四個任務中依次切換提供調度硬件,各任務可被分配數ms時間進行工作,需要一個Systick來產生周期性的中斷,作為整個系統的時基,而且不能讓用戶程序隨意訪問它的寄存器,以維持操作系統“心跳”的節奏[2]。
3.2 0penmv程序設計
通過openmv自帶的感光芯片采集圖像數據,在原圖像中尋找與在預值范圍內的像素點,預值為LAB顏色空間L、A、B三通道值的范圍,在openmv編程時預先設定好,該范圍正好是靶標在光線影響下的顏色變化范圍。對這些像素點進行高斯平滑濾波,防止噪聲的干擾[3],找出圖像中這些像素點所組成的最大色塊,并計算出色塊中心在圖像中的坐標位置,并調用pid算法控制舵機轉動,使其坐標與目標坐標一致,從而使得炮口等對準環形靶,完成所有控制。通過獲得引導標識的像素點從而獲取目標距離,為減少像素點的丟失導致誤差的加大,選擇只測量在橫縱坐標差別最大的像素點減少誤差。最后向stm32返回目標距離與水平偏角。程序流程圖如圖6所示。
4 結束語
本文設計的電磁炮能夠在手動輸入距離與偏移角度時實現精準射擊功能,還具有在一定范圍內移動目標耙后,自動追蹤靶標并擊中靶標功能,且系統具有重量輕,規模小,發射時無后坐力等優點,此外,電磁炮在運行時電流大,電壓大,本系統特別設計了保護電路,以確保使用安全。且系統成本低,易于實現。模塊化的設計,提高了實際應用中選擇的靈活性。因此,具有廣泛市場前景。
參考文獻:
[1]李陽,秦濤,朱捷,等.電磁軌道炮發展趨勢及其關鍵控制技術[Jl.現代防御技術,2019,47(04):19-23.
[2]李立春,劉卓.基于ARM Cortex-M3的SysTick解析[J].吉林化工學院學報,2015,32(01):36-39.
[3]顧子侶,陳智強,趙磊,等.電磁炮作為無人機武器系統的設計原理[J].電子制作,2018(18):7-8.
【通聯編輯:唐一東】
