光伏用電致發(fā)光缺陷檢測儀空間分辨率的量化評估
2020-04-11 02:08:36楊愛軍黎健生羅海燕陳彩云
光學精密工程 2020年3期
何 翔,楊愛軍,黎健生,羅海燕,陳彩云
(福建省計量科學研究院,福建 福州 350003)
1 引 言
光伏用電致發(fā)光缺陷檢測儀是光伏組件生產過程中重要的檢測設備。其原理是通過對組件兩級增加正向偏壓,使用紅外數碼相機捕捉光伏組件發(fā)出的紅外光,再通過計算機處理后成像[1-2]。光伏用電致發(fā)光缺陷檢測儀能夠很好地檢測到光伏組件生產過程中產生的各種缺陷,如隱裂、斷柵等。
不同廠家生產的光伏用電致發(fā)光缺陷檢測儀性能有所差異,因此需要合理的設備評估方法。林劍春等[3]及ISO12233[4]提出以空間分辨率作為指標評估光伏用電致發(fā)光缺陷檢測儀性能,同時由福建省計量科學研究院/國家光伏產業(yè)計量測試中心主導的福建地方標準《JJF(閩)1088-2018光伏組件電致發(fā)光缺陷檢測儀校準規(guī)范》[5]以及正處于發(fā)布階段的相關國家標準也使用空間分辨率作為設備評估指標。
光伏用電致發(fā)光缺陷檢測儀空間分辨率評估方法采用的空間分辨率測試板由不透光的金屬制成,空間分辨率測試區(qū)域包括一系列連續(xù)排列的具有相等寬度的鏤空線對。測試時將空間分辨率測試板貼于光伏組件表面,以光伏組件發(fā)出的光作為背景光源,光通過空間分辨率測試板鏤空處形成線對圖像。使用光伏用電致發(fā)光缺陷檢測儀拍攝后,通過目視逐一判別線對圖像,找出能夠目視分辨的最密線對,其對應的空間分辨率即為該光伏用電致發(fā)光缺陷檢測儀的空間分辨率,從而對設備性能做出評估。
然而,上述目視判別過程嚴重受到判別者主觀因素的影響:不同判別者對于同一線對圖像可能給出不同結論,同一判別者對同一線對多次判別,也可能給出不同的結論。因此,需對目視判別線對過程進行量化,以提升判別準確度與重復性。文獻[6]提出將線對圖像沿著線對方向對圖像灰度求和,根據曲線最小的峰值-谷值差作為閾值依據,替代人為目視判斷。然而,人眼采集圖像信息并經過大腦分辨這一過程十分復雜,通過單一或幾個指標難以替代這一過程。
神經網絡是一種自適應非線性動態(tài)網絡[7],屬于端對端監(jiān)督學習。通過大量數據對模型進行訓練,訓練完成的模型能夠直接由數據映射最終結論,所有的數據特征由模型提取,能夠很好地模擬人眼采集圖像信息并由大腦分辨這一復雜過程。但是傳統(tǒng)的全連接神經網絡在訓練像素較多的圖像數據時,其網絡特性會產生大量的參數,導致訓練速度緩慢甚至無法訓練。由Sermanet P, Chintala S, LeCun Y提出的卷積神經網絡[8]主要包含輸入層、卷積層、池化層、全連接層和輸出層,它通過局部感知、參數共享大大降低了參數數量,解決了上述問題。卷積神經網絡常用于圖像識別[9],并且在許多領域已得到廣泛的應用[10-13]。
本文針對光伏用電致發(fā)光缺陷檢測儀空間分辨率目視判定重復性、準確性差,并且難以量化等問題,參考相關標準,提出一套基于卷積神經網絡的光伏用電致發(fā)光缺陷檢測儀空間分辨率圖像判別方法。該方法使用經過標識的線對圖像對卷積神經網絡模型進行訓練,完成訓練后使用該模型自動判斷線對圖像,替代目視判別,有效提高了檢測準確性。
2 數據準備
2.1 圖像拍攝
為了模擬不同的使用場景及環(huán)境,本文選取不同的拍攝條件以獲得各種情況下不同灰度及方向的線對圖像,具體拍攝條件如表1所示。
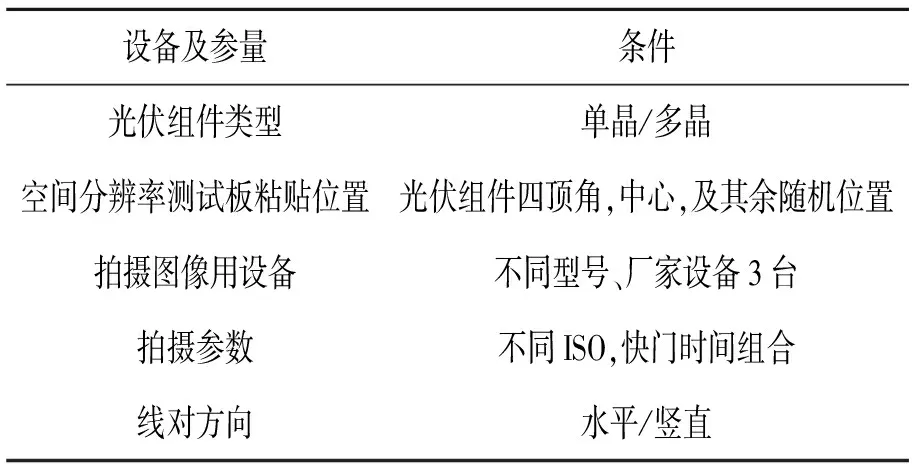
表1 拍攝條件
2.2 圖像預處理
由于拍攝后的圖像為光伏組件的電致發(fā)光成像圖,如圖1所示,需要經過預處理將每個線對圖像分離。本文采用的預處理方法為:(1)根據組件尺寸將電致發(fā)光成像圖中各電池片區(qū)域圖像切割分離;(2)由于粘貼空間分辨率測試板區(qū)域大量光線被遮擋,灰度值較低,因此根據分離后的電池片區(qū)域圖像的平均灰度篩選出粘貼空間分辨率測試板的圖像區(qū)域,如圖2所示;(3)對空間分辨率測試板的區(qū)域進行二值化處理,并對二值化圖像沿著列方向求和,獲得灰度求和曲線。根據不同區(qū)域灰度求和曲線不連續(xù)性的特點切割出空間分辨率線對所在區(qū)域,典型區(qū)域如圖3所示;(4)將空間分辨率線對所在區(qū)域圖像進行二值化、灰度閉運算消除單個線對內部空隙,對處理后的圖像沿著圖3短邊方向灰度求和,獲得灰度求和曲線,根據不同線對灰度求和曲線不連續(xù)性的特點逐一切割出空間分辨率線對圖像;(5)由于卷積神經網絡需確定輸入模型的圖像尺寸,因此根據分離后的最大線對圖像尺寸,將所有線對圖像擴展為128×128像素的圖像,擴展區(qū)域灰度為0,最終處理完成的典型線對圖像如圖4所示。
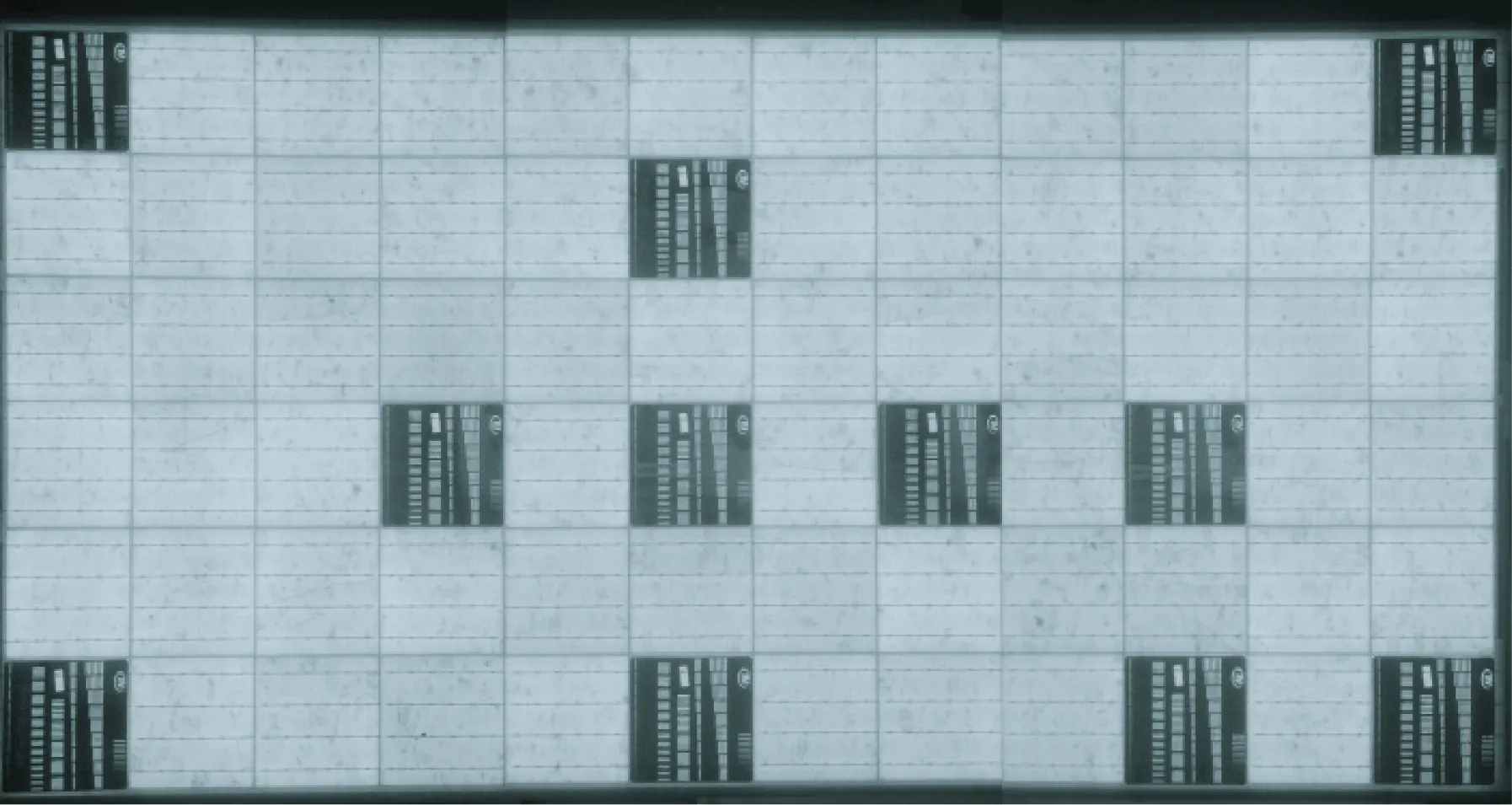
圖1 光伏用電致發(fā)光成像圖Fig.1 Image of photovoltaic electroluminescence
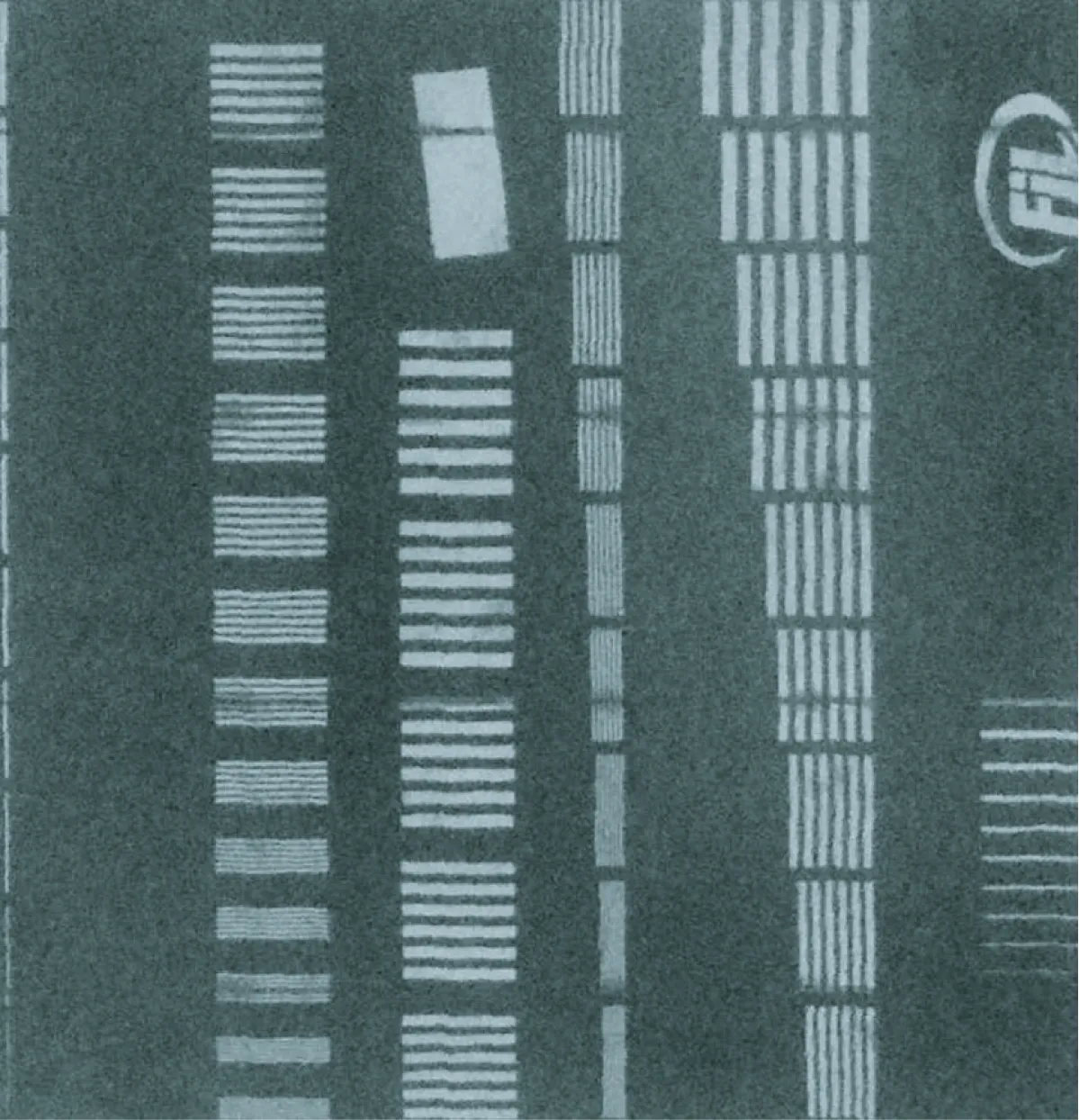
圖2 空間分辨率測試板成像區(qū)域Fig.2 Imaging area of resolution test chart
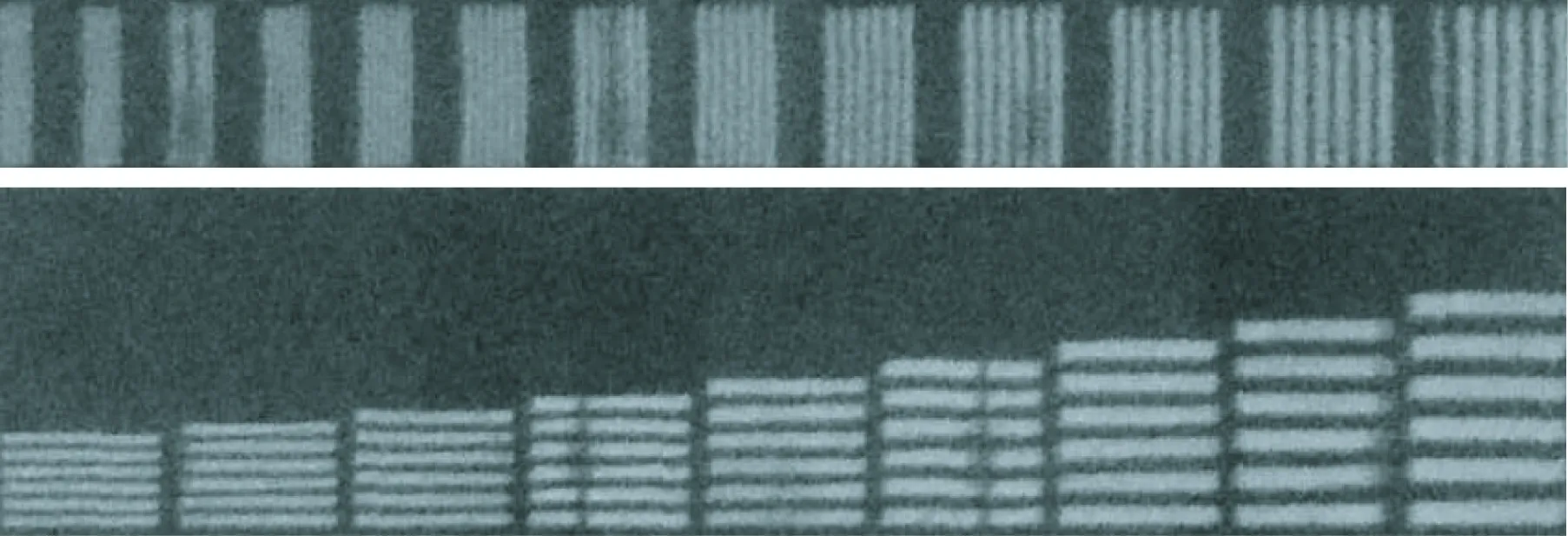
圖3 空間分辨率線對所在區(qū)域Fig.3 Image of resolution line pairs
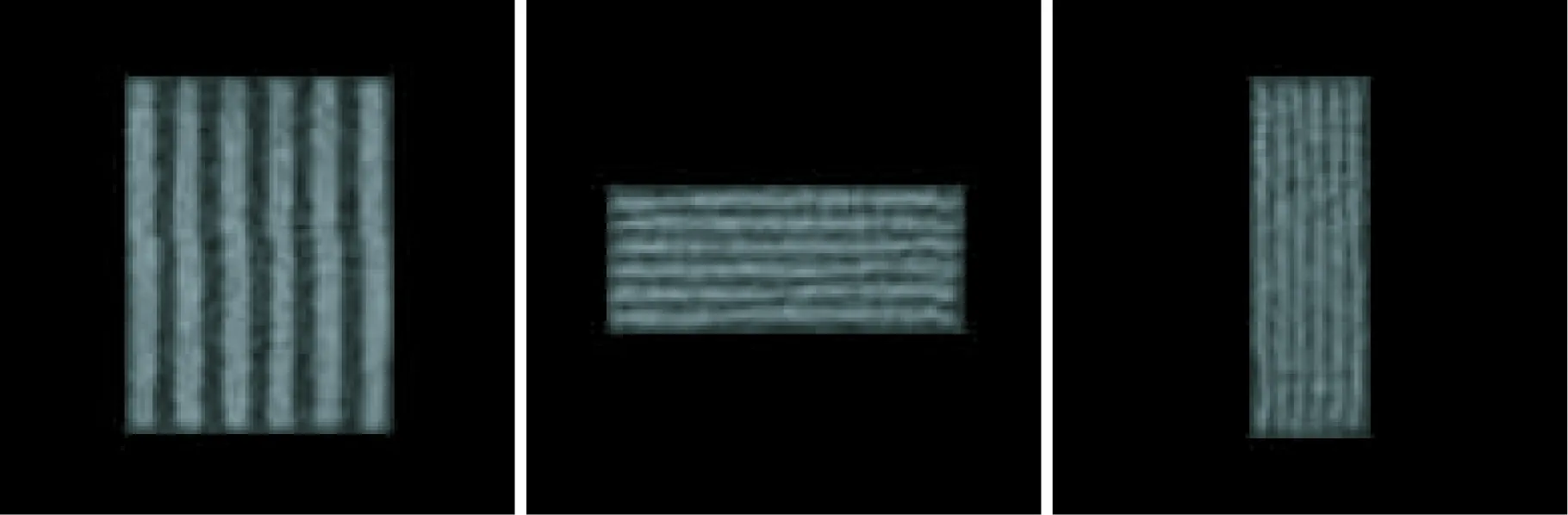
圖4 預處理完成后的線對圖像Fig.4 Image of line pairs after pretreatment
2.3 訓練樣本分類
選取三名有光伏用電致發(fā)光缺陷檢測儀檢測經驗的人員分別對所有線對圖像進行目視判定,判定結果分為“清晰”與“不清晰”兩種類型。由于需分類的圖像數目較多,在判定大量圖像時,判定人員在開始部分對圖像的判定標準可能與后續(xù)存在較大差異,因此對于每個人前100張線對圖像的判定不予采用。線對圖像是否“清晰”取決于3名人員的共同判定結果,若判定存在分歧,則以支持人數較多的判定為最終結果。最后,為了避免不同類別訓練樣本數量差異影響模型訓練結果,隨機去除部分圖像以平衡“清晰”與“不清晰”的線對圖像數量。
2.4 訓練樣本增強
為了模擬實際測試過程中空間分辨率測試板粘貼、傾斜的現(xiàn)象,增加訓練樣本數。將2.3小節(jié)中得到的圖像隨機旋轉-10°~10°并增加到訓練樣本中,保持原樣本分類不變。最終得到“清晰”線對圖像3 272張,“不清晰”線對圖像3 272 張。從以上兩組樣本中各隨機選取250張線對圖像,共500張組成測試集,剩余6 044張線對圖像作為訓練集。
3 神經網絡模型
本文所采用的神經網絡結構如下:每張圖像轉換為1行,128×128列的矩陣,矩陣中數值表示對應像素點的灰度值。圖像分類標簽采用one-hot編碼格式,判定為“清晰”的圖像標簽為[1,0]矩陣,判定為“不清晰”的圖像標簽為[0,1]矩陣。考慮到樣本數量較大,每次選取小批量樣本輸入模型進行訓練,每批量的樣本數為256。
模型共3層卷積層,每層卷積核尺寸為3×3,圖像長寬方向步長都為1,激活函數采用relu函數,數學表示式如式(1)所示,函數圖像如圖5所示。相比sigmoid和tanh激活函數, relu激活函數計算簡單,能夠提高訓練速度[9]。池化層分別采用長寬方向步長都為2的最大池化層。總體結構示意圖如圖6所示。
f(x)=max(0,x).
(1)
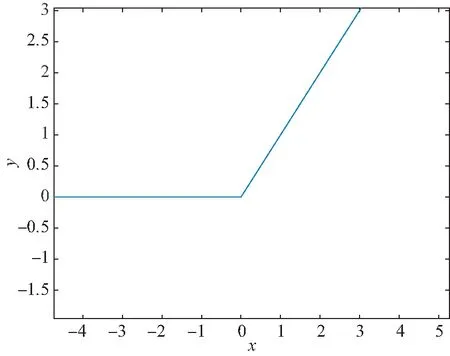
圖5 relu函數圖像Fig.5 Image of relu function

圖6 卷積層、池化層的結構示意圖Fig.6 Schematic diagram of convolutional layer and pool layer
之后連接一個全連接神經網絡,輸入層神經元數量為16×16×128個,隱藏層神經元數量為256個,輸出層神經元數量為2個,結構如圖7所示。對全連接層設置權重丟棄[14]以避免過擬合,即每次計算時選取一部分權重臨時不參與計算,丟棄率為0.5。
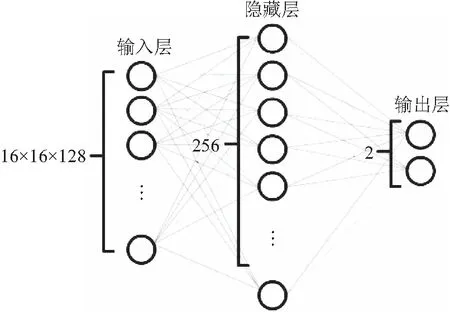
圖7 全連接層結構示意圖Fig.7 Schematic diagram of full connected layer
損失函數采用softmax交叉熵損失函數,數學表達式為:
(2)
式中:loss為損失函數,pi為模型預測結果矩陣中第i個元素值,yi為訓練集標簽矩陣中第i個元素值,trian_num為訓練集樣本數。優(yōu)化器選擇Adam優(yōu)化器,學習率為1×104。
為了充分利用訓練樣本,本文采用K折交叉驗證對模型進行驗證,K取10。將訓練集隨機平均分為10份,每次不重復的選取1份作為驗證集,其余9份數據作為訓練集,計算驗證集的損失函數與準確率。最后,統(tǒng)計10次驗證集的平均損失函數與準確率作為本輪訓練的損失函數與準確率。K折交叉驗證示意圖如圖8所示。
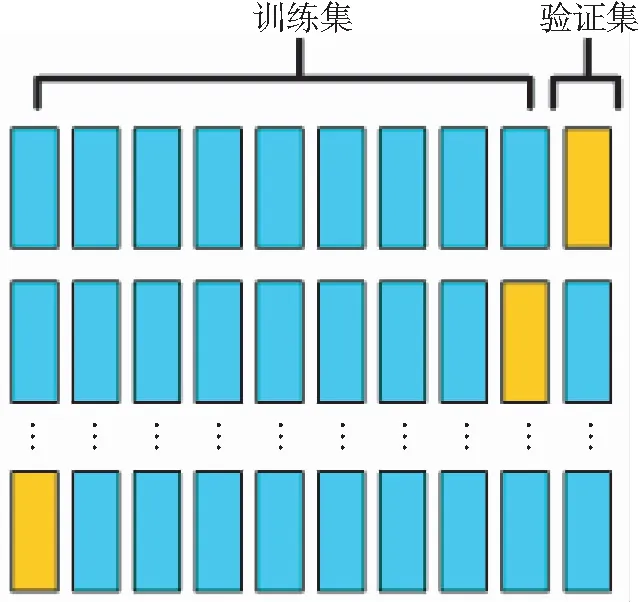
圖8 K折交叉驗證示意圖Fig.8 Schematic diagram of K-fold cross-validation
4 模型訓練及驗證
4.1 模型訓練
使用以上參數對模型進行訓練,本文采用tensorflow深度學習框架,python語言。圖9為訓練集的損失函數與準確度隨著訓練次數的變化曲線。可以看出,訓練開始后驗證集損失函數迅速下降,驗證集準確率迅速上升,在約100次訓練后,速度減緩;在約600次訓練后,驗證集的損失函數與準確率基本保持穩(wěn)定,分別約為0.318與99.5%。
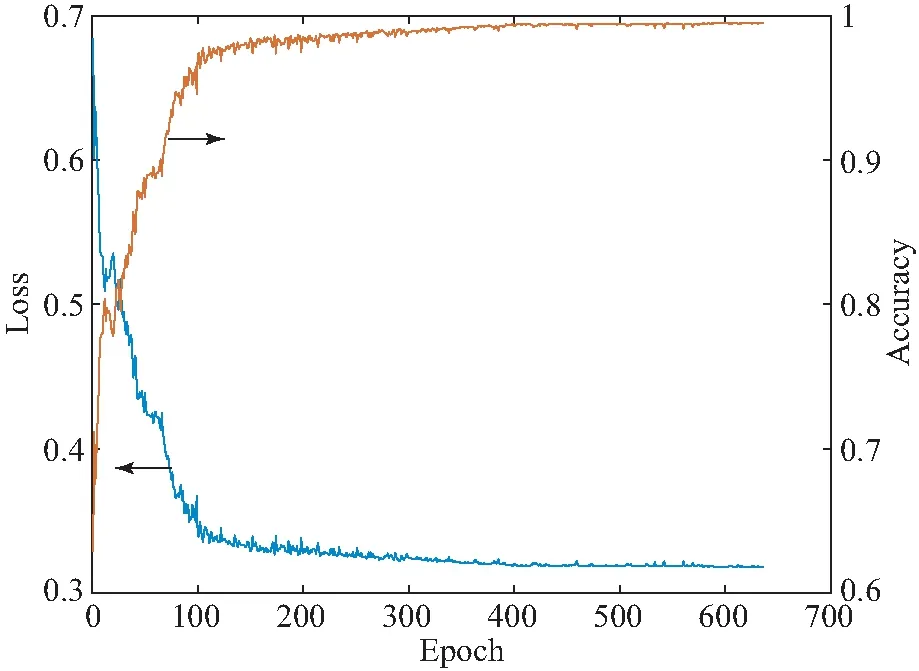
圖9 損失函數與訓練集準確度曲線Fig.9 Loss function and accuracy curve of training set
4.2 模型驗證
訓練完成后,使用模型對測試集進行預測,并統(tǒng)計預測準確度,最終在500張測試圖像中,判定正確的數量為496張,判定錯誤的數量為4張,測試準確度為99.2%,與驗證集準確率相近,未發(fā)生過擬合。
5 結 論
本文提出一套基于卷積神經網絡的光伏用電致發(fā)光缺陷檢測儀空間分辨率圖像判別方法,采取不同的拍攝條件拍攝并切割出空間分辨率線對圖像,對圖像進行人工分類。設計卷積神經網絡結構,采用卷積層、池化層和全連接層結構,并使用已分類完成的空間分辨率線對圖像對模型進行訓練。最終使用測試樣本對模型進行評估,結果表明,模型在測試樣本上的判別正確率達到99.2%,并且未發(fā)生過擬合。該方法提高了光伏用電致發(fā)光缺陷檢測儀空間分辨率判定的準確性與重復性,并為其量化提出了新的解決思路。同時,由于太陽電池片用光致發(fā)光缺陷檢測儀與光伏用電致發(fā)光缺陷檢測儀有著類似的成像方式,因此可將文獻[3,5]所用的方法擴展到光致發(fā)光缺陷檢測設備的性能評估中,同時本文提出的方法可兼容光致發(fā)光缺陷檢測設備的空間分辨率性能評估。