小型/低功耗的靶場時間統(tǒng)一裝置設(shè)計*
2020-03-29 13:59:54錢禮華杜劍英申曉敏
彈箭與制導(dǎo)學(xué)報 2020年6期
錢禮華,杜劍英,申曉敏,康 強(qiáng),張 潔
(中國兵器工業(yè)試驗(yàn)測試研究院, 陜西華陰 714200)
0 引言
在靶場測量任務(wù)中,一般由彈道雷達(dá)、光電經(jīng)緯儀、遙測站和高速成像設(shè)備等共同完成數(shù)據(jù)的獲取和記錄。多類型的測量數(shù)據(jù)和事件都必須按照嚴(yán)格統(tǒng)一的時間標(biāo)準(zhǔn)對它們進(jìn)行分析和處理,這樣才具有綜合分析的價值[1-4]。
目前大型測量設(shè)備均具有時間統(tǒng)一設(shè)備,但小型的高速成像設(shè)備、遙測移動站和區(qū)截速度測量設(shè)備不具有時統(tǒng)功能[5]。文中針對以上設(shè)備的需求進(jìn)行小型、低功耗的時間統(tǒng)一裝置的設(shè)計論述。
1 主要技術(shù)指標(biāo)
時間統(tǒng)一裝置主要技術(shù)指標(biāo)包含授時模塊、觸發(fā)端口、輸出端口、內(nèi)部時基和電源等部分。技術(shù)指標(biāo)如下:
1)授時精度:20 ns
2)鎖時精度:優(yōu)于1 μs
3)觸發(fā)方式:通斷、斷通、TTL、28 V
4)輸出方式:通斷輸出、斷通輸出、TTL
5)供電方式:內(nèi)部鋰電池
6)工作溫度:-20~50 ℃
2 工作原理
時間統(tǒng)一裝置主要由信號調(diào)理模塊、單穩(wěn)態(tài)模塊、授時模塊、單片機(jī)、CPLD信號處理模塊和LCD2004A顯示模塊等組成。工作原理見圖1。
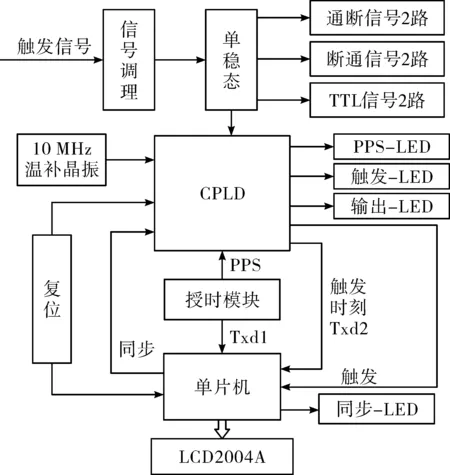
圖1 工作原理圖
授時模塊[6]為時間統(tǒng)一裝置提供UTC時間信息和PPS秒脈沖,利用內(nèi)部單片機(jī)電路和CPLD電路分別對時間信息解讀和秒信號進(jìn)行處理;當(dāng)外部觸發(fā)信號到來時,鎖定當(dāng)前時間信息和秒時刻并利用LCD進(jìn)行顯示。
工作流程如下:
1)單片機(jī)接收衛(wèi)星模塊串口TXD1發(fā)送的信息并解析,當(dāng)接收衛(wèi)星有效數(shù)量大于5時,單片機(jī)控制LCD2004A顯示當(dāng)前衛(wèi)星數(shù)量和時、分、秒時間信息,點(diǎn)亮TB-LED指示燈。
2)時間統(tǒng)一裝置接收到外部的觸發(fā)(啟動)信號后,經(jīng)信號調(diào)理和單穩(wěn)態(tài)電路處理,對外輸出2路通斷、2路斷通和2路TTL信號共6路。
3)當(dāng)觸發(fā)信號到來時,Stop跳變?yōu)榈碗娖剑搓P(guān)閉計數(shù)器脈沖,6位同步計數(shù)器鎖定當(dāng)前微秒時刻xμs,微秒數(shù)據(jù)通過串口模塊以9 600波特率傳給STC單片機(jī)的串口2。
4)單片機(jī)收到CPLD發(fā)送的trg觸發(fā)信號后,控制LCD2004A顯示當(dāng)前為鎖定狀態(tài)和鎖定的時、分、秒、微秒時間信息,單片機(jī)將時間信息處理后,在LCD2004A上顯示了觸發(fā)時刻的時、分、秒、微秒信息。
3 電路和時序設(shè)計
3.1 衛(wèi)星授時模塊
時間統(tǒng)一裝置內(nèi)部為一款高性能BDS/GNSS 全星座定位授時模塊[6],采用低功耗AT6558芯片,支持BDS、GPS、GLONASS和GALILEO等多種衛(wèi)星導(dǎo)航系統(tǒng)。
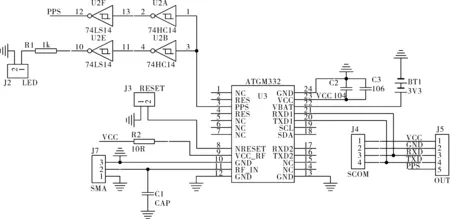
圖2 衛(wèi)星授時模塊的應(yīng)用電路
衛(wèi)星授時模塊的應(yīng)用電路如圖2所示。模塊輸出精確秒脈沖PPS,脈沖上升沿與UTC時間對齊。設(shè)計時采用單片機(jī)異步串行通信方式與衛(wèi)星授時模塊進(jìn)行信息交換。衛(wèi)星授時模塊輸出兼容國際標(biāo)準(zhǔn)NMEA0183 協(xié)議。
設(shè)計中只讀取輸出$GNGGA信息。該語句包含時間、緯度、經(jīng)度、衛(wèi)星數(shù)量、速度、高程等信息。
3.2 單片機(jī)數(shù)據(jù)解析
利用STC15L2K60S2單片機(jī)串口接收衛(wèi)星授時模塊發(fā)送的信息,提取出時間、狀態(tài)和衛(wèi)星數(shù)量等10位數(shù)據(jù)。LCD2004A的顯示效果見圖3。可以讀出當(dāng)前時間為11時、 56分、 53秒;衛(wèi)星模式為1(差分狀態(tài));接收到有效衛(wèi)星數(shù)量為8顆;時統(tǒng)裝置處于同步狀態(tài)。

圖3 LCD2004A顯示圖
單片機(jī)數(shù)據(jù)解析$GNGGA 信息的中斷子函數(shù)如下:
void RECEIVE_DATA(void) interrupt 4 using 3
{
unsigned char temp=0; ES=0;
temp=SBUF;
RI=0;
LED1=~LED1;
if(temp == '$')
{
RX_Count=0;
Flag_GPS_OK=0;
}
RX_Buffer[RX_Count++]=temp;
if(RX_Count >= 68)
{
RX_Count=68;
Flag_GPS_OK=1;
}
ES=1;
}
3.3 CPLD內(nèi)部邏輯控制單元
CPLD作為控制核心,負(fù)責(zé)PPS信號處理及鎖時時刻獲取。CPLD在接收到單片機(jī)發(fā)送來的同步信號后,打開與門使GPS-PPS信號通過,該信號進(jìn)一步處理,輸出穩(wěn)定的內(nèi)部PPS信號;因此當(dāng)時間統(tǒng)一裝置同步一次后,即使出現(xiàn)衛(wèi)星接收機(jī)短時失步,內(nèi)部PPS信號也可保證時間統(tǒng)一。由于設(shè)計采用的晶體振蕩器為0.1PPM,因此在失步大于10 s以內(nèi)時,同步誤差也能小于1 μs。圖4為PPS處理電路。
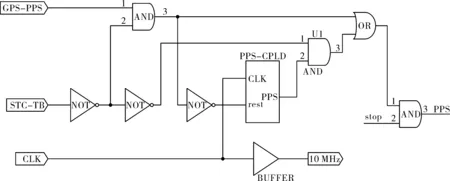
圖4 PPS處理電路
3.4 鎖時電路設(shè)計
當(dāng)鎖時信號(stop)到來時,CPLD內(nèi)部設(shè)計的6位同步計數(shù)器鎖定當(dāng)前時刻。圖5為鎖時處理電路。
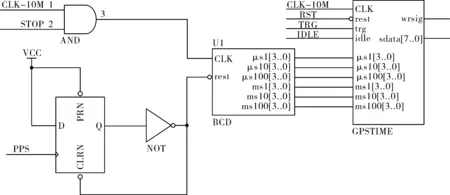
圖5 鎖時處理電路
3.5 低功耗設(shè)計
時間統(tǒng)一裝置主要工作在野外試驗(yàn)場地,一般由電池供電,因此在設(shè)計中進(jìn)行低功耗設(shè)計。
主要工作核心電路和顯示期間均選取3.3 V低電壓、低功耗器件:如MCU選用了STC公司低功耗處理器STC15L2K60S2單片機(jī);控制器選用EPM570;顯示器件選用LCD2004A;晶體振蕩器選用TCXO溫補(bǔ)型。在設(shè)計中對于未使用單片機(jī)I/O口均采用Input和pull-up模式,其單端口電流消耗僅為0.4 μA;因此電路總電流約120 mA。經(jīng)實(shí)測采用3.7 V/2 600 mAH的鋰電池供電,連續(xù)工作時間大于10 h。
4 檢測與驗(yàn)證
時間統(tǒng)一裝置在檢測性能時,先利用安捷倫53132A高精度計數(shù)器進(jìn)行時鐘的頻率準(zhǔn)確度、頻率穩(wěn)定度檢測;然后利用比對的方法對鎖時誤差進(jìn)行比對校準(zhǔn)。校準(zhǔn)示意如圖6。
同步觸發(fā)器發(fā)出兩路同步信號分別是T0輸入至?xí)r間統(tǒng)一裝置和高精度計數(shù)器;高精度計數(shù)器的兩路輸入信號,一路為PPS時間,另一路為T0。當(dāng)時間統(tǒng)一裝置發(fā)出觸發(fā)信號T0時,時間統(tǒng)一裝置鎖定觸發(fā)時刻時間,記為T1;同時高精度計數(shù)器也測量得到T0和PPS時間的差值,記為T2。通過比對T1記錄下的秒以下時間數(shù)據(jù)和T2的差值,就可得出鎖時誤差值。裝置經(jīng)計量檢驗(yàn),鎖時差值為0.5 μs。
5 結(jié)論
嚴(yán)格統(tǒng)一的時間基準(zhǔn)是多數(shù)據(jù)綜合測試任務(wù)中至關(guān)重要的參數(shù)之一。從靶場測試實(shí)際出發(fā),基于時間統(tǒng)一裝置的主要功能和技術(shù)指標(biāo)要求,對衛(wèi)星授時、CPLD內(nèi)部邏輯控制、STC單片機(jī)數(shù)據(jù)解析、鎖時及低功耗等模塊進(jìn)行優(yōu)化設(shè)計,研制了一種小型、低功耗的靶場時間統(tǒng)一裝置。該裝置經(jīng)檢驗(yàn),鎖時誤差僅為0.5 μs。在靶場外場使用內(nèi)部電池的情況下,可連續(xù)工作10 h以上,且能夠可靠觸發(fā)連接的高速錄像和區(qū)截速度測量設(shè)備。各項(xiàng)指標(biāo)均滿足設(shè)計要求,具有良好的應(yīng)用前景。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機(jī)械氣動工具(2016年3期)2016-03-01 04:00:25
