基于機(jī)載組合導(dǎo)航數(shù)據(jù)的雷達(dá)探測(cè)效能評(píng)估方法研究*
2020-03-30 06:40:02白瑞陽
彈箭與制導(dǎo)學(xué)報(bào) 2020年6期
徐 琳,白瑞陽
(1 中國(guó)航空研究院,北京 100029; 2 95910部隊(duì),甘肅酒泉 735018)
0 引言
自海灣戰(zhàn)爭(zhēng)以來,超視距(BVR)空戰(zhàn)已成為信息時(shí)代空戰(zhàn)對(duì)抗的主流形式。作為支撐超視距空戰(zhàn)的關(guān)鍵傳感器之一,機(jī)載雷達(dá)的探測(cè)精度直接決定著空空導(dǎo)彈的制導(dǎo)精度,進(jìn)而影響空戰(zhàn)結(jié)果,越來越受到人們的高度重視[1]。目前,對(duì)機(jī)載雷達(dá)探測(cè)精度的評(píng)估手段比較單一,主要利用機(jī)載雷達(dá)探測(cè)數(shù)據(jù)與高精度雷達(dá)探測(cè)數(shù)據(jù)進(jìn)行對(duì)比分析評(píng)估,評(píng)估周期較長(zhǎng)、精度有限,且組織實(shí)施不便[2]。考慮到組合導(dǎo)航系統(tǒng)精度不斷提升,其定位精度已大大優(yōu)于機(jī)載雷達(dá)探測(cè)精度,利用組合導(dǎo)航定位信息評(píng)估機(jī)載雷達(dá)探測(cè)精度,可準(zhǔn)確分析雷達(dá)探測(cè)誤差規(guī)律,真實(shí)反映雷達(dá)品質(zhì)[3]。文中綜合處理GNSS/INS組合導(dǎo)航定位數(shù)據(jù)與機(jī)載雷達(dá)探測(cè)數(shù)據(jù),探究速度、高度等因素對(duì)雷達(dá)探測(cè)誤差的影響規(guī)律,提出一種基于日常訓(xùn)練數(shù)據(jù)的機(jī)載雷達(dá)探測(cè)效能評(píng)估方法,可從多維度綜合分析誤差規(guī)律,為進(jìn)一步提高雷達(dá)精度提供支撐。
1 雷達(dá)探測(cè)效能數(shù)據(jù)處理方法
雷達(dá)載機(jī)以及慣性導(dǎo)航系統(tǒng)給出的位置信息為WGS-84坐標(biāo)系中的經(jīng)度、緯度、高度(L,B,H)。而雷達(dá)坐標(biāo)系下,目標(biāo)機(jī)的位置是雷達(dá)探測(cè)的距離、方位、俯仰(R,A,E)。因此需要進(jìn)行坐標(biāo)轉(zhuǎn)換,將目標(biāo)機(jī)的經(jīng)緯高轉(zhuǎn)換為載機(jī)雷達(dá)坐標(biāo)系的距離、方位、俯仰,以便評(píng)估雷達(dá)的探測(cè)效能。
1)將載機(jī)和目標(biāo)的經(jīng)緯高(L,B,H)轉(zhuǎn)換為地心直角坐標(biāo)(x,y,z)
WGS-84坐標(biāo)系是一種國(guó)際上通用的地心坐標(biāo)系。坐標(biāo)原點(diǎn)為地球質(zhì)心,其地心空間直角坐標(biāo)系的Z軸指向BIH (國(guó)際時(shí)間服務(wù)機(jī)構(gòu))1984.0定義的協(xié)議地球極(CTP)方向,Xw軸指向BIH 1984.0的零子午面和CTP赤道的交點(diǎn),Yw軸與Zw軸、Xw軸垂直構(gòu)成右手坐標(biāo)系。
地心直角坐標(biāo)系的定義為原點(diǎn)O與地球質(zhì)心重合,Z軸指向地球北極,X軸指向格林尼治子午面與地球赤道的交點(diǎn),Y軸垂直于XOZ平面構(gòu)成右手坐標(biāo)系。兩者之間可以通過式(1)進(jìn)行轉(zhuǎn)換:
(1)
2)將目標(biāo)的地心空間直角坐標(biāo)(x,y,z)轉(zhuǎn)化為載機(jī)地理坐標(biāo)(xg,yg,zg)
載機(jī)地理坐標(biāo)系以載機(jī)重心為坐標(biāo)原點(diǎn),xg軸位于水平面內(nèi),指向正北,yg軸指向正西,zg軸垂直于地平面向下。由式(1)得到的目標(biāo)和載機(jī)的地心空間直角坐標(biāo)分別為(xm,ym,zm)、(xz,yz,zz),則有:
(2)
(3)
3)載機(jī)地理坐標(biāo)系(xg,yg,zg)轉(zhuǎn)換成載機(jī)坐標(biāo)系(xb,yb,zb)
如圖1所示,載機(jī)坐標(biāo)系坐標(biāo)原點(diǎn)同載機(jī)地理坐標(biāo)系為載機(jī)重心,Xb軸為載機(jī)機(jī)身縱軸,向前為正,Yb軸為機(jī)翼展向,左翼展向?yàn)檎凑沼沂肿鴺?biāo)系,Zb軸在飛機(jī)對(duì)稱面內(nèi),垂直于飛機(jī)平面向上。
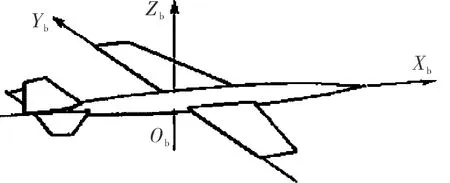
圖1 飛機(jī)機(jī)體坐標(biāo)系
載機(jī)的俯仰角θz為機(jī)體軸ObXb與地平面的夾角,飛機(jī)抬頭為正;航向角ψz為機(jī)體軸ObXb在水平面上的投影與地面軸OgXg之間的夾角,以機(jī)頭右偏為正;滾轉(zhuǎn)角rz為飛機(jī)對(duì)稱面繞機(jī)體軸ObXb轉(zhuǎn)過的角度,右滾為正。
由載機(jī)地理坐標(biāo)系轉(zhuǎn)換為載機(jī)坐標(biāo)系按照式(4)進(jìn)行:
(4)
其中:
Cb=Rx(rz)Ry(-θz)Rz(-ψz)
(5)
(6)
(7)
(8)
4)載機(jī)坐標(biāo)系與載機(jī)雷達(dá)坐標(biāo)系之間的轉(zhuǎn)換
載機(jī)雷達(dá)坐標(biāo)系由機(jī)體坐標(biāo)系ObXbYbZb繞ObYb軸轉(zhuǎn)過雷達(dá)安裝角而成。當(dāng)不考慮雷達(dá)安裝角時(shí),雷達(dá)坐標(biāo)系與機(jī)體坐標(biāo)系重合。文中暫不考慮雷達(dá)安裝角。
(9)
(10)
(11)
式中:R為載機(jī)與目標(biāo)的距離;A為目標(biāo)相對(duì)載機(jī)機(jī)身縱軸的方位角,即R在平面ObXbYb的射影與ObXb正向的夾角;E為目標(biāo)相對(duì)于平面ObXbYb的俯仰角。
2 雷達(dá)探測(cè)效能影響因素求解
2.1 目標(biāo)機(jī)及載機(jī)相對(duì)速度、加速度求解
雷達(dá)的探測(cè)效能除了與目標(biāo)機(jī)距離相關(guān),還與目標(biāo)機(jī)的機(jī)動(dòng)特性有很大關(guān)系。目標(biāo)機(jī)及載機(jī)速度及加速度分別為(vmx,vmy,vmz),(vzx,vzy,vzz);(amx,amy,amz),(azx,azy,azz)。其坐標(biāo)系均為該機(jī)地理坐標(biāo)系,因在雷達(dá)視距范圍內(nèi),兩機(jī)距離較近,忽略兩機(jī)地理坐標(biāo)系坐標(biāo)軸方向的誤差[5-6]。則兩機(jī)相對(duì)速度及加速度在地理坐標(biāo)系下為:
(12)
(13)
將相對(duì)速度及加速度轉(zhuǎn)化為載機(jī)雷達(dá)坐標(biāo)系則有:
(14)
(15)
由此可得載機(jī)雷達(dá)軸向相對(duì)速度及加速度分別為:
va=vbx
(16)
aa=abx
(17)
載機(jī)雷達(dá)徑向相對(duì)速度及加速度分別為:
(18)
(19)
2.2 目標(biāo)機(jī)坐標(biāo)系下的雷達(dá)視線角求解
雷達(dá)的探測(cè)效能與目標(biāo)機(jī)的RCS值是息息相關(guān)的。飛機(jī)的RCS是飛機(jī)的固有屬性,但探測(cè)方向不同,RCS不同,如迎頭和尾后比側(cè)向要小,而側(cè)向要比上視和下視要小。因此求解目標(biāo)機(jī)坐標(biāo)系下的雷達(dá)視線角,可以反映出此時(shí)雷達(dá)探測(cè)視線與目標(biāo)機(jī)的方位關(guān)系,從而反映出不同視線下的RCS對(duì)雷達(dá)探測(cè)效能的影響。
目標(biāo)機(jī)及載機(jī)姿態(tài)角分別為(θm,ψm,rm),(θz,ψz,rz)。其坐標(biāo)系均為該機(jī)地理坐標(biāo)系,因在雷達(dá)視距范圍內(nèi),兩機(jī)距離較近,忽略兩機(jī)地理坐標(biāo)系坐標(biāo)軸方向的誤差。則兩機(jī)相對(duì)姿態(tài)角為:
(20)
從載機(jī)雷達(dá)坐標(biāo)系到目標(biāo)機(jī)體坐標(biāo)系變換可表示為:
(21)
式中:(x,y,z)為雷達(dá)坐標(biāo)系中任意一點(diǎn);(xb,yb,zb)為目標(biāo)機(jī)在雷達(dá)坐標(biāo)系中的坐標(biāo); (xT,yT,zT) 為點(diǎn)(x,y,z)在目標(biāo)坐標(biāo)系中的坐標(biāo);P為從雷達(dá)坐標(biāo)系到目標(biāo)坐標(biāo)系的變換矩陣,其分量由式(22)確定:
(22)
將雷達(dá)坐標(biāo)原點(diǎn)代入式(5)即可算出轉(zhuǎn)換后的坐標(biāo)表示,即:
(23)
式中(xT,yT,zT)為轉(zhuǎn)換后的坐標(biāo)。為了得到其俯仰角和方位角(a,e)還需將上述坐標(biāo)轉(zhuǎn)換為極坐標(biāo),即:
(24)
(25)
(26)
3 測(cè)評(píng)流程
雷達(dá)探測(cè)效能的評(píng)定方法可簡(jiǎn)要概括為:以目標(biāo)機(jī)及載機(jī)的組合導(dǎo)航數(shù)據(jù)為標(biāo)準(zhǔn)參考數(shù)據(jù),通過與雷達(dá)定位數(shù)據(jù)的測(cè)量結(jié)果進(jìn)行對(duì)比,得到雷達(dá)設(shè)備的探測(cè)效能,并研究其誤差變化的規(guī)律。
1)采取相同的時(shí)空基準(zhǔn),采集記錄載機(jī)及目標(biāo)機(jī)的組合導(dǎo)航系統(tǒng)定位數(shù)據(jù),并同步記錄此時(shí)飛機(jī)的速度、加速度、姿態(tài)角等信息。
2)將雷達(dá)穩(wěn)定截獲后的數(shù)據(jù)進(jìn)行記錄,采用相同的時(shí)空基準(zhǔn)對(duì)其數(shù)據(jù)進(jìn)行篩選,統(tǒng)一到同一個(gè)時(shí)間坐標(biāo)系下。
3)按照上文所述方法進(jìn)行坐標(biāo)變換,把目標(biāo)機(jī)的經(jīng)緯高等信息轉(zhuǎn)換到雷達(dá)參考坐標(biāo)系,作為標(biāo)準(zhǔn)參考數(shù)據(jù)。
4)對(duì)雷達(dá)數(shù)據(jù)和導(dǎo)航數(shù)據(jù)進(jìn)行對(duì)比,得出各個(gè)時(shí)刻的探測(cè)誤差。
5)進(jìn)行坐標(biāo)轉(zhuǎn)換,得到各個(gè)時(shí)刻對(duì)應(yīng)的相對(duì)速度、加速度等影響因素,研究雷達(dá)設(shè)備的誤差變化規(guī)律,得到精度評(píng)定結(jié)果。
4 實(shí)驗(yàn)結(jié)果
以某次半物理試驗(yàn)臺(tái)的仿真數(shù)據(jù)為例,通過對(duì)組合導(dǎo)航數(shù)據(jù)和雷達(dá)探測(cè)數(shù)據(jù)時(shí)空歸一化處理,得到本次實(shí)驗(yàn)條件下雷達(dá)探測(cè)效能分析結(jié)果如圖2~圖10所示。由此得出雷達(dá)探測(cè)效能的影響規(guī)律如下:
1)雷達(dá)探測(cè)誤差與探測(cè)距離正相關(guān),距離越大,測(cè)距誤差越大。
2)雷達(dá)探測(cè)誤差與目標(biāo)相對(duì)徑向速度正相關(guān),相對(duì)徑向速度越大,探測(cè)誤差越大。
3)在目標(biāo)坐標(biāo)系下,雷達(dá)探測(cè)誤差在俯仰角接近90°時(shí)較大。
4)相對(duì)加速度與雷達(dá)探測(cè)精度并無明顯的對(duì)應(yīng)關(guān)系。
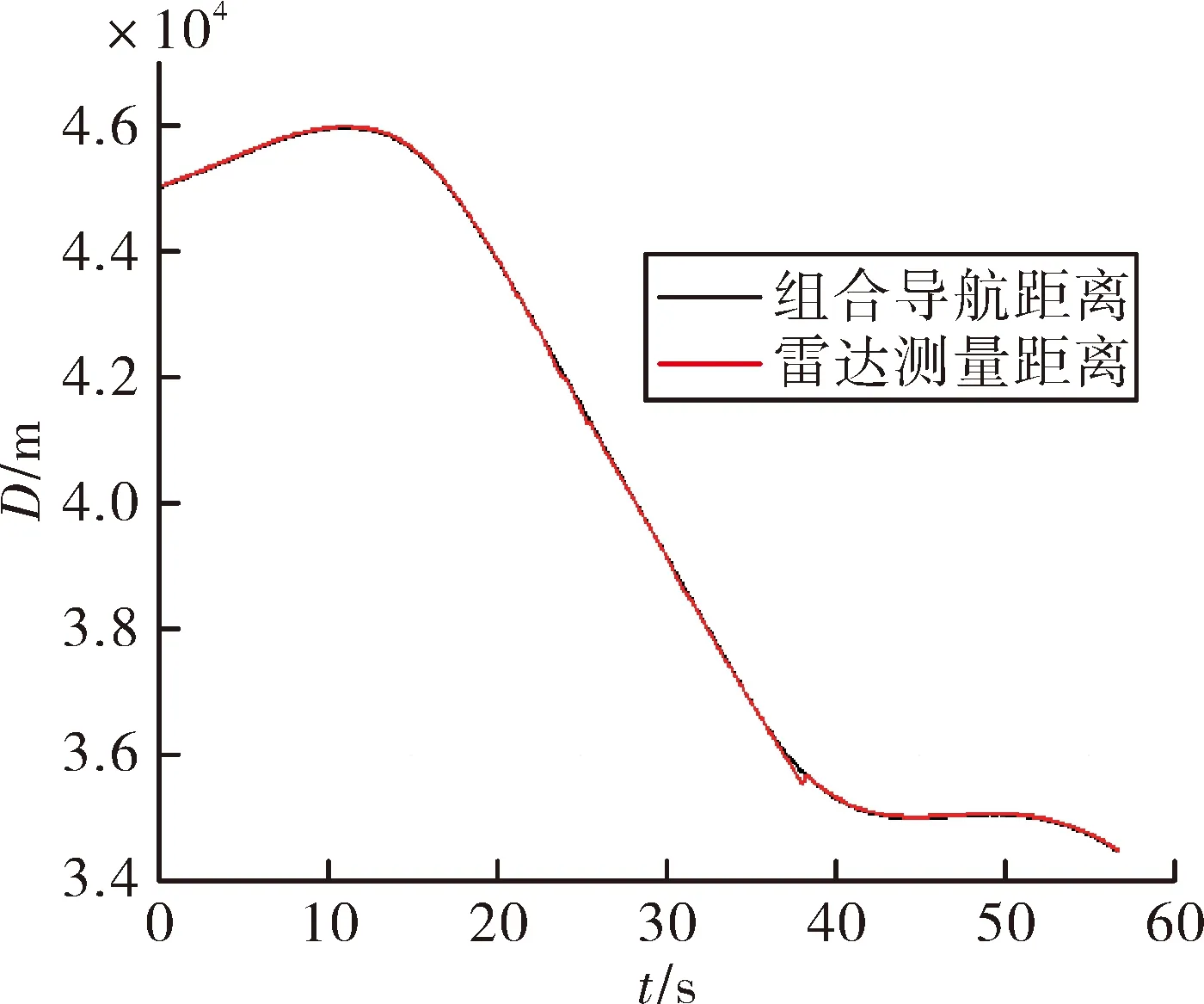
圖2 組合導(dǎo)航與雷達(dá)測(cè)量的目標(biāo)機(jī)距離對(duì)比圖
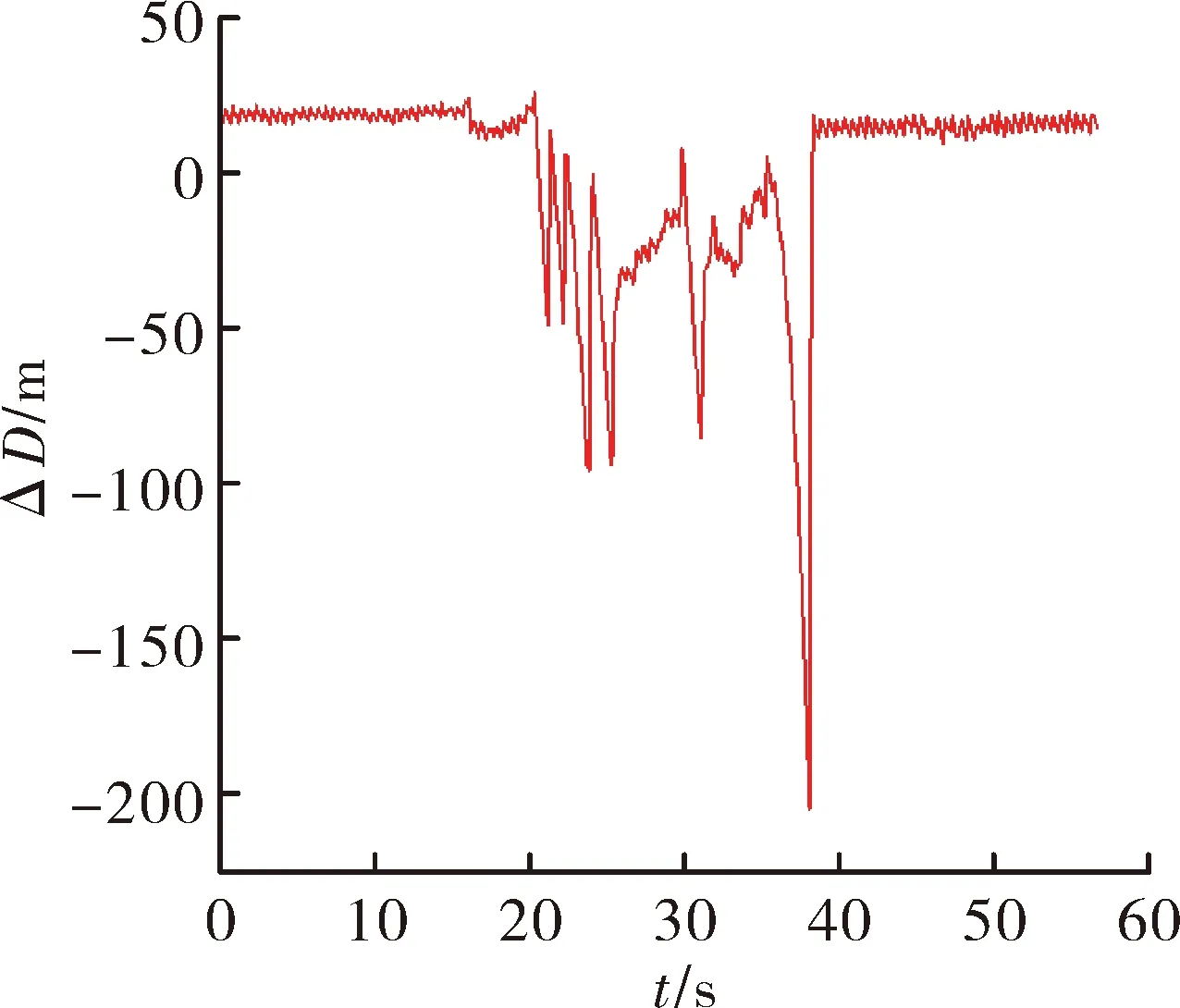
圖3 雷達(dá)的測(cè)距誤差圖
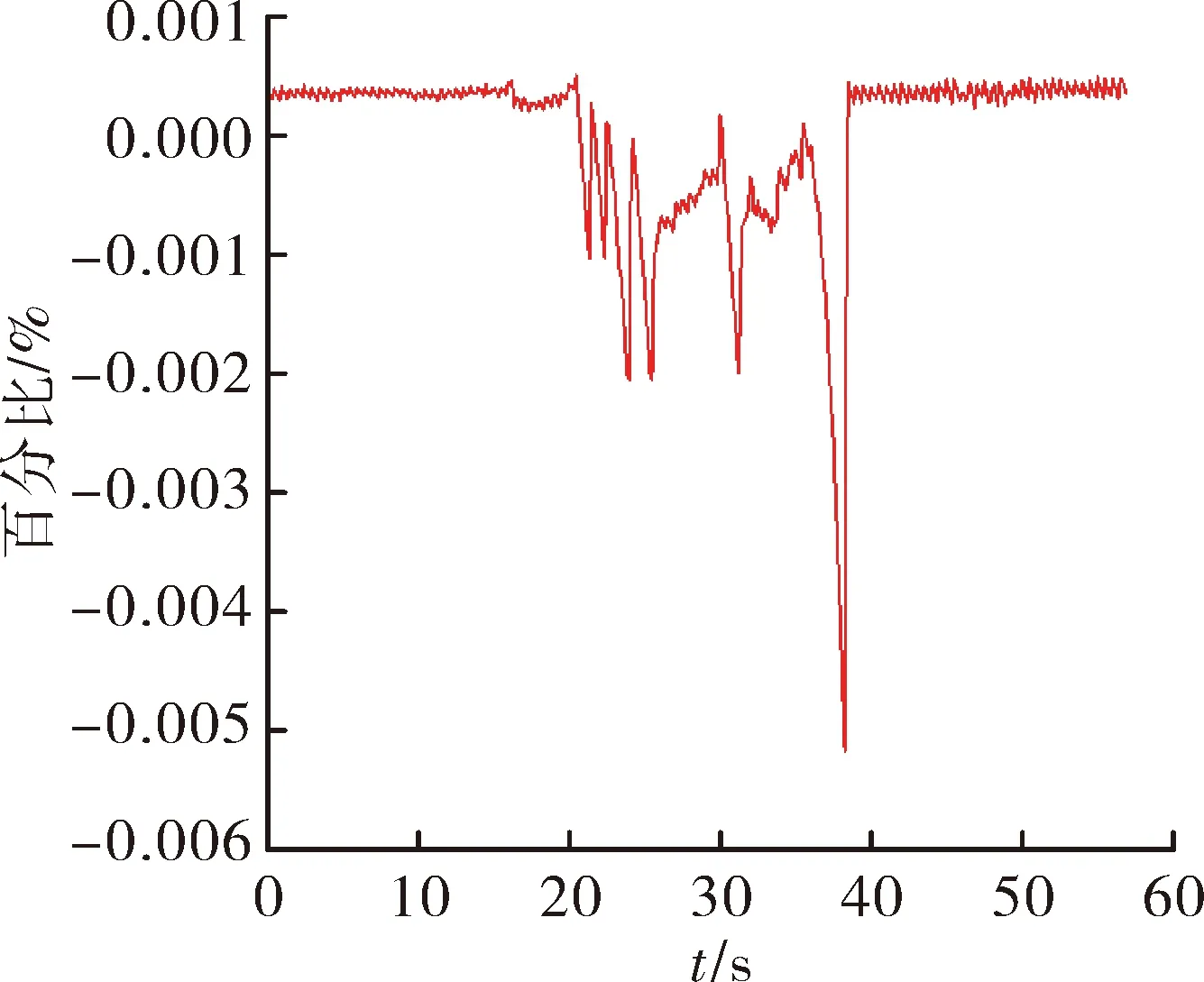
圖4 雷達(dá)的測(cè)距誤差與距離的百分比
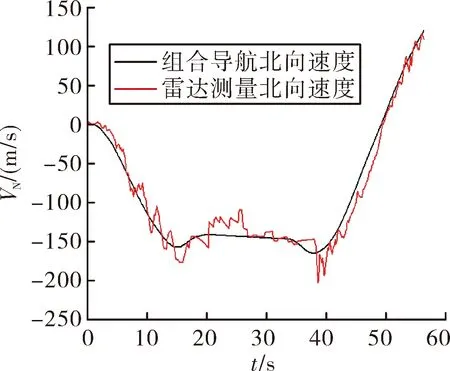
圖5 組合導(dǎo)航與雷達(dá)測(cè)量的目標(biāo)機(jī)北向速度對(duì)比圖
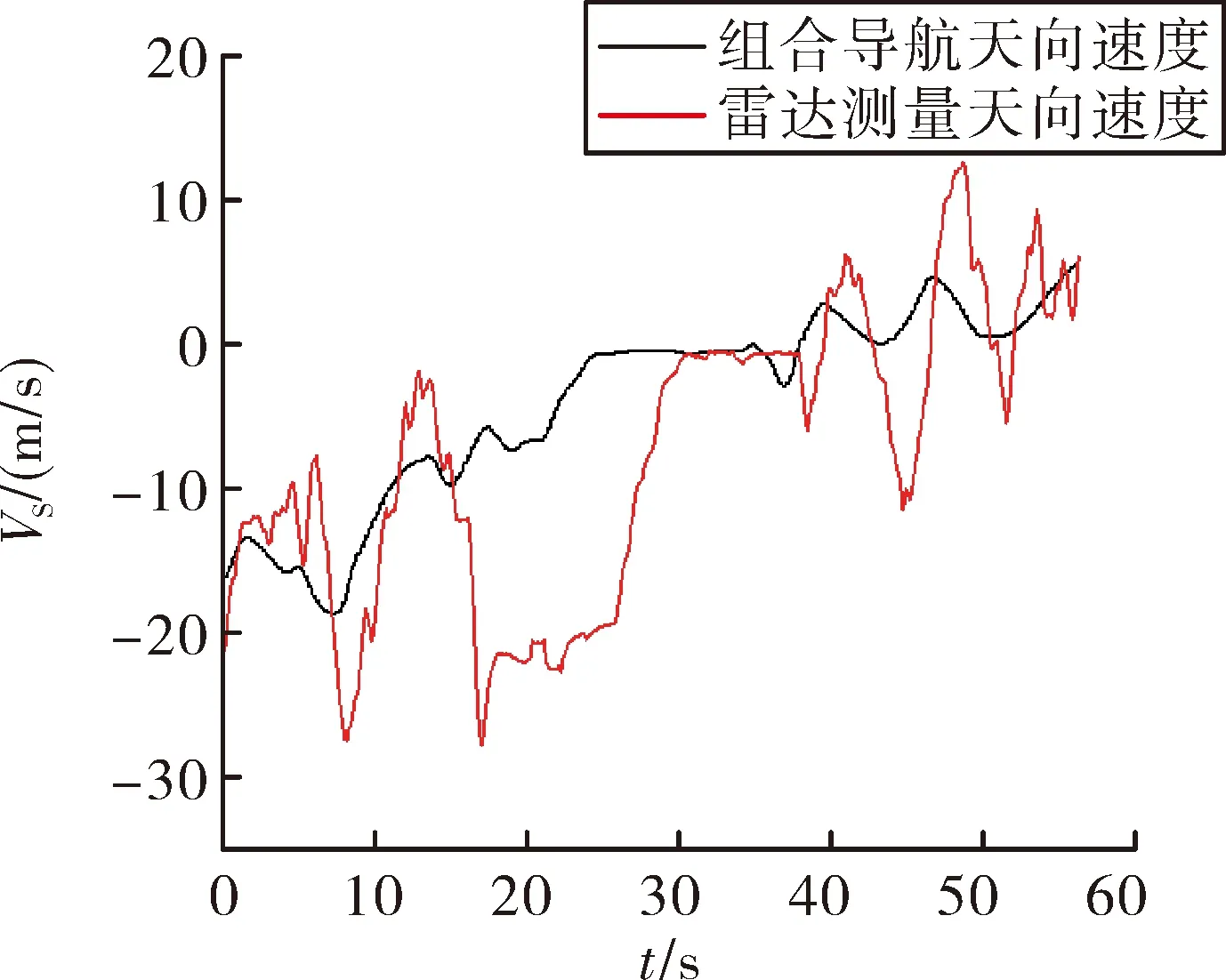
圖6 組合導(dǎo)航與雷達(dá)測(cè)量的目標(biāo)機(jī)天向速度對(duì)比圖

圖7 組合導(dǎo)航與雷達(dá)測(cè)量的目標(biāo)機(jī)東向速度對(duì)比圖
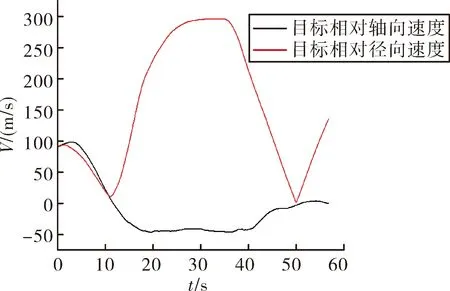
圖8 目標(biāo)相對(duì)速度圖
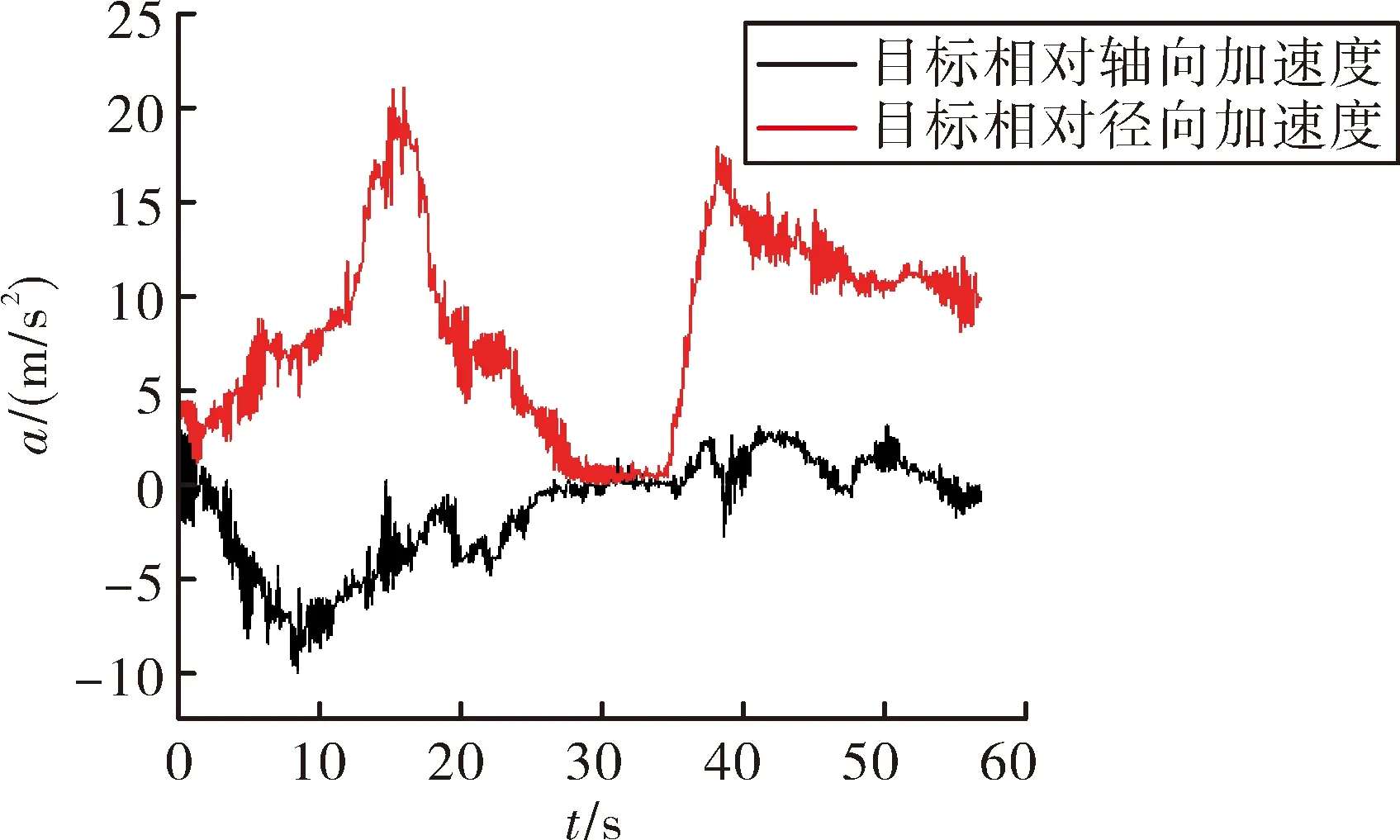
圖9 目標(biāo)相對(duì)加速度圖
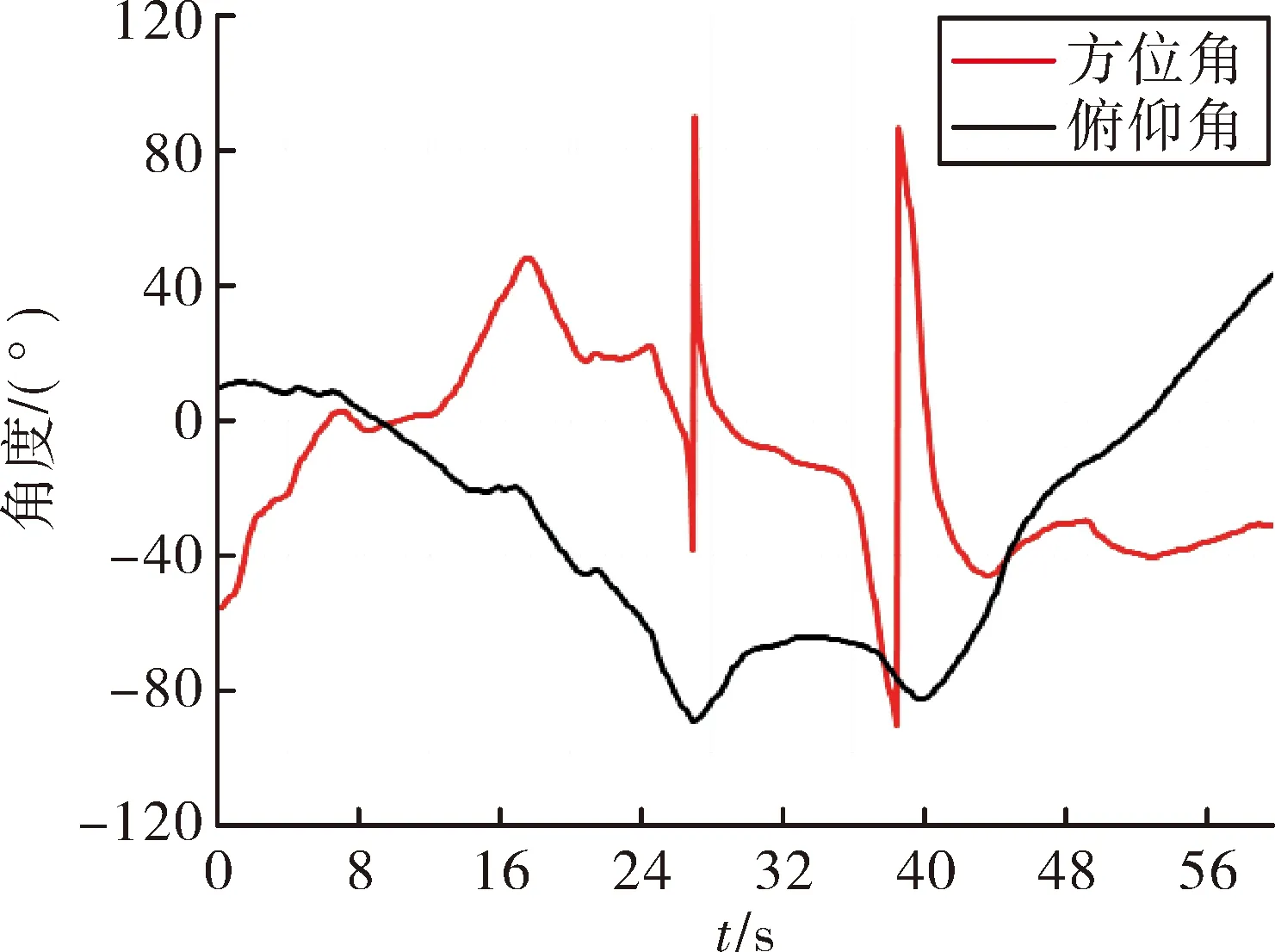
圖10 目標(biāo)坐標(biāo)系下雷達(dá)視線角圖
5 結(jié)束語
對(duì)機(jī)載雷達(dá)在作訓(xùn)及作戰(zhàn)環(huán)境的真實(shí)探測(cè)效能進(jìn)行了評(píng)估并得到了仿真結(jié)果。但雷達(dá)探測(cè)效能是由諸多因素影響決定的,基于本次半實(shí)物仿真數(shù)據(jù)的分析結(jié)論還不夠全面充分,下一步將擴(kuò)大樣本量,結(jié)合仿真數(shù)據(jù)和實(shí)裝數(shù)據(jù)相互印證實(shí)現(xiàn)對(duì)雷達(dá)探測(cè)效能的全面分析,為全面評(píng)估機(jī)載雷達(dá)實(shí)戰(zhàn)效能,進(jìn)一步提升探測(cè)精度提供支持。
