多彈協同攔截制導律設計*
2020-03-29 13:59:48肖念遠王曉芳
彈箭與制導學報 2020年6期
肖念遠,王曉芳,周 健
(1 北京理工大學宇航學院,北京 100081; 2 西安現代控制技術研究所,西安 710065)
0 引言
近年來,空戰武器和一體化防空系統飛速發展,戰場形式日益立體化、復雜化[1]。無人戰機作為重要軍事目標,配備多層次防御體系必要且緊迫[2]。傳統空中防御措施有被動防御(即機動躲避)、主動防御(即釋放紅外干擾彈等)[3]。防御彈機動性能和毀傷能力受限,僅靠單枚彈難攔截敵方襲擊,使得防御可靠性下降。
運用先進技術,無人戰機發射多枚防御彈主動防御,組成協同防御系統,能更有效的攔截[4]。設計滿足需求、適應戰場環境的協同攔截制導律,成了制導技術的研究熱點。協同攔截制導律的主要研究對象有我方目標(無人戰機)、一枚或多枚防御彈、敵方來襲彈。針對目標、來襲彈、防御彈的“三體”[5]問題,一般作為兩個并行制導問題,即來襲彈攻擊目標、防御彈攔截來襲彈[6-7]。文獻[8-9]研究了多枚導彈攔截來襲彈,但所需過載較大。一般情況下,來襲彈機動性能大于防御彈機動性能,存在脫靶量大,攔截失敗的可能。文獻[10-13]提出了不同種類的協同攔截制導律,但建立在線性化基礎上,需預估剩余飛行時間,且攔截的多為靜止目標,不滿足現代戰爭需求。
文中針對該情景,提供一種新的協同攔截思路。建立非線性運動方程組,基于極小值原理和動態逆理論設計兩種制導律,讓無人戰機順序發射兩枚防御彈,防御彈DA與無人戰機采用最優協同制導律OCGL,防御彈DB采用時間協同制導律TCGL,以減小防御彈DA的過載需求,實現兩枚防御彈同時攔截來襲彈,對防御彈發射間隔進行優化,使防御彈DB的攔截能量小且和DA打中M的攔截間隔相差小。
1 問題描述
假設來襲彈、目標(無人戰機)、防御彈在鉛垂面內運動,如圖1所示。
圖1 來襲彈-防御彈-目標相對運動示意圖
圖中,OXY為慣性坐標系,M、T、Di(i=A, B)分別為來襲彈、目標、目標發射的防御彈。Vj、aj、θj(j=M,T,Di)分別表示速度、垂直于速度矢量的加速度和彈道傾角。rMDi和rMT表示M與DA、DB、T之間的距離,qMDi和qMT為對應的視線角。uj為加速度矢量在垂直于視線方向的分量,u′MDi為M加速度在垂直于M-Di視線方向的分量。
M、Di和T的相對運動方程組為:
(1)
設M采用增強比例導引[14](APN),則
(2)
式中,KM為M的制導系數。
2 協同攔截制導律設計
T順序發射DA和DB,T與DA以OCGL飛行,T協同,吸引M飛向DA,DA以小過載攔截M。基于動態逆理論[15-16],令DB以TCGL飛行,DB-M彈目距離與DA-M趨于一致,與DA同時攔截M。
2.1 非線性OCGL設計
由式(1)可知DA與M相對運動方程組為:
(3)
對式(3)求導得:
(4)

(5)
(6)
由圖1可知,u′M與uM之間的轉換關系為:
(7)
式(7)代入式(6)可得狀態方程為:
(8)

(9)
式(9)中,t1、tf為DA的發射和終止時刻,終端指標和動態指標的權重系數分別為a、b、c,有a≥0,b≥0,c≥0。
由性能函數和狀態方程得漢密爾頓方程:
(10)
式中,λ為協態量,正則方程和橫截條件為:
(11)
由極小值原理可知:
(12)
聯立可得最優控制的開環解為:
(13)
將式(13)代回狀態方程積分化簡可得:
(14)
將式(14)代入式(13),得到采用OCGL的DA和T控制指令的閉環解。
2.2 多防御彈TCGL設計
T發射DA后,再發射DB,DB與DA同時命中M。基于動態逆理論,rMDB與rMDA趨于一致,可實現DA和DB的攔截時間協同。
定義彈目距離跟蹤誤差為:
(15)
對式(15)求導可得:
(16)
令實際速度前置角ηDB=qMDB-θDB。基于動態逆理論,設計期望速度前置角ηc為:
(17)
式中,Kr>0為衰減系數。當ηDB=ηc后,聯立式(16)和式(17)得,呈指數衰減,DB的彈目距離趨于實現時間協同。
令E=cosηc,反解ηc為:
(18)
式中:η0為DB的初始速度前置角;ηmax為DB的最大速度前置角。
由于ηDB=qMDB-θDB,求導可得:
(19)
基于動態逆理論設計θDB為:
(20)
式中Kη>0,為衰減系數。
為保證制導精確,考慮DB的導引頭識別距離、制導時間等因素的影響,令DB與M的彈目距離為Δr1時,轉入APN為:
(21)
式中,KDB為APN系數。
3 發射時間優化設計
受發射技術和戰場環境制約,DB無法與DA同時刻發射,假設T先發射DA,再發射DB。由于DB末制導轉APN,故DA、DB到達M的時間有誤差,通過文化算法計算兩枚防御彈發射間隔的最優解,使攔截間隔和DB能量小。
令DA發射時間為t1,DB發射時間為t2,發射間隔為Δt1=t2-t1,優化函數為:
(22)
式中:|Δt2|為DA和DB攔截M的時間差;為DB的控制能量;相應權重d>0,e>0。
設計變量Δt1的邊界約束條件為:
Xmax=Δt1,max,Xmin=Δt1,min
(23)
式中,Δt1,max和Δt1,min為DB發射時間上下限,由戰場形勢與技術能力決定,故優化模型的可行域為:
Ω=[Xmin,Xmax]
(24)
令過載需要滿足的過程約束為:
gj(X)=|nj|-njmax≤0,j=M,T,DA,DB
(25)
式中:nj為需用過載;njmax為可用過載。
綜上分析,發射間隔優化模型為:
(26)
優化模型建立之后,即用文化算法進行優化,得到Δt1的最優解,進而得到DB的發射時間t2=t1+Δt1。
4 仿真分析
4.1 OCGL仿真結果及分析
設t1=0,KM=4,a=1010,b=0.1,c=1。其余條件見表1,仿真結果如圖2~圖4所示。
表1 OCGL仿真初始條件
圖2 OCGL彈道圖
圖3 OCGL過載隨時間變化圖

圖4 OCGL視線角速度隨時間變化圖
由圖2知,在OCGL導引下,T向y軸負方向飛行,引誘M飛向DA。由圖3知,機動能力小的T和DA,成功攔截過載較大的M。圖4所示視線角速度均趨于零,表示OCGL實現對視線角速度的控制。該組結果證明OCGL可以實現低過載防御彈對高過載來襲彈的攔截。
4.2 TCGL仿真結果及分析
在表1的基礎上,令t2=0.5 s,VDB=320 m/s,KMDB=4,Kη=5,Kr=1,ηmax=30°,Δr1=700 m,ηDBmax=20。仿真結果如圖5~圖8所示。
圖5 TCGL彈道圖
圖6 DA和DB的彈目距離差隨時間變化圖
圖7 DB速度前置角變化圖

圖8 TCGL過載變化圖
4.3 Δt1優化結果及分析
結合上面分析,對Δt1進行優化。令d=0.01,e=1 000。設置經過20代迭代,每代10次尋優。邊界約束條件為:0.1 s≤Δt1≤5 s。其余仿真參數同上。
設計不同情形以研究Δt1的影響,場景2為d=0.01,e=0.01;場景3為d=0.001,e=1 000,場景2、3與前述場景1,即d=0.01,e=1 000,優化結果對比如表2所示。
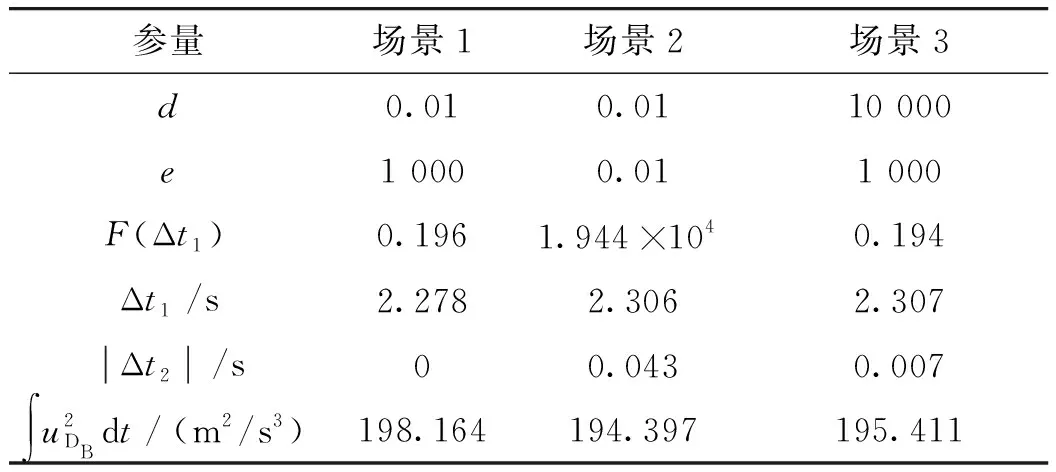
表2 3種場景下的優化結果
對比場景1和場景2,當e減小時,DB付出的能量相對于場景1減小2%。由場景1和場景3可知,當d減小時,|Δt2|=0 s,兩枚防御彈同時攔截M,參數d的改變對于整體結果影響較小,是由于Δt2較小,對于結果影響相對較小導致的。在該場景下,選取發射時間間隔為2.3 s左右即可實現最優。改變優化參數對于結果的選取影響不大,從側面證明了TCGL的適應性和參數的合理性。
5 結論
提出了一種新的協同防御策略。無人戰機順序發射兩枚防御彈,設計OCGL和TCGL攔截來襲彈,優化防御彈發射間隔,針對不同場景得到對應最優解。證明了OCGL攔截來襲彈的過載優勢,TCGL可實現兩枚防御彈同時攔截來襲彈,組合使用能增加對來襲彈的毀傷力度。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
