混凝土布料流量模糊PID控制算法研究
2020-03-24 06:57:30蔣永翔鄧三鵬段景樂孫宏昌祁宇明
天津職業技術師范大學學報 2020年1期
關鍵詞:混凝土
王 彤,蔣永翔,鄧三鵬,段景樂,孫宏昌,祁宇明
(天津職業技術師范大學機器人及智能裝備研究所,天津 300222)
混凝土布料機器人作為改善工人工作環境,提高勞動強度的智能制造設備,精確的流量控制是確保混凝土輸送過程中穩定性和智能性的關鍵。為保證布料均勻,實時布料流量需與機器人工作路徑下的速度相匹配。混凝土是典型的大滯后、非線性流固耦合系統,布料輸送管內部壓力變化會導致大的流量波動,因此僅依靠流體的流動特性很難實現均勻穩定的流量傳送[1]。若混凝土實際流量小于理論流量,澆筑中會因混凝土不足導致裂縫,出現混凝土局部結構酥松,形成類似蜂窩狀的窟窿、孔洞等澆筑缺陷;反之,澆筑量過大則會影響澆筑的平坦性,出現夾層,凹凸不平等現象[2]。這就要求對混凝土流量與穩定性進行精確的控制。
針對這種滯后、非線性流固耦合系統的流量控制,國內外學者研究了PID 控制法[3]、模糊控制法[4]、模糊自整定PID 法[5]、預測模糊PID[6]等方法。文獻[3]將PID 流量控制法應用于凈化過濾機的流量控制中,利用PLC 的連續PID 控制模塊結合變頻調速實現了凈化過濾系統中電解液的PID 流量調節。文獻[4]在研究礦質冶煉進液流量控制系統中運用了模糊流量控制法,闡述了模糊控制系統的結構以及模糊控制器的實現思路,針對尾液濃度對給定進料流量的影響進行了研究。文獻[5]就礦井注水流量控制問題展開研究,針對注水流量自動控制受地層壓力影響所體現的非線性,研究了基于模糊自整定PID 控制算法的注水流量精確控制。需要指出的是,目前的流量控制研究主要針對水、漿、液等小阻力流體,針對混凝土類非牛頓流體的流量控制,國內外研究尚有不足。混凝土流固耦合系統輸送過程中阻力大、能耗多,在管道中的流動阻力根據不同的管壁材料具有較大的差異性。混凝土在流經輸送管道時,除產生拉伸流動、剪切流動外,還伴有滑黏形式的壁面滑移現象[7],因此非牛頓流體的流量控制很難建立數學模型。此外,從PID 控制的關鍵環節流量監測的準確性上看,其以誤差和誤差變化率作為輸入變量,無積分環節,穩態誤差較大,常規的PID 流量控制精度難以保證。因此,本文研究了一種基于模糊PID 的混凝土布料機器人流量控制算法,通過MATLAB fuzzy 工具包仿真獲得了穩定的流量輸出結果。在搭建的布料機器人流量控制系統實驗平臺上進行實驗驗證,得到了穩定的流量輸出。
1 布料機器人流量控制系統設計
混凝土布料流量控制系統框圖如圖1 所示,系統主要由變頻器、電機、蠕動泵,高黏度流量計、模糊PID控制器組成。搭建布料機器人流量控制實驗平臺如圖2 所示。
布料流量控制系統在開始工作時,先啟動變頻調速電機使蠕動泵的轉速達到預期輸送理論流量的轉速值,再通過高粘度流量計[8]監測實際布料流量值[9],將實際測量值與理論值進行比較運算,獲得流量偏差值作為模糊PID 的輸入信號。進而將輸出信號PID 的調節值 ΔKp,ΔKi,ΔKd傳遞到變頻器,使其控制蠕動泵電機的轉速,以實際測量流量值與理論值差值最小為目標,實現流量的調節。
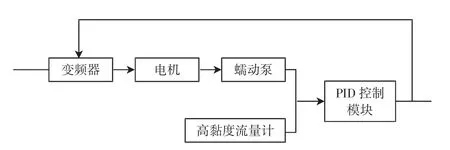
圖1 混凝土布料流量控制系統框圖
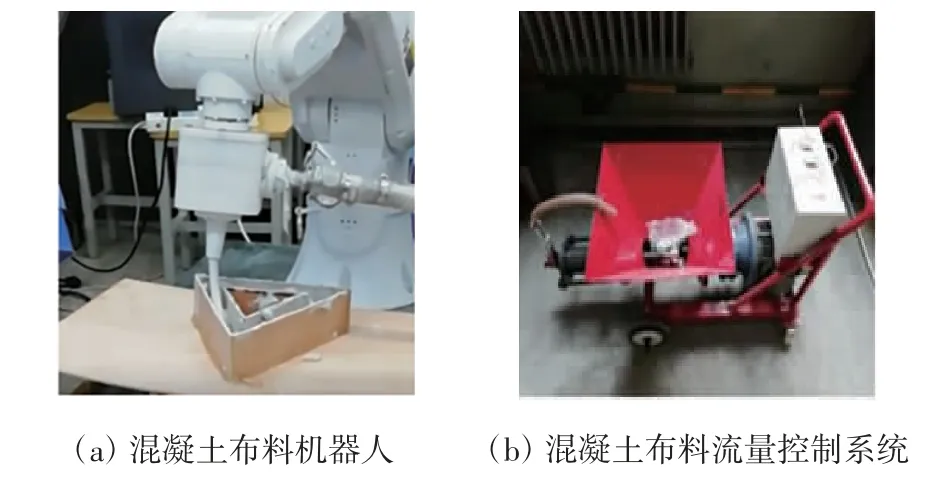
圖2 布料機器人流量控制實驗平臺
2 基于模糊PID的混凝土流量控制算法
2.1 模糊PID算法控制原理
隨著混凝土黏度的增大,流量控制的非線性特性增加,常規PID 算法針對此類流體,控制精度難以滿足要求。模糊控制器具有無需建立被控對象的數學模型以及針對被控對象的非線性適應能力強等優點,可通過自動調整PID 參數達到控制無振蕩的要求。針對混凝土高黏度滯后的非線性特點,采用模糊PID 控制方法,實現對PID 控制器輸出量的整定,達到較高的控制精度,模糊PID 控制原理圖如圖3 所示。

圖3 模糊PID 控制原理圖
模糊PID 控制原理包括以下3 個步驟:
(1)將混凝土流量實際測量值與理論值進行比較運算,其差值和差值變化率作為模糊控制器的輸入;
(2)按照模糊控制規則進行模糊推理,獲得輸入量與輸出控制量的隸屬度表;
(3)經過解模糊化處理得到模糊輸出控制量,作為變頻器的輸入以控制電機轉速[10]。
2.2 模糊PID控制算法的輸入量
2.2.1 混凝土蠕動泵理論布料流量計算
混凝土蠕動泵工作原理圖如圖4 所示,隨著壓輪的轉動,通過壓輪壓緊泵管,使泵管內的流體被擠壓而實現泵對混凝土的輸送[11]。

圖4 混凝土蠕動泵工作原理圖
根據蠕動泵的工作原理,其每轉一圈所運送的混凝土的流量是固定的,所以通過調節泵的轉速即可控制瞬時流量。蠕動泵固定流量的計算圖解如圖5 所示。壓輪轉子由位置A 運動到位置B,輸送混凝土的體積為弧形管道AB 的體積,即

式中:D 為泵殼圓周節圓直徑;V 為弧形管道AB 段的體積;θ 為由 A 到 B 轉動的角度;d 為泵管直徑。
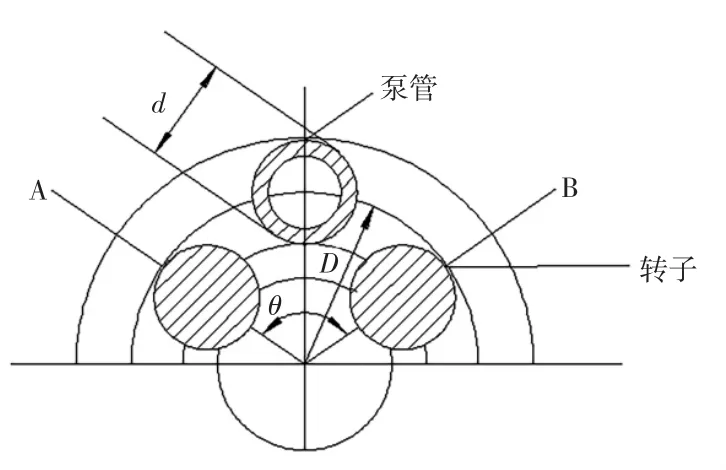
圖5 蠕動泵固定流量的計算圖解
根據式(1),蠕動泵轉動一圈輸送的理論流量為

因此,蠕動泵的理論流量為

式中:Q 為蠕動泵運送混凝土的理論流量(即總流量);n 為蠕動泵所轉圈數。
2.2.2 模糊控制器輸入量的確定
本文中模糊控制器的輸入量是通過蠕動泵電機轉速計算獲得的理論流量值Q 和高黏度流量計監測的實際布料流量值y(k)的差值e(k)和差值變化率Δe(k)所得到的,則

將 e(k)和 Δe(k)輸入到 PID 后,即對其進行模糊化,通過PID 控制器完成流量控制。
2.3 模糊PID控制算法的模糊推理
2.3.1 選擇論域并建立適當的模糊控制規則
基于模糊控制變量設計論域是構建模糊控制規則的前提。現將輸入變量與輸出變量的模糊子集設為負大、負中、負小、零、正小、正中、正大,用字母對應表示為{NB,NM,NS,ZO,PS,PM,PB};則其模糊論域可表示為{-3,-2,-1,0,1,2,3};使之成為一種控制規則庫[12],ΔKp,ΔKi,ΔKd模糊控制規則表如表1所示。第1 個為Kp狀態,第2 個為Ki狀態,第3 個為Kd狀態。
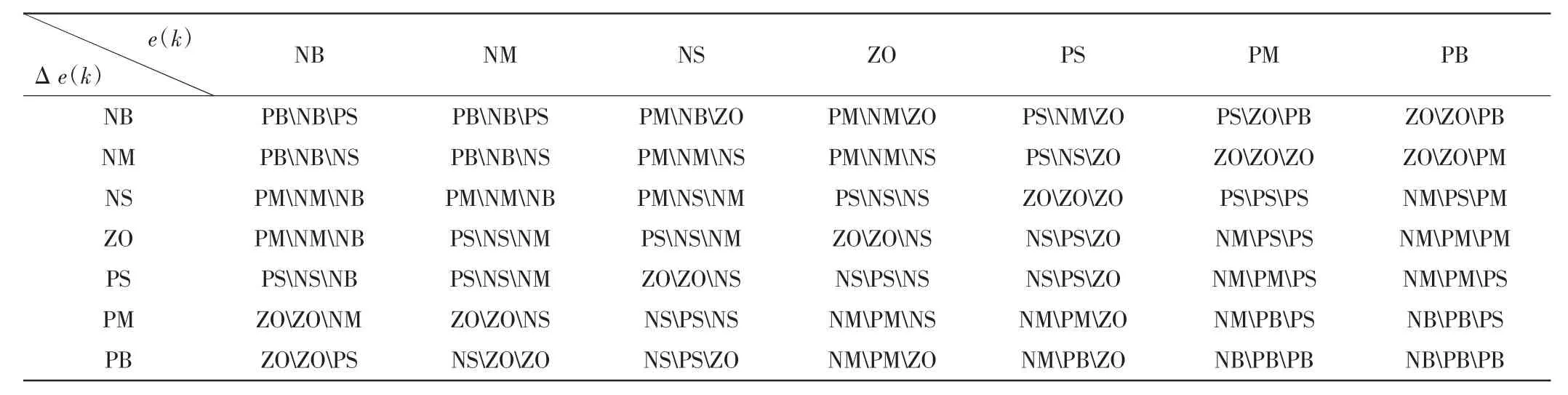
表1 ΔKp,ΔKi,ΔKd 模糊控制規則表
2.3.2 模糊推理
當輸入量 e(k)和 Δe(k)的絕對值較大時 e(k)為大或中,對應論域分別為±大或±中。為了降低調整時間,Kp值應較大(Kp對應論域為 PB、NB);為了防止控制過程中系統出現較大的超調量且保證在系統可控范圍內,應限制積分環節,Ki、Kd值應較小(對應論域為 PS、NS)。
當輸入量 e(k)和 Δe(k)的絕對值適中時,e(k)為中或小,對應論域分別為±正或±中。為了降低調整時間,Kp值應稍微降低(Kp對應論域為 PM、ZO);為了增強控制效果,保證系統響應速度,Ki、Kd值應適中(對應論域分別為PM、NM)。
當輸入量 e(k)和 Δe(k)的絕對值較小時,e(k)為小或0,對應論域分別為±小或0。為了獲得較好穩態性能,Kp、Ki值應較大(對應論域為 PM、NM);此時系統可能出現振動,當誤差趨向減小時,Kd取較大值,(對應論域為PB),當誤差趨向增大時,Kd值為0,(對應論域為ZO)。
2.4 模糊PID控制算法的解模糊化
解模糊化是轉化模糊量為精確量的過程,通過推理獲得模糊集合后從中選取隸屬度最大的量,使其作為清晰量。設A 集合為模糊輸出量,隸屬度函數中有一個最大值μA,則可直接將其確定為清晰量,其對應的數學表達式為

式中:z0為清晰量;z 為模糊量。
假設論域不存在1 個或幾個最大元素,則其清晰值可確定為元素的平均值,通過計算各元素的平均值[13],獲取精確的輸出量 ΔKp,ΔKi,ΔKd。

式中:輸出值ΔKp,ΔKi,ΔKd為初始值與增量修正值的和。
3 布料機器人模糊PID流量控制算法驗證
在Matlab 命令窗口輸入“fuzzy”,選取二維控制結構,將混凝土蠕動泵理論流量與高粘度流量計測得的實際流量值的差值和差值變化率作為輸入[14],將控制變頻器的 ΔKp,ΔKi,ΔKd作為輸出。然后在設計界面將e(k)和 Δe(k)添加到輸入變量,將 ΔKp,ΔKi,ΔKd添加到輸出變量。
根據已定義的輸入變量 e(k)和 Δe(k)的模糊子集,對應的將負大記為NB,將負中記為NM,將負小記為NS,將零記為Z0,正小記為PS;正中記為PM、正大記為PB;同樣定義相關輸出變量的模糊子集。
選取分辨率較高的三角形隸屬函數曲線描述e(k),且輸入變量 Δe(k),輸出變量 ΔKp,ΔKi,ΔKd的隸屬度函數圖像與Δe(k)一致(橫坐標為模糊論域,縱坐標為其對應的隸屬度),如圖6 所示。

圖6 輸入值e(k)的隸屬函數
根據表1 的模糊規則,對3 個輸出量進行自適應校正,列出關于 ΔKp,ΔKi,ΔKd的 49 條模糊控制規則。最終通過此種控制方法得出模糊PID 仿真獲得的流量計算值與高黏度流量計測量值隨時間的變化規律圖如圖7 所示。
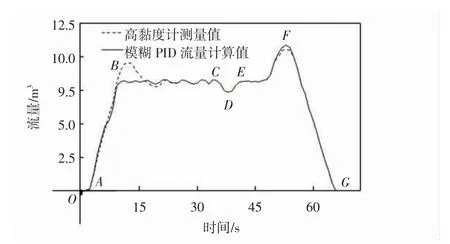
圖7 測量值與計算值的規律圖
仿真計算值與測量值通過模糊PID 調節后流量逐漸穩定[15]。圖中,O-A 段表示當轉速未達到工作轉速時,蠕動泵無法進行送料,因此流量計未檢測出流量;A-B 段表示隨著轉速增大,流量也隨之增加;B-C 段表示當轉速達到某一固定值時,流量值也相對穩定下來,為穩定布料階段[16];C-D-E 段表示由于混凝土中混有雜質,所以會出現點D、E 等波峰、波谷,但在E后,由于模糊PID 的調節作用,也恢復了穩定;F-G 段表示臨近布料結束泵底的混凝土難以輸送,需將轉速繼續調大達到峰值F 點,最終至G 點輸送完畢。
4 結 語
本文設計了一種基于模糊PID 的混凝土布料機器人流量控制算法,通過PID 控制器對蠕動泵的調節實現布料機器人對流量的精確控制,可實現澆筑平整、無孔洞,提高了混凝土澆筑的質量。通過以上驗證可知,采用模糊PID 控制算法實現布料流量控制,突破了混凝土作為大滯后、非線性流固耦合系統難以建模等問題,確保流量在可控范圍內均勻穩定輸送,解決了混凝土布料機器人精確流量控制的問題。
猜你喜歡
現代裝飾(2022年5期)2022-10-13 08:48:04
建材發展導向(2022年10期)2022-07-28 03:04:00
建材發展導向(2021年7期)2021-07-16 07:08:04
水利規劃與設計(2020年1期)2020-05-25 08:01:30
小哥白尼(趣味科學)(2019年3期)2019-06-17 11:57:44
上海建材(2018年3期)2018-08-31 02:27:52
江西建材(2018年2期)2018-04-14 08:01:05
江西建材(2018年2期)2018-04-14 08:00:10
水利技術監督(2017年2期)2017-05-17 05:19:34
水利科技與經濟(2016年2期)2016-04-09 02:09:13