基于動態(tài)面方法的高速列車蠕滑速度跟蹤控制
2020-03-20 00:59:14徐傳芳陳希有李衛(wèi)東
鐵道學(xué)報 2020年2期
徐傳芳,陳希有,鄭 祥,王 英,李衛(wèi)東
(1.大連理工大學(xué) 電氣工程學(xué)院,遼寧 大連 116024;2.大連交通大學(xué) 電氣信息工程學(xué)院,遼寧 大連 116028)
高速列車的安全運行需要可靠穩(wěn)定的牽引力和制動力,牽引力和制動力的形成主要依賴于輪軌間的黏著,而黏著關(guān)系是一個具有非線性、不確定性和時變性的復(fù)雜問題。黏著力的大小由輪軌間的黏著狀態(tài)決定,受到軌面條件、環(huán)境氣候和列車運行狀況等諸多因素的影響。列車跟蹤預(yù)期運行狀態(tài)時,若牽引力或制動力超過輪軌間最大黏著力,則牽引力或制動力與黏著力之間的平衡關(guān)系就會被打破,列車所具有的多余能量會使輪軌間出現(xiàn)相對滑動現(xiàn)象,即出現(xiàn)車輪空轉(zhuǎn)或打滑現(xiàn)象。采取合理有效的黏著防滑控制策略,可避免高速列車牽引和制動過程中的空轉(zhuǎn)和打滑現(xiàn)象,保障列車的行車安全。
鑒于黏著控制問題的重要性,諸多學(xué)者進行了一系列頗有成效的研究。針對黏著力最大控制問題,文獻[1]基于模糊邏輯參考蠕滑率生成算法,設(shè)計自適應(yīng)滑模制動控制策略,可獲得各種路況下的最大黏著力,改善車輛的制動性能;文獻[2]通過調(diào)整工作點接近車輪蠕滑速度與牽引電機轉(zhuǎn)矩電流之間特性曲線的峰值點,提出一種可以尋找輪軌間切向力峰值的防空轉(zhuǎn)控制方法;文獻[3]提出高速列車的魯棒自適應(yīng)再黏著控制策略,能自動調(diào)整控制轉(zhuǎn)矩,快速驅(qū)動列車遠離滑動區(qū)域,進入安全運行區(qū)域并盡量接近最優(yōu)黏著點;文獻[4]借鑒太陽能發(fā)電中的MPPT(Maximum Peak Power Tracking)方法,提出基于P&O(Perturbation and Observation)的新穎黏著控制算法,可得到電力機車加速模式下的最大黏著系數(shù),獲得列車的最大加速度。
當(dāng)高速列車運行在風(fēng)霜雨雪等不利環(huán)境、快速加速或緊急制動情況時,黏著力最大控制問題的研究具有重要的意義。而通常在良好的運行環(huán)境下,并沒有必要獲取最大黏著力。在保證防止車輪滑動的前提下,提供滿足牽引力和制動力要求的黏著力也是一個應(yīng)該關(guān)注的重要問題。為能夠得到滿足牽引力和制動力要求的黏著力,很多學(xué)者提出了針對期望蠕滑率進行精確跟蹤的控制算法。文獻[5]采用魯棒自適應(yīng)容錯控制算法,通過調(diào)節(jié)實際蠕滑率跟蹤參考蠕滑率,實現(xiàn)了高速列車的黏著防滑控制。文獻[6]提出基于自適應(yīng)神經(jīng)網(wǎng)絡(luò)控制的高速列車防滑制動控制方法,通過高精度的蠕滑率跟蹤控制,保證列車獲得大的黏著力及良好的制動性能。文獻[7]考慮防滑限制,設(shè)計基于障礙Lyapunov函數(shù)(BLF)的蠕滑率跟蹤控制方法,可在防止車輪滑動的同時,確保牽引與制動運行穩(wěn)定。然而,蠕滑率與列車狀態(tài)構(gòu)成的非線性函數(shù)存在固有奇點,從而可能導(dǎo)致控制算法中的盲點,影響控制效果,使得利用蠕滑率來表現(xiàn)蠕滑的方式在高速列車黏著控制算法設(shè)計中并非合適的選擇[8]。為此有些學(xué)者基于蠕滑速度跟蹤進行黏著防滑控制算法的設(shè)計。對基于蠕滑速度跟蹤,文獻[9]提出高速列車的自適應(yīng)主動黏著防滑控制算法,文獻[10]提出自適應(yīng)補償控制的黏著防滑控制算法。然而文獻[9]在高速列車動力學(xué)模型的建模過程中并未考慮牽引與制動轉(zhuǎn)矩產(chǎn)生過程;文獻[10]考慮了轉(zhuǎn)矩產(chǎn)生過程,但并未考慮系統(tǒng)在蠕滑速度跟蹤過程中的瞬時性能,雖然可以實現(xiàn)對期望值的精確跟蹤,但并不能確保跟蹤過程中不發(fā)生車輪滑動現(xiàn)象。
針對高速列車能在主動防滑條件下,獲得滿足牽引力和制動力要求的黏著力問題,本文建立了考慮牽引與制動轉(zhuǎn)矩產(chǎn)生過程的高速列車動力學(xué)模型,并將黏著控制問題歸結(jié)為含輸出約束的非線性系統(tǒng)的控制問題,提出了高速列車蠕滑速度的動態(tài)面跟蹤控制算法,并進行了證明。本文在策略中采用了在高速列車黏著控制運用中尚不多見的動態(tài)面控制DSC(Dynamic Surface Control),避免了常規(guī)反步控制中需要對虛擬控制量多次求取微分的困難[11]。未知參數(shù)通過自適應(yīng)更新律估算,未知時變的黏著力和運行阻力由力觀測器估計得到[12],引入BLF實現(xiàn)對蠕滑速度的上界約束[13]。仿真結(jié)果證明,本文算法實現(xiàn)了蠕滑速度跟蹤控制誤差的半全局一致最終有界,可使黏著工作點始終保持在穩(wěn)定區(qū)域,防止由于控制過程中的瞬態(tài)響應(yīng)問題而出現(xiàn)的車輪空轉(zhuǎn)和打滑現(xiàn)象,實現(xiàn)全局主動黏著防滑控制。
1 高速列車動力學(xué)模型描述
1.1 考慮轉(zhuǎn)矩產(chǎn)生過程的高速列車動力學(xué)模型描述
考慮高速列車車輛的1/4模型,并忽略牽引電機-輪對間的轉(zhuǎn)矩傳輸動態(tài),車體及車輪的動態(tài)方程可以表示為
(1)
(2)
式中:M為對應(yīng)模型的列車質(zhì)量;v和ω分別為列車車速和車輪角速度;J和r分別為車輪的等效轉(zhuǎn)動慣量和半徑;B為車輪的黏滯摩擦系數(shù);Tn為牽引電機輸出轉(zhuǎn)矩(列車牽引轉(zhuǎn)矩或制動轉(zhuǎn)矩);Fa和Fr分別為列車的輪軌黏著力和運行阻力。
高速列車的運行阻力Fr包括列車運行過程中所受到的空氣阻力和軌道阻力,表示為
Fr=a0+a1v+a2v2+o(·)
(3)
式中:a0,a1,a2為正數(shù),其數(shù)值由具體的運行環(huán)境決定;o(·)為由軌道引起的隨機不穩(wěn)定阻力干擾。
輪軌黏著力Fa是與列車輪軌接觸面實時狀況有關(guān)的復(fù)雜函數(shù),其表達式為
Fa=μ(λ)Mg
(4)
式中:g為重力加速度;μ(λ)為黏著系數(shù),是蠕滑率λ的非線性函數(shù),國內(nèi)外應(yīng)用較為廣泛的是Burckhardt模型[14],其表達式為
(5)
式中:b1,b2,b3為正數(shù),不同的參數(shù)表示不同的輪軌黏著條件;蠕滑率λ∈[-1,1],表示輪軌之間微量滑行的程度,其定義為
(6)
以往大部分文獻通常忽略轉(zhuǎn)矩產(chǎn)生過程,認(rèn)為Tn即為系統(tǒng)的控制輸入。考慮牽引與制動轉(zhuǎn)矩產(chǎn)生過程更符合實際情況。由于電機的電磁時間常數(shù)遠遠小于列車的機械時間常數(shù),因此沒有必要考慮轉(zhuǎn)矩產(chǎn)生的具體細節(jié),其過程可以近似用一個簡單的線性方程來描述[10],牽引與制動轉(zhuǎn)矩的動態(tài)響應(yīng)可以表示為
(7)
式中:Tz為期望的電機轉(zhuǎn)矩,為控制變量;α,β為已知或未知常數(shù)。
由式(1)、式(2)和式(7)可得
(8)
(9)
1.2 防滑約束問題描述
高速列車的黏著特性具有高度非線性,不確定性和隨機性等特點。圖1為干燥和潮濕軌面條件下的黏著特性曲線。可以看出,牽引與制動過程的黏著特性機理是一致的。在蠕滑區(qū)范圍內(nèi),黏著系數(shù)隨著蠕滑率的增大而逐漸增大,直至峰值;當(dāng)蠕滑率超過峰值,進入滑移區(qū)后,黏著系數(shù)隨著蠕滑率的增大而急劇減小,此區(qū)域是打滑或空轉(zhuǎn)區(qū)間,需要盡量避免列車進入此區(qū)域。在高速列車運行過程中,若能保持其蠕滑率始終在蠕滑區(qū)范圍內(nèi),則可避免出現(xiàn)危害列車運行安全的空轉(zhuǎn)或打滑現(xiàn)象。
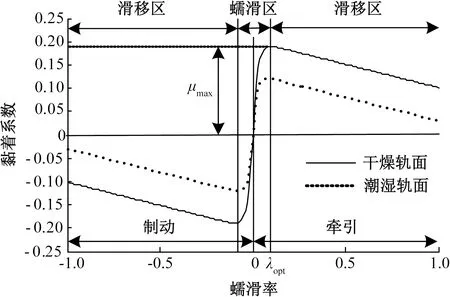
圖1 干燥和潮濕軌面條件下的黏著特性曲線
輪軌間黏著防滑約束條件可以表示為
|λ|<λopt
(10)
式中:λopt為最優(yōu)蠕滑率,其定義為
λopt=argmax[μ(λ)]
(11)
在式(10)約束下,列車實際工作點可以嚴(yán)格限制在穩(wěn)定可靠的蠕滑區(qū)內(nèi),實現(xiàn)牽引力或制動力的有效傳遞。因此,若能設(shè)計滿足式(10)約束,同時實現(xiàn)蠕滑率λ對期望蠕滑率λ*精確跟蹤的控制算法,則可以保證蠕滑率始終保持在蠕滑區(qū)域內(nèi),在防止車輪滑動的前提下,提供滿足牽引力和制動力要求的黏著力。
由式(6)可知,蠕滑率存在奇點,并非一致連續(xù)可導(dǎo),因此利用蠕滑率來表現(xiàn)蠕滑,可能導(dǎo)致控制算法中的盲點,影響控制效果[8],而蠕滑速度為
vs=ωr-v
(12)
結(jié)合式(6)可得
vs=max(ωr,v)λ
(13)
因此,可以選擇蠕滑速度代替蠕滑率來表示蠕滑現(xiàn)象,設(shè)計控制算法,避免函數(shù)非一致連續(xù)可導(dǎo)問題。式(10)所示的黏著防滑約束條件等效為
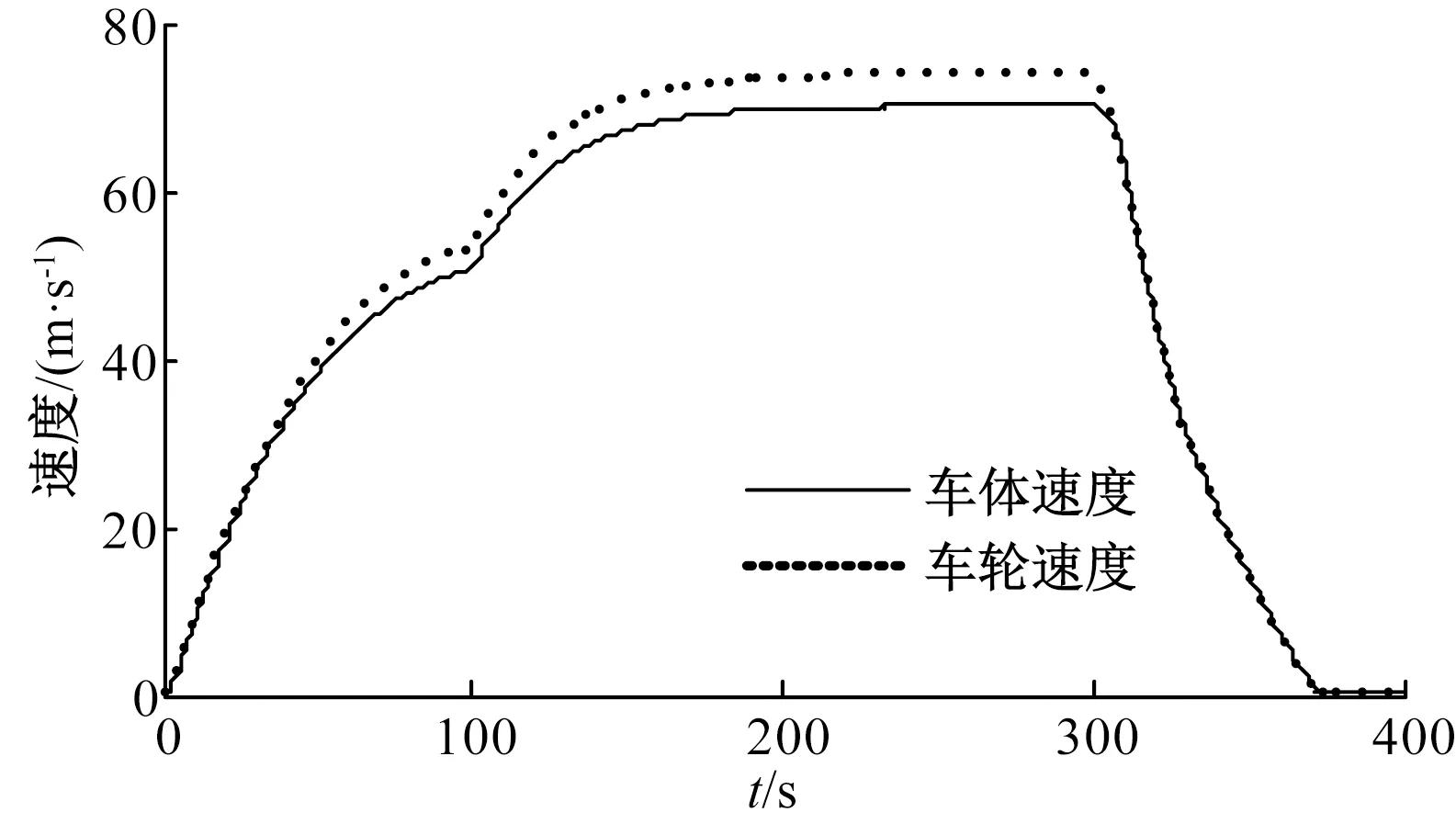
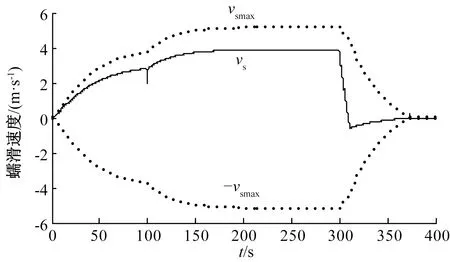
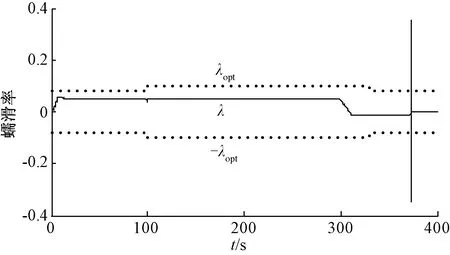
|vs| (14) 由于輪軌之間復(fù)雜的黏著關(guān)系,精確的最優(yōu)蠕滑率λopt難以獲得,公式(14)不能直接應(yīng)用于控制器設(shè)計。因此,將黏著防滑約束條件定義為 |vs| (15) 式中:λallow>0,為允許蠕滑率的上限,可以根據(jù)大量的實驗或經(jīng)驗估計得到,其中 (16) 式中:v0>0,是由設(shè)計者選定的一個很小的常數(shù)。 至此,考慮牽引與制動轉(zhuǎn)矩產(chǎn)生過程和黏著防滑約束的高速列車動力學(xué)模型可由式(1)、式(2)、式(7)以及式(15)來描述。同時,控制目標(biāo)轉(zhuǎn)化為設(shè)計控制策略使得在式(15)所示約束條件下,實現(xiàn)蠕滑速度vs對期望蠕滑速度vs*的精確跟蹤。 δ=vsmax-|vs*|=vbλallow-|vs*|>0 (17) 高速列車的輪軌黏著力Fa和非線性運行阻力Fr難以參數(shù)化或測量得到,本文利用干擾觀測器原理設(shè)計兩個力觀測器得到Fa和Fr的估計值分別為[12] (18) (19) 假設(shè)2:o(·)有界,其引入的擾動項不會對列車運行造成完全不可控的影響。 考慮式(15)約束下,式(1),式(2)和式(7)所表示的列車動態(tài)模型,借鑒反步控制逐層設(shè)計虛擬控制量的思路,引入一階低通濾波器實現(xiàn)動態(tài)面控制,引入BLF處理輸出約束問題,由此,本文提出高速列車蠕滑速度的動態(tài)面跟蹤控制算法,設(shè)計步驟為: Step1定義實際蠕滑速度vs與期望蠕滑速度vs*之間的跟蹤誤差變量為evs,即 (20) 其誤差動態(tài)方程為 (21) 選取對數(shù)型BLF函數(shù) (22) 設(shè)系統(tǒng)的起始狀態(tài)vs(0),滿足evs(0)∈(-δ,δ)。對式(22)進行求導(dǎo)可得 (23) (24) 式中:k1為正實數(shù);L1和L2為集總參數(shù)項,其中 (25) (26) (27) 式中:τd>0,為時間常數(shù)。 Step2定義eT=Tn-Tnd,對其求導(dǎo),并結(jié)合式(9)可得 (28) (29) (30) 以上控制律設(shè)計中假設(shè)α,β均已知。若α,β未知,可以設(shè)計自適應(yīng)律來估算其值。 (31) (32) (33) 式中:k2為正實數(shù)。 設(shè)計向量參數(shù)ea的自適應(yīng)更新律為 (34) 式中:θ2為正實數(shù)。 定義濾波誤差為 (35) 結(jié)合式(27),濾波誤差的動態(tài)方程為 (36) (37) 證明:對V求導(dǎo)可得 (38) 由式(23)、式(24)、式(35)以及Young不等式可得 (39) 由式(32)~式(34)可得 (40) 應(yīng)用不等式 (41) 進一步可得 (42) 由文獻[17]可知,對于任何正實數(shù)δ,若|evs|<δ,則下列不等式成立 (43) 將式(37)、式(39)和式(42)代入式(38),并結(jié)合式(43),可得 (44) (45) (46) 進一步可得到 (47) (48) 需要說明的是,雖然在穩(wěn)定性證明中涉及未知參數(shù)α,β,εd和η,但是控制算法并不需要用到這幾個參數(shù)的實際值;常數(shù)k2的取值范圍中雖然含有未知參數(shù)α和β,但只要k2取值足夠大,可以滿足算法要求。 需注意的是,當(dāng)|vs|≥vsmax或|vs|≤vsmax-2δ時,|evs(0)|≥δ(0),不滿足以上控制算法對于|evs(0)|<δ(0)的要求,此時系統(tǒng)的穩(wěn)定性將變得不確定。 (49) 為了得到改進的統(tǒng)一全局控制算法,定義變量q (50) 結(jié)合式(24)、式(49)及式(50),設(shè)計虛擬控制量可寫為 (51) 定理2對式(1)、式(2)、式(7)和式(15)所表示的高速列車動力學(xué)模型,采用全局防滑控制算法,設(shè)計動態(tài)面控制律為式(33),虛擬控制量為式(51),未知參數(shù)自適應(yīng)更新律為式(34),雙力觀測器為式(18)和式(19),若假設(shè)1~假設(shè)3成立,初始條件滿足對于任意正數(shù)p,有V0(0)≤p,則存在設(shè)計常數(shù)k1,k2,τd,θ2和常數(shù)矩陣Γ,使得閉環(huán)系統(tǒng)跟蹤誤差evs半全局一致最終有界,通過選取滿足條件的合適設(shè)計參數(shù),系統(tǒng)的穩(wěn)態(tài)跟蹤誤差可以任意小,而且:(1)若|vs(0)| 證明:分3種情形進行證明。 (52) 對其求導(dǎo),并結(jié)合式(21)、式(37)、式(42)、式(51)以及Young不等式可得 (53) (54) (55) 情形3:當(dāng)|vs(0)|≥vsmax(0)時,同樣構(gòu)造式(52)所示的Lyapunov函數(shù),參考情形2證明,易知evs是半全局一致最終有界的,只要設(shè)計參數(shù)合理,|evs|總能在有限時間T內(nèi)進入|evs|<δ范圍內(nèi),一旦進入|evs|<δ范圍,控制器變?yōu)榍樾?。因此t>T后,蠕滑速度不會再超出設(shè)定上限,系統(tǒng)的跟蹤誤差evs可以任意小。 綜合上述3種情況,在高速列車運行過程中,采用定理2所述黏著控制算法,系統(tǒng)的蠕滑速度跟蹤誤差evs半全局一致最終有界穩(wěn)定,取適當(dāng)?shù)目刂破鲄?shù),evs可以任意小。當(dāng)|vs(0)| (56) 為了驗證本文所提出建模與控制方法的有效性,應(yīng)用MATLAB(R2013a)軟件進行了計算機仿真驗證。考慮列車車輛的1/4模型,具體實驗對象參數(shù)見表1[9]。 表1 模型實驗對象參數(shù) 為了模擬軌面突變情況下控制算法的有效性,采用干燥和潮濕兩種不同軌面,黏著特性曲線如圖1所示。具體設(shè)置情況見表2[9],表中輪軌黏著條件參數(shù)見式(5)。 表2 黏著特性曲線參數(shù)值 在高速列車的制動階段(300 s以后),ω>0.1 rad/s時,取 本次仿真模擬高速列車在400 s時間內(nèi)的運行過程,其中0~300 s為高速列車的牽引階段,300 s以后為制動階段。軌面狀態(tài)變化分別發(fā)生在100 s(由潮濕軌面到干燥軌面)和330 s(由干燥軌面到潮濕軌面)。圖2為高速列車運行過程中的車體速度和車輪速度曲線。圖3和圖4分別為高速列車的牽引與制動轉(zhuǎn)矩Tn以及期望的牽引與制動轉(zhuǎn)矩Tnd曲線。可以看出,列車經(jīng)過200 s左右的牽引加速階段,速度從0上升到大約69 m/s,然后接下來的100 s為高速列車的巡航階段,300 s以后為列車的制動階段,大約經(jīng)過72 s列車速度下降到0。在整個控制過程中,即使是在兩次軌面狀況突變時,所設(shè)計的控制算法也能夠及時適當(dāng)?shù)恼{(diào)整列車的牽引與制動轉(zhuǎn)矩,使其很好的跟蹤期望值,列車車體速度以及車輪速度均變化平滑,車輪沒有出現(xiàn)滑動現(xiàn)象。 圖2 列車車體和車輪速度曲線 圖3 列車牽引與制動轉(zhuǎn)矩曲線 圖4 期望牽引與制動轉(zhuǎn)矩曲線 圖5 蠕滑速度軌跡曲線 圖6 蠕滑速度局部軌跡曲線 圖7 蠕滑率軌跡曲線 圖8為高速列車蠕滑速度跟蹤誤差軌跡曲線。由圖8(a)可以看出,即使是在軌面狀態(tài)突變時,蠕滑速度跟蹤誤差evs也沒有超出界限,始終被限制在(-δ,δ)之間。圖8(b)為穩(wěn)態(tài)誤差局部放大圖,可以看出穩(wěn)態(tài)跟蹤誤差接近于0。 圖8 蠕滑速度跟蹤誤差軌跡曲線 本文提出的算法實現(xiàn)了高速列車的主動黏著防滑控制,當(dāng)高速列車的初始狀態(tài)沒有發(fā)生空轉(zhuǎn)或打滑現(xiàn)象時,可以實現(xiàn)高速列車在運行過程中蠕滑速度始終不超過給定最大蠕滑速度上界,不會發(fā)生車輪滑動現(xiàn)象;當(dāng)高速列車的初始狀態(tài)發(fā)生空轉(zhuǎn)或打滑現(xiàn)象時,系統(tǒng)會在有限時間內(nèi)進入到蠕滑區(qū),此后不會再發(fā)生車輪滑動現(xiàn)象。算法對期望蠕滑速度實現(xiàn)了較好跟蹤,穩(wěn)態(tài)跟蹤誤差可以任意小。該算法可以有效主動避免高速列車在運行過程中可能出現(xiàn)的空轉(zhuǎn)和打滑現(xiàn)象,提高列車運行的安全與可靠性能。 本文建立了考慮牽引與制動轉(zhuǎn)矩產(chǎn)生過程的高速列車動力學(xué)模型,將黏著防滑問題描述為含輸出約束的非線性系統(tǒng)的跟蹤控制問題,采用力觀測器估計未知時變的黏著力和運行阻力,采用自適應(yīng)律實現(xiàn)對未知參數(shù)的估算,引入BLF函數(shù)實現(xiàn)對蠕滑速度上界的限制,設(shè)計了高速列車蠕滑速度的動態(tài)面跟蹤控制算法,實現(xiàn)了高速列車的全局主動黏著防滑控制。仿真結(jié)果表明,本文所提控制方法,能在對蠕滑速度進行上界約束的同時,產(chǎn)生滿足牽引力和制動力要求的黏著力,蠕滑速度跟蹤誤差可以任意小,可保障黏著控制系統(tǒng)的穩(wěn)定性。該算法同樣可以應(yīng)用于最佳蠕滑速度(或最佳蠕滑率)的精確跟蹤,獲取最大黏著力,實現(xiàn)列車的最優(yōu)黏著防滑控制。2 蠕滑速度跟蹤控制算法設(shè)計及穩(wěn)定性分析
2.1 基本控制算法設(shè)計及穩(wěn)定性分析









2.2 全局控制算法設(shè)計及穩(wěn)定性分析


3 仿真結(jié)果與分析








4 結(jié)束語