基于Adams的管道機器人自適應機構優化設計
2020-03-13 20:58:00薛耀勇張繼忠王慶前于祥鞏健
青島大學學報(工程技術版) 2020年1期
關鍵詞:優化設計
薛耀勇 張繼忠 王慶前 于祥 鞏健


摘要:??為了增強履帶式管道機器人自適應機構的傳力能力,本文優化設計了管道機器人的自適應機構。通過對自適應機構的運動原理進行表述以及對機構進行動力學分析,建立自適應機構的優化設計數學模型。同時,以Adams中參數化建模與優化設計的模塊為工具,以對優化目標影響較大的機構參數為優化變量,以機構的結構和運動要求為約束條件,以自適應機構在適應管徑過程中對管壁壓力最大為目標,對管道機器自適應機構進行優化設計。優化結果表明,優化后自適應機構對管壁壓力較優化前提高了11.3%,比較明顯的提高了自適應機構傳遞力的能力,增強了管道機器人爬行能力。該研究為履帶式管徑自適應管道機器人的后續開發奠定了基礎。
關鍵詞:??管道機器人;?Adams;?自適應機構;?優化設計
中圖分類號:?TP241.3?文獻標識碼:?A
收稿日期:?2019-03-08;?修回日期:?2019-06-22
作者簡介:??薛耀勇(1992-),男,山東東營人,碩士研究生,主要研究方向為機械設計及理論。
通信作者:??張繼忠(1964-),男,教授,主要研究方向為機械系統數字化設計。Email:?zjzqdu@163.com
管道廣泛應用于石油和天然氣等眾多工業領域中,而管道機器人作為檢測、維護、清潔等管道作業的載體得到廣泛應用[1]。履帶式機器人能很好地適應管道的變化,具有良好的機動性能,在越障和爬行等方面具有較明顯的優勢,成為國內、外相關領域研究的重點[2-5]。目前,許多發達國家對各類管道機器人的研究處于領先地位。美國卡內基梅隆大學與美國國家能源部聯合研制了ExplorerⅡ,它是以漏磁與視覺雙層檢測為手段、無纜線、支撐輪式的煤氣管道機器人[6];韓國成均館大學研制開發的MRINSPECT管道機器人,利用支撐機構與雙主動萬向節使其得以在T型接頭與彎頭管道中行走[7-8]。近年來,國內許多大學和研究所對多種管道機器人進行研究。唐德威等人[9]通過對機器人在管道內的運動學和動力學進行分析,研發了一種具有自適應功能的管道機器人,在彎管處各行走輪具有良好的功率分配與速度協調能力;施邵寧等人[10]以三軸差速理論為基礎,開發設計了一款新型除銹管道機器人;張云偉等人[11]研發了一種利用絲杠螺母進行傳動、平行四邊形桿系支撐行走輪進行漏磁檢測的管道機器人;李鵬等人[12]設計研究了一種螺旋驅動自適應機器人,有效地解決了機器人在越障方面的問題;費振佳等人[13]研制開發了一種履帶式管道機器人,并對其進行了動力學仿真分析;王琪等人[14]采用Adams軟件中的參數化建模和分析功能,對碼垛機器人機構進行優化設計,提高了機構設計效率,縮短了設計周期;焦方坤等人[15]優化設計了一種相貫線埋弧焊接機器人,通過Adams軟件進行仿真分析,提高了系統的整體性能;朱華炳等人[16]采用多體動力學分析軟件Adams,建立一種工業機器人虛擬樣機模型,并進行運動仿真分析,獲得機器人末端點運動的位移和速度曲線,為機器人的設計和研究提供了重要依據。機器人結構優化設計能夠增強整機性能,提高機構動力傳遞效率[17-20]。基于此,本文給出了管道機器人自適應機構工作原理,并對機構進行動力學分析,建立自適應機構的優化設計數學模型,同時利用Adams對其進行結構參數的優化設計。該研究為履帶式管徑自適應管道機器人的后續開發提供了理論基礎。
1?自適應機構工作原理及動力學分析
1.1?自適應機構工作原理
為保證機器人能夠正常豎直向上爬行,在履帶式管道機器人自適應機構適應管道直徑變化過程中,需要
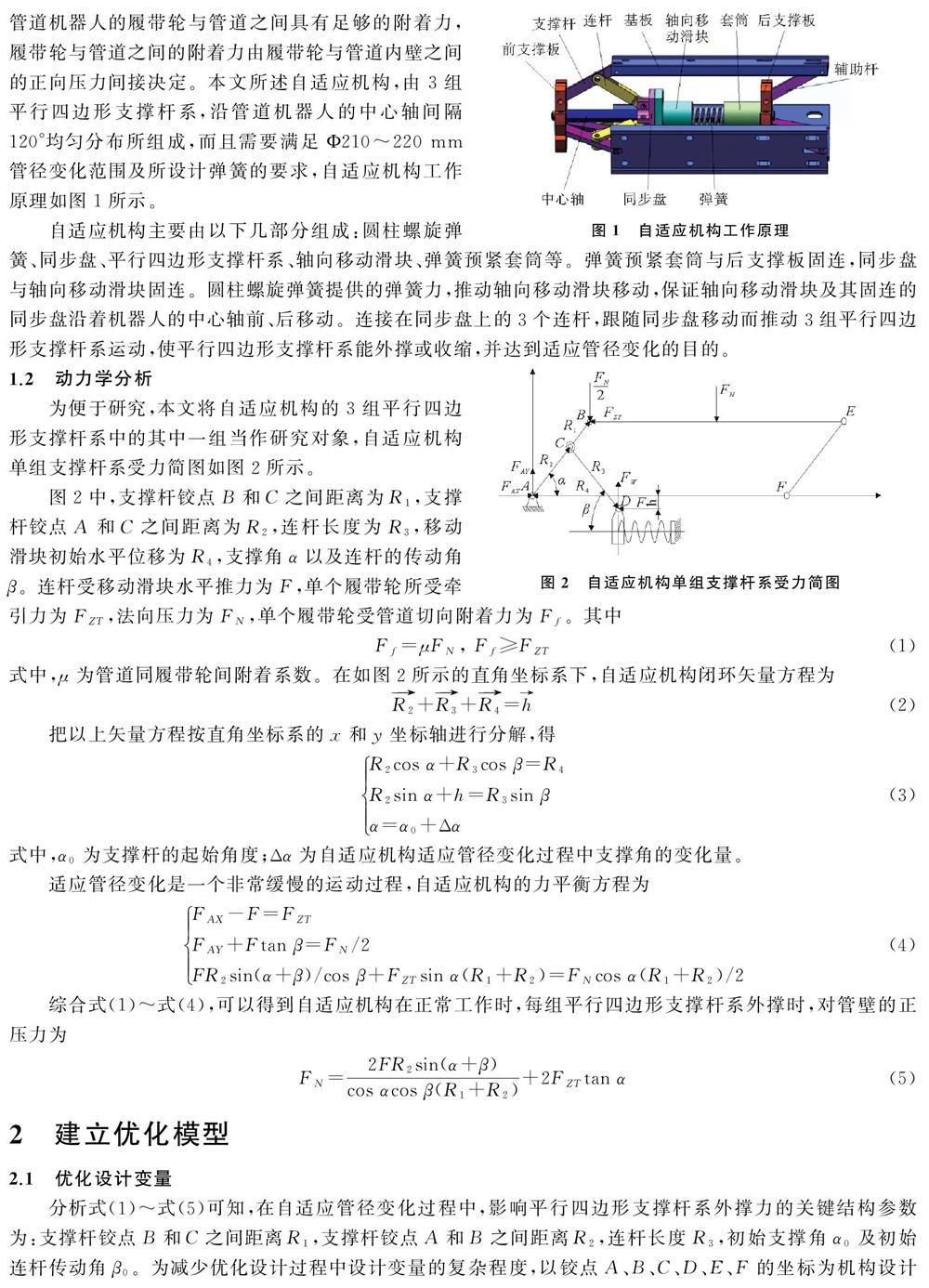
管道機器人的履帶輪與管道之間具有足夠的附著力,履帶輪與管道之間的附著力由履帶輪與管道內壁之間的正向壓力間接決定。本文所述自適應機構,由3組平行四邊形支撐桿系,沿管道機器人的中心軸間隔120°均勻分布所組成,而且需要滿足Ф210~220?mm管徑變化范圍及所設計彈簧的要求,自適應機構工作原理如圖1所示。
自適應機構主要由以下幾部分組成:圓柱螺旋彈簧、同步盤、平行四邊形支撐桿系、軸向移動滑塊、彈簧預緊套筒等。彈簧預緊套筒與后支撐板固連,同步盤與軸向移動滑塊固連。圓柱螺旋彈簧提供的彈簧力,推動軸向移動滑塊移動,保證軸向移動滑塊及其固連的同步盤沿著機器人的中心軸前、后移動。連接在同步盤上的3個連桿,跟隨同步盤移動而推動3組平行四邊形支撐桿系運動,使平行四邊形支撐桿系能外撐或收縮,并達到適應管徑變化的目的。
1.2?動力學分析
為便于研究,本文將自適應機構的3組平行四邊形支撐桿系中的其中一組當作研究對象,自適應機構單組支撐桿系受力簡圖如圖2所示。
圖2中,支撐桿鉸點B和C之間距離為R1,支撐桿鉸點A和C之間距離為R2,連桿長度為R3,移動滑塊初始水平位移為R4,支撐角α以及連桿的傳動角β。連桿受移動滑塊水平推力為F,單個履帶輪所受牽引力為FZT,法向壓力為FN,單個履帶輪受管道切向附著力為Ff。其中
Ff=μFN,?Ff≥FZT(1)
式中,μ為管道同履帶輪間附著系數。在如圖2所示的直角坐標系下,自適應機構閉環矢量方程為
R2+R3+R4=h(2)
把以上矢量方程按直角坐標系的x和y坐標軸進行分解,得
R2cos?α+R3cos?β=R4R2sin?α+h=R3sin?βα=α0+Δα(3)
式中,α0為支撐桿的起始角度;Δα為自適應機構適應管徑變化過程中支撐角的變化量。
適應管徑變化是一個非常緩慢的運動過程,自適應機構的力平衡方程為
FAX-F=FZTFAY+Ftan?β=FN/2FR2sin(α+β)/cos?β+FZTsin?α(R1+R2)=FNcos?α(R1+R2)/2(4)
綜合式(1)~式(4),可以得到自適應機構在正常工作時,每組平行四邊形支撐桿系外撐時,對管壁的正壓力為
FN=2FR2sin(α+β)cos?αcos?β(R1+R2)+2FZTtan?α(5)
2?建立優化模型
2.1?優化設計變量
分析式(1)~式(5)可知,在自適應管徑變化過程中,影響平行四邊形支撐桿系外撐力的關鍵結構參數為:支撐桿鉸點B和C之間距離R1,支撐桿鉸點A和B之間距離R2,連桿長度R3,初始支撐角α0及初始連桿傳動角β0。為減少優化設計過程中設計變量的復雜程度,以鉸點A、B、C、D、E、F的坐標為機構設計參數,以鉸點B橫坐標x1與鉸點C橫坐標x2為設計變量,即
X=(x1,x2)T(6)
2.2?目標函數
自適應機構在適應管徑變化過程中需要保證對管壁壓力最大。因此,確定目標函數為
f(X)=max(FN)(7)
2.3?約束條件
自適應機構每組平行四邊形支撐桿系可以看作是一個曲柄滑塊機構。從已設計的彈簧要求出發,對滑塊的移動量ΔR4添加以下約束條件
5.10≤ΔR4≤6.24(8)
從自適應機構的構成條件出發,對鉸點B、C的橫坐標添加以下約束條件
x2≤x1(9)
從支撐桿剛度出發,自適應機構適應管徑變化過程中支撐角α越大越好,但是隨著支撐角α的增大,整個管道機器人的徑向尺寸就會隨之增大,綜合考慮對支撐角α和鉸點B橫坐標添加以下約束
30°≤α≤60°,?17.03≤x1≤51.10(10)
3?Adams優化設計
采用Adams中參數化建模與優化設計模塊,對自適應機構重要的結構優化參數進行靈敏度的相關分析。在初選的優化設計變量中,確定對優化目標影響效果相對較大的結構參數作為結構優化的設計變量,從而優化自適應機構,優化設計流程圖如圖3所示。
3.1?參數化建模
首先建立模型關鍵點并對其進行參數化,然后根據參數化關鍵點建立各零部件,間接實現自適應機構整體參數化。利用ADAMS/View/Design?Variable創建需要的設計變量或常量,設計變量如表1所示,并創建6個機構關鍵點,參數化關鍵點坐標如表2所示。同時,根據創建的參數化關鍵點,連接A和B兩點,建立支撐桿;連接C和D兩點,建立連桿;連接B和E兩點,建立基板;連接E和F兩點,建立輔助桿;于D點建立滑塊。
一個完整機構不僅包括組成系統的各個構件,還包括各個構件之間所存在的相對運動約束。管道機器人自適應機構模型包括支撐桿、連桿、基板、輔助桿、移動滑塊、中心軸等部件,將機架視為地面,通過添加運動副,保證各零部件之間的約束關系。運動副和約束對象如表3所示。
在基板中心施加一個向下速度為10?mm/s的驅動力,模擬自適應機構在適應管徑變化過程中受到管壁對于履帶輪的正向壓力;給滑塊中心施加一個水平向左的變力,用以模擬所設計彈簧的彈力,該彈力函數表達式為F=5.65*(.canshuhuayouhua.MARKER_45_MEA_1)-168.4,建立自適應機構參數化優化設計模型,自適應機構參數化模型如圖4所示。
采用Adams對自適應機構進行優化設計時,添加約束條件的方式與傳統的利用約束方程對設計變量進行約束的方式不同,可直接或間接利用Adams提供的測量工具模塊確定,且約束條件的測量函數表達式需要轉化為小于等于零的標準形式。通過Bulid/Measure建立約束條件所需要的測量,并通過Build/Measure/Function創建約束條件式(8)~式(10)的標準化測量函數表達式,并通過Simulate/Design?constraint利用測量函數對約束條件表達式進行約束。
通過使用Simulate/Design?Objective,在Measure選項中選擇在基板中心添加的驅動力作為目標函數,適應管徑為Ф210?mm~220?mm,仿真過程中的均值作為目標函數在一個優化周期內的取值。
3.2?設計研究
利用Adams中的Design?study模塊,研究自適應機構參數化模型,在允許范圍內變化時,得到各設計變量對自適應機構目標函數的影響特點。自適應機構設計參數靈敏度如表4所示。由表4可知各個設計參數對自適應機構履帶輪與管壁之間正向壓力FN的靈敏度大小。通過對比發現支撐桿與基板鉸點橫坐標x1、支撐桿與連桿鉸點橫坐標x2靈敏度絕對值相差不大,說明這兩個參數對自適應機構履帶輪與管壁之間正向壓力FN影響比較明顯,因此優化設計變量無需進行修正(如式(6)所示)。
機器人自適應機構設計如圖5所示,由圖5可以看出,支撐桿與基板鉸點的橫坐標x1及支撐桿與連桿鉸點的橫坐標x2,對自適應機構在適應管徑變化過程中向管壁施加正向壓力的性能均有較大影響,且后者影響稍大一些。
圖5a是以支撐桿與基板鉸點橫坐標x1為設計變量,以自適應機構適應管徑變化過程中履帶輪對管壁正向壓力FN為目標的設計研究結果。由圖5a可以看出,履帶輪對管壁正向壓力FN隨支撐桿與基板鉸點橫坐標x1呈非線性增大;圖5b是以支撐桿與連桿鉸點橫坐標x2為設計變量,以自適應機構適應管徑變化過程中履帶輪對管壁正向壓力FN為目標的設計研究結果。由圖5b可以看出,履帶輪對管壁正向壓力FN隨支撐桿與連桿鉸點橫坐標x2呈非線性減小。
3.3?優化設計
將支撐桿與基板鉸點橫坐標x1及支撐桿與連桿鉸點橫坐標x2作為優化設計變量,在表1要求的變量范圍內,在式(8)~式(10)的約束條件限制情況下,以自適應機構適應管徑變化過程中履帶輪對管壁正向壓力FN最大為優化目標,采用Adams中的優化設計功能模塊,對自適應機構進行優化設計分析。在自適應機構適應管徑變化過程中,履帶輪對管壁正向壓力FN優化軌跡如圖6所示,自適應機構優化前、后對比結果如表5所示。
4?結束語
本文采用了Adams參數化建模與優化設計方法,實現了對履帶式管道機器人自適應機構的優化設計。仿真結果表明,與傳統的利用編寫復雜程序進行優化設計的方法不同,該研究實現了自適應機構在適應管徑變化的過程中,履帶輪對管壁正向壓力較優化前提高11.3%,具有比較明顯的優化效果,提高了管道機器人在已設計彈簧驅動下自適應機構傳遞力的性能,增強了管道機器人的爬行能力,為本課題后續的履帶式管徑自適應管道機器人的研究奠定了基礎。
參考文獻:
[1]?王殿君,?李潤平,?黃光明.?管道機器人的研究進展[J].?機床與液壓,?2008,?36(4):?185-187.
[2]?曹建樹,?林立,?李楊,?等.?油氣管道機器人技術研發進展[J].?油氣儲運,?2013,?32(1):?1-7.
[3]?劉清友,?李雨佳,?任濤,?等.?主動螺旋驅動式管道機器人[J].?機器人,?2014(6):?711-718.
[4]?張建偉,?齊詠生,?王林.?一種新型可變徑管道機器人的結構設計與控制實現[J].?測控技術,?2014,?33(10):?64-67.
[5]?杜云,?隋博,?孟凡華,?等.?自動避障三輪管道機器人設計[J].?河北科技大學學報,?2014,?35(5):?447-453.
[6]?Schempf?H,?Mutschler?E,?Gavaert?A,?et?al.?Visual?and?nondestructiveevaluation?inspection?of?live?gas?mains?using?the?explorerTMfamily?of?pipe?robots[J].?Journal?of?Field?Robotics,?2010,?27(3):?217-249.
[7]?Choi?H?R,?Ryew?S?M.?Robotic?system?with?active?steeringcapability?for?internal?inspection?of?urban?gas?pipelines[J].?Mechatronics,?2002,?12(5):?713-736.
[8]?Ryew?S?M,?Choi?H?R.?Double?active?universal?joint?(DAUJ):?Robotic?joint?mechanism?for?humanlike?motions[J].?IEEE?Transactions?on?Robotics?and?Automation,?2001,?17(3):?290-300.
[9]?唐德威,?梁濤,?姜生元,?等.?機械自適應管道機器人的機構原理與仿真分析[J].?機器人,?2008,?30(1):?29-33.
[10]?施紹寧,?趙永強,?王旭飛.?新型管道除銹機行走部的設計與仿真分析[J].?機械設計與研究,?2010,?26(2):?21-24.
[11]?張云偉,?顏國正,?丁國清,?等.?煤氣管道機器人管徑適應調整機構分析[J].?上海交通大學學報,?2005,?39(6):?950-954,?959.
[12]?李鵬,?馬書根,?李斌,?等.?具有自適應能力管道機器人的設計與運動分析[J].?機械工程學報,?2009,?45(1):?154-161.
[13]?費振佳,?張繼忠,?張磊,?等.?履帶式管道機器人設計及仿真研究[J].?青島大學學報:?工程技術版,?2016,?31(2):?37-42.
[14]?王琪,?曹飛,?張任,?等.?基于ADAMS的碼垛機器人參數化分析[J].?組合機床與自動化加工技術,?2014(7):?45-48.
[15]?焦方坤,?汪蘇,?李曉輝.?一種相貫線埋弧焊接機器人的結構優化設計[J].?機床與液壓,?2014,?42(21):?36-41.
[16]?朱華炳,?張娟,?宋孝炳.?基于ADAMS的工業機器人運動學分析和仿真[J].?機械設計與制造,?2013(5):?204-206.
[17]?童超,?侯宇,?阮龍歡,?等.?變形六輪腿式機器人越障性能分析與結構優化設計[J].?機械設計與制造,?2016(12):?9-12.
[18]?胡偉,?許勇,?張善平.?基于ADAMS的六足機器人腿機構優化設計與仿真[J].?機械制造,?2014,?52(10):?11-14.
[19]?鄭義,?周淑芳,?鄧傳云.?關節式爬管機器人夾緊機構的優化研究[J].?機電工程,?2015,?32(3):?328-332.
[20]?任立敏,?譚益松,?殷國成.?具有柔性傳動能力的氣壓驅動微型管道機器人[J].?液壓與氣動,?2016(8):?18-23.
Optimization?Design?of?Pipeline?Robot?Adaptive?Mechanism?Based?on?Adams
XUE?Yaoyong,?ZHANG?Jizhong,?WANG?Qingqian,?YU?Xiang,?GONG?Jian
(School?of?Electromechanic?Engineering,?Qingdao?University,?Qingdao?266071,?China)
Abstract:??In?order?to?enhance?the?transmission?capacity?of?selfadaptive?mechanism?of?crawler?pipeline?robot,?this?paper?optimizes?the?adaptive?mechanism?of?pipeline?robot.?According?to?the?principle?of?adaptive?mechanism?for?the?presentation?and?dynamic?analysis?of?institutions,?it?establishes?selfadaptive?optimization?design?mathematical?model.?It?provides?optimization?design?with?Adams?parameterized?modeling?and?optimized?design?module?as?a?tool?to?optimize?the?goals?of?the?larger?institutional?parameters?for?the?optimization?variables,?and?with?the?structure?and?movement?requirements?of?the?organization?as?a?constraint?condition,?and?with?adaptive?agencies?in?the?process?of?adapting?to?the?pipe?diameter?to?optimize?the?pressure?on?the?pipe?wall.?The?optimization?results?show?that?the?optimized?adaptive?mechanism?improves?the?pressure?of?the?pipe?wall?by?11.3%,?which?obviously?improves?the?transmission?ability?of?the?adaptive?mechanism?and?enhances?the?crawling?ability?of?the?pipe?robot.?The?research?lays?the?foundation?for?the?followup?development?of?crawler?pipe?diameter?adaptive?pipeline?robot.
Key?words:??pipeline?robot;?ADAMS;?adaptive?mechanism;?optimization?design
猜你喜歡
航空兵器(2016年4期)2016-11-28 21:47:29
科技資訊(2016年19期)2016-11-15 08:34:13
電腦知識與技術(2016年24期)2016-11-14 00:09:15
文理導航(2016年30期)2016-11-12 14:56:57
文藝生活·中旬刊(2016年10期)2016-11-04 06:29:49
中國科技博覽(2016年22期)2016-11-01 14:23:46
中國科技博覽(2016年22期)2016-11-01 13:48:02
中國科技博覽(2016年19期)2016-10-19 12:24:15
中國科技博覽(2016年18期)2016-10-19 08:57:06
科技視界(2016年22期)2016-10-18 15:25:08