面向站立姿態(tài)的操縱舒適性評價模型研究
2020-02-24 09:11:58余隋懷寸文哲
哈爾濱工業(yè)大學學報 2020年5期
趙 川,余隋懷,陳 晨,寸文哲,王 龍
(陜西省工業(yè)設計工程實驗室(西北工業(yè)大學),西安 710021)
站立姿態(tài)下手部的操縱舒適性是人機工效主要的評價內容之一.良好的操縱舒適性不僅減少操作人員疲勞,提高動作協(xié)調性和靈活性,而且影響生產效率和產品質量[1].目前,國內外針對操縱舒適性進行了大量研究,發(fā)現(xiàn)操縱人員的年齡、性別、操縱位置及操縱力等因素是影響上肢疲勞及肌肉負荷的重要因素[2-4],而且采用固定站立操作姿勢的工作人員肌肉骨骼損傷檢出率高于采用坐姿操作的人員[5].
理想情況下設計師應該了解用戶不同操縱位置相對應的舒適性,提高產品的設計質量.對于舒適性評價主要有兩類方式:主觀和客觀評價[6].主觀評價主要是獲取被試者的心理感受,結果受被試者影響較大[7].客觀評價是指借助相關標準、設備和評價方法對心理或生理參數(shù)進行測量[6].
雖然NASA[8]和Society of Automotive Engineers(SAE)[9]提供的標準非常全面,但是規(guī)定的可達域和舒適操作范圍比較寬泛,在工程應用中有一定局限性[10].表面肌電圖技術(sEMG)和腦電圖(EEG)等能夠精確獲取被試者的數(shù)據(jù),但通常受場景和經費限制[11-12].隨著數(shù)字人體模型(Digital human models,DHMs)越來越多地應用于工程領域,良好的舒適性預測模型也是該類工具的主要期望功能之一.因此,將主觀舒適度問題量化之后再進行數(shù)學建模,形成一套客觀有效的舒適度評價方法具有重要意義.
文獻[13]通過上肢關節(jié)力矩的動態(tài)變化值和上肢主要肌力變化量來分析舒適性,但是只考慮了三個關節(jié)角度,而且沒有驗證模型的精確性.Kolich M等[14]利用壓力特征量和人體測量學量建立了舒適度評價的多元線性回歸模型和神經網絡預測模型.Kee[15]基于主觀舒適性提出了3D iso-comfort舒適性曲面,通過關節(jié)角度建立回歸模型分析主觀舒適性,可以對桌面控制裝置進行評價,但是只考慮了三個關節(jié)角度(肩部、肘部、手部),因此不能對多自由度的姿勢進行分析.基于數(shù)據(jù)驅動的評價方法被大量提出.沈陽[16]等采用線性回歸方法,建立了微商車在四種路況(如:瀝青、水泥、砂石和顛簸)下的不舒適度預測模型.文獻[17]通過實驗,收集被試者操縱姿勢、目標位置、人體尺寸和主觀舒適性數(shù)據(jù),并利用實驗數(shù)據(jù)建立舒適性預測模型.類似方法也被應用于汽車內飾評價和坐姿操縱舒適性評價[18-19].
由于人體姿勢、運動控制以及主觀評價的高變異性,通過實驗方法研究操縱舒適性預測模型是非常有效的方法,但是目前對于站立姿勢下的舒適性評價研究較少.T-S模糊神經網絡(Takagi-Sugeno Fuzzy Neural Network,T-S FNN)作為一種將模糊邏輯與神經網絡有機結合的系統(tǒng),具有較強的容錯能力和自適應學習性能,被廣泛應用于處理各種不確定性和模糊性問題[20],恰好符合主觀舒適性預測問題不確定性、模糊性的需求.鑒于此,本文針對站立姿態(tài)下,基于T-S模糊神經網絡建立手部操縱舒適性評價模型,該模型輸入參數(shù)為操縱目標位置、關節(jié)角度、人體尺寸及腳部壓力數(shù)據(jù),輸出參數(shù)為舒適性得分.
1 站立操縱作業(yè)研究對象
用戶在站立姿態(tài)下操縱產品過程中涉及用戶本身、產品和操縱環(huán)境,三者共同構成典型人機系統(tǒng).在作業(yè)過程中,人的感知包含了對自身感知(即本體感覺)、觸覺、視覺、聽覺以及其他方面的知覺,多種知覺共同形成綜合感知特征決定著舒適性.
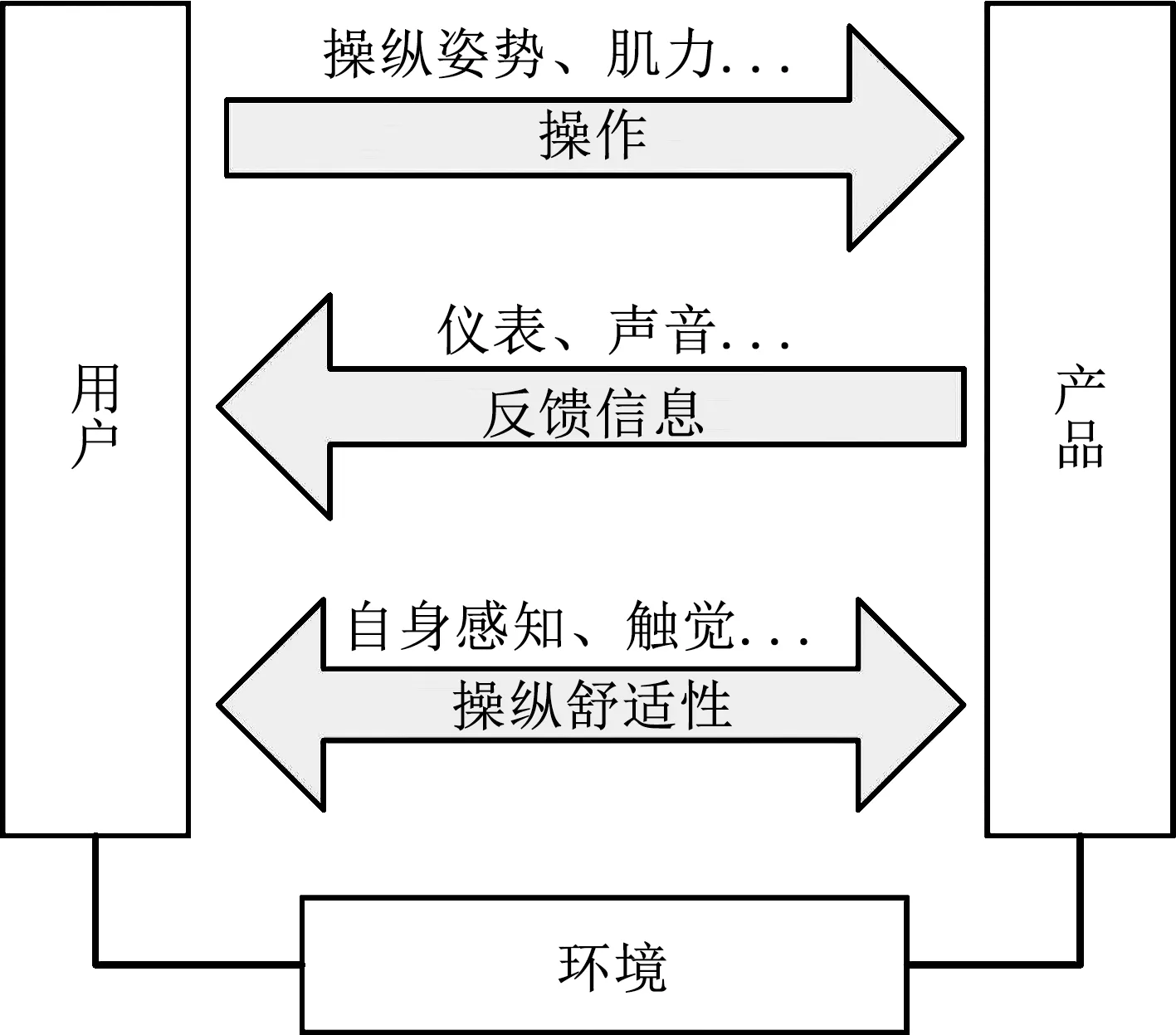
圖1 人機關系示意
人要改變機器的運行狀態(tài),需要通過手或腳施加力于產品的操縱裝置,對于操縱作業(yè)而言,其主要形式是操縱力,而操縱姿勢直接關系到操縱力[21].機器對于用戶具有反饋作用,主要通過儀表顯示變化以及警報裝置的聲音提示等方式,引起人相應的感知,使用戶能夠了解產品的實時運行狀態(tài),以便完成作業(yè)任務.此外,人和產品都處在一定作業(yè)環(huán)境中,作業(yè)空間、照度、溫濕度、振動條件以及特殊氣體等因素都會對人的感受與產品的運行產生影響,如圖1所示.在操縱過程中,由于操縱目的和產品運行狀態(tài)在不斷變化,故上述過程形成持續(xù)運行的閉環(huán)反饋模型.本研究主要對模型中產品位置及操縱姿勢變化引起的感知變化進行預測.
2 操縱舒適性實驗
根據(jù)上述分析,建立操縱舒適性分析評價模型首先需要獲取與舒適性相關的用戶、產品及操縱環(huán)境等數(shù)據(jù).20名右手利者參與了本次實驗,其中女性11名、男性9名.根據(jù)《中國成年人體尺寸GT 10000-88》,男性身高所占百分位數(shù)為50%~95%,女性身高所占百分位數(shù)為40%~99%,身體測量數(shù)據(jù)見表1.
為了分析不同操縱位置對用戶舒適性的影響,25個圓形貼紙用來代表不同的操控位置.圓形貼紙的直徑為3 cm,5行、5列均勻排列于塑料板上,每個圓形貼紙之間的間距均為20 cm.被試者要求自然站立,向前伸出右臂,上臂與軀干為90°,肘關節(jié)與肩部保持水平.調整塑標板位置使中指指尖觸碰到第3行、第3列圓形貼紙的中心,此位置為被試者最大操縱范圍為B3.在此基礎上,增加塑料板水平距離10 cm為B4;減少水平距離15 cm為B2;減少水平距離30 cm為B1,如圖2所示.目標中心位置根據(jù)每個被試者肩高和肩部到中指指尖的長度來決定.

表1 被試者人體測量數(shù)據(jù)
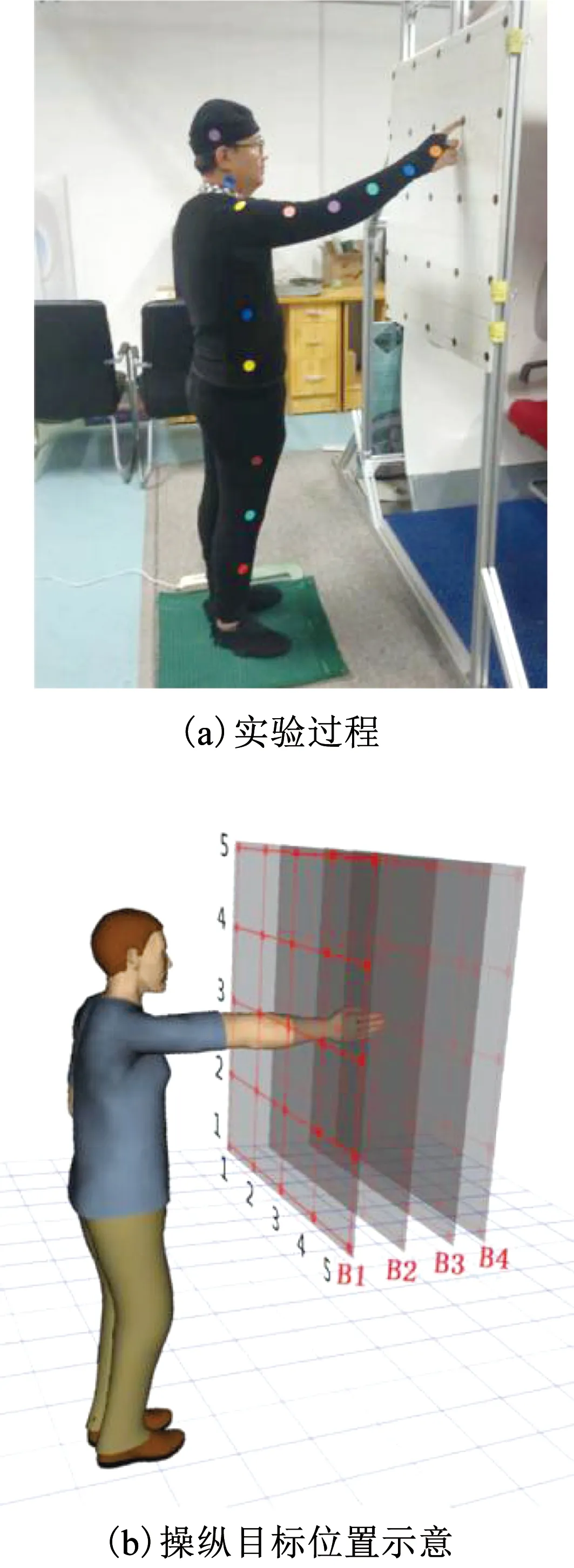
圖2 操縱舒適性實驗
實驗開始后,被試者根據(jù)實驗員的指示,用食指點擊圓形貼紙中心,并保持5 s.點擊過程中被試者可以自由彎腰、調整肩部和肘部來完成操作.但是不能調整站立位置和目標位置.塑料板和圓形貼紙的點擊順序都是隨機決定,首先隨機決定塑料板位置,然后隨機決定要點擊圓形貼紙的位置.一個點擊任務完成后被試者需要休息1~2分鐘,然后進行下次點擊實驗.被試者一共需要完成100次操縱任務(5行×5列×4個塑料板位置).
每次點擊實驗結束后,被試者要求完成CP-50(10)主觀不舒適性問卷調查[22].問卷從0分~5分,分成6個類別,分別表示極端不舒適、非常不舒適、不舒適、中等、舒適和非常舒適.每個類別又細分成10個得分,得分低于10表示極端不舒適.實驗開始前被試者需要熟悉該問卷.
實驗過程中將不同顏色的貼片放置于被試者右側的主要關節(jié)部位(頸部、肩部、上臂、下臂、手腕、腰部和腿部).利用1臺SONY攝像機(HDR-CX510)進行拍攝,將攝像機放置在被試者右側,觀測角度與矢狀面垂直,拍攝被試者整個身體的運動姿勢.將視頻數(shù)據(jù)導入Tracker (4.11.0,Open Source Physics)獲取關節(jié)角度運動軌跡[23],根據(jù)夾角計算公式獲取關節(jié)角度,如圖3所示.
采用壓力座墊(Body Pressure Measurement System,Tekscan),不間斷地記錄腳部體壓分布.壓力座墊包含1 024(32×32)個傳感器,厚度為1.78 mm,測力范圍從0 mmHg到250 mmHg(5PSI).壓力座墊檢測面積為471 mm×471 mm.在實際測量過程中,體壓分布的平均壓力(Mean pressure)和峰值壓力(Maximum pressure)可以用來解釋76.2%的體壓分布數(shù)據(jù)變化,平均壓力梯度(Mean gradient)和峰值壓力梯度(Maximum gradient),與被試者主觀舒適性具有顯著相關性[24-26].因此,本研究選擇平均壓力、峰值壓力、平均壓力梯度和峰值壓力梯度4個體壓分布參數(shù)對主觀舒適性進行預測.
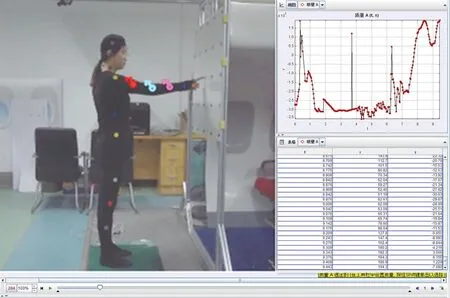
圖3 關節(jié)角度計算
3 數(shù)據(jù)處理及操縱舒適性模型建立
實驗結束后可以得到預測模型相應輸入數(shù)據(jù)和輸出數(shù)據(jù).輸入數(shù)據(jù)包括被試者身體測量數(shù)據(jù)、關節(jié)角度和操縱目標位置、壓力座墊數(shù)據(jù),輸出為主觀舒適性得分.
然而在實驗過程中,由于問卷的主觀不確定性,不同被試者對主觀舒適性的判斷也不同,所以在相同操縱位置舒適性得分也會有較大差異.而T-S FNN網絡結構和參數(shù)需要根據(jù)樣本的差異而自行調整,需要有較好的自適應能力.針對上述問題考慮到預測模型的結構辨識復雜、模糊規(guī)則選取較困難等弊端,本研究將箱式圖(box-plot)引入到數(shù)據(jù)樣本預處理中[27].針對不同被試者和操縱位置的舒適性得分差異,確定相應參數(shù)初始值,對樣本數(shù)據(jù)進行篩選.有利于提高T-S FNN的效率和精確性,并增強網絡的自適應性.
如圖4所示.異常值(outlier)為偏離總體數(shù)據(jù)的數(shù)值,會對模型產生不可靠影響.IQR為上、下4分位之差,主要用以測量數(shù)據(jù)的離散程度,其中包含了50%的數(shù)據(jù).上、下4分位(upper/lower quartile,Q3/Q1),為第75%位數(shù)和25%位數(shù).內上限(upper fence)為Q3+1.5*IQR,內下限(lower fence)為Q1-1.5*IQR.內上限和內下限以外的值為異常值.利用SPSS對主觀舒適性數(shù)據(jù)進行異常值處理,結果表明共有異常值22個,剩余1 978個數(shù)據(jù)將用來訓練舒適度評價模型.
該模型使用T-S FNN模糊推理系統(tǒng),具備兩組可訓練參數(shù).依據(jù)實驗數(shù)據(jù),可確定T-S FNN各層節(jié)點數(shù)和隸屬度函數(shù)的參數(shù)初始值,如圖5所示.有4類共21個輸入,其中身體數(shù)據(jù)包括:性別、身高、體重、立姿舉高、側面手臂長、肩部指尖長、坐高和坐姿下肢長.關節(jié)角度包括:頸部、軀干、上臂、下臂、手腕和膝蓋的角度.壓力座墊數(shù)據(jù)包括:平均壓力、峰值壓力、平均壓力梯度和峰值壓力梯度.操縱目標位置:塑料板位置和圓形貼紙坐標X軸、Y軸坐標.每個輸入有2個隸屬度函數(shù).該模型利用了典型T-SFNN結構,輸出端每個端點都具有識別函數(shù),根據(jù)訓練數(shù)據(jù)設定閾值.給定訓練網絡的輸入輸出樣本對后,建立T-S FNN模糊推理系統(tǒng)過程如下:
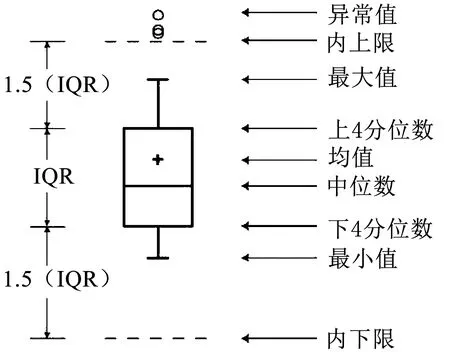
圖4 箱型
第1層:第1層節(jié)點的數(shù)量(N)為每個輸入自變量的數(shù)量(m=21)及相應隸屬度函數(shù)(n=2).輸出節(jié)點被定義為
Oij=μi,j(Xi),fori=1,m,j=1,n.
(1)
式中:μij為第jth個隸屬度函數(shù),采用高斯函數(shù)作為隸屬度函數(shù),Xi定義為
(2)
式中:a,b,c,為高斯函數(shù)的預定參數(shù).
第2層:該層輸出代表每個規(guī)則的強度.由輸入層決定
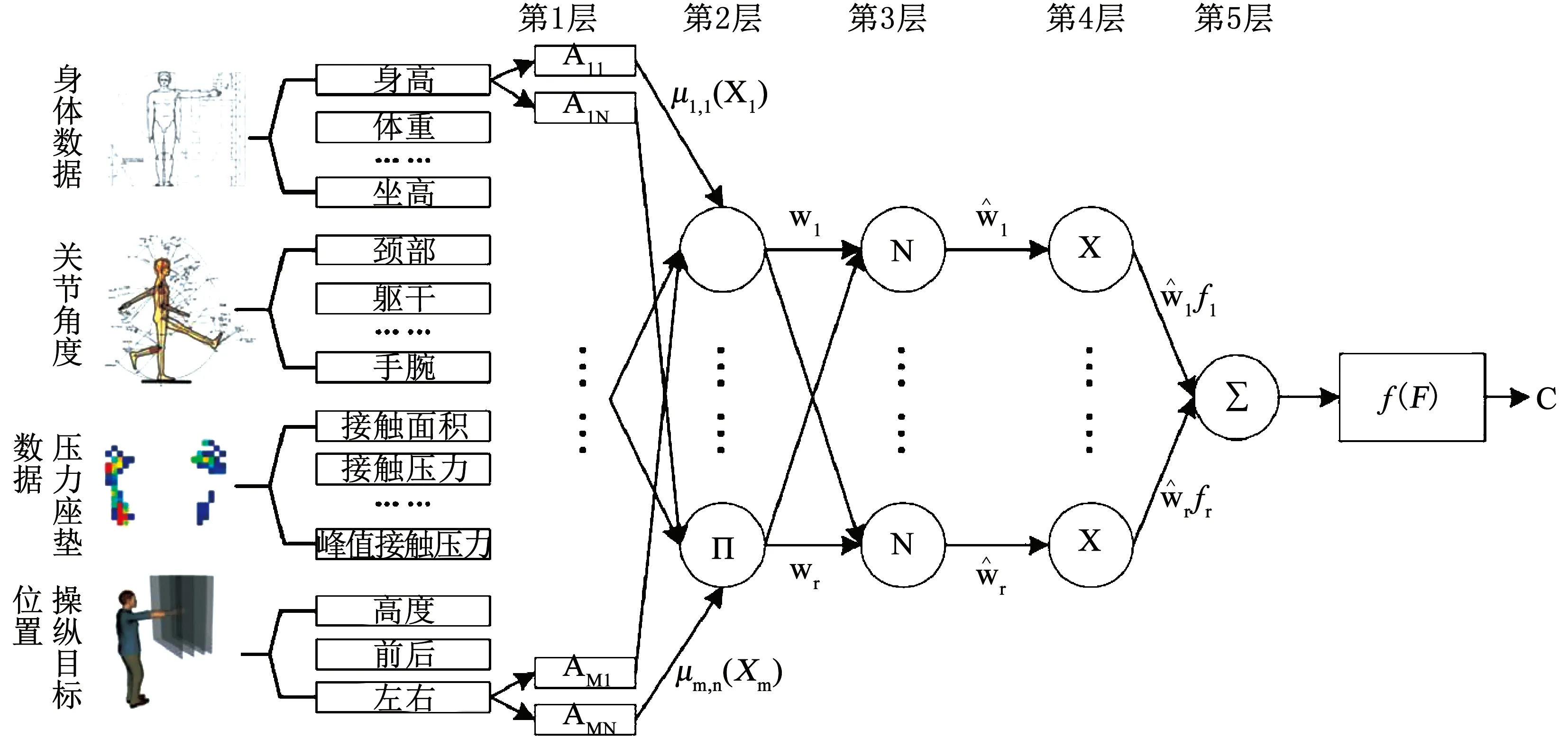
圖5 操縱舒適性預測T-S FNN模型
Ok=Wk=μ1,i(X1)μ2,i(X21)…μm,i(Xm).
(3)
第3層:該層將輸入節(jié)點k的權重進行無量綱處理
(4)
第4層該層輸出為if-then規(guī)則的加權值:
(5)
式中:fk為第Kth個模糊規(guī)則
(6)
式中:Pij和Rk為后件參數(shù),i=1;mj=1;nk=1;r.
第5層:該單節(jié)點層根據(jù)前4層的權重計算ANFIS最終結果(F)
(7)
最終,判別函數(shù)f(F)根據(jù)F的數(shù)值輸出主觀舒適性得分c.
90%(1780條)的實驗數(shù)據(jù)用來對模型進行訓練,10%(198條)的實驗數(shù)據(jù)用來驗證模型.T-S FNN的實現(xiàn)及計算過程通過Matlab(2016a)實現(xiàn),如圖6所示為操縱目標X軸和Y軸坐標位置對主觀舒適度影響.在模型訓練過程中使用反向傳播算法與最小二乘法的混合方法,使該模型的前件參數(shù)和后件參數(shù)在訓練過程中都經過了優(yōu)化.
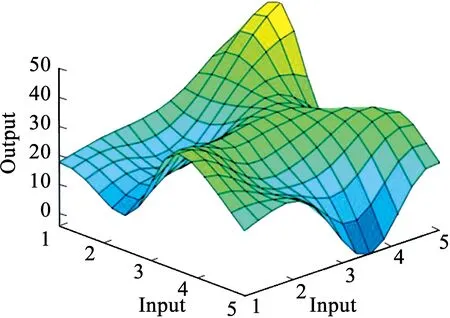
圖6 目標位置對舒適性得分影響
最后通過對比該模型的預測舒適性值和實際舒適性得分均方根誤差(REMS)驗證該模型的有效性.RMSE用來表示實際值Cact和預測值Cest差別
(8)
式中:s為被試者數(shù)據(jù)索引,m=1,2,…,198,N為樣本數(shù)量,N=198.
4 實例分析及性能驗證
針對剩余10%(198條)實驗數(shù)據(jù),利用建立的T-S FNN預測模型獲取被試者的操縱舒適性參數(shù).如圖7所示.為了說明T-S FNN預測模型的精確性,將該方法與BP神經網絡的求解方法進行比較.通過Matlab,在相同運行環(huán)境、軟件平臺及實驗數(shù)據(jù)下,設定BP神經網絡的最大迭代次數(shù)Epochs=10 000,網絡訓練誤差 ET=10-7.對操縱舒適性數(shù)據(jù)進行預測,如圖7所示.由式(8)計算兩種方法的預測值和實際值的差別,結果顯示T-S FNN預測結果的均方根誤差為1.53,BP神經網絡預測結果的均方差為4.99,因此T-S FNN預測模型能夠更好地反應被試者的真實情況.
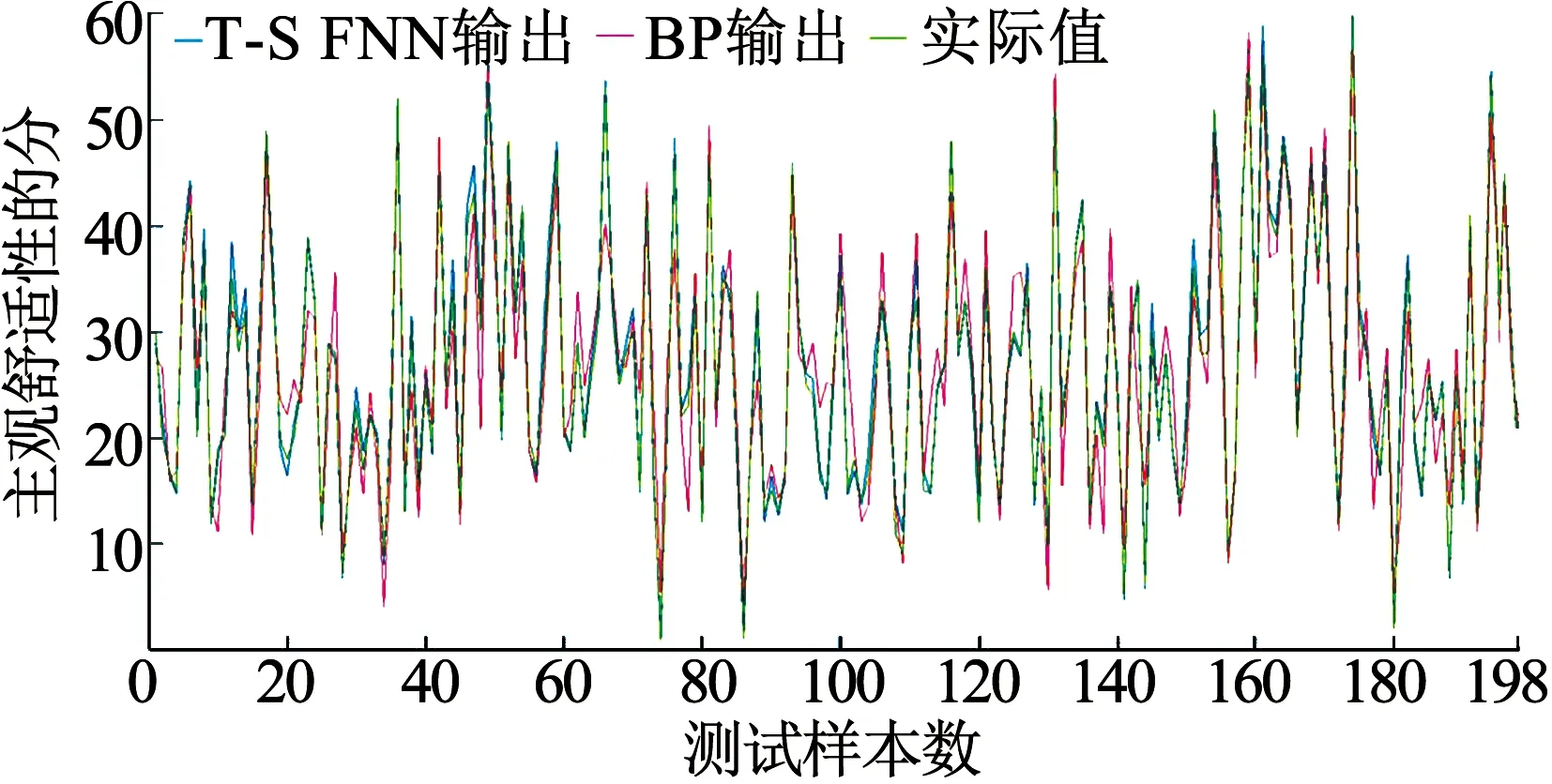
圖7 模型預測得分
為進一步分析T-S FNN預測模型的有效性,隨機選取了15組不同操縱任務,利用西門子人機工程仿真軟件JACK[28,29]將被試者的關節(jié)角度作為輸入計算相應的RULA[30]和OWAS[31]的評估結果.并采用Spearman等級相關,驗證相關性,見表2.結果表明T-S FN的預測值與實際值相關性系數(shù)r=0.962,與RULA得分相關性系數(shù)r=0.833,與OWAS得分相關性系數(shù)r=0.694,通過查詢《Spearman秩相關系數(shù)臨界值表》[32],當樣本數(shù)n=15,相關性系數(shù)r>0.654時,我們有99%的置信度認為兩個隨機變量相關.所以在P=0.01的置信水平上來看,T-S FN的預測值不僅和實際值是等級相關,而且與RULA和OWAS的評估結果顯著相關.

表2 Spearman 相關性分析
5 結論
本文在數(shù)據(jù)驅動的方法基礎上提出一種基于T-S FNN的站立姿態(tài)操縱舒適性預測模型.通過站立操縱實驗收集主觀舒適性得分、目標位置、關節(jié)角度、人體尺寸及腳部壓力數(shù)據(jù).針對主觀舒適性得分差異,通過箱式圖對樣本數(shù)據(jù)進行篩選,提高了T-S FNN的預測效率和精確性,最后構建了針對站立姿態(tài)的T-S FNN舒適性預測模型,從而實現(xiàn)對站立姿態(tài)下不同操縱位置的主觀舒適性預測.與BP神經網絡預測模型進行比較,也可看出T-S FNN模型可以對樣本精確學習,具有較強泛化能力,并且預測精度高.最后隨機選取15組不同操縱任務,采用Spearman等級相關,驗證了T-S FN的預測值不僅和實際值有顯著相關性,而且與RULA和OWAS的評價結果顯著相關.以該方法為基礎,可以進一步構建各影響因素與操縱舒適性指數(shù)的映射模型,并將其導入數(shù)字人體模型中,對站立姿態(tài)下的操縱舒適性進行預測,可有效地減少工作中上肢疲勞及肌肉負荷問題.但是,由于被試樣本量較少、年齡眾分布較集中等因素,使得大量歷史數(shù)據(jù)信息需要不定時維護與更新,以不斷提高預測結果對實際操縱舒適性動態(tài)變化的適應性,下一步將結合手臂和肩部的肌電數(shù)據(jù)展開更深入研究.
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
石油瀝青(2021年4期)2021-10-14 08:50:44
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
建筑熱能通風空調(2018年5期)2018-07-09 03:16:38
池州學院學報(2017年3期)2017-10-16 01:38:35
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
消費者報道(2016年3期)2016-02-28 19:07:32
中國教育技術裝備(2015年19期)2015-03-01 02:43:07
汽車零部件(2014年6期)2014-09-20 06:24:48
