航姿參考系統的改進桿臂效應補償方法
2020-02-24 09:32:18譚強俊程永生劉顯學李寅鑫
哈爾濱工業大學學報 2020年5期
譚強俊,程永生,唐 彬,劉顯學,周 浩,李寅鑫
(中國工程物理研究院 電子工程研究所,四川 綿陽 621000)
由于加速度計的安裝位置很難與載體搖擺參考點相重合,在角運動環境下加速度計輸出會產生相對參考點的干擾加速度,即桿臂效應[1-2].航姿參考系統(Attitude and Heading Reference System,AHRS)中加速度計測量重力加速度在載體系各坐標軸上的投影分量從而獲取水平姿態角,同時修正陀螺漂移[3-5].在靜態條件下可獲得較高的姿態測量精度.但在動態環境,疊加在加速度計敏感軸上的干擾加速度會對加速度計測姿精度造成極大影響.
本文基于AHRS系統,通過對桿臂效應的誤差機理以及現有濾波、補償方法的不足進行分析,提出了一種改進的桿臂效應補償方法,與現有方法相對比,顯著提高了桿臂效應誤差補償精度.
1 桿臂效應的誤差機理
定義慣性坐標系(i系)為oixiyizi,載體坐標系(b系)為obxbybzb,加速度計安裝在載體P處,ob點為載體的參考點,R為P點在慣性系中的位置矢量,R1為載體參考點ob在慣性系中的位置矢量,r為從載體參考點到P點的位置矢量,即為桿臂.位置示意圖如圖1所示.
在角運動環境下,由于載體參考點ob與加速度計安裝點P不重合,在加速度計的輸出中就含有相對參考點的桿臂效應誤差,如式(1)所示
(1)

桿臂效應引起的干擾加速度表示為
(2)
其中第1項定義為桿臂效應的向心加速度項,第2項定義為桿臂效應的切向加速度項.
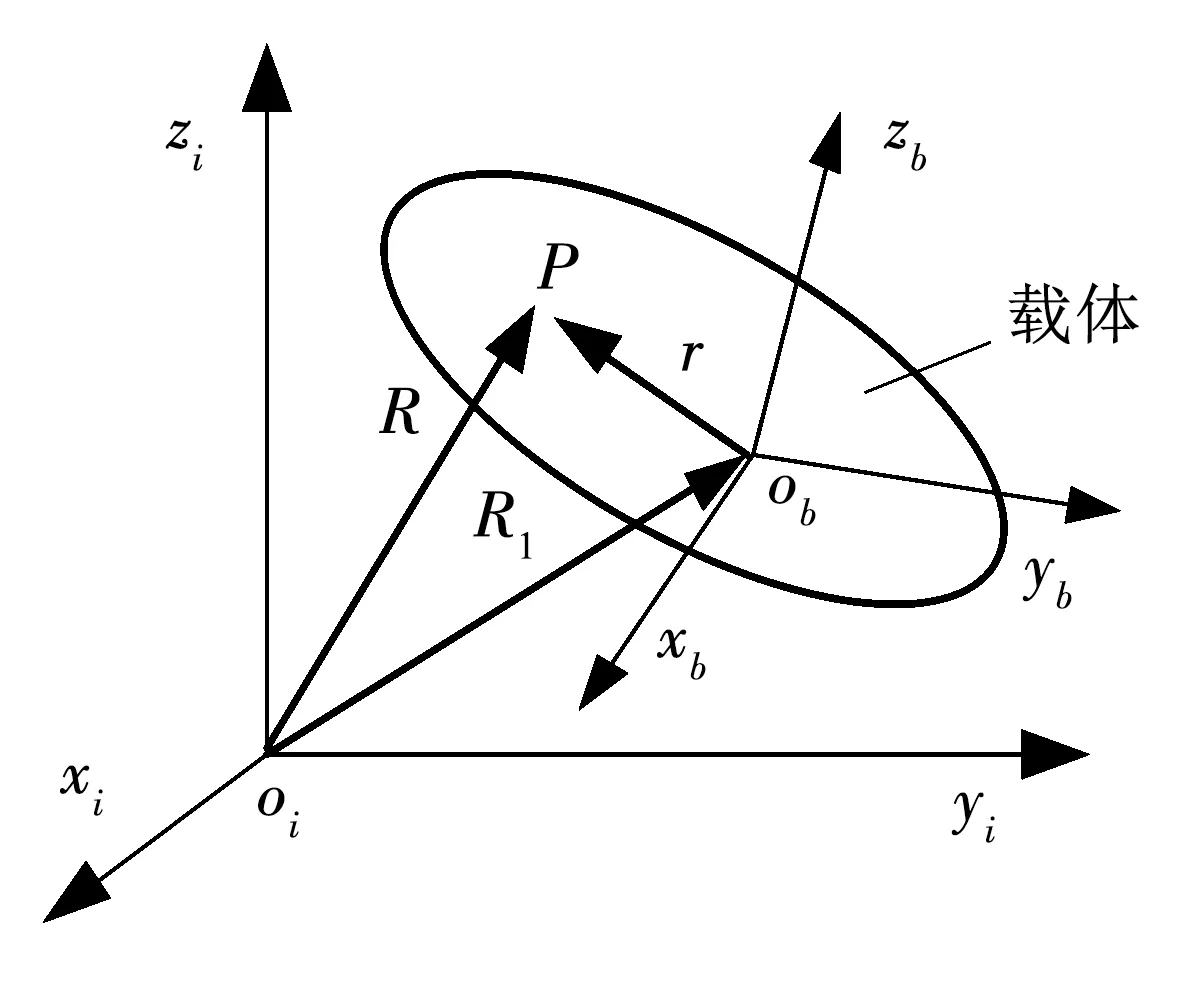
圖1 坐標系間矢量關系
桿臂效應對加速度計測姿的影響航姿參考系統中加速度計通過測量重力加速度在載體系各坐標軸上的投影分量來獲取水平姿態角,以y軸為例
(3)


由式(2)、(3)可以得到,桿臂效應造成的橫滾角誤差Δγ為
(4)
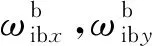
在橫滾角γ=0°時,由Δf1,Δf2分別造成的橫滾角誤差Δγ1,Δγ2如圖2所示.
圖2中,Δγ1為向心加速度造成的姿態誤差;Δγ2為切向加速度造成的姿態誤差.由圖2可見隨著角速度、角加速度以及桿臂長度的增加,桿臂效應相應增大,加速度計測姿誤差也越大,只有通過對加速度計桿臂效應進行有效的補償,才能保證AHRS系統測姿精度.
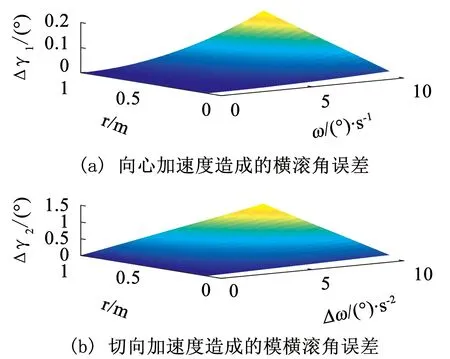
圖2 桿臂效應造成的測姿誤差
2 現有桿臂效應補償方法的不足
目前處理桿臂效應的解析方法主要為低通濾波法和力學補償法.在實際工程中二者應用廣泛,但也存在其自身的不足.
2.1 低通濾波法的不足
從現有文獻看,采用低通濾波法主要應用在初始對準場景中.此時載體一般沒有大的角機動,只有微幅晃動(振動).該環境下的干擾頻率遠高于舒拉頻率以及地球自轉頻率,可視為高頻干擾[6].但是低通濾波無法濾除振動產生的直流分量.
設在振動環境下,載體沿俯仰軸、橫滾軸有頻率相同,相位差為90°的角振動,即
(5)
式中:Ω為振動的角頻率,θ為俯仰角,θm為俯仰角的振動幅值,γ為橫滾角,γm為橫滾角的振動幅值,ψ為方位角.
由歐拉角微分方程,振動環境下的角速度為
(6)
在微幅振動環境下,可以把θ,γ當作小角度處理,即
(7)
(8)
由式(8)可見,振動環境下向心加速度項存在直流分量,依靠低通濾波無法將直流分量濾除.
對式(6)求角加速度,可得
在振動環境下角加速度仍為振蕩形式,通過低通濾波可濾除切向加速度.但在機動環境下,若角加速度也包含有直流項時,低通濾波無法濾除角加速度直流項.
2.2 力學補償法的不足
(9)

(10)

var(a)=2Qω/ΔT2.
(11)
3 一種改進的桿臂效應補償方法
利用低通濾波法,桿臂效應中的向心加速度項會殘存整流誤差項;再者當角加速度也含有直流分量時,桿臂效應中的切向加速度項也會出現低通濾波無法濾除的整流誤差.采用力學補償法,向心加速度項的求解誤差會受到陀螺測量誤差的影響;而通過角速度微分獲取角加速度,會引起切向加速度項誤差激劇放大.考慮到多加速度計可以直接解析地求解角加速度[17-18],可避免角速度微分計算造成的誤差放大.因此綜合考慮低通濾波法、力學補償法以及多加速度計解析求解法,提出一種改進的桿臂效應補償方法見圖3.對于桿臂效應中的向心加速度,在低于給定角頻率閾值工況下采用低通濾波法,在高于給定角頻率閾值工況下采用力學補償+低通濾波法.對桿臂效應中的切向加速度項,通過多加速度計解析求解角加速度.

圖3 改進的桿臂效應補償方法
3.1 基于角頻率閾值判決的向心加速度項補償
(12)
則根據式(12),經過小波去噪后,可認為
(13)
(14)
將式(7)代入式(14),即
(15)
(16)
將式(7)代入式(16),即
(17)
(18)
將式(7)代入式(18),即
(19)

設角頻率閾值Ω0為
Ω0=8|b|/(3γmθm),
(20)
當Ω≥Ω0時,有
(21)
而在Ω<Ω0時,有
(22)
由式(21)、(22)可見,當角頻率Ω大于角頻率閾值Ω0時,采用力學補償+低通濾波法造成的殘存整流誤差小于直接采用低通濾波造成的整流誤差;而在角頻率Ω小于角頻率閾值Ω0時,直接采用低通濾波造成的整流誤差小于采用力學補償+低通濾波法造成的殘存整流誤差.
3.2 利用多加速度計補償桿臂效應切向加速度項
因微分法求解角加速度會放大誤差,而低通濾波無法濾除直流分量,因此提出兩種利用多加速度計解析求解角加速度的改進方法.
3.2.1 6加速度計構型1
設置6加速度計構型,如圖4所示.6個加速度計安裝在立方體6個面的中心,其敏感軸沿著每個面的對角線.令θb表示加速度計在載體系中敏感方向矢量,在6加速度計構型其中心位于P點,立方體的邊長為2l時,由式(1)可得單個加速度計的輸出表達式為
(23)

圖4 六加速度計構型1
該構型方案的安裝參數矩陣
將安裝參數矩陣代入式(23),可得角加速度
(24)

(25)
3.2.2 6加速度計構型2
構型1中加速度計的布局相對6個基準面為傾斜安裝.文獻[20]指出斜置IMU,存在大安裝誤差角,安裝誤差角二次項的影響不能忽略.文獻[21]指出斜裝形式下的標定需要:1)設計傾斜的標定工裝;2)設計專門的斜裝標定算法.由此可見構型1中加速度計的布局對實際安裝以及標定都帶來一定的困難.文獻[22]指出正交雙加速度計可消除安裝誤差角影響.文獻[23]中給出了一種便于安裝的6加速度計構型,但該方案將多個加速度計安裝在同一點,若采用體積較大的石英撓性加速度計,會產生較大的安裝誤差.為此設計了另一種構型:6加速度計構型2,如圖5所示.將各加速度計的安裝位置移至各基準面的中心,避免了將多個加速度計安裝在同一點造成的安裝誤差.各加速度計距離質心的距離均為l.同時構型2不存在大安裝誤差角問題.
圖5 6加速度計構型2
該構型方案的安裝參數矩陣
代入式(23),可得角加速度為
(26)

(27)
相比構型1,構型2在振動環境下會有整流殘差,且隨著角頻率、振幅的增加,其殘留整流誤差也隨之增大.對比式(24)及式(26),在角加速度項含有直流分量的情況下,構型1能很好地補償切向加速度,而構型2求解角加速度的誤差項中含有角速度信息,也即是構型2求解角加速度的誤差會隨著角速度的增大而增大.
4 仿真驗證
4.1 桿臂效應向心加速度項補償

由圖6可見,對于向心加速度的補償,在角頻率大于角頻率閾值時,改進算法的殘存整流誤差小于低通濾波法殘存整流誤差.隨著振幅增大,角頻率閾值迅速減小,也即是在大振幅工況下,改進算法遠勝于低通濾波法.
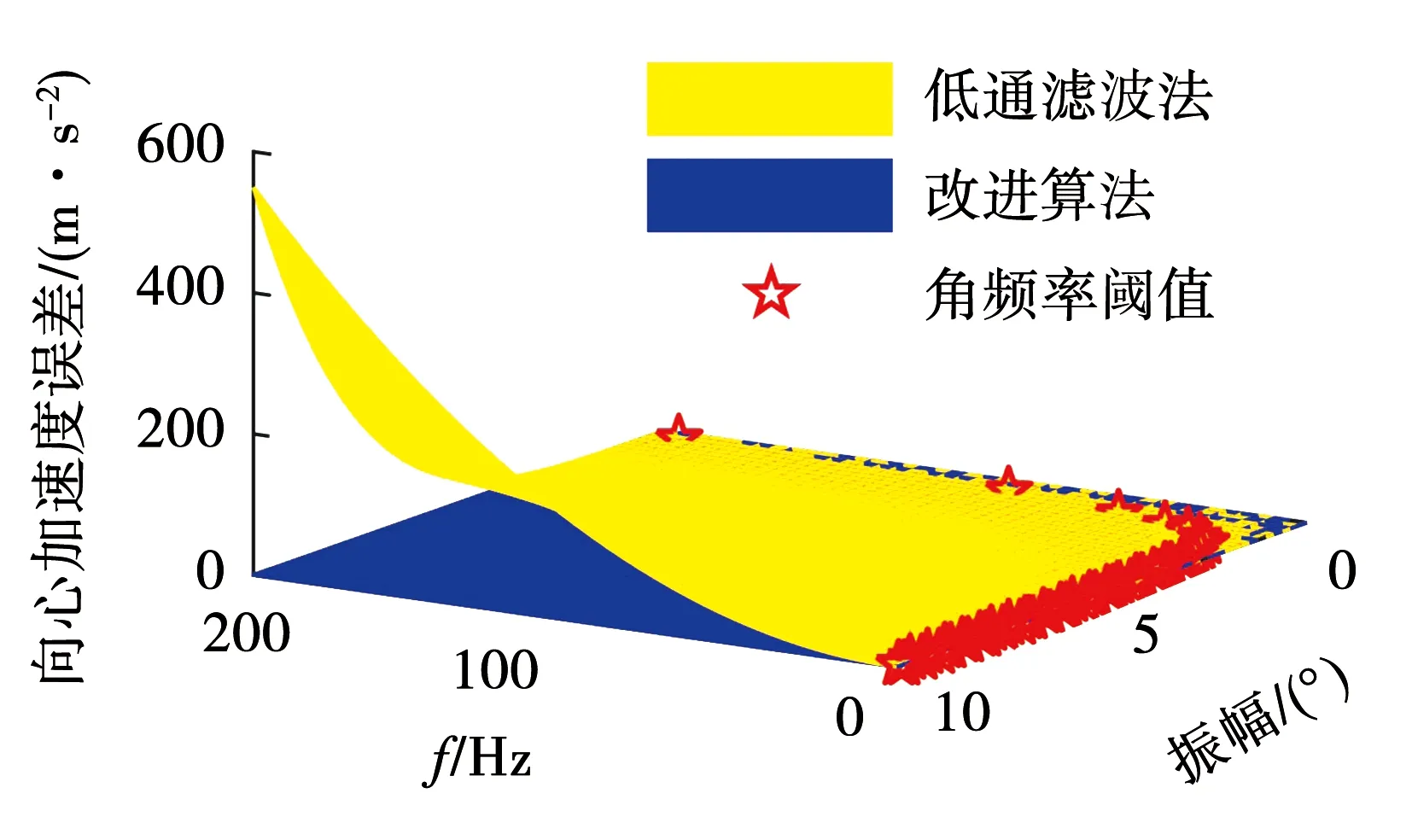
圖6 改進算法與低通濾波算法的比較
Fig.6 Comparison between improved algorithm and low-pass filtering algorithm
4.2 桿臂效應切向加速度項補償
在實際工程上應用的MEMS加速度計其精度已達到1×10-4g[19].因此在仿真中設定加速度計常值漂移服從Gauss分布,均方差為10-4g.
4.2.1 非振動低動態環境
4.2.2 非振動高動態環境

從圖7可見,構型1解析求解的切向加速度比直接微分法的精度提高了1個數量級.構型2的求解誤差隨著角速度的增大而增大,但在低動態環境下構型2的求解誤差是可以接受的.在仿真650 s時,構型2的求解誤差達到-0.042(m/s2),與直接微分法的求解誤差相仿,而此時角速度達到325(°/s).也即是除了高動態環境下,一般的工程應用也可采用構型2.
4.2.3 振動環境
設定振動頻率范圍為0~20 Hz,俯仰角的振幅θm與橫滾角的振幅γm設為10°,仿真時間為40 s,兩種加速度計構型在振動環境下的求解桿臂效應的切向加速度項誤差如圖9所示(以x軸角加速度為例)
從圖9可看到,振動頻率對構型1影響較小,而構型2的切向加速度誤差隨著振動頻率增加而增大.
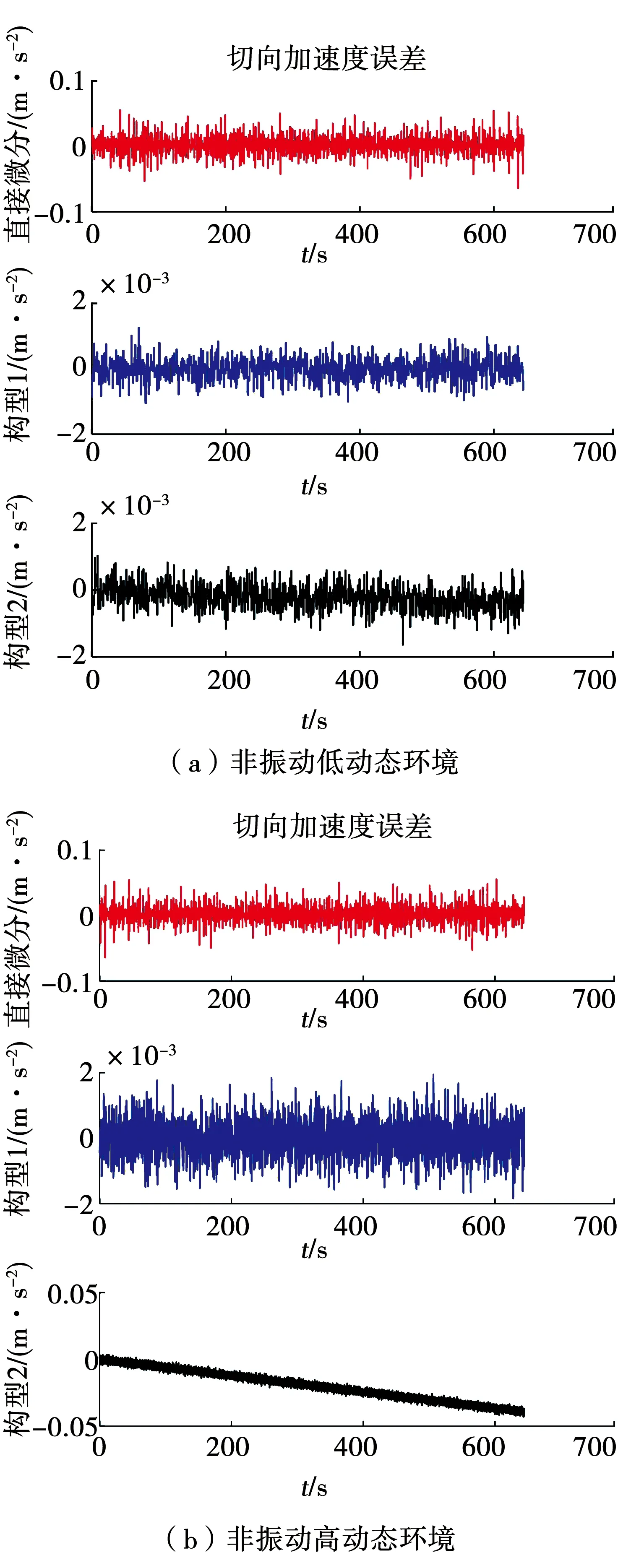
圖7 非振動環境下切向加速度誤差對比
Fig.7 Comparison of tangential acceleration errors in non-vibrating environment
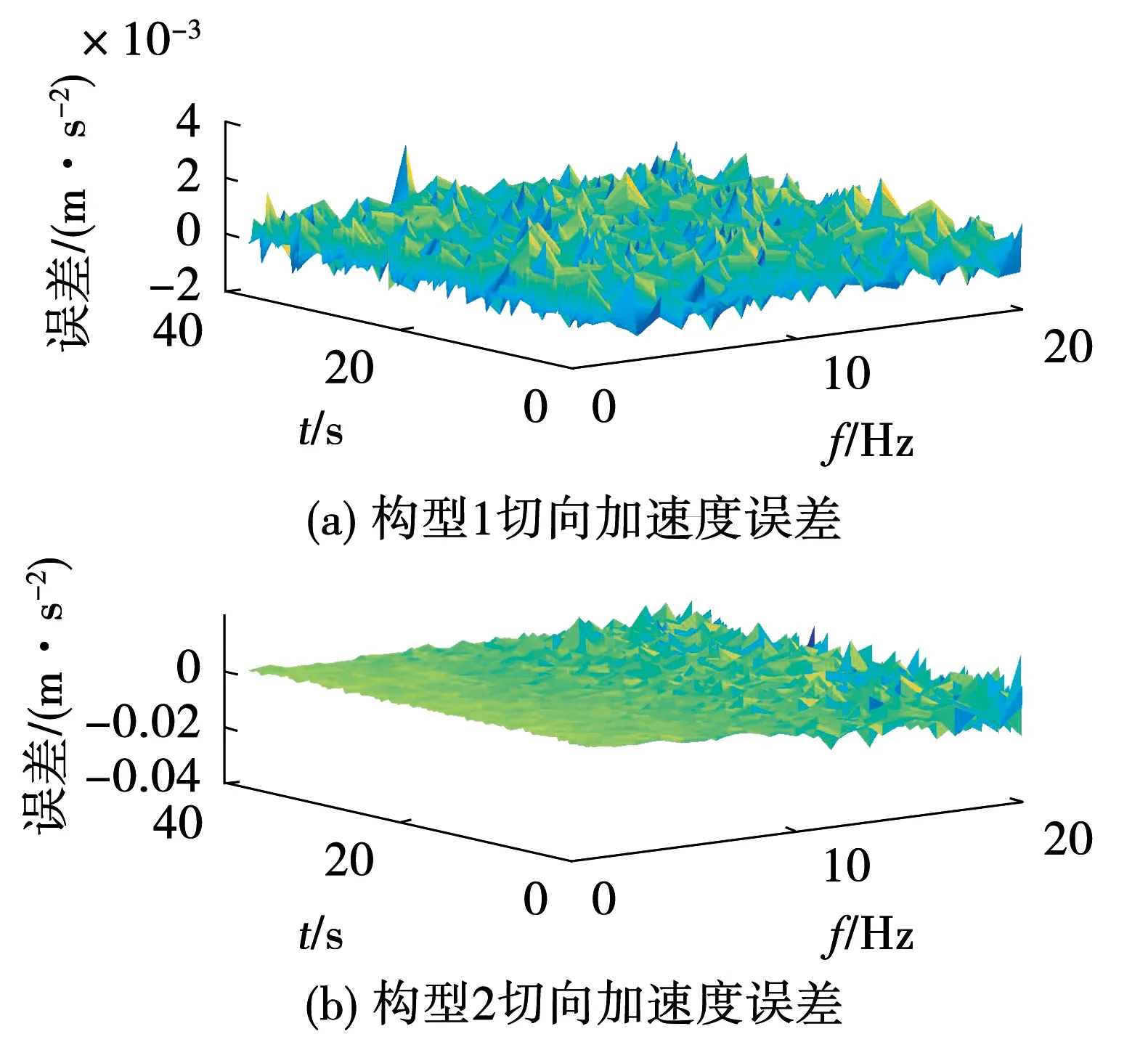
圖8 振動環境下切向加速度誤差對比
Fig.8 Comparison of tangential acceleration errors in vibrating environment
結合圖7、圖8可看到,無論是振動環境或非振動環境,低動態或高動態,構型1的性能總是優于構型2.但是構型1的安裝方式為斜置安裝,需要設計專用的標定工裝以及斜裝標定算法,給工程實現帶來一定的難度.構型2為正交安裝,可以利用重力加速度的幅值平方g2作為參考基準,在標定過程中不受安裝誤差角的影響.同時無須設計專用標定工裝,給工程實現帶來一定便利.
實際工程中,慣性器件經過一定時間的使用其自身性能參數會隨時間的推移與應用環境的變化而發生改變,同時在使用過程中由于摩擦、振動等因素的影響,慣性器件的安裝位置、安裝誤差角也可能發生變化,需重新標定才能滿足使用要求.因此對現場無精密標定設備、且工況為低振動、低動態環境,優先采用構型2.而高振動、高動態環境優先采用構型1.
4.2.4 內桿臂對多加速度計測姿的影響
由式(24)、式(26)可看到,多加速度計的內桿臂長度越長,多加速度計測姿精度越高.以非振動低動態環境下測姿為例,內桿臂l長度范圍為1 cm~4 cm,構型1和構型2的切向加速度誤差如圖9所示.
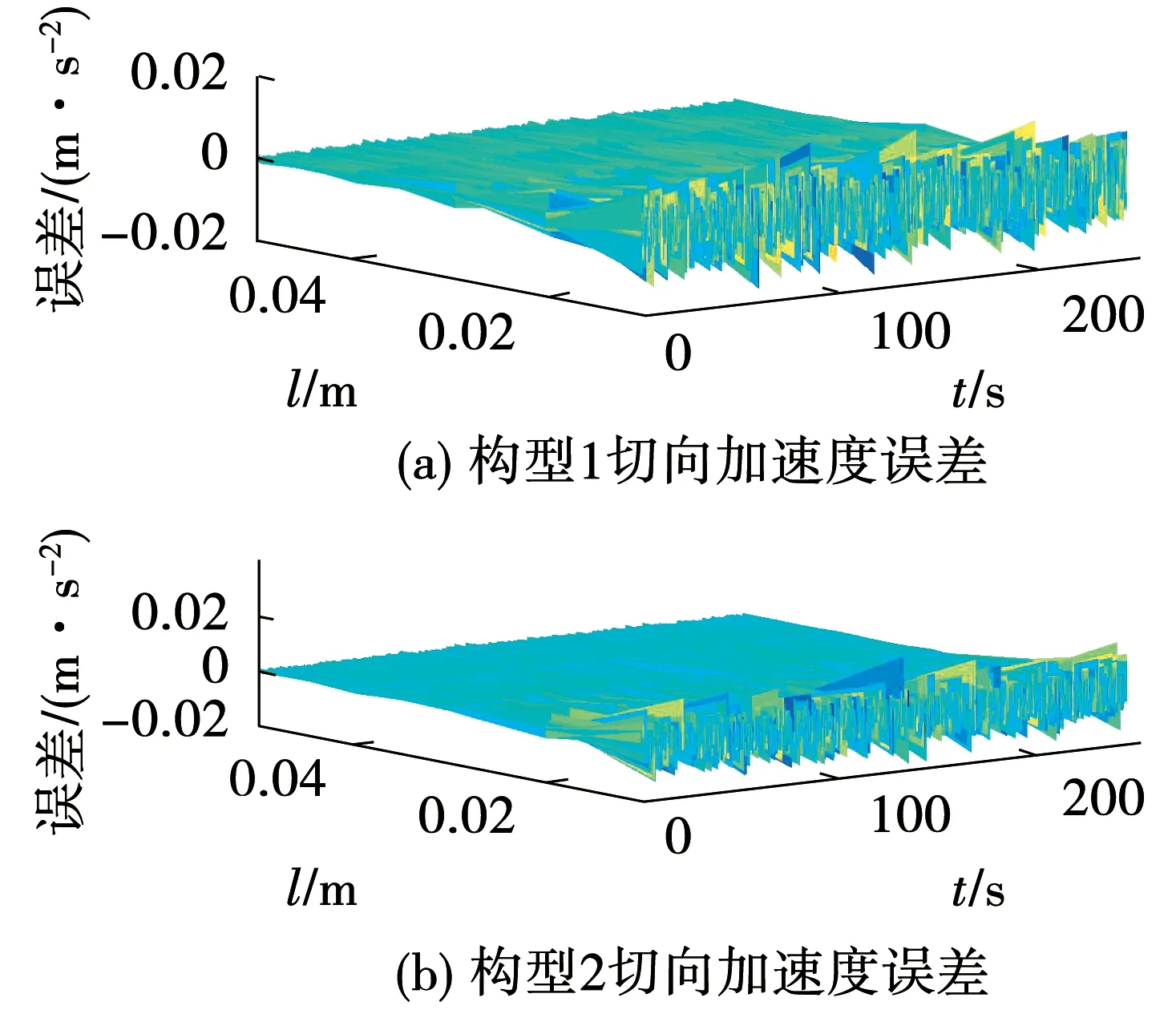
圖9 內桿臂長度對加速度計測姿的影響
Fig.9 Influence of inner lever arm on accelerometer attitude measurement
從圖9可以看到構型1和構型2內桿臂l越大,求解的角加速度誤差越小.但是在實際工程中,儀器安裝的空間總是有限的,為提高求解精度在有限的安裝空間里應盡可能增大內桿臂長度.
5 結 論
本文研究了桿臂效應誤差對加速度計測姿精度的影響,針對低通濾波法與力學補償法各自的不足,提出了一種改進的桿臂效應誤差補償方案.1)對向心加速度項,以振動角頻率為判別標準,在低于給定角頻率閾值時采用低通濾波法,在高于給定角頻率閾值時采用力學補償+低通濾波法.與傳統的低通濾波法對比,改進算法顯著提高了向心加速度項的補償精度.2)對切向加速度項,設計了兩種多加速度計構型方式,通過多加速度計解析求解角加速度,避免了角速度直接微分造成的誤差放大.3)對加速度計構型1和構型2在三種工況環境下的求解精度進行了分析,同時根據構型1、構型2標定參數的難易,確定了構型1和構型2的適用范圍.
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(2022年8期)2022-06-05 07:36:28
核科學與工程(2021年4期)2022-01-12 06:30:26
今日農業(2020年19期)2020-12-14 14:16:52
小學生必讀(中年級版)(2020年9期)2020-12-04 02:07:22
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國公路(2017年18期)2018-01-23 03:00:38
數學物理學報(2017年6期)2018-01-22 02:26:40
中學物理·高中(2016年12期)2017-04-22 11:53:03
小櫻桃·童年閱讀(2014年11期)2014-12-01 22:21:30
