基于近距無線電導航的容錯組合導航系統
2020-02-22 13:28:50朱敬生崔瀅
科學導報·學術 2020年56期
朱敬生 崔瀅

【摘?要】根據組合導航子系統的特點,提出了一種基于近距離無線電導航的容錯組合導航方案。該方法具有較強的檢測軟故降的能力,并利用分量檢測法提高了故障檢測的靈敏度,在無重置聯邦局部反饋校正的基礎上,改進了算法的容錯能力。
【關鍵詞】近距;無線電導航;容錯組合導航系統
引言
導航系統作為飛行管理系統(FMS)的重要組成部分向FMS實時提供載體的位置、速度、姿態信息。單一的導航系統很難滿足FMS對導航系統高精度、高可靠性、實時更新的要求。慣性導航系統(INS)作為一種完全自主的導航系統能夠實時連續地提供全姿態導航信息,并且具有隱蔽性好,抗干擾,參數更新快等優點,但是其誤差是隨時間積累的,對于長航時高精度的飛行器來說,這是無法克服的弱點。全球衛星導航系統(GPS)具有全局性、天氣友好性、高精度、三維定位等優點,但其在動態環境下的可靠性較差,容易受到地形目標和地物的遮擋,數據采集頻率較低,是一個非自主系統。近距無線電導航系統可用于軍用和民用機場。無線電導航系統具有導航時間短、設備簡單可靠、導航誤差不隨時間積累、導航精度低等優點,基于此,本文提出一種INS/GPS/無線電容錯組合導航系統,以求在子導航系統均正常工作的情況下,導航系統能夠提供高精度的導航參數輸出,在高動態或GPS出現不可用的情況下,系統能夠提供連續實時的不隨時間發散的導航解。
1組合導航子系統
INS子系統/GPS和INS/無線電子系統通過聯邦濾波器提供導航參數的最優估計。
1.1 INS/GPS組合子系統
組合導航系統將INS系統誤差記錄為一個狀態,東北天空坐標系為局部坐標系。SA誤差(隨機速度抖動和傳輸到星歷數據的隨機誤差)在美國已經消除,在組合導航系統中,可以把GPS的三維定位誤差和速度誤差看作白噪聲,INS-GPS組合導航系統的測量方程是基于GPS定位和速度測量的差分,并結合位置解和速度解。系統的測量如下:
其中,量測Zcps為慣導與GPS輸出載體的速度和位置差,VuGps為GPS的速度地測噪聲,Pwcrs為GPS的位量f測噪聲,則INS/GPS組合導航系統的狀態空間模型如下:
其中,為系統的誤差狀態;
為東向、北向和天向速度誤差;
為緯度、經度和高度誤差;
為俯仰、橫滾和航向角誤差;
εb=(εx,εy,εx)為東向、北向和天向陀螺的常值漂移;
為東向、北向和天向加速度計的常值零偏。
采用位置組合時:
1.2 INS/無線電組合子系統
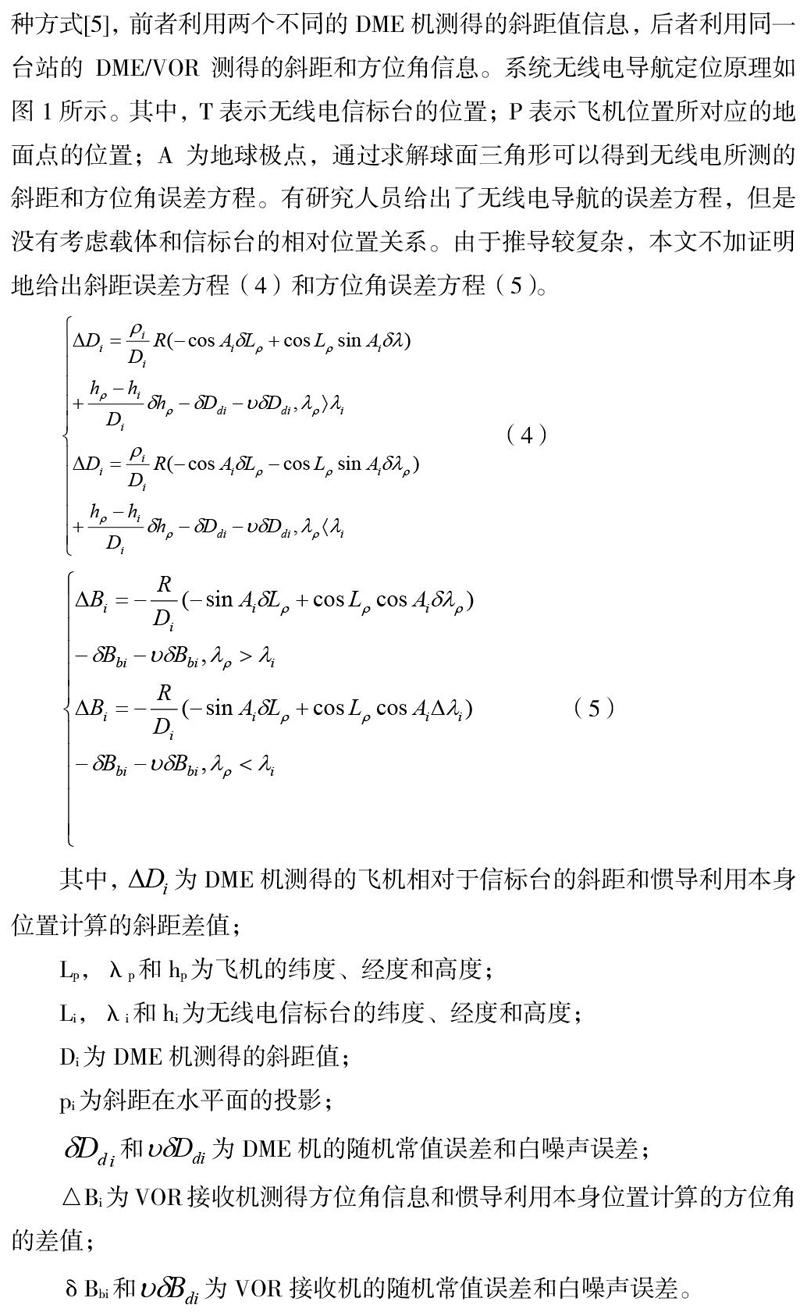
近距無線電導航定位系統可分為(ρ一p)定位和(ρ一θ)定位兩種方式[5],前者利用兩個不同的DME機測得的斜距值信息,后者利用同一臺站的DME/VOR測得的斜距和方位角信息。系統無線電導航定位原理如圖1所示。其中,T表示無線電信標臺的位置;P表示飛機位置所對應的地面點的位置;A為地球極點,通過求解球面三角形可以得到無線電所測的斜距和方位角誤差方程。有研究人員給出了無線電導航的誤差方程,但是沒有考慮載體和信標臺的相對位置關系。由于推導較復雜,本文不加證明地給出斜距誤差方程(4)和方位角誤差方程(5)。
其中,為DME機測得的飛機相對于信標臺的斜距和慣導利用本身位置計算的斜距差值;
Lp,λp和hp為飛機的緯度、經度和高度;
Li,λi和hi為無線電信標臺的緯度、經度和高度;
Di為DME機測得的斜距值;
pi為斜距在水平面的投影;
和為DME機的隨機常值誤差和白噪聲誤差;
△Bi為VOR接收機測得方位角信息和慣導利用本身位置計算的方位角的差值;
δBbi和為VOR接收機的隨機常值誤差和白噪聲誤差。
2容錯組合導航系統
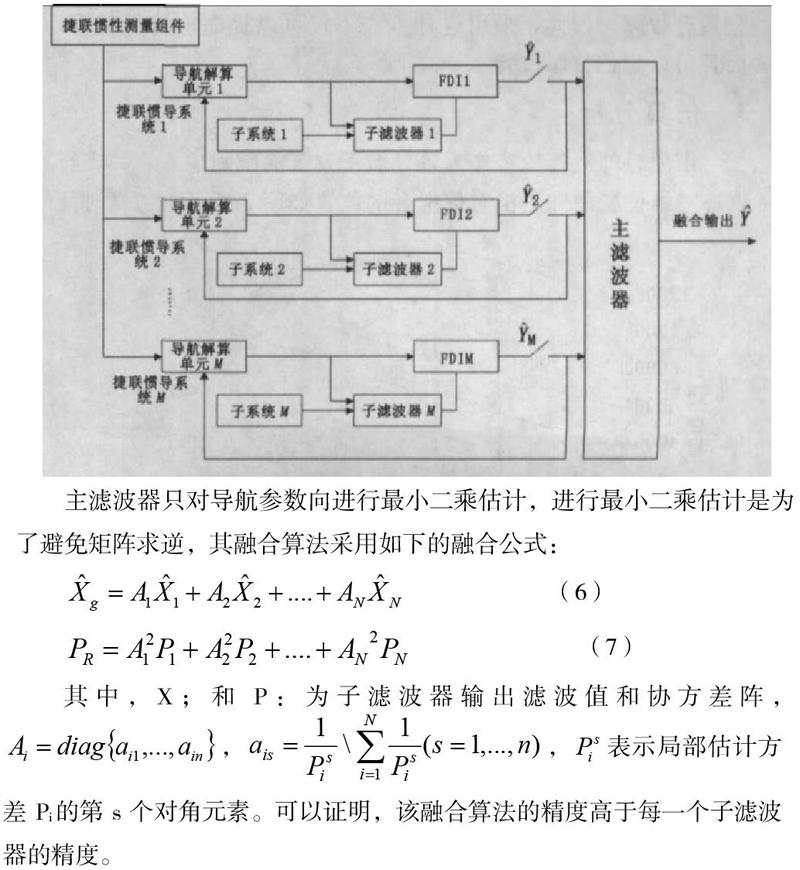
有文獻提出了6種結構的聯邦濾波器,指出無復位的聯邦濾波器具有良好的容錯性,并且這種結構不允許子濾波器的導航誤差校正。為了保證子系統狀態方程的精確性,有必要對慣導系統進行反饋,但是,為了保證系統的容錯性能,沒有必要用主濾波器輸出的總體估計值來重置子濾波器,使慣導系統不接收反饋校正。到。為了保證系統的容錯性能,避免了全局評估重設和反饋校正子濾波器的導航誤差,本文提出了一種基于局部反饋的非重設聯邦濾波器。它給出了一個帶下慣性計(SINS)和一千個導航單元的fed濾波器,使SINS成為常用的參考系統。各導航子系統的輸出和相應的導航解的輸出構成子系統濾波器的測量;每個子濾波器的卡爾曼濾波運算獨立地并行運行,并且每個子濾波器都采用反饋校正方式對各自導航解算單元的誤差進行修正。各個分離的經過反饋校正的導航解算單元輸出的導航參數是局部最優的。將這些局部最優的導航參數輸人到主濾波器中,通過主濾波器的信息融合算法得到導航參數的全局估計,其結構如圖1所示。
主濾波器只對導航參數向進行最小二乘估計,進行最小二乘估計是為了避免矩陣求逆,其融合算法采用如下的融合公式:
3結論
INS/GPS/無線電容錯組合導航系統能夠發揮各自導航系統的優點,采用局部反饋校正的無重置聯邦濾波器的系統融合最優加權算法,在減少計算量的同時確保融合精度高于任一子系統。
參考文獻:
[1]任旭陽.SINS/GPS/OD容錯組合導航系統研究[D].湖北:華中科技大學,2019.
[2]楊春.組合導航系統的故障檢測與容錯技術研究[D].江蘇:南京理工大學,2017.
[3]朱倚嫻.AUV組合導航系統容錯關鍵技術研究[D].江蘇:東南大學,2018.
[4]丁宏升,劉峰.基于聯邦濾波的容錯組合導航系統仿真分析[J].航空計算技術,2013,43(5):132-134.
(作者單位:中航飛機漢中飛機分公司)
