復雜系統可靠性分配計算方法及其在ROV 推進系統中的應用
2020-01-14 02:29:10曹海斌
艦船科學技術 2019年12期
張 康,郝 恒,曹海斌
(中國船舶科學研究中心,江蘇 無錫 214082)
0 引 言
水下機器人ROV(Remote Operated Vehicle)是深海施工作業的關鍵裝備。在研制ROV 設計過程中,需要基于任務可靠度進行各設備單元可靠度分配和評估計算,用以指導設備設計選型。常用的可靠性分配的方法主要包括等分配法、評分分配法、比例組合法、考慮復雜度和重要度的分配法等[1-4]。其中等分配法比較簡單直接,適用于產品各單元相同或者產品沒有承繼性且產品定義并不十分清晰的場合[5];評分分配法適用于可靠性數據非常缺乏的情況或者新研設備,只針對串聯系統[6-7];比例組合法適用于繼承性強、有歷史故障數據的產品[8];基于復雜度和重要度的分配法,考慮的影響因素不夠全面[9]。ROV 推進系統可靠性模型含有復雜的串并聯系統和表決系統,且新研設備缺乏歷史故障數據,因此不能直接利用上述常用的方法進行可靠性分配工作,亟需一種新的解決方法。擬提出一種綜合運用評分分配法和比例組合法的可靠性分配計算方法,解決可靠性模型中缺乏歷史故障數據,并且含有復雜串并聯系統及表決系統導致無法直接分配計算的問題。以ROV 推進系統為分析對象,根據作業任務需求建立推進系統的可靠性框圖及數學模型,基于所提出的可靠性分配方法,對含有復雜串并聯系統及表決系統的作業型ROV 推進系統進行可靠性分配計算,最終獲得各設備的可靠度分配值,實現所提方法的應用。
1 問題的提出
ROV 推進系統可劃分為垂直推進系統和水平推進系統,其中垂直推進系統由1 個垂直推進器驅動罐驅動4 個推進器進行上浮或者下潛運動,水平推進系統由1 個水平推進器驅動罐驅動4 個推進器完成前進或者后退運動并且配備2 個輔助推進器作為冗余備份,2 個輔助推進器由液壓控制閥箱驅動。根據特定作業任務需求,ROV 在水平方向和垂直方向同時調整姿態,其中4 個水平推進器中至少有3 個工作即可完成水平方向航行或者依靠2 個輔助推進器完成水平方向航行,4 個垂直推進器至少有3 個工作即可完成垂直方向航行。據此工作原理,建立的可靠性模型如圖1所示。
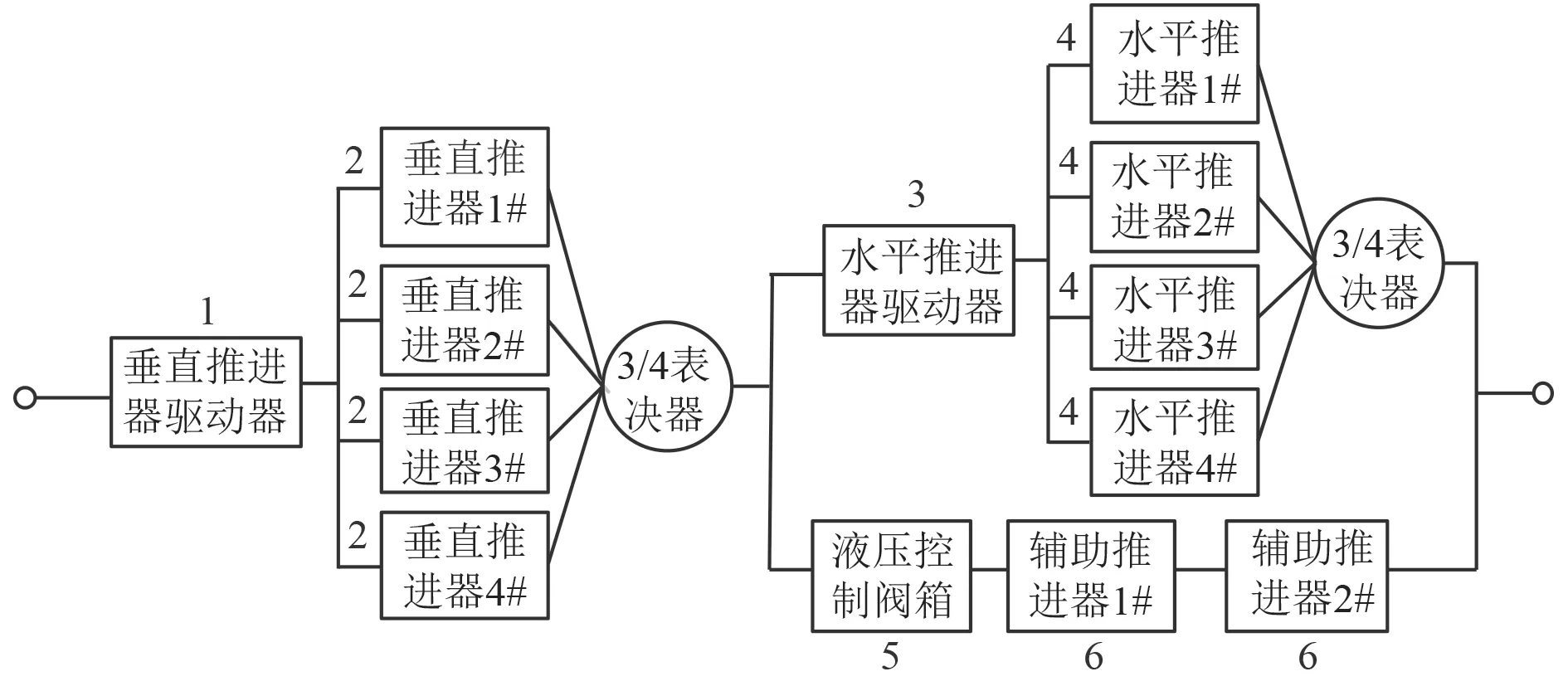
圖 1 推進系統可靠性框圖Fig.1 Reliability block diagram of ROV propulsion system
在進行可靠性分配時,推進系統突出的兩大特點是:1)考慮深海使用環境因素,推進系統設備缺乏歷史故障數據及相似產品的故障數據;2)該可靠性模型是一個復雜龐大的系統,不僅含有串并聯結構,而且還含有表決系統結構。基于以上特點,單純利用等分配法、評分分配方法、比例組合方法等常用的可靠性分配方法,并不能解決推進系統的可靠性模型計算問題,因此需要尋求一種新的解決方案。
2 可靠性分配計算方法
提出一種綜合運用評分分配法和比例組合法的可靠性分配計算方法,其基本思路為:首先基于評分分配法獲得評分系數作為設備單元的故障率基礎數據,然后再根據比例組合法的基本原理設定各設備單元的比例系數,以修正后的故障率代入可靠性數學模型方程中求解計算出未知的比例系數,最后根據相對比值給每個設備分配可靠性指標。
2.1 故障基礎數據建立
評分分配法一般廣泛適用于缺乏具體可靠性數據的分配中,擬利用評分分配法獲得的評分系數作為故障基礎數據。評分分配法的基本思想是通過有經驗的設計人員或專家對影響可靠性的幾種因素進行評分,并對評分值進行綜合分析,以獲得各單元產品之間的可靠性相對比值,進而給每個分系統或設備分配可靠性指標[10-11]。評分分配法的步驟詳細如下[6]:
1)評分因素
通常考慮的因素有產品的復雜程度、技術水平、工作時間和環境條件四大因素。
2)評分原則
各因素評分值范圍為1~10 分,評分數越高說明某分系統對該產品系統的可靠性影響越大。一般來說系統越復雜,可靠性程度越低,即系統最復雜的評10 分,最簡單的評1 分;技術水平的成熟度最高評1 分,最低評10 分;分系統一直工作的評10 分,工作時間最短評1 分;環境條件越惡劣和嚴酷評10 分,環境條件最好的評1 分。
3)評分法的具體計算實施
設產品的故障率為 λS,分配給每個單元或者分系統的故障率為 λi就可表示為:

式中, ci表示第i 個單元或者分系統的評分系數。

式中: ωi表 示第i 個單元或者分系統的評分數; ω表示產品的各單元或者分系統評分數之和。
式中: rij為第i 個單元,第j 個因素的評分數。

根據可靠度與故障率之間的關系可得:

式中: Ri為每個單元的可靠度; RM為產品的任務可靠度。按照式(5),可以將總的可靠度 RM分配給串聯結構的各分系統 Ri。
2.2 計算原理
建立各系統的可靠性數學模型,基于上述故障基礎數據并設定比例系數獲得修正的故障數據,然后再代入可靠性數學模型方程進行求解。
1)并聯系統
并聯系統是指系統中有n 個單元,只有當所有單元都不能正常工作,系統才無法正常工作。并聯系統的任務可靠性數學模型為:

式中:Rs(t)表 示系統可靠度; Ri(t)表示第i個單元可靠度。
可靠性分配方法計算原理具體如下:
步驟1根據評分法原理,對各單元進行評分,得到評分系數 ci。
步驟2將各單元的評分系數ci作為各自的故障率基礎數據,即假定為老產品相似單元故障率,之所以可按如此方式處理是因為評分分配法獲得評分系數是各單元故障率的比例數據值,并非實際故障率。根據比例組合的基本原則,假定各單元的分配值與老產品相似單元故障率之比相等,設比例系數為K,即[8]

得到各單元故障率分配值 λi,視為修正后的故障率值:

假設各單元的壽命仍服從指數分布,所以各單元分配的可靠度為:

而任務可靠度RM=e-λt,故

步驟3根據并聯系統可靠性模型,可得
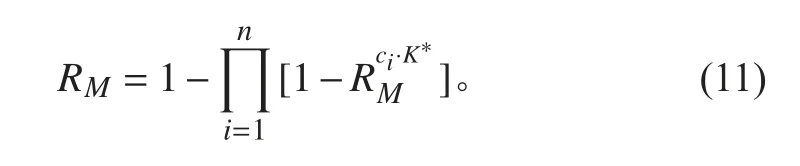
式中: RM和 ci為已知量,只有 K*為未知變量,通過反解方程或者圖形擬合逼近法可以很容易求解得到K*值。
步驟4在計算得到 K*值后,回代計算可得各單元的可靠度分配值為:

可以看出,串聯系統的可靠性分配值式(5)也可以寫成式(12)的形式并且 K*值為1,而并聯系統的K*為待求值。
2)串并聯系統
串并聯系統是指可靠性框圖中既含有串聯部分,也含有并聯支路部分,構成復雜的串并聯系統網絡,其可靠性數學模型需要根據網絡的各自特點建立。由若干串聯單元和一個并聯模塊所組成的串并聯系統可靠性數學模型可表示為:

式中: Rj(t)表示第1 到m 個串聯單元的可靠度,Ri(t)表示并聯模塊中第1 到n 個單元的可靠度。同理,當有多個并聯模塊時,可將單個并聯模塊作為整體,與其他串聯單元按照串聯模型邏輯關系建立復雜串并聯系統的可靠性模型。
串并聯系統的可靠性分配方法參照上述并聯系統可靠性分配方法,只是需要將代入式(13)所示的串并聯模型方程中求解未知數 K*,然后再回代計算各單元的可靠性分配值。
3)n 中取r 表決系統
n 中取r 系統是指系統中有n 個單元,只要其中至少有r 個單元正常,系統就能正常工作,這樣的系統構成r/n 表決系統。其可靠度數學模型(假定表決器可靠度為1)為:
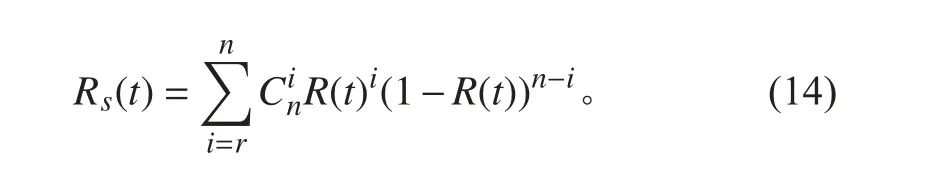
式中: Rs(t) 為系統可靠度; R(t)為各單元可靠度。由于n 中取r 表決系統中各單元相同,因此默認各單元可靠度相同。
表決系統的可靠性分配方法參照上述并聯系統可靠性分配方法,只是需要將代入式(14)所示的串并聯模型方程中求解未知數 K*,然后再回代計算各單元的可靠性分配值。
3 算例應用
相同設備的可靠度分配值相同,依據前述計算方法建立推進系統任務可靠性數學模型為
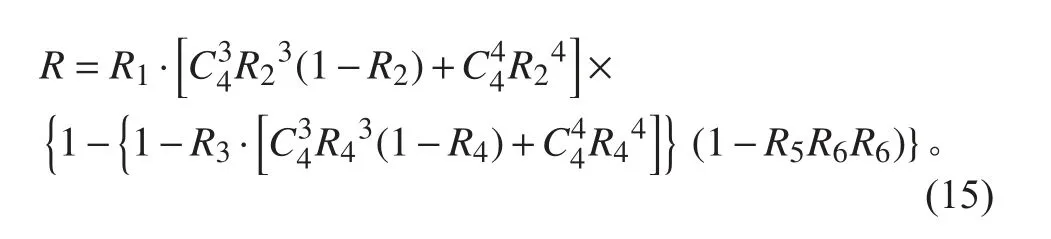
推進系統從一級系統分配到的可靠度 R= 0.961,將此可靠度分配到各設備單元。按照所提出的可靠性分配方法,首先由多名熟悉ROV 各系統供能及工作原理并且具備豐富經驗的專家給各設備打分,然后加權求平均法獲得四大因素的分值,如表1 所示。
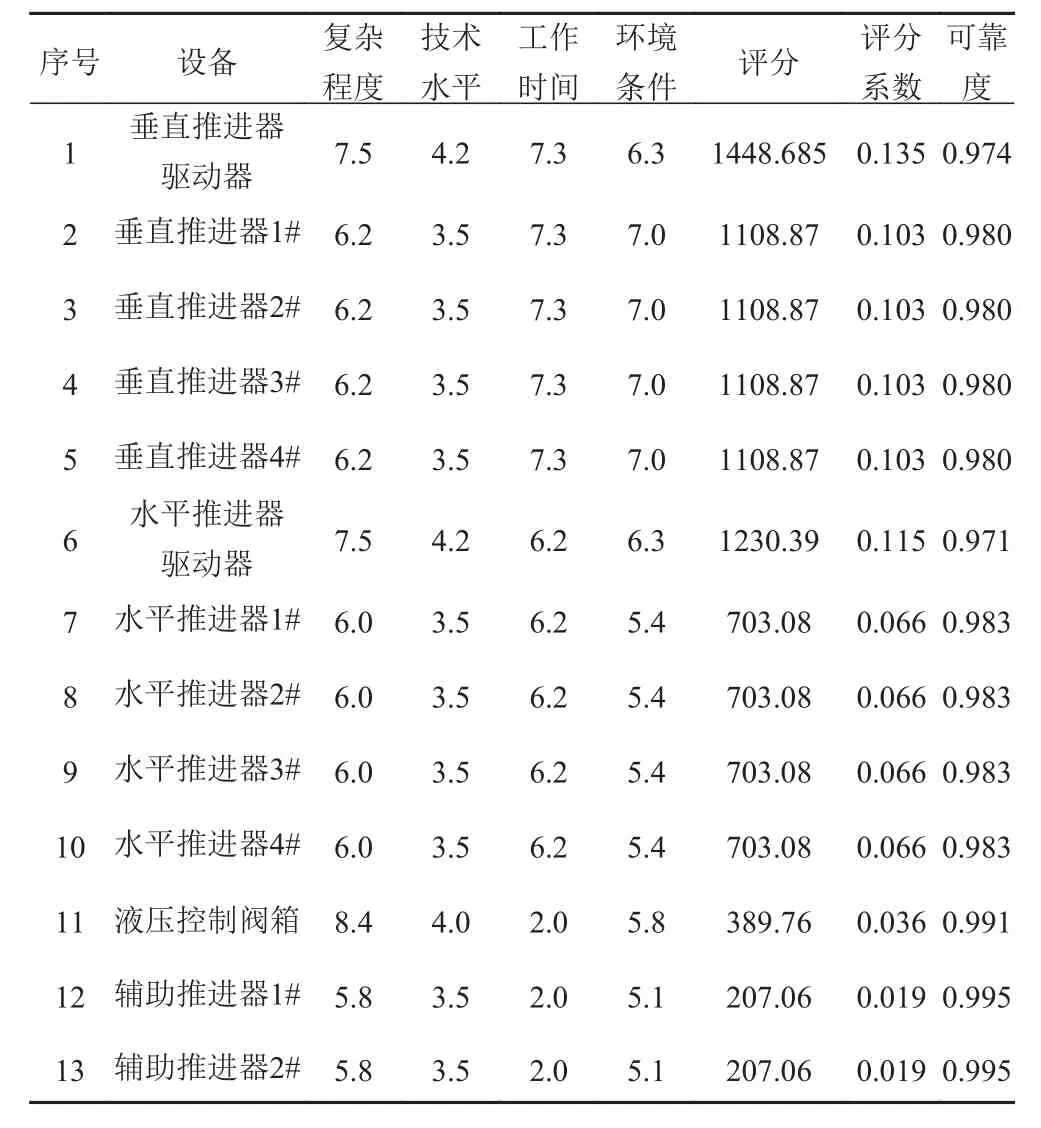
表 1 推進系統評分表及任務可靠性分配結果Tab.1 Scoring and Reliability Allocation Results of Propulsion System
然后參照第2 章算法,任務可靠性數學模型可以變換為:
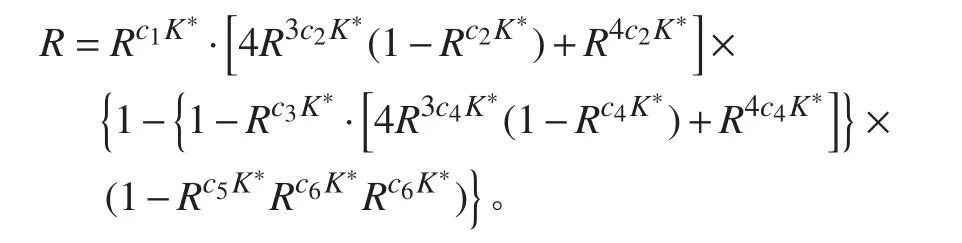
用繪圖逼近法求得在 R= 0.961 時, K*=6.53,再代入式(12)可以求得推進系統各組成設備的可靠度分配值(見表1)。從表1 可以看出,垂直推進器和水平推進器分配的可靠度相差不大,但輔助推進器分配了最高的可靠度為0.995,這主要是由于相對于其他推進器而言輔助推進器工作時間較短的緣故,而與之配套的液壓控制閥箱也獲得了較高的可靠性。建議在設計選型時,提高輔助推進器及配套的液壓控制閥箱的可靠性。推進器驅動器由于其設備復雜程度較高技術水平一般,而且工作時間也長,因此分配到的可靠度較低。
4 結 語
針對ROV 推進系統復雜的可靠性模型特點,瞄準在可靠性分配計算過程中出現的無法直接利用常規分配方法開展工作的實際工程問題,提出了一種含復雜系統可靠性模型的分配計算方法。以含有復雜串并聯系統及表決系統的ROV 推進系統可靠性模型計算為例,應用所述方法進行建模計算,得到了推進系統各組成設備的可靠度分配值。結果表明,所提出的可靠性分配計算方法可以有效克服常規分配方法無法直接用于復雜串并聯系統及表決系統的缺點,為ROV 其他系統以及類似系統的可靠性分配工程設計提供技術支撐。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
鐵道通信信號(2020年9期)2020-02-06 09:15:22
數學大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學科學(學生版)(2019年5期)2019-05-21 01:00:18
經濟技術協作信息(2018年30期)2018-11-22 06:20:24
