工業(yè)無(wú)線(xiàn)網(wǎng)絡(luò)的智能搬運(yùn)機(jī)器人實(shí)驗(yàn)平臺(tái)設(shè)計(jì)
2020-01-13 09:48:42鄧小寶史運(yùn)濤李小虎胡子佳
實(shí)驗(yàn)室研究與探索 2019年12期
關(guān)鍵詞:智能實(shí)驗(yàn)
李 超, 鄧小寶, 史運(yùn)濤, 李小虎, 胡子佳
(北方工業(yè)大學(xué) 現(xiàn)場(chǎng)總線(xiàn)技術(shù)及自動(dòng)化北京市重點(diǎn)實(shí)驗(yàn)室,北京 100144)
0 引 言
隨著科技的發(fā)展,搬運(yùn)機(jī)器人在智能制造領(lǐng)域的應(yīng)用越來(lái)越廣泛,生產(chǎn)過(guò)程對(duì)于搬運(yùn)機(jī)器人的要求越來(lái)越高。傳統(tǒng)離線(xiàn)編程的搬運(yùn)機(jī)器人按照固定路徑進(jìn)行工作,當(dāng)生產(chǎn)環(huán)境發(fā)生變化時(shí),需重新編程以適應(yīng)新環(huán)境,適用性不足。
近年來(lái),雙目視覺(jué)技術(shù)日益成熟,各種測(cè)距、定位算法不斷優(yōu)化,測(cè)距和定位的準(zhǔn)確度不斷提升[1-5]。工業(yè)無(wú)線(xiàn)可以降低現(xiàn)場(chǎng)的布線(xiàn)成本,提升空間利用率,同時(shí)工業(yè)無(wú)線(xiàn)傳輸機(jī)制不斷發(fā)展,工業(yè)無(wú)線(xiàn)的可靠性不斷提高[6-8]。為提升搬運(yùn)機(jī)器人的智能化程度和可靠性,增強(qiáng)學(xué)生對(duì)搬運(yùn)機(jī)器人和視覺(jué)技術(shù)的應(yīng)用能力,本文根據(jù)企業(yè)實(shí)際生產(chǎn)需求,結(jié)合實(shí)驗(yàn)室承擔(dān)科研項(xiàng)目,將雙目視覺(jué)應(yīng)用于搬運(yùn)機(jī)器人[9-12],使用PLC作為搬運(yùn)機(jī)器人的主控制器,同時(shí)利用工業(yè)無(wú)線(xiàn)實(shí)現(xiàn)搬運(yùn)機(jī)器人和控制中心之間的數(shù)據(jù)交互,設(shè)計(jì)開(kāi)發(fā)了該智能搬運(yùn)機(jī)器人實(shí)驗(yàn)平臺(tái)。實(shí)驗(yàn)證明,該實(shí)驗(yàn)平臺(tái)可綜合鍛煉學(xué)生處理復(fù)雜工程問(wèn)題的能力。
1 系統(tǒng)整體方案設(shè)計(jì)
該實(shí)驗(yàn)平臺(tái)由智能搬運(yùn)機(jī)器人和控制中心兩部分組成。智能搬運(yùn)機(jī)器人完成目標(biāo)物識(shí)別、測(cè)距、抓取和搬運(yùn)功能,控制中心完成對(duì)智能搬運(yùn)機(jī)器人的監(jiān)控。通過(guò)位于控制中心的無(wú)線(xiàn)接入點(diǎn)(AP)和位于智能搬運(yùn)機(jī)器人的無(wú)線(xiàn)客戶(hù)端實(shí)現(xiàn)無(wú)線(xiàn)通信,進(jìn)而實(shí)現(xiàn)智能搬運(yùn)機(jī)器人和控制中心的數(shù)據(jù)交互,同時(shí)將實(shí)驗(yàn)環(huán)境視頻數(shù)據(jù)傳輸?shù)揭曨l監(jiān)控站。系統(tǒng)整體架構(gòu)如圖1所示。

圖1 系統(tǒng)整體架構(gòu)圖
2 系統(tǒng)硬件設(shè)計(jì)
2.1 智能搬運(yùn)機(jī)器人
智能搬運(yùn)機(jī)器人由全向移動(dòng)平臺(tái)、機(jī)械臂、PLC、樹(shù)莓派、雙目攝像頭、無(wú)線(xiàn)客戶(hù)端、交換機(jī)、IP攝像頭和電源模塊構(gòu)成。全向移動(dòng)平臺(tái)采用3個(gè)麥克納姆輪,以實(shí)現(xiàn)全向移動(dòng)功能;PLC可靠性高、抗干擾能力強(qiáng),S7-1200 PLC通過(guò)RS-232通信控制xArm機(jī)械臂和全向移動(dòng)平臺(tái)[13-14],并完成與Raspberry Pi3 B+(樹(shù)莓派)的數(shù)據(jù)交互;使用Raspberry Pi3 B+提供Python編程環(huán)境,編程實(shí)現(xiàn)目標(biāo)物識(shí)別和測(cè)距功能;通過(guò)kingcent雙目攝像頭獲取圖像;無(wú)線(xiàn)客戶(hù)端SCALANCE W734、沃仕達(dá)IP攝像頭和S7-1200 PLC通過(guò)工業(yè)以太網(wǎng)線(xiàn)接入SCALANCE XB208二層交換機(jī)。智能搬運(yùn)機(jī)器人結(jié)構(gòu)如圖2所示,圖中A、B、C、D、E、F、G點(diǎn)對(duì)應(yīng)各個(gè)模塊的安裝位置;智能搬運(yùn)機(jī)器人實(shí)物如圖3所示。
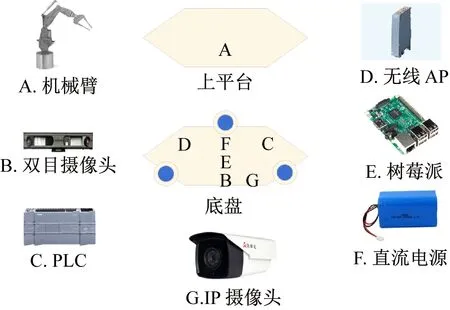
圖2 智能搬運(yùn)機(jī)器人結(jié)構(gòu)圖

圖3 智能搬運(yùn)機(jī)器人實(shí)物圖
2.2 控制中心
控制中心由HMI、PLC、無(wú)線(xiàn)AP、交換機(jī)和視頻監(jiān)控站構(gòu)成。HMI實(shí)現(xiàn)人機(jī)交互功能,選型為KTP700 Basic。S7-1200 PLC和HMI連入同一子網(wǎng),完成對(duì)智能搬運(yùn)機(jī)器人的監(jiān)控功能[15-16];選用SCALANCE W774作為無(wú)線(xiàn)AP,在實(shí)驗(yàn)室中,為保證無(wú)線(xiàn)AP和無(wú)線(xiàn)客戶(hù)端之間的通信質(zhì)量,W774和W734均選用IEEE 802.1n協(xié)議,使用5G Hz通信頻段;采用SCALANCE XB208二層交換機(jī)擴(kuò)展以太網(wǎng)接口。
3 系統(tǒng)軟件設(shè)計(jì)
系統(tǒng)軟件分為下位機(jī)部分和雙目視覺(jué)部分,下位機(jī)程序完成接收雙目視覺(jué)數(shù)據(jù)、控制機(jī)械臂和全向移動(dòng)平臺(tái)功能;雙目視覺(jué)程序完成目標(biāo)物識(shí)別和測(cè)距功能。智能搬運(yùn)機(jī)器人工作流程如圖4所示。
3.1 下位機(jī)程序設(shè)計(jì)
S7-1200 PLC控制程序設(shè)計(jì)如下:閾值設(shè)定為智能搬運(yùn)機(jī)器人抓取目標(biāo)物時(shí)的最佳距離,在本次實(shí)驗(yàn)中閾值設(shè)置為22 cm。當(dāng)智能搬運(yùn)機(jī)器人與目標(biāo)物距離大于閾值時(shí),PLC通過(guò)RS-232發(fā)送數(shù)據(jù)幀控制移動(dòng)平臺(tái)移動(dòng);當(dāng)智能搬運(yùn)機(jī)器人與目標(biāo)物距離小于或等于閾值時(shí),智能搬運(yùn)機(jī)器人停止移動(dòng)。根據(jù)不同的抓取距離,為機(jī)械臂編制不同的動(dòng)作組,并將不同動(dòng)作組的數(shù)據(jù)存放到PLC的數(shù)據(jù)塊中。當(dāng)PLC接收到雙目視覺(jué)提供的目標(biāo)物顏色和距離信息時(shí),將對(duì)應(yīng)的動(dòng)作組數(shù)據(jù)通過(guò)RS-232發(fā)送給機(jī)械臂,控制機(jī)械臂抓取目標(biāo)物。

圖4 智能搬運(yùn)機(jī)器人工作流程圖
將控制中心S7-1200 PLC設(shè)為IO控制器,將智能搬運(yùn)機(jī)器人S7-1200 PLC設(shè)為IO設(shè)備,建立智能傳輸區(qū)實(shí)現(xiàn)兩臺(tái)PLC變量之間的工業(yè)無(wú)線(xiàn)連接,通過(guò)S7通訊方式實(shí)現(xiàn)數(shù)據(jù)交互。
3.2 雙目視覺(jué)程序設(shè)計(jì)
以不同顏色的小型正方體為抓取目標(biāo)物,通過(guò)對(duì)雙目攝像頭標(biāo)定以消除圖像畸變,對(duì)圖像依次進(jìn)行預(yù)處理、顏色過(guò)濾、輪廓提取,計(jì)算得出視差,進(jìn)而通過(guò)空間坐標(biāo)系變換計(jì)算出距離。
(1) 圖像預(yù)處理。通過(guò)高斯濾波對(duì)圖像進(jìn)行預(yù)處理,以減小圖像的噪聲影響。原圖像如圖5所示,預(yù)處理后圖像如圖6所示。

圖5 原圖像

圖6 預(yù)處理后圖像
(2) 顏色過(guò)濾。通過(guò)顏色過(guò)濾,篩選出目標(biāo)物。雙目攝像頭拍到的圖像基于RGB顏色模型,但RGB顏色模型難以找出準(zhǔn)確的顏色范圍,所以在進(jìn)行顏色過(guò)濾之前,先將圖像從RGB顏色空間轉(zhuǎn)換到HSV顏色空間,進(jìn)行顏色過(guò)濾后再轉(zhuǎn)換回RGB顏色空間進(jìn)行后續(xù)操作。在HSV顏色空間中,H指色調(diào),取值范圍為0°~360°;S代表飽和度,取值范圍為0~1;V代表亮度,取值范圍為0~1,表明顏色明亮的程度。顏色過(guò)濾后圖像如圖7所示,顏色過(guò)濾流程如圖8所示。
圖7 顏色過(guò)濾后圖像

圖8 顏色過(guò)濾流程圖
(3) 輪廓提取。對(duì)顏色過(guò)濾得到的圖像進(jìn)行高斯濾波、開(kāi)運(yùn)算、腐蝕,消除圖像中的噪聲,對(duì)新的圖像進(jìn)行輪廓提取,將提取得到的輪廓標(biāo)注在原圖中。輪廓過(guò)濾預(yù)處理后圖像如圖9所示,輪廓提取標(biāo)注如圖10所示。

圖9 輪廓過(guò)濾預(yù)處理圖

圖10 輪廓提取標(biāo)注圖
(4) 雙目測(cè)距。在輪廓提取時(shí),找到目標(biāo)輪廓的中心坐標(biāo),將右攝像頭成像的中心坐標(biāo)映射到左攝像頭的坐標(biāo)系中,計(jì)算兩個(gè)中心坐標(biāo)對(duì)應(yīng)的視差,利用空間坐標(biāo)系轉(zhuǎn)換得到目標(biāo)物塊的三維坐標(biāo),即可得目標(biāo)物距離信息。
4 系統(tǒng)調(diào)試
在控制中心的HMI上啟動(dòng)智能搬運(yùn)機(jī)器人,智能搬運(yùn)機(jī)器人檢測(cè)目標(biāo)物,并將要抓取的目標(biāo)物顏色和距離顯示在控制中心的HMI上,HMI界面如圖11所示。

圖11 HMI界面
智能搬運(yùn)機(jī)器人檢測(cè)到目標(biāo)物,對(duì)目標(biāo)物進(jìn)行識(shí)別、抓取和搬運(yùn)操作,在本實(shí)驗(yàn)中以黃色長(zhǎng)方體標(biāo)志為搬運(yùn)終點(diǎn)。抓取目標(biāo)物如圖12所示,搬運(yùn)目標(biāo)物如圖13所示,放置目標(biāo)物如圖14所示。

圖12 抓取目標(biāo)物圖

圖13 搬運(yùn)目標(biāo)物圖

圖14 放置目標(biāo)物圖
5 結(jié) 語(yǔ)
本文根據(jù)企業(yè)實(shí)際生產(chǎn)需求,結(jié)合控制中心功能設(shè)計(jì),以實(shí)驗(yàn)室現(xiàn)有全向移動(dòng)平臺(tái)為基礎(chǔ),融合工業(yè)無(wú)線(xiàn)、雙目視覺(jué)和PLC,設(shè)計(jì)完成了一種智能搬運(yùn)機(jī)器人實(shí)驗(yàn)平臺(tái)。經(jīng)實(shí)驗(yàn)測(cè)試,該實(shí)驗(yàn)平臺(tái)運(yùn)行效果穩(wěn)定,實(shí)現(xiàn)了智能搬運(yùn)機(jī)器人對(duì)于目標(biāo)物的識(shí)別、抓取和搬運(yùn)功能;控制中心可通過(guò)工業(yè)無(wú)線(xiàn)網(wǎng)絡(luò)獲取智能搬運(yùn)機(jī)器人的雙目視覺(jué)數(shù)據(jù)和實(shí)驗(yàn)環(huán)境視頻數(shù)據(jù),實(shí)現(xiàn)對(duì)現(xiàn)場(chǎng)的實(shí)時(shí)監(jiān)測(cè),并完成對(duì)智能搬運(yùn)機(jī)器人的遠(yuǎn)程控制。通過(guò)在我校電氣自動(dòng)化類(lèi)專(zhuān)業(yè)實(shí)踐教學(xué)中的應(yīng)用表明,該實(shí)驗(yàn)平臺(tái)有助于培養(yǎng)學(xué)生的工程意識(shí)和工程能力,增強(qiáng)學(xué)生項(xiàng)目合作能力和創(chuàng)新意識(shí),提高學(xué)生解決復(fù)雜工程問(wèn)題的能力,取得了良好的教學(xué)效果。
猜你喜歡
小獼猴智力畫(huà)刊(2022年9期)2022-11-04 02:31:42
中學(xué)生數(shù)理化·中考版(2022年11期)2022-02-16 07:01:20
小哥白尼(趣味科學(xué))(2019年6期)2019-10-10 01:01:50
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
發(fā)明與創(chuàng)新(2016年38期)2016-08-22 03:02:52

- 實(shí)驗(yàn)室研究與探索的其它文章
- 高 校 輻 射 安 全 管 理 的 實(shí) 踐 與 探 索
- 基于語(yǔ)言信息的經(jīng)管類(lèi)實(shí)驗(yàn)教學(xué)質(zhì)量評(píng)價(jià)方法及應(yīng)用
- 日本產(chǎn)學(xué)官合作國(guó)際化人才培養(yǎng)模式改革的啟示
——以日本名古屋大學(xué)為例 - 本科生分子生物學(xué)實(shí)驗(yàn)延伸課堂的教學(xué)實(shí)踐
- 基于QFD理論的經(jīng)營(yíng)管理虛擬仿真實(shí)訓(xùn)課程教學(xué)設(shè)計(jì)
- 肩負(fù)起新時(shí)代高校育人的歷史使命
——淺談新時(shí)代《實(shí)驗(yàn)室研究與探索》期刊的責(zé)任與擔(dān)當(dāng)