基 于 電 磁 傳 感 器 的 智 能 車 循 線 算 法
2020-01-13 09:48:38楊子義陳夢婷
實驗室研究與探索 2019年12期
關鍵詞:智能
楊子義, 陳夢婷
(貴陽學院 電子與通信工程學院,貴陽 550005)
0 引 言
根據恩智浦杯全國大學生智能車大賽電磁組的規則,賽道中心鋪設有電磁引導線。引導線為一條鋪設在賽道中心線上的漆包線,其中通有20 kHz、100 mA的交變電流[1]。智能車必須通過電磁傳感器檢測磁場的變化情況,并設計相應的算法來判斷引導線的空間位置,基于此來調整智能車的行車方向和速度,最終實現循線行駛。傳統的差比和算法單調,工作區間過小,智能車會出現竄道的情況。由于感應線圈產生的感應電動勢是位置x的偶函數[1],智能車只安裝一個電感是無法定位小車的。如果智能車安裝了雙電感,兩個電感感應電動勢的差值與電感坐標的函數僅在很有限的區間呈現為單調函數[1],如果小車的位置越過該范圍就無法實現智能車的準確控制。孫書詠[2]提出的三電感方案對雙電感的方案進行了改進,但也并沒有解決單調區間過小的問題。朱昌平等[3]對賽道周圍的磁場分布及攝像頭的布局做了分析,對車模做了機械改裝。林生生等[4]在雙電感的基礎上對歸一化式子進行了求導,把和項的冪升高,得到了較大的單調區間,不足之處是檢測的精度下降了,算法也比較復雜,不利于編程實現。陳國定等[5]對電感的雙T型及八字形排布方案進行了討論。陳泓宇等[6]采用3個電感差比和的處理方法也未能得到一個較大區間的單調函數[6]。周玉媚等[7]采用的歸一化算法就是傳統的差比和算法,然后對PD算法做了研究。楊建明等[8]將傳統的雙電感方案進行了改進,擴展了單調區間,然而計算偏差的公式不統一。唐昊等[9]采用的是四電感方案,然后采用多項式擬合算法沒有解決這個單調區間過窄的問題。楊建姣等[10]只是對PID算法進行了討論。王靜等對一般的算法進行了綜述[11]。張利民等[12-13]討論的是函數擬合的方法。張曉峰等[14]基于雙電感方案提出將左電感和右電感感應電動勢開方之后做差再除以它們的感應電動勢之和得到偏差值,得到了一個單調的函數,然而這在計算機編程時會降低智能車的處理速度。朱敖天[15]討論的就是傳統的歸一化算法,沒有對這個算法做改進。王靖宇等[16]設計了電感的分布并改進了算法,但是比較復雜,改進后效果如何沒有討論。基于此,本文設計了一個基于3個電磁傳感器的有效算法,軌道檢測系統的單調工作區間能夠大大地擴大至整個實數空間。智能車在偏離引導線較大的情況下也能從新返回賽道,從而實現智能車的有效控制。
1 單電感的工作特性
漆包線中通的是20 kHz的交流電,電磁傳感器設置如圖1所示[2]。電磁軌道位于地面,線圈距離地面的高度為h,建立如圖所示坐標軸,O為坐標原點,向左為正方向。以左線圈為研究對象,其坐標為x,傳感器線圈位于豎直平面且平行于電磁軌道。根據安培環路定理,直導線電磁軌道在周圍會產生磁場B,磁場的水平分量B1會決定線圈內的磁通量,根據法拉第電磁感應定律,智能車在運動的過程中磁通量會發生變化而產生感應電動勢。
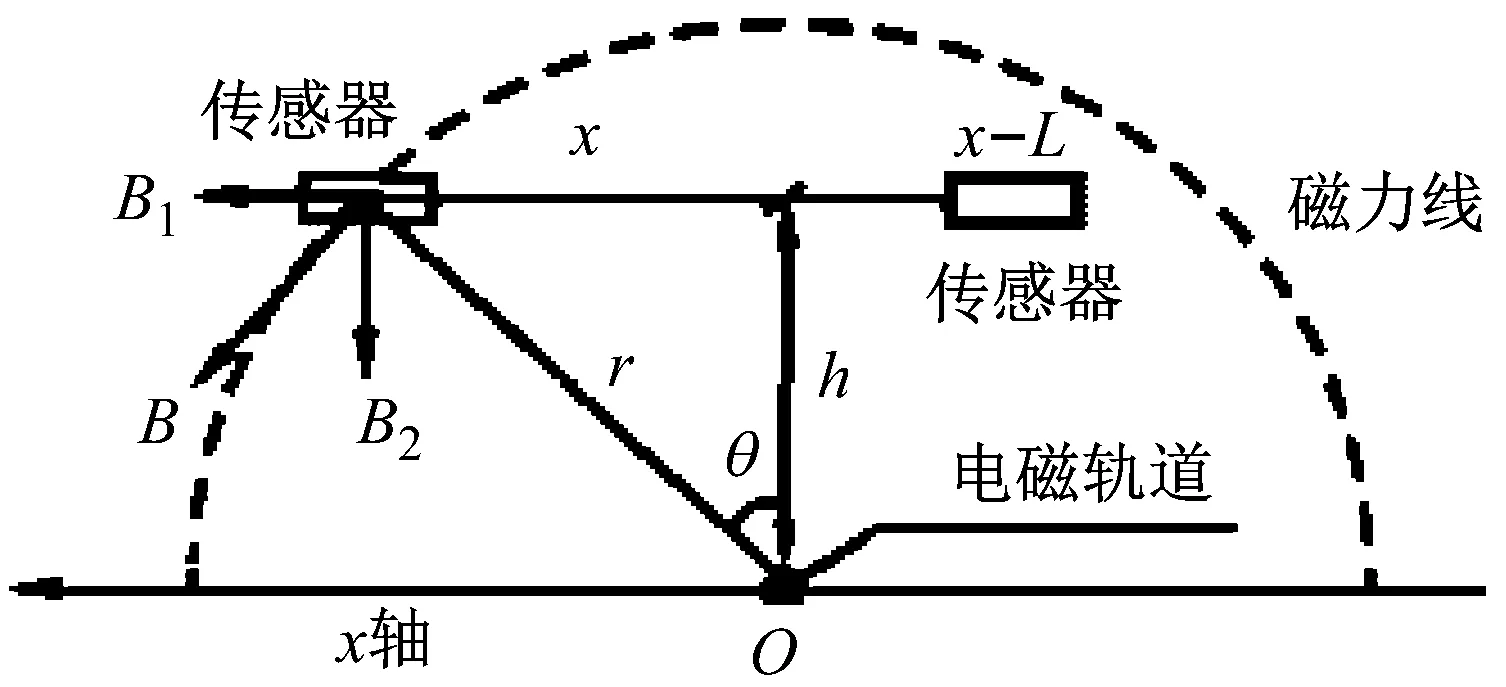
圖1 電磁傳感器設置
線圈感應電動勢E與左線圈坐標x的關系:
(1)
式中,C為系數,工程上不妨直接認為感應電動勢[1]
(2)
感應電動勢與x的關系如圖2所示,當電感坐標為0時,電感位于電磁軌道正上方時感應電動勢最大,此函數為關于x的偶函數,同一個感應電動勢值有2個坐標值與之對應,無法實現小車的準確定位。
2 雙電感方案
電感相當于智能車的眼睛,控制算法建立在電感分布的基礎上。雙電感方案是在一個電感的基礎上再增加一個電感,如圖2所示。左電感的坐標為x,右電感通過兩電感的感應電動勢之差判斷出智能車的位置,同時也可預測電磁軌道的走向。
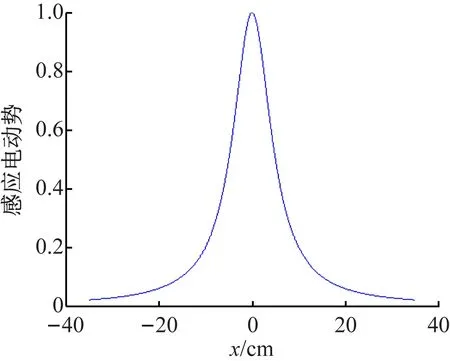
圖2 單電感感應電動勢
如圖2所示,左電感與右電感的感應電動勢之差為
(3)
若取L=30 cm,可以做出雙電感電影電動勢與左電感坐標的的函數圖像如圖3所示,當左電感的坐標為15 cm時,雙電感的中心恰好處于跑道中央,感應電動勢差值為0。顯然,當左電感的坐標為0~30 cm時,感應電動勢差值與左電感的坐標呈現為單調函數,可以采集感應電動勢信號實現智能車的定位。不足之處是此區間大小有限,函數曲線變化劇烈。而且當智能車從直線軌道過度到坡道路段時,電感與電磁軌道的距離h會發生變化,使得感應電動勢之差發生大幅度的變化。差比和的算法可以消除這個干擾。
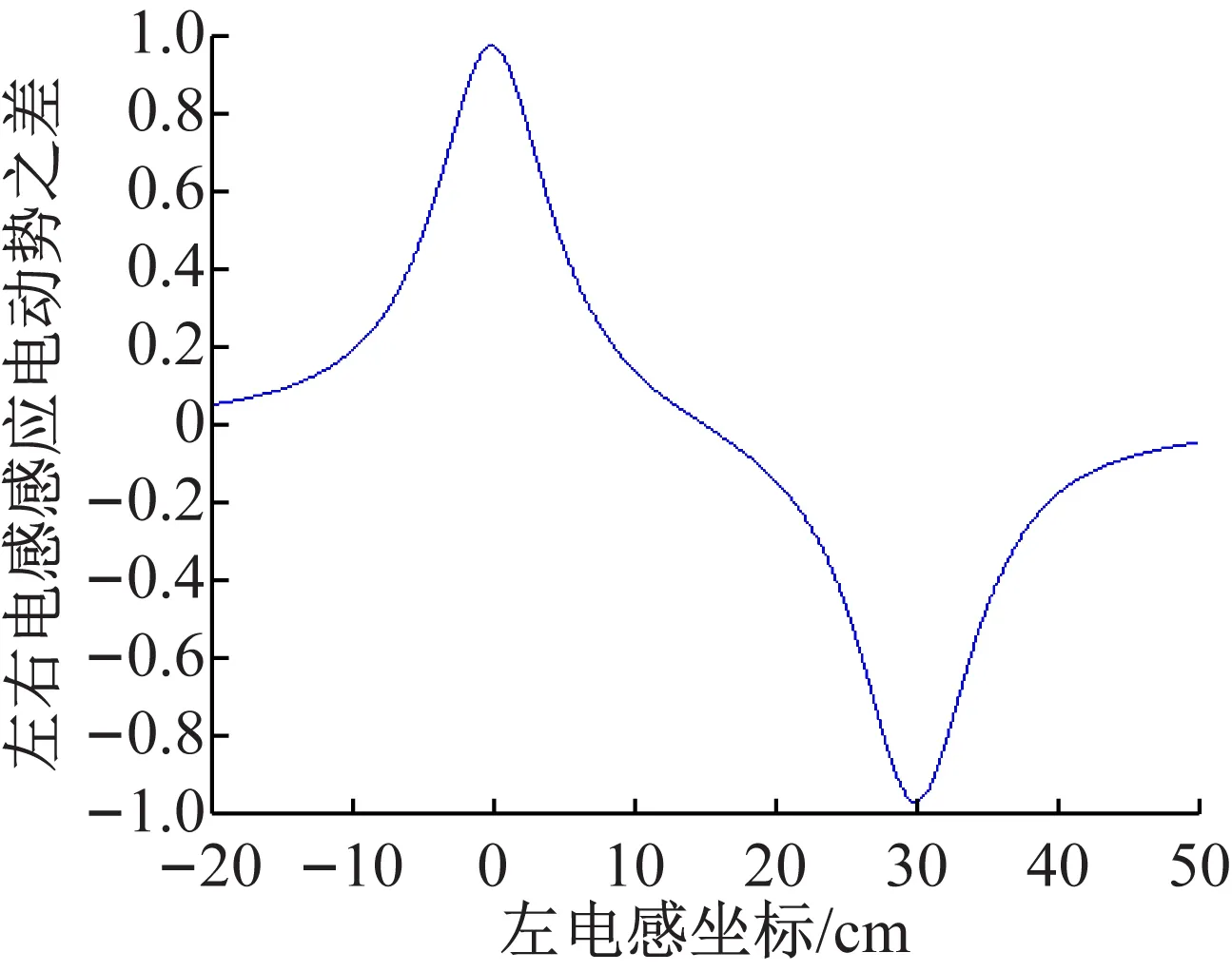
圖3 感應電動勢之差
定義左電感與右電感的感應電動勢之差比和為PID控制的偏移量
(4)
仿真得到的差比和值與左電感的坐標的函數圖像如圖4所示。當左電感的坐標為0~30 cm時,此區間幾乎是線性單調區間,更利于智能車的PID控制。差比和的算法可以消除感應電動勢之差發生大幅度的變化而造成的信號處理的不便。不足之處是單調區間仍是有限。
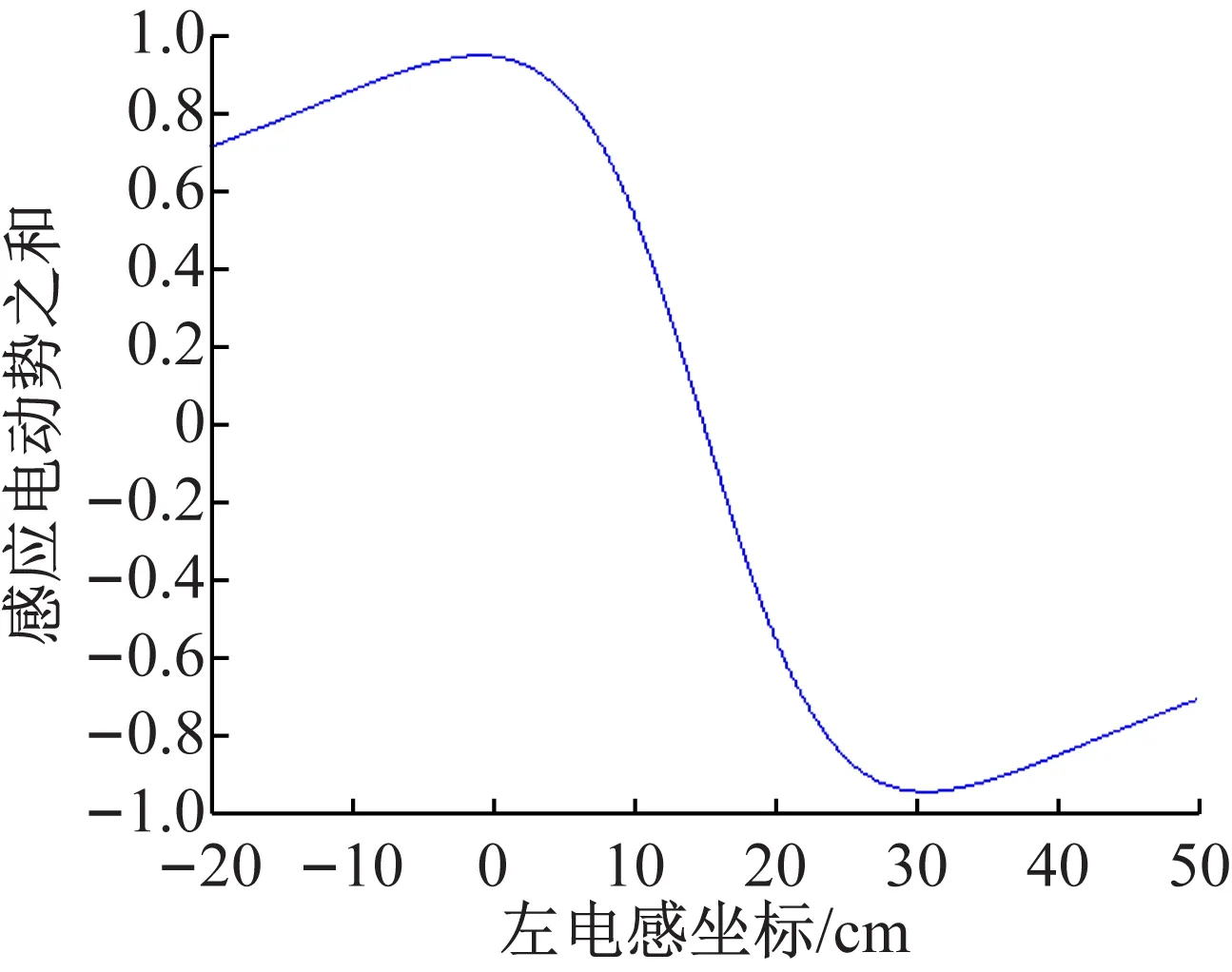
圖4 感應電動勢差比和
3 三電感方案
在雙電感之間再增加一個電感,如圖5所示。假設左右電感的距離L=30 cm,則電感A、B、C的坐標分別為x+15,x,x-15。
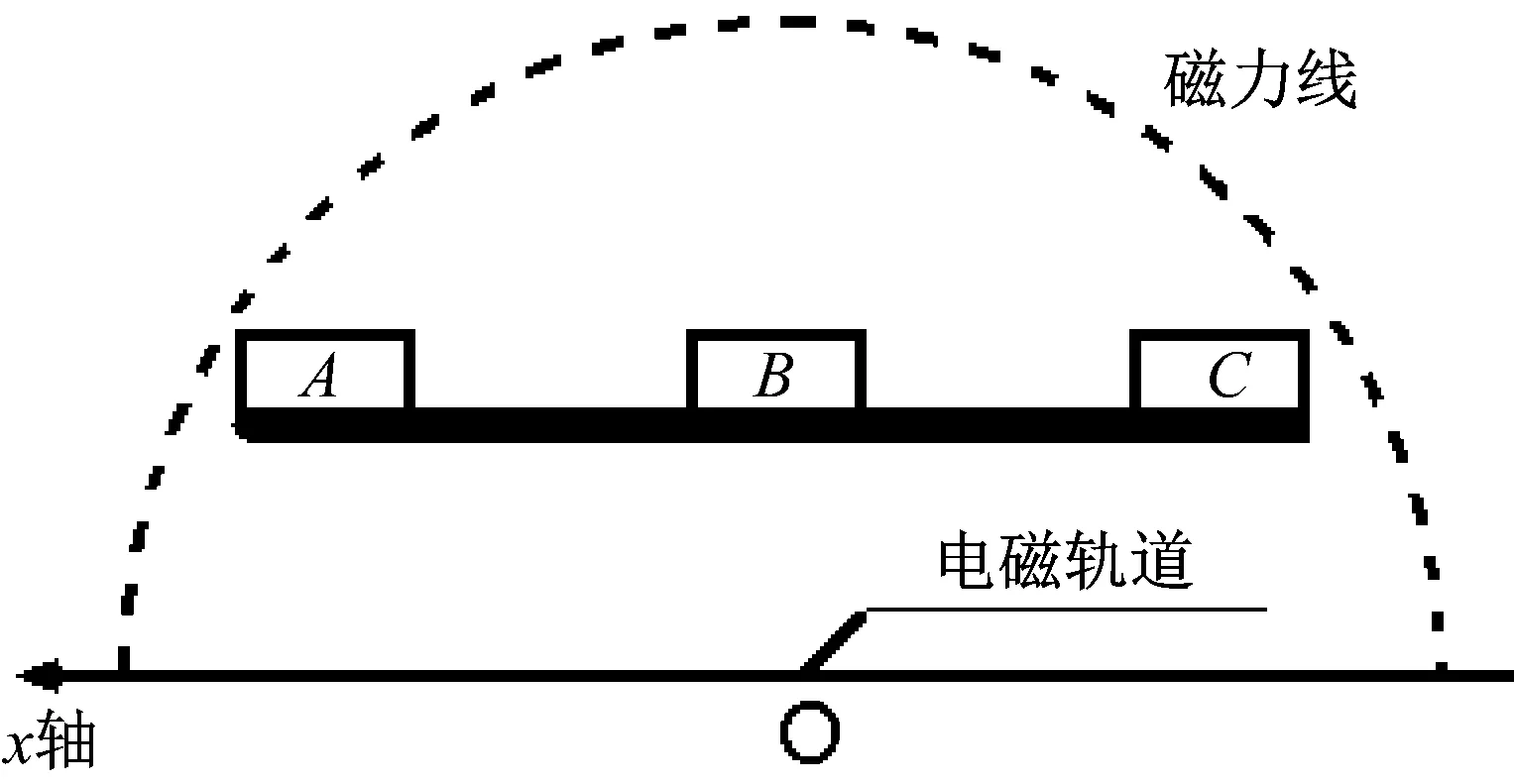
圖5 3電感排布
當智能車位于賽道正中央時,電感B位于導線正上方,記錄下此時中間電感的感應電動勢的值
(5)
由圖5可知,當電感B的坐標x為正時,電感A的感應電動勢小于C的感應電動勢,智能車在賽道偏左的位置;反之,當電感B的坐標x為負時,電感A的感應電動勢大于C的感應電動勢,智能車在賽道偏右的位置。因此,可以先比較左電感A與右電感C的感應電動勢的大小來判斷智能車的位置是在賽道偏左還是偏右的位置,然后用EM與電感B的感應電動勢EB做差比合算法,
(6)
將感應電動勢的式(2)及(5)式代入式(6)可得:
(7)
改進后的差比和e設置為PID算法的偏移量。如圖6所示,橫坐標電感B的坐標值x,縱坐標為電感B的感應電動勢差比和e。
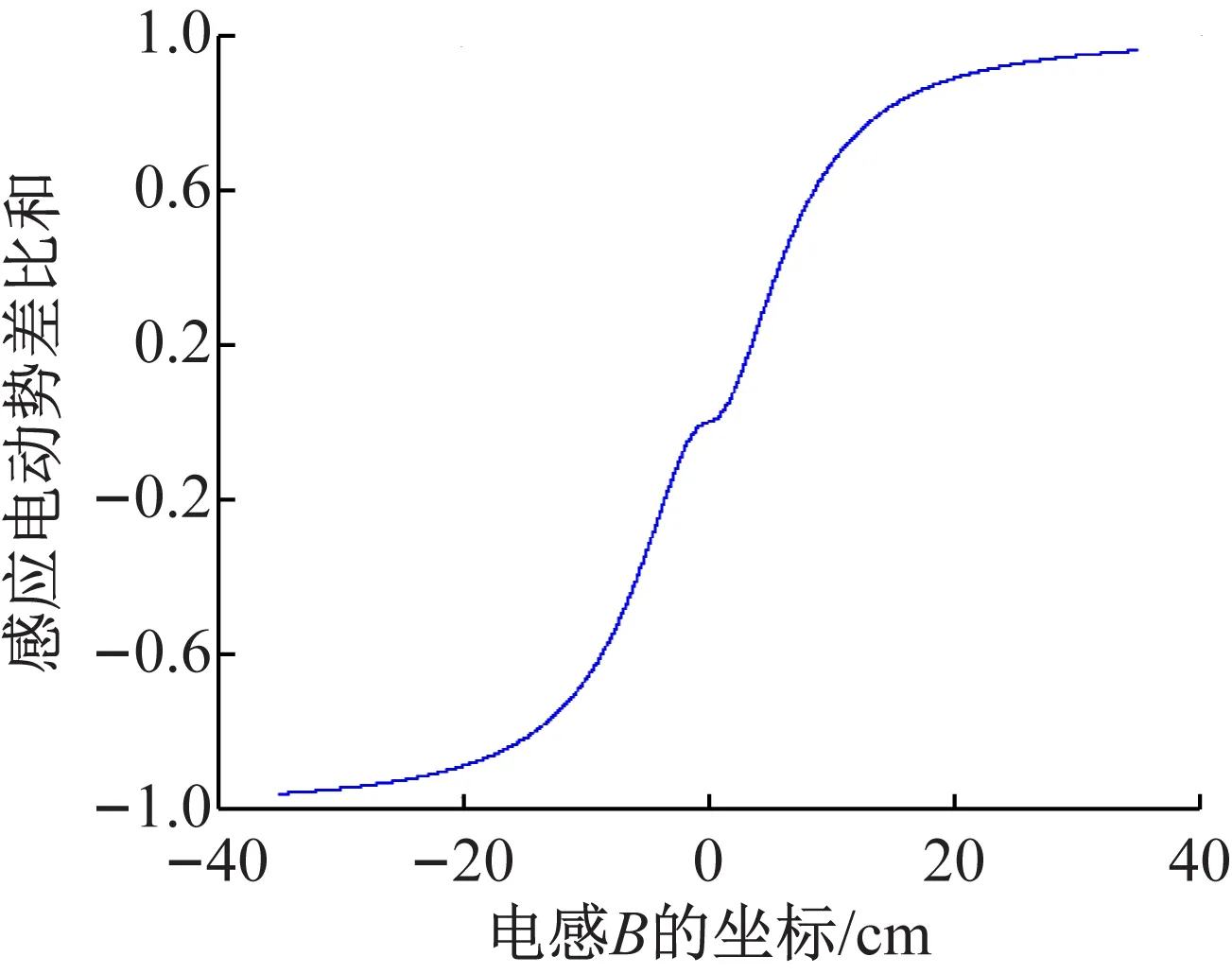
圖6 電感B感應電動勢差比和
由圖6可看出,3電感方案改進的算法可以徹底解決了雙電感檢測單調區間過窄的問題。經實際檢測該算法可以使智能車以3 m/s的速度流暢行駛。
4 結 語
傳統基于電磁傳感器的雙電感智能車循線算法存在檢測范圍不夠廣的弊端,原因是單調區間過窄受到限制。本文基于三電感方案提出的新算法徹底解決了PID控制智能車單調區間過窄的問題,理論上在整個實數空間范圍內單調。該算法處理數據簡單,新的算法使得智能車的穩定性和有可靠性都有明顯提升。
猜你喜歡
開放教育研究(2021年3期)2021-05-25 02:41:06
小學科學(學生版)(2020年12期)2021-01-08 09:28:04
裝備制造技術(2020年4期)2020-12-25 05:26:24
表面工程與再制造(2019年6期)2019-08-24 06:40:04
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
商周刊(2018年18期)2018-09-21 09:14:46
能源(2018年4期)2018-05-19 01:53:44
