基于LSTM的船舶航跡預測
2019-12-25 06:31:56
船海工程 2019年6期
(西安交通大學 現代設計及轉子軸承系統教育部重點實驗室,西安 710049)
關于船舶航跡預測,現有的方法有卡爾曼濾波算法、航跡插值方法、灰色模型、支持向量機、人工神經網絡等。相關的研究涉及建立船舶航行軌跡擬合曲線[1];根據船舶的航速、航向等信息采用卡爾曼濾波算法預測船舶的運動軌跡[2-3];將灰色模型運用到航跡預測當中,使用小波變換對軌跡數據降噪處理[4],該方法能夠及時修正帶有噪聲的航跡數據;提出組合預測模型,進行粗預測之后,用隱馬爾可夫模型對預測結果進行微調,取得了較高的預測精度[5];提出支持向量機回歸(SVR)航跡預測模型,并用AIS數據進行驗證,不足的是無法對船舶運動進行實時在線預測[6];使用BP神經網絡對船舶行為進行預測,取得了一定的預測效果[7-8]。但是傳統的BP神經網絡在使用歷史航跡數據訓練時并未體現先后時序,每次神經元權重的修正只是基于單個訓練樣本的局部調整,而船舶航行數據是典型的隨時間變化的量,每個樣本在時間軸上都有前后聯系,因此基于BP網絡的預測模型面對船舶復雜的軌跡態勢預測顯得捉襟見肘。長短期記憶網絡(long short-term memory,LSTM)在軌跡預測方面的研究已有成功安全[9-10],但該方法未考慮異常數據對預測精度的影響,預測準確率仍有提升空間。基于此,本文提出一種基于長短期記憶網絡的船舶航跡預測方法,運用插值的方法對航跡數據進行等時間間隔插補,綜合考慮船舶航速、航向、經緯度特征,實現船舶航跡的準確可靠的預測。
1 理論基礎
1.1 循環神經網絡(RNN)
一個簡單的RNN網絡包含了輸入層x、隱含層h、輸出層o3個部分。見式(1),RNN在任一時刻t,其隱含層輸出ht由該時刻的輸入xt和上一時刻隱含層的輸出ht-1共同決定,體現出RNN將時序信息考慮在網絡結構當中,以達到對時間序列建模的目的。
ht=f(U·xt+W·ht-1)
(1)
式中:f為隱含層激活函數,U、V和W分別代表輸入層到隱含層、隱含層到輸出層和隱含層之間的連接權值矩陣。
1.2 長短期記憶網絡(LSTM)
LSTM網絡是將RNN的隱含層單元替換為LSTM細胞,使其能夠避免梯度消失和梯度爆炸的問題,且具有長期記憶的能力。LSTM模型的隱含層結構見圖1。
LSTM網絡包含一組記憶模塊,取代了常規RNN中的隱含層單元。每個模塊包含一個或多個具有內部狀態的記憶細胞,如圖1最上方的水平線,表示細胞狀態,可以看做是記憶鏈條,細胞狀態會沿著整個鏈條傳送,只在少數地方有一些線性交互,因此使得LSTM可以記憶長期的信息。記憶模塊還包含3個用于控制信息流入、流出的門。LSTM計算過程如下。
1)記憶模塊中忘記門決定哪些信息需要從細胞中拋棄,表達式為
ft=σ(Wf·ht-1+Uf·xt+bf)
(2)
式中:xt為該時刻的輸入;ht-1為上一時刻隱含層的輸出;ft為忘記門的輸出;Wf、Uf、bf分別為忘記門的權值項和偏置項;σ為sigmoid激活函數。
2)輸入門(input gate)決定什么樣的信息應該被存儲,這個過程主要分為兩步,第一步sigmoid層決定哪些值需要被更新。
it=σ(Wi·ht-1+Ui·xt+bi)
(3)

(4)
式中:Wc、Uc、bc分別為權值項和偏置項,為雙曲正切激活函數。
3)將忘記門和輸入門輸出的兩個值結合起來并更新細胞狀態Ct。
(5)
4)最后輸出門基于新的細胞狀態確定輸出的內容。
Ot=σ(Wo·ht-1+Uo·xt+bo)
(6)
ht=Ot×tanh(Ct)
(7)
式中:ht表示該時刻隱含層輸出。
LSTM網絡訓練采用基于時間的反向傳播算法 (back propagation trough time,BPTT),其基本原理與經典的誤差反傳算法(back propagation,BP)相似,均包含正向傳播和反向傳播的過程。
2 模型建立
2.1 模型結構
為了深入挖掘船舶歷史航行數據,以船舶航向、航速和經度、緯度作為LSTM網絡的輸入,充分利用與船舶位置聯系最緊密的航行信息,構造實時航跡預測模型,模型結構見圖2。

圖2 航跡預測模型結構示意
對于目標船舶,其在t時刻的航行狀態特征可以表示為
S(t)={λt,φt,vt,αt}
(8)
式中:λt、φt、vt、αt分別代表船舶在t時刻的經度、緯度、速度和航向。考慮到模型實時性要求,保證網絡的預測輸出能夠確定船舶位置即可,不需要預測的船舶速度和航向信息,以減少模型計算量。綜上,采用船舶的t時刻及其前n-1個時刻的經度、緯度、航速、航向作為LSTM網絡的輸入,t+1時刻船舶的經緯度坐標作為輸出,建立LSTM航跡預測模型,則t+1時刻船舶位置可以表示為
L(t+1)=g(S(t),S(t-1),…,S(t-n+1))
(9)
式中:L(t+1)=(λt+1,φt+1),g表示所訓練的模型。
2.2 數據分析
2.2.1 數據來源
船舶自動識別系統(automatic identification system,AIS)數據中蘊含著豐富的船舶信息,裝有AIS的船舶能夠將其自身的經緯度坐標、航速、航向等動態信息以及MMSI、船長、船名等靜態信息周期地向附近水域船舶及岸基廣播[11]。因此,將船舶AIS信息作為數據來源。
2.2.2 AIS數據修復
實際的AIS數據中包含大量的錯誤數據[12],此外,航跡數據采樣間隔一般不相等,限制了模型的應用。本文所用到的AIS數據主要為動態信息,因此要對船舶經緯度、航速、航向等數據進行修復。
1)異常值剔除。使用分箱的方式,將數據分到一系列等寬的“箱”中,若一個數據點在某一屬性上的值,位于“箱”中所有數據點在這一屬性上統計平均值的3倍標準差之外,就認為這個點是異常值點,需要被剔除。
2)時間對齊。針對1)中剔除的異常值需要用合理的值來替代以及AIS數據本身就存在的缺失值,使用三次樣條插值的方法對其修復,以獲得時間間隔相等的航跡數據。選取缺失數據點t前后相鄰兩點,提取他們的時間ti、ti+1,船舶位置為(λi,φi)、(λi+1,φi+1)。對于在ti、ti+1之間的t時刻的船舶經度數據可以用式(10)計算。
(10)
式中:hi=xi-xi-1;Mi為插值函數λ(t)在節點ti處的二階導數值。同理可以計算出插值點t時的船舶緯度、速度、航向等數據。在真實航跡上人為添加一些異常值,并用所述方法修復,仿真航跡修復結果見圖3,可以看出,插值得到的數據點能夠準確反映船舶航跡的真實情況。
3 實驗分析
3.1 實驗數據
選取渤海水域煙臺到大連段某船真實航行的AIS數據作為原始樣本,按照時間順序將其前4/5劃分為訓練集,后1/5用于測試訓練好的LSTM模型,原始數據經修復之后用于網絡訓練和測試。
3.2 模型訓練與預測
航跡預測流程見圖4。

圖4 模型預測流程
1)AIS數據預處理。由于AIS數據在不同船速下傳輸時間間隔不等,使用前述方法對原始AIS數據進行修復之后,使用三次樣條插值對船舶航行數據進行插值,獲得時間間隔為10 s的等間隔數據。使用min-max標準化方法對數據進行歸一化處理。
(11)
式中:1≤i≤n,1≤j≤n,max{xj}為樣本數據的最大值,min{xj}為樣本數據的最小值,轉換后的數據均在[0,1]內,避免因輸入數據間量級差別較大對LSTM網絡模型影響。
2)模型參數初始化。使用Xavier方法對網絡權值初始化,使用網格搜索的方法對LSTM網絡時間步、隱含層節點、學習率、批大小等參數進行尋優。網絡參數選擇如下:輸入層節點為4,隱含層節點為100,輸出層節點為2,設置初始學習率為0.001,批大小為20。
3)模型訓練。LSTM網絡的輸入考慮了時間順序,在考慮連續多個時刻的船舶信息時不再是將多個時刻的向量拼接成一個向量,而是增加了一階時間步,輸入數據的格式為矩陣形式。訓練樣本表示為
{xt:[S(t),S(t-1),…,S(t-n+1)],
Yt:L(t+1)}
(12)
式中:n為時間步長,使用adam優化算法對網絡權值進行更新,根據設置的誤差率確定網絡最終的權值。
4)模型預測。訓練完成后,將測試樣本輸入到模型中進行預測,同時還要對預測的結果反歸一化,使得預測得到的航跡數據具有真實的物理意義。
3.3 實驗結果
為了驗證方法的可行性與可靠性,選取船舶直行和轉向兩種情況下各200組連續數據進行實驗,數據時間間隔為10 s,前4/5數據用于網絡訓練,后1/5數據用于預測。
3.3.1 不同時間步長對實驗結果的影響
時間步長即連續n個時刻的船舶航跡數據輸入,直接影響航跡預測的準確性,為了選擇合適的時間步長,保證網絡其他參數不變,改變時間步長,對比不同時間步長下的預測結果,見圖5。
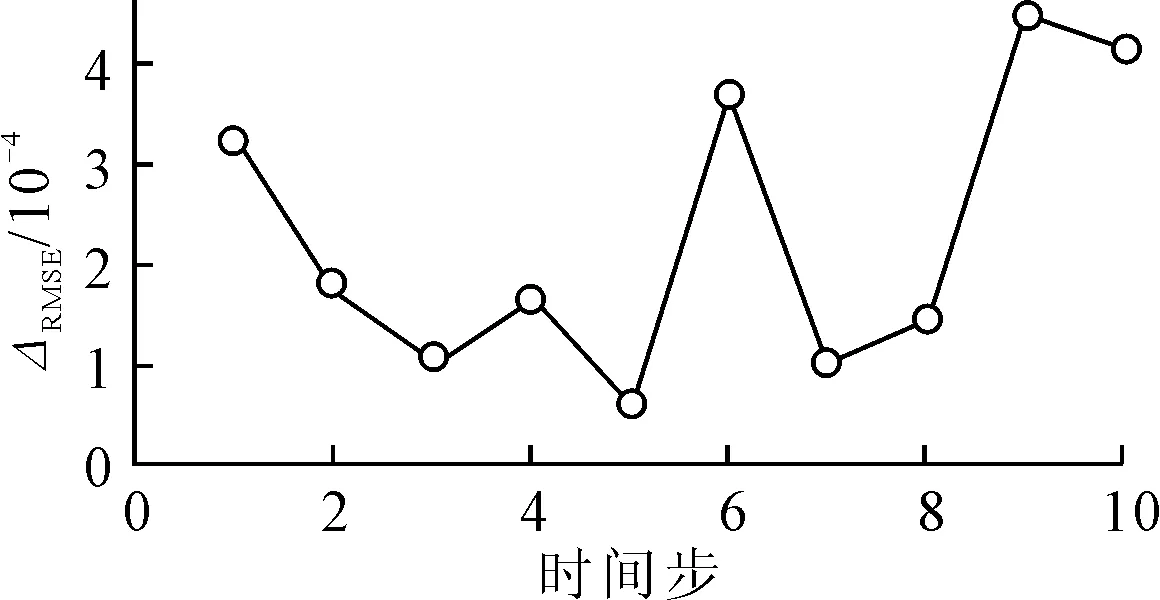
圖5 不同時間步預測誤差結果
使用均方根誤差ΔRMSE作為誤差評價指標,越低則表明誤差越小,其數學表達式為
(13)
式中:m表示樣本數量。隨著時間步長增大,網絡預測誤差逐漸呈下降趨勢,當時間步過長時,輸入的前后關聯性減小造成網絡的預測誤差增加,并經實驗驗證在時間步等于5時的ΔRMSE最小。
3.3.2 船舶實時航跡預測結果對比
航行預測結果及誤差分析見圖6、7。

圖6 直行預測結果

圖7 轉向預測結果
圖6a)和7a)中空心坐標點為真實航跡,實心點為預測數據,可以看出預測的航跡可以較好地反映出訓練集船舶的航行趨勢,且預測航跡與真實航跡吻合較好。
由圖6b)、c)和7b)、c)可以看出,兩種情況下的經緯度預測最大誤差不超過5×10-4°,表明該模型具有一定的預測精度,可以滿足監控中心對船舶進行監控和管理的需求。
3.3.3 輸入對模型預測精度的影響
為了分析航速v、航向α作為輸入對預測精度的影響,將網絡的輸入改為僅包含船舶的經緯度坐標,使用轉向情況下的航跡數據進行驗證,實驗結果見表1。
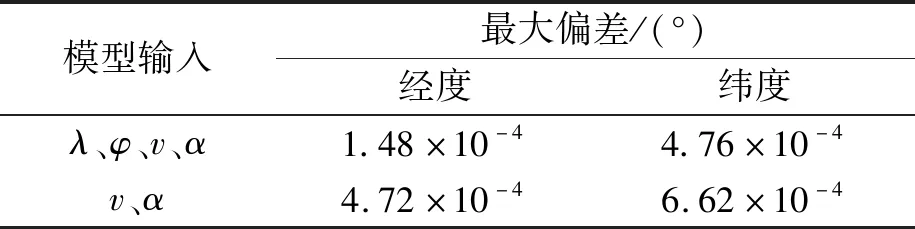
表1 輸入對預測精度的影響對比
可以看出,含航速、航向的預測模型相對于僅有經緯度輸入的情況,對船舶的航跡的預測誤差大大減小,預測精度也相對提高。
3.3.4 不同模型預測精度對比
選擇灰色預測GM(1,1)模型和BP神經網絡與所提方法進行對比實驗。其中GM(1,1)模型灰發展系數取0.5,單一使用經度和緯度進行訓練和預測;BP網絡的層數設置為四層,輸入層、隱含層1、隱含層2、輸出層維數分別為4、50、10、2,同樣使用經度、緯度、航速和航向作為網絡輸入,經緯度作為輸出,實驗結果見圖8。可以看出本文方法相較于灰色預測模型和BP網絡有著更高的預測精度。
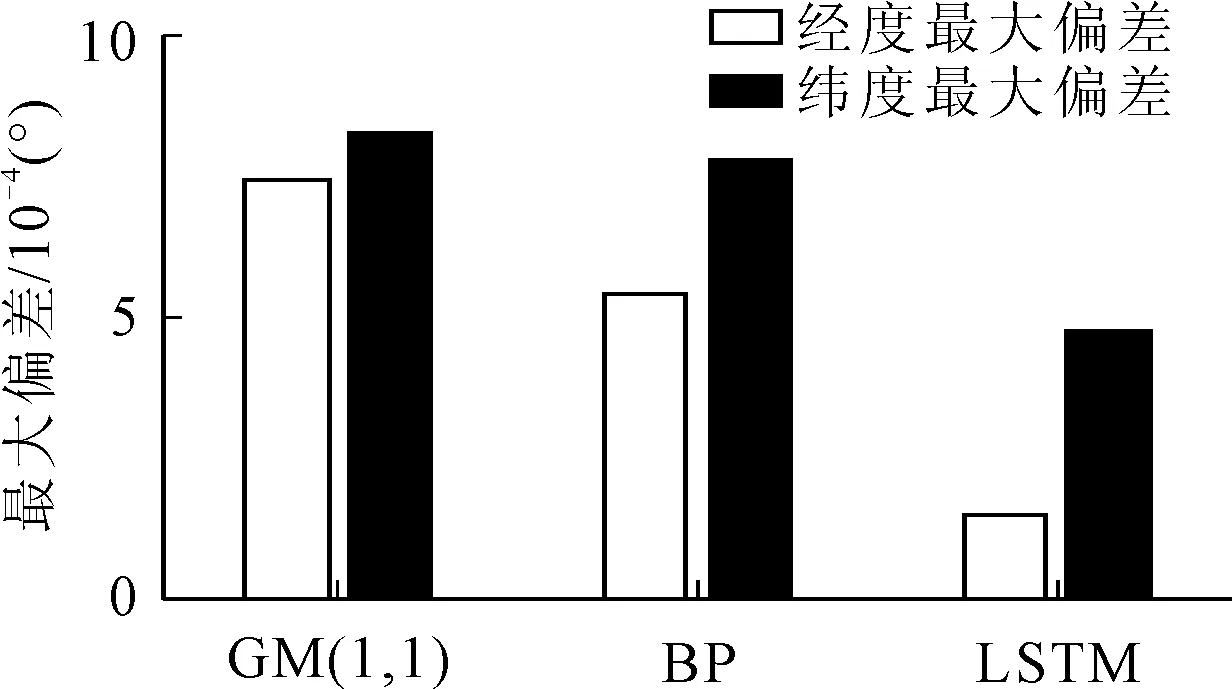
圖8 不同模型預測結果對比
4 結論
相較于傳統方法,基于LSTM網絡的航跡預測模型具有更高的精度;利用三次樣條插值可以將不等間隔的航跡數據處理成整周期采樣,可有效避免不等間隔數據對模型的限制,能夠快速準確地預測船舶航跡。未來的研究應考慮模型的在線更新和實時預測,以進一步提高模型的航跡預測能力。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學技術(2022年14期)2022-09-22 03:07:40
艦船科學技術(2022年2期)2022-03-29 01:12:44
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
中國船檢(2017年3期)2017-05-18 11:33:09
光學精密工程(2016年6期)2016-11-07 09:07:19
核科學與工程(2015年4期)2015-09-26 11:59:03
