超短基線定位系統在沉管測控中的應用
2019-12-25 06:12:52趙心1喻敏丁賢君
船海工程 2019年6期
趙心1,喻敏,丁賢君
(1.中國船舶工業系統工程研究院,北京 100036;2.武漢理工大學 交通學院,武漢 430063)
隨著水上交通的發展,單一的沉管定位方法已經很難滿足施工的需求,隨著沉管的施工環境向遠岸、深水發展,將多種定位方法[1-2]進行組合,集合成綜合定位系統已成為現代沉管隧道沉放定位技術的主流[3-4]。其中,將水聲定位技術與廣域差分GPS定位技術相結合,可獲取沉管的大地坐標,且受環境因素影響較小,無需安裝測量塔,已成為解決深水沉管隧道管節沉放的有效途徑。
提出將沉管沉放定位分為兩個階段:粗測階段及精測階段。在粗測階段,將超短基線(USBL)聲學定位系統與GPS組合,對下沉階段的管節位姿進行實時測量,引導待沉管節沉放至預定位置,省去測量塔的安裝,提高施工深度;在精測階段,由精測定位系統(如超聲波定位[5],機械定位[6])完成沉管最終對接。本文重點圍繞粗測階段,詳細給出基于水聲定位系統和GPS定位系統的沉管定位方案。
1 沉管定位方案
1.1 方案布置
針對待沉管道下沉施工階段,提出基于超短基線定位系統對待沉管節姿態進行實時測控。安裝在施工平臺(如駁船)舷側的超短基線系統以聲波作為載體,對固定在待沉管節表面的應答器進行定位。駁船上安裝有GPS天線以及姿態傳感器,用于將超短基線坐標系下的定位信息轉換到大地坐標中。因此,需要建立3個坐標系:以GPS天線為原點的大地坐標系、以駁船重心為原點的船心坐標系和以超短基線基陣中心為原點的基陣坐標系,通過姿態傳感器測量的船姿態信息及GPS天線的大地坐標,根據歐拉旋轉矩陣對3個坐標系進行轉換,最終可獲取待沉沉管在大地坐標系中的位姿信息。見圖1。

圖1 基于USBL定位系統的沉管定位方案
從管節下沉開始,位于沉管上表面的應答器便不間斷地發射預置脈沖信號,基陣持續接收脈沖信號。超短基線系統根據基陣陣元間的相位差解算出應答器在基陣坐標系中的位置,并通過位姿解算方法獲得沉管的位姿信息。然后通過坐標轉換獲取沉管在大地坐標系中的絕對位姿信息。最終,顯示器實時顯示沉管在大地坐標系中的三維位姿,對現場施工進行連續監控。
1.2 位姿解算
已知應答器安裝在待沉管節上,且待沉管節上的應答器在一個平面上,即可根據三點共面條件,通過求解應答器坐標獲取待沉管節平面上的3個點,繼而求出待沉管節平面在基陣坐標系中的姿態信息。
設待沉管節平面的平面方程為
Ax+By+Cz=1
(1)
式中A、B、C為未知參數,至少需要3個不共線的坐標,可解出A、B、C。之后,可通過平面的法線式方程得到待沉管節平面在基陣坐標系中的法向矢量,即待沉管節平面的方向余弦向量。
(2)
(3)
設USBL基陣所在的平面為XOY,則基陣平面的法向量就可表示為IU=[0,0,1]′,則從管節平面法向量到USBL基陣平面法向量的旋轉矩陣可表示為
(4)
設從USBL平面到待沉管節平面的繞基陣坐標軸旋轉的歐拉角為θx、θy、θz,則R是關于θx、θy、θz的旋轉矩陣,根據旋轉矩陣R即可以求出待沉管節平面的姿態角度。
1.3 多址定位技術
由位姿解算方法可知,對沉管定位過程中需要對多個應答器(≥3)進行定位,因此涉及水下多址定位技術,即每個應答器通過發射不同形式的脈沖信號,超短基線系統根據接收到的脈沖信號來分辨不同的應答器,并確定每個應答器在基陣坐標系下的坐標。由于自身具有調節參數的能力以及對信號和噪聲的先驗知識要求少,且在高信噪比下,Notch濾波器有著良好的相位差估計能力,可以作為超短基線系統多址信號檢測器及相位差估計器。
首先根據應答器的個數來設計可用帶寬,Notch的每路參考信號的頻率分別對應應答器的中心頻率。假設需要安裝3個應答器,則其對應的3路并聯Notch濾波器的結構圖見圖2。

圖2 3路并聯的Notch濾波器
對每一個應答器,X(t)為基陣接收的信號。
X(t)=Bcos(ω0t-φ)+n(t)
(5)
式中:n(t)為背景噪聲。
ri(t)為兩路正交的參考信號,y(t)為參考信號正交信號的內積,ε(t)為接收信號與參考信號內積的誤差。對參考信號的頻率已知,分別對應單個應答器發射信號的中心頻率。
rs(i)(t)=Asinωit
rc(i)(t)=Acosωit
(6)
式中:A為參考信號的幅值,下標i代表應答器的身份編號,i=1、2、3。
基陣接收的每一路信號都要通過3路并聯的Notch濾波器,選擇合適的自適應算法,通過濾波器的輸出結果就可以檢測出發送該信號所對應的應答器。然后通過相位差估計器解算出該信號在基陣相鄰陣元間的相位差。
(7)
式中:下標i代表應答器的身份;m、n代表基陣中相鄰的陣元。
2 仿真計算
通過仿真計算來驗證USBL對應答器進行定位解算待沉管節平面位姿的有效性。仿真中,USBL定位系統測時誤差取值為0.1 ms,定位精度誤差取值為0.1%斜距。待沉管節上安裝有3個不共線的應答器,組成一個直角三角形,管節平面相對于USBL基陣坐標的歐拉旋轉角度設置為θx=5°,θy=10°,θz=15°。
通過上述位姿解算方法,求解出待沉管節平面相對于USBL基陣的歐拉角:θx=4.95°,θy=10.04°,其中繞Z軸的歐拉角出現無解狀態,這是由于方向余弦矩陣有9個分量,實際只有3個自由度,假設歐拉角為未知量,通過法向量直接求解方向余弦矩陣,則使得矩陣為非滿秩陣,從而出現繞Z軸歐拉角度無解的狀態。為此,配合應答器初始位置,并通過已解算出來的θx、θy值,再解算繞Z軸的歐拉角,最終得到管節平面繞Z軸旋轉的歐拉角。仿真求解的歐拉角均值:θx=5.001 4°,θy=10.038°,θz=15.78°,計算誤差:Δθx=0.01°,Δθy=0.02°,Δθz=0.03°。見圖3。

圖3 管節平面位姿角度仿真計算結果(基陣坐標系)
2.1 姿態角估計精度
管節姿態角估計精度與超短基線定位精度有直接關系,因此仿真驗算了定位精度和姿態角估計精度之間的關系。仿真步驟:沉管在大地坐標系下的歐拉角精確值為[5° 10° 15°],改變超短基線定位系統的定位精度,求姿態角的誤差。以繞X軸姿態角誤差為例,結果見表1。
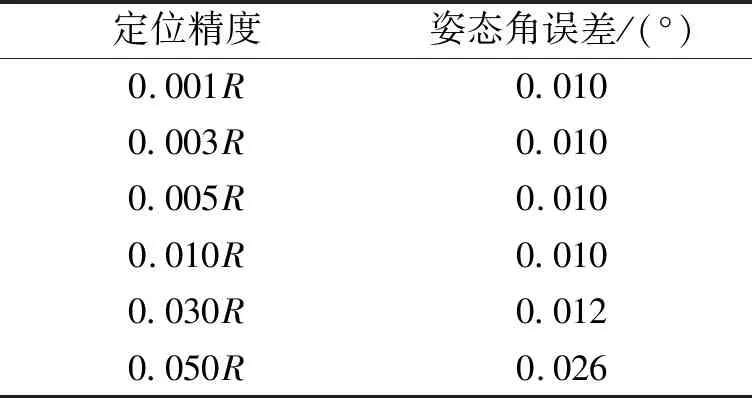
表1 USBL定位精度與繞X軸歐拉角的關系
表1中R為基陣坐標系原點到局部坐標系原點的斜距。由表1可見,超短基線定位精度由0.050R增加到0.001R時,回收平臺姿態角度誤差也就越來越小。在水文環境較好的背景下,基于Notch濾波器的超短基線定位系統的精度高于0.010R時,此時姿態角誤差達到了0.010°,可以滿足工程需要。
2.2 沉管表面應答器個數
理論上3個應答器即可決定沉管的定位面,且應答器個數越多,冗余信息量增加,參數估計的精度有相應提高。但應答器個數太多,會增加成本和計算復雜度。為了研究應答器個數和姿態角估計精度之間的關系,進行了如下仿真計算:改變應答器的個數,對每個應答器的位置進行解算。每增加一個應答器,就利用新的冗余信息對前一次計算的歐拉角進行修正,求解管節平面的姿態角(以繞X軸歐拉角為例),見圖4。

圖4 管節平面安裝應答器個數與姿態角度(繞X軸)誤差的關系
圖4表明,當應答器個數從3增至1 000個,姿態角估計精度也逐漸提高。但精度的提高僅在極小的量級,最高不超過0.020°,不符合工程實際。并且由仿真可知,當定位精度高于0.010R時,安裝3個應答器的角度估計誤差便小于0.010°。
2.3 應答器的布放
除應答器個數,還需考慮應答器布放位置和姿態角估計精度之間的關系。根據幾何關系,不共線3點能決定一個平面,因此只需要3個應答器位置不在一條直線上,理論上都是可以解出唯一平面。為了研究應答器布放位置和姿態角估計精度之間的關系,進行了如下仿真計算。仿真步驟:改變應答器的布放位置,采用三種構成形狀,計算歐拉角估計誤差,見表2。

表2 應答器構成形狀與姿態角估計的關系 (°)
由表2可見,應答器的布放形式對姿態估計精度沒有影響。這一結論使得應答器在沉管上的安裝變得更為方便,可以根據施工要求靈活選取,避開高噪聲區。同時,可將應答器安裝在USBL定位精度較高的基陣正下方,有助于提高位姿算法的精度。
3 結論
相比于單一的傳統沉管下沉測控方法,本文提出基于USBL定位系統的管節沉放測控方案,在管節下沉階段可輔助待沉管節較為精確地布放到待沉區域(粗測階段),而后結合高精度相對法完成最終的對接定位過程(精測階段)。該方案的優勢如下。
1)滿足遠岸、深水的沉管施工要求。超短基線聲學定位系統不依靠岸基上的輔助設施,擺脫了離岸距離的限制。同時,與傳統定位方法相比,在深水區依然滿足施工精度。與GPS系統結合后,可以實時顯示沉管在大地坐標中的三維姿態參數,可有效輔助遠岸、深水環境下的沉管水下沉放施工。
2)設備成本低,安裝方便,作業安全性高。超短基線聲學定位系統體積小、成本低廉。作業前只需要在沉管上表面按需求安裝3個應答器,無需安裝測量塔,安裝過程在水面進行,可減少施工人員下水作業次數。整個施工過程效率高、安全性高、操作復雜性低。
