并聯式六維加速度傳感器的故障自診斷、自修復算法*
2019-12-24 09:09:16王林康尤晶晶葉鵬達符周舟
傳感器與微系統 2019年12期
王林康, 尤晶晶,2, 仇 鑫, 葉鵬達, 符周舟
(1.南京林業大學 機械電子工程學院,江蘇 南京210037;2.江蘇省精密與微細制造技術重點實驗室,江蘇 南京210016;3.南京林業大學 汽車與交通工程學院,江蘇 南京 210037)
0 引 言
由于機械振動信號中包含了大量機械狀態信息,越來越多的研究人員通過提取振動信號獲取所研究的測量信息[1],六維加速度傳感器這類振動檢測器件是進行載體振動信號特征提取的有效裝置[2]。除此之外,在機器人、航空航天、自動化控制等領域,六維加速度傳感器也具有廣泛的應用前景[3~5]。
目前,六維加速度傳感器還處于理論研究階段。Sun Z B等人[6]提出一種基于6—6 Stewart并聯機構的六維加速度傳感器,具有尺寸效應誤差小、靈敏度高的優點,但存在量程小、各向同性差等缺陷。Zou T等人[7]基于8個線加速度計,提出一種新的空間幾何構型,具有尺寸小、可靠性高、集成度高的優點,然而,多個加速度計安裝位置、方向的安裝精度要求較高,因此,其工程實現比較困難。尤晶晶等人[8]提出一種Stewart衍生型并聯機構,并將其充當六維加速度傳感器的彈性體,對傳感器解耦算法進行了詳細研究。六維加速度傳感器在復雜、未知的工作環境中很可能會遇到若干條支鏈出現故障的情況。比如,信號濾波處理不徹底、偏置電流或電壓引起的偏置故障、電源干擾引起的沖擊故障、線路斷裂引起的開路故障等等,這會給信息獲取、系統檢測等帶來嚴重影響,甚至造成不可估量的損失[9]。
目前對一維傳感器故障診斷的研究較多,楊里平等人[10]通過分析壓電傳感器多種故障的發生原因、故障現象或故障信號分析特征、故障處理方案等經驗知識,運用專家系統工具建立了一種壓電加速度傳感器在線故障的智能化診斷方法。龍志強等人[11]提出將冗余的間隙傳感器微分信號與加速度積分信號進行比較,采用貝葉斯決策理論為比較結果設計閾值以判斷是否發生故障。然而,相對于一維傳感器,六維傳感器的輸入輸出量較多,且強非線性耦合,其系統更復雜,故障處理難度更大。Li C G等人[12]利用陀螺儀的輸出結合六維加速度傳感器自身的特性建立了故障修復模型,傳感器輸入量間的相互約束關系變多,提高了修復率,但也增加了機械系統的復雜性。姚建濤等人[13]基于螺旋理論和變形協調關系,分別建立傳感器無故障、信號故障時的數學模型,進而揭示其容錯測量機理,但是其分析的支鏈個數較少,僅7個支鏈。
基于以上分析,本文以文獻[8]提出的并聯式六維加速度傳感器為研究對象,提出一種基于傳感器自身冗余輸出信息的故障處理算法。以尺度約束為基礎,推導傳感器的力協調方程;提出協調閉鏈的概念。統計傳感器的診斷組,基于此定義傳感器的自診斷、自修復算法。樣機試驗結果驗證了算法的可行性。本文的結果可為其他樣式多維傳感器(如六維力傳感器、三維力傳感器和三維加速度傳感器)的故障處理提供參考。
1 結構模型與力協調方程
并聯式六維加速度傳感器的結構模型如圖1所示,該結構中支鏈的一端固聯于質量塊棱邊的中點,另一端與外殼上的副板相連。在實際工作時,外殼剛性固定在待測載體上,在慣性力的作用下,質量塊會拉伸或壓縮支鏈,由于正壓電效應,此時串聯在12條支鏈上的壓電陶瓷會產生電荷,且電荷量的大小與待測加速度密切相關[12]。

圖1 并聯式六維加速度傳感器的結構模型
考慮到壓電陶瓷質量輕、剛度大,且其兩端連接球鉸鏈,12條支鏈可近似視為無變形的二力桿。這樣,作用在質量塊上的外力包括支鏈的軸向力fi(i為支鏈序號)和自身的重力mgn,如圖2所示。其中,m為質量塊的質量,gn為測量當地的重力加速度。由于12根支鏈上的壓電陶瓷具有相同的尺寸形狀和材料,所以可以將12根支鏈的剛度近似視為相等。
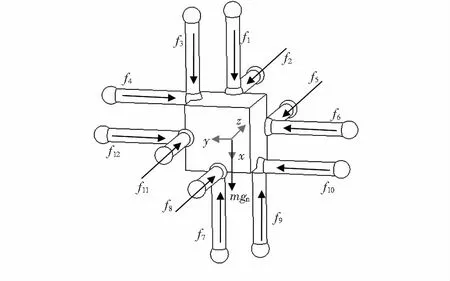
圖2 慣性質量塊的受力情況
文獻[14]從尺度約束角度出發,挖掘出并聯式六維加速度傳感器彈性體拓撲構型中的變形協調條件,表現為復合鉸鏈中心之間的幾何距離始終不變。基于這種方法,運用Hooke定律,可以推導出式(1)~式(6)所示傳感器的6個力協調方程
A=f1-f3-f7+f9-L1
(1)
B=f4+f6-f10-f12-L2
(2)
C=f2-f5-f8+f11-L3
(3)
D=f5+f6+f11+f12-L4
(4)
E=f1+f2+f7+f8-L5
(5)
F=f3+f4+f9+f10-L6
(6)
式中L1=1-3-7+9,L2=4+6-10-12,L3=2-5-8+11,L4=5+6+11+12,L5=1+2+7+8,L6=3+4+9+10,i為第i條支鏈的預緊力。傳感器正常工作時,A~F均為零。
力協調方程代表的是傳感器各個支鏈之間的固有約束關系。傳感器預緊后,L1~L6是不隨支鏈的軸向力fi變化的固定值,可以在傳感器靜止時測量獲得。
通過觀察力協調方程可以看出每一個支鏈的輸出信號出現了兩次,通過聯立力協調方程能夠消去支鏈的輸出信號,并且,6個力協調方程之間為協調閉鏈關系,如圖3所示。
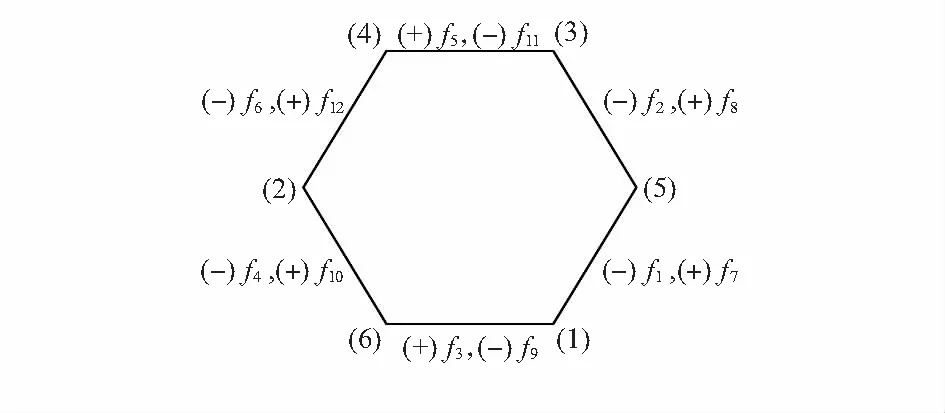
圖3 協調閉鏈
圖3中,(1)~(6)為力協調方程,f1~f12為相鄰力協調方程之間共有支鏈的輸出信號。輸出信號前的‘(+)’、‘(-)’意義是通過將相鄰力協調方程進行‘加’或‘減’的運算可以消去此輸出信號,本文將其稱為“消去原則”。例如(3)加(4)消去f5。
2 故障處理過程
本文涉及到與故障處理相關的概念分別是“故障自診斷”和“故障自修復”。其中,“故障自診斷”是診斷傳感器是否存在故障,并計算出故障支鏈序號的操作;“故障自修復”是確定了故障支鏈的序號后,對故障進行處理更正,從而使系統可以恢復正常工作的操作。
2.1 故障自診斷模型
由于每個支鏈輸出信號均存在于兩個力協調方程中,因此,傳感器故障至少會導致2個力協調方程不成立。如果多個不成立的力協調方程在協調閉鏈上是相鄰的,就可以通過聯立多個力協調方程,利用相鄰力協調方程之間的消去原則診斷出故障支鏈。
傳感器支鏈故障時,統計不成立的力協調方程情況,并將其記為診斷組H,如表1所示,其元素Hij是由A~F組成的行向量,i,j分別為該元素所在診斷組的行數和列數,A~F對應式(1)~式(6)。例如,H53是診斷組的第5行、第3列的元素(ACDE)。
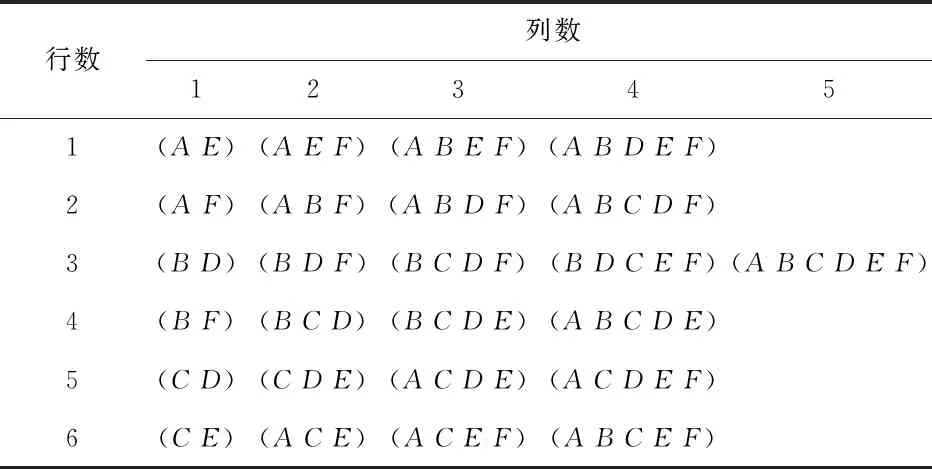
表1 診斷組
診斷組元素Hij中力協調方程的不同組合計算可以診斷不同的支鏈。為了實現Hij中力協調方程的多種組合計算,引入不同符號矩陣,符號矩陣Mi由“±1”組成

(7)
(8)
(9)

(10)
通過診斷組與符號矩陣的結合可以得到協調方程的不同組合計算,將力協調方程的組合計算結果記為S
S=HijMj,
i=1,2,…,6;j=1,2,3,4
(11)
式中S為以Hij中力協調方程不同組合計算結果為元素的向量。
由于Hij中力協調方程均包含故障支鏈,因此,若S中元素為零,則表明此元素對應的組合計算結果中不包含故障支鏈,即消去的支鏈為故障支鏈。故障診斷流程如圖4中虛線部分所示。
不失一般性的,舉例如下:假設支鏈1,2,5故障。通過故障自診斷算法,進行故障診斷,力協調方程中方程(1)、方程(3)、方程(4)、方程(5)不成立,找到診斷組為H53(A,C,D,E)。H53中元素的組合計算結果為S=H53M3,S中的元素為A,C,D,E的8種組合計算結果,且第二個元素為零,則此元素消去的支鏈1、2、5為故障支鏈。
2.2 故障自修復模型
在經過式(12)計算得出故障支鏈后,利用傳感器自身的冗余信息進行自修復。算法主要步驟為用固定值Li和無故障的支鏈信息逐步代替錯誤的支鏈信息,以達到故障自修復的目的。以可修復情況:1,2,5支鏈故障舉例,介紹故障自修復模型。當支鏈1,2,5的壓電陶瓷輸出信號同時出現錯誤時,式(1),式(3)、式(4)、式(5)不成立,可以用固定值L1,L3,L4,L5與方程中的無故障信息計算出f1,f2,f5
(12)
式中f1等號右邊第一個式子和f5等號右邊第二個式子不包含故障支鏈,可以作為修復的依據,首先將f1,f5修復后,然后進行故障自診斷得到f2為故障支鏈,此時f2等號右邊兩個式子均可作為修復的依據,將f2修復,最后再進行故障自診斷,此時不再有故障支鏈,修復完成。
將上述情況總結為:在修復過程中,從故障方程中只有1個故障支鏈的方程開始修復,再對初步修復后的12支鏈力進行故障自診斷得出新的故障支鏈,然后再進行修復,重復以上過程直到故障自診斷步驟不再出現故障支鏈,即可完成故障自修復過程。修復后的結果即為重構的輸出響應。完整的故障自修復算法可以表達為如圖4所示。
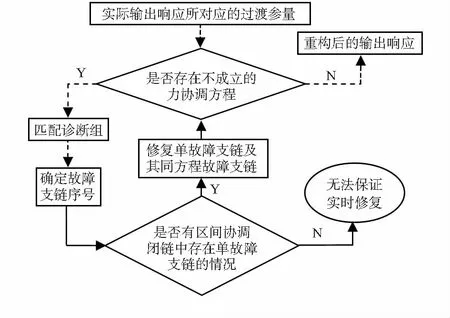
圖4 故障自診斷自修復流程
為了評估故障自診斷自修復算法的效果,定義故障診斷修復率dv如下
(13)
式中w為基于系統協調閉鏈的故障處理算法可修復故障工況總數;s為不同數量支鏈所有可能出現的故障工況總數。
經統計計算,并聯式六維加速度傳感器的故障自診斷修復情況如表2所示。考慮到本算法修復故障支鏈時是從只包含一個故障支鏈的協調方程開始修復,故可修復工況為不包含協調閉鏈六條邊上兩個支鏈序號的組合。
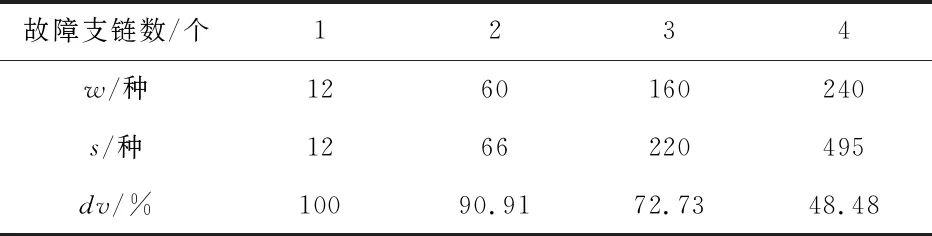
表2 故障自診斷自修復工況
為了描述具有多支鏈的傳感器出現故障時,基于不同故障修復算法的修復能力,假設每條支鏈出現故障的概率為a(a<1),定義故障自修復率指標rFSR
(14)
式中n為傳感器支鏈個數,si為傳感器存在i條故障支鏈時的故障診斷修復率。
傳感器支鏈以不同概率出現故障時,將表2的故障修復比例代入故障自修復率指標,基于此算法及文獻[15]算法的傳感器故障自修復率分別如圖5所示。通過圖5可以得到本算法的故障自修復率最高為72.62 %,且a小于22 %時,本文算法的自修復率高于文獻[15]算法。
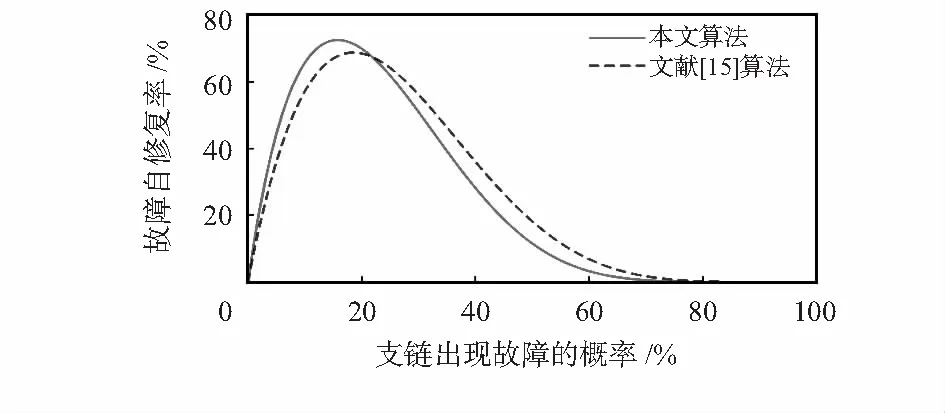
圖5 故障自修復率
3 算例驗證
為驗證故障修復算法的正確性和有效性,在動力學軟件ADAMS中建立六維加速度傳感器的樣機,如圖6所示。
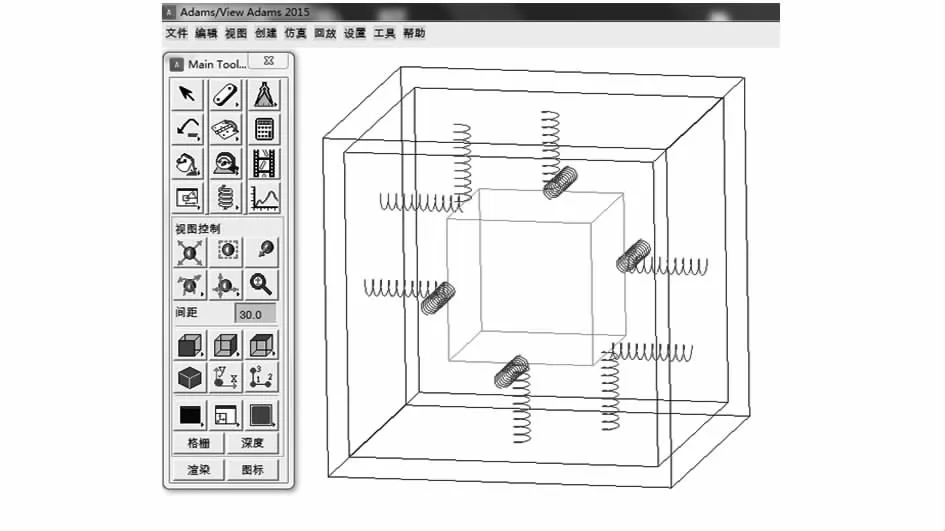
圖6 并聯式六維加速度傳感器的虛擬樣機
在傳感器外殼上分別沿(-10,5,7)和(8,6,-7)方向施加直線驅動和旋轉驅動,驅動函數分別設置為χ=20.00cos(10πt)-20.00(mm)和φ=2.87cos(10πt)-2.87(rad),借助MATLAB軟件進行數據處理,假設支鏈1發生短路故障(置0 N),部分支鏈2發生偏置故障(偏置+1 N),支鏈5發生隨機擾動故障(擾動幅值為1 N)。
為檢驗修復結果的準確程度,將修復前后的結果代入解耦算法[8],對傳感器的六維加速度進行解耦,將支鏈修復前后的解耦進行對比,結果如圖7和圖8所示。
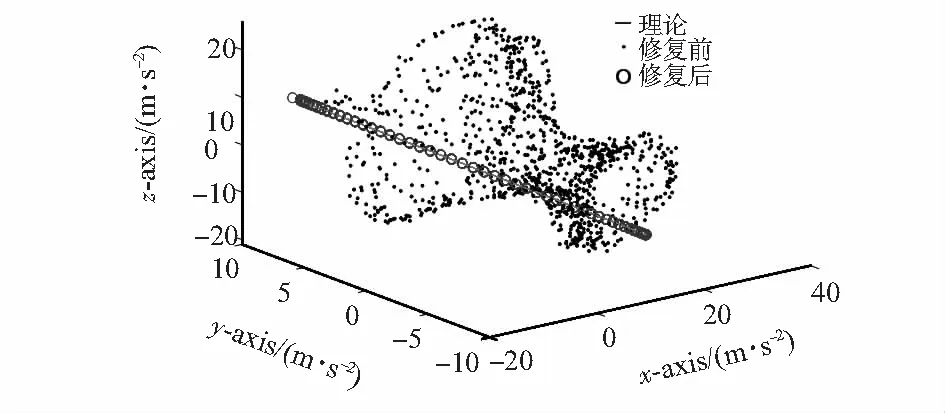
圖7 支鏈修復前、后線加速度對比
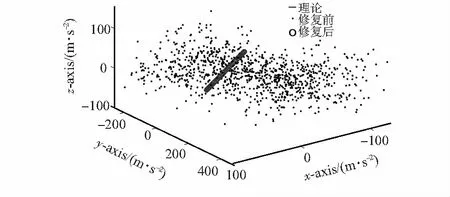
圖8 支鏈修復前、后角加速度對比
結果表明:修復前傳感器系統輸出錯誤,故障修復后,系統輸出與理論輸出吻合較好,樣機故障修復后的容錯解耦誤差不超過0.18 %,驗證了該算法的有效性。
4 結 論
構建了一種并聯式六維加速度傳感器的故障自診斷、自修復算法。提出了一種協調閉鏈的概念,即6個力協調方程對12個過渡參量的約束關系,以此建立其故障處理方法。定義傳感器的故障修復能力衡量指標,對可修復工況進行統計計算得到本算法故障自修復率最高為72.62 %,且傳感器支鏈出現故障概率低于22 %時,本算法自修復率均優于文獻[15]算法,這為多維傳感器的故障修復能力性能的評價提供了理論參考。樣機試驗結果表明:自診斷自修復工況下,虛擬樣機故障支鏈修復后重構系統的綜合解耦誤差不超過0.18 %,驗證了方案的可行性。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中國生殖健康(2019年3期)2019-02-01 06:12:26
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34
