基于多模型PF的風(fēng)力機(jī)槳距系統(tǒng)的故障診斷*
2019-12-24 09:21:14王進(jìn)花
傳感器與微系統(tǒng) 2019年12期
曹 潔, 任 倩, 王進(jìn)花
(1.蘭州理工大學(xué) 計(jì)算機(jī)與通信學(xué)院,甘肅 蘭州 730050;2.蘭州理工大學(xué) 電氣工程與信息工程學(xué)院,甘肅 蘭州 730050)
0 引 言
隨著風(fēng)力機(jī)裝機(jī)總量不斷增加,系統(tǒng)結(jié)構(gòu)日益復(fù)雜,不同部件之間耦合更加緊密,一個(gè)微小的故障可能傳播成災(zāi)難性的大故障,引起風(fēng)力機(jī)停機(jī),甚至直接導(dǎo)致機(jī)組損壞,這不僅浪費(fèi)了大量風(fēng)能,增加了維修成本,一定程度上還縮短了風(fēng)機(jī)的運(yùn)行壽命。風(fēng)力機(jī)槳距系統(tǒng)是風(fēng)力機(jī)運(yùn)行非常重要的一部分,同時(shí)也是風(fēng)力機(jī)故障的高發(fā)部位[1,2]。因此對風(fēng)力機(jī)槳距系統(tǒng)一些潛在的故障進(jìn)行檢測與分離是至關(guān)重要的。
槳距系統(tǒng)的故障診斷方法主要分為基于數(shù)據(jù)的故障診斷和基于模型的故障診斷。基于數(shù)據(jù)驅(qū)動(dòng)的故障診斷需要大量的離線歷史數(shù)據(jù),這些數(shù)據(jù)不能反映系統(tǒng)當(dāng)前的變化情況,具有工作量大且實(shí)時(shí)性差的問題[3~5]。
基于模型的故障診斷方法通過系統(tǒng)的結(jié)構(gòu)、行為和功能等方面的知識(shí)對系統(tǒng)進(jìn)行診斷推理,無需先驗(yàn)知識(shí),對故障數(shù)據(jù)的依賴性較小[6]。文獻(xiàn)[7]通過建立風(fēng)力機(jī)槳距系統(tǒng)動(dòng)態(tài)模型,利用基于模型的方法對槳距系統(tǒng)進(jìn)行故障檢測。文獻(xiàn)[8]提出了一種基于觀測器的多新息隨機(jī)梯度辨識(shí)算法的故障診斷方法,實(shí)現(xiàn)了槳距系統(tǒng)的故障檢測。文獻(xiàn)[9]通過帶擾動(dòng)補(bǔ)償器的離散時(shí)間控制器對槳距系統(tǒng)進(jìn)行故障檢測與容錯(cuò)控制,有效地檢測出了槳距系統(tǒng)執(zhí)行器的故障。文獻(xiàn)[10]采用區(qū)間預(yù)測方法診斷風(fēng)力機(jī)槳距執(zhí)行器故障,提高了故障診斷的魯棒性。文獻(xiàn)[7~10]均實(shí)現(xiàn)了槳距系統(tǒng)的故障檢測,但在實(shí)際應(yīng)用中,系統(tǒng)存在的各類信號(hào)擾動(dòng)和隨機(jī)噪聲,會(huì)對故障診斷準(zhǔn)確性的產(chǎn)生影響,以上文獻(xiàn)均沒有對其作詳細(xì)的研究。
因此,本文針對各類信號(hào)擾動(dòng)和隨機(jī)噪聲導(dǎo)致的故障診斷不準(zhǔn)確的問題,在槳距系統(tǒng)的多故障模型的基礎(chǔ)上,采用粒子濾波對其進(jìn)行狀態(tài)估計(jì);設(shè)計(jì)并優(yōu)化自適應(yīng)閾值,提高故障檢測的準(zhǔn)確率同時(shí)減少計(jì)算時(shí)間,引入J散度改進(jìn)基于多模型的故障分離方法,提高故障分離的準(zhǔn)確性。
1 風(fēng)力機(jī)槳距系統(tǒng)故障模型
1.1 槳距系統(tǒng)執(zhí)行器數(shù)學(xué)模型
本文針對槳距角執(zhí)行器故障問題進(jìn)行研究,風(fēng)力機(jī)槳距系統(tǒng)由3個(gè)完全一致的槳距執(zhí)行器組成,槳距執(zhí)行器通過旋轉(zhuǎn)葉片控制槳距角的大小。槳距執(zhí)行器可以建模為槳距角β(t)和槳距角參考值βref(t)之間的傳遞函數(shù)。β(t)是槳距系統(tǒng)的輸出,βref(t)是風(fēng)力機(jī)控制器給出的設(shè)定值。槳距執(zhí)行器的二階傳遞函數(shù)模型如下[11]
(1)
式中ωn為槳距系統(tǒng)的自然頻率,ζ為槳距系統(tǒng)的阻尼系數(shù)。
1.2 槳距系統(tǒng)執(zhí)行器故障模型


表1 槳距系統(tǒng)故障特征參數(shù)表
2 多模型粒子濾波的故障診斷
2.1 粒子濾波算法
假設(shè)k時(shí)刻非線性系統(tǒng)的狀態(tài)值是xk,量測值是zk,則非線性系統(tǒng)的動(dòng)態(tài)空間模型可表示為[12]:狀態(tài)模型xk=fk(xk-1,uk-1);量測模型zk=hk(xk,vk)。其中,fk(·)為系統(tǒng)狀態(tài)轉(zhuǎn)移函數(shù),hk(·)為系統(tǒng)觀測函數(shù),uk-1與vk分別是非線性系統(tǒng)的過程噪聲和量測噪聲,且兩者互不相關(guān)。
標(biāo)準(zhǔn)粒子濾波算法是通過前一時(shí)刻的狀態(tài)值和當(dāng)前時(shí)刻的量測值來遞推估計(jì)當(dāng)前時(shí)刻狀態(tài)值的過程,其重要性密度函數(shù)選取的是先驗(yàn)概率密度p(x0),并引入重采樣技術(shù)來緩解粒子退化問題。標(biāo)準(zhǔn)粒子濾波算法主要由初始化、粒子預(yù)測、權(quán)值計(jì)算、狀態(tài)更新、重采樣組成,其具體的實(shí)現(xiàn)步驟如下:

(2)
從而得到近似后驗(yàn)概率密度為
(3)
5)判斷是否結(jié)束:若結(jié)束,則退出該算法,反之轉(zhuǎn)到(2)。
2.2 多模型粒子濾波的故障診斷
假設(shè)一個(gè)非線性系統(tǒng)可以用如下描述
Σm:xk=f(xk-1,uk-1),yk=h(xk)
(4)
式中x∈Rnx為系統(tǒng)狀態(tài)向量,y∈Rny為系統(tǒng)觀測向量,u∈Rnu為控制向量。
假設(shè)存在有限個(gè)已知的模型Σi(i=1,2,…r)
(5)

稱式(5)為式(4)的多模型描述,Σs為子模型族,Σi(i=1,2,…r)為子模型。
假設(shè)系統(tǒng)存在n個(gè)已知的故障模型,各種故障模型為
(6)
正常模型為
(7)
式中m=1,2,…,n為各種故障模型。則需要設(shè)計(jì)n+1個(gè)粒子濾波器,每個(gè)粒子濾波器獨(dú)立監(jiān)控一種狀態(tài)。
3 槳距系統(tǒng)故障診斷
3.1 故障診斷算法原理
構(gòu)建系統(tǒng)的狀態(tài)空間模型如下
20世紀(jì)50年代末,美國語言學(xué)家約瑟夫·H·格林伯格打開了語言學(xué)研究的一個(gè)新的領(lǐng)域——語言類型學(xué)。該理論主要的觀點(diǎn)是在對人類語言的機(jī)制和規(guī)則進(jìn)行概括總結(jié)時(shí),必須要進(jìn)行跨語言驗(yàn)證,而要研究任何一種語言的特點(diǎn)都離不開跨語言比較出的共性和類型分類的基礎(chǔ)。我國著名英語學(xué)者許國璋也提出:“過去的研究太過于強(qiáng)調(diào)漢語和歐洲語言之間的差異,而忽視了兩者之間的相同點(diǎn)。”[1]近年來,語言類型學(xué)逐漸風(fēng)靡,挖掘漢語和英語之間的共性和差異,掌握兩者之間的普遍特征成為潮流。
xk+1=Axk+Buk+ωk,yk=Cxk+vk
(8)
狀態(tài)量為x=[βωrωgθΔ]T,控制量為u=[TrTgβref]T,y為槳距角,A,B,C為已知的系統(tǒng)矩陣,ωk和vk分別為系統(tǒng)噪聲與觀測噪聲,且兩者互不相關(guān)。
根據(jù)風(fēng)力機(jī)槳距系統(tǒng)的故障描述,及式(13)、式(14)多模型粒子濾波的設(shè)計(jì)可得到以下故障診斷原理圖,如圖1。
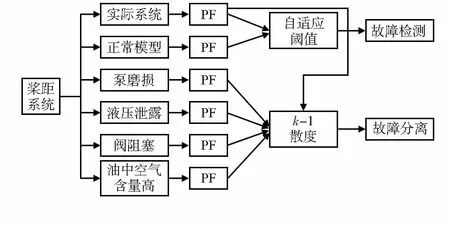
圖1 槳距系統(tǒng)多模型故障診斷算法原理框圖
3.2 自適應(yīng)閾值的設(shè)計(jì)
在系統(tǒng)多故障模型的基礎(chǔ)上,將理想觀測值和實(shí)際系統(tǒng)狀態(tài)的觀測值產(chǎn)生的差值作為殘差,殘差是判斷故障是否發(fā)生的依據(jù),針對傳統(tǒng)故障檢測方法中故障誤報(bào)率高,實(shí)時(shí)性差的問題,本文引入統(tǒng)計(jì)學(xué)中置信區(qū)間的思想設(shè)計(jì)一個(gè)隨著殘差變化的自適應(yīng)閾值[13],k時(shí)刻的殘差大于閾值,則說明系統(tǒng)發(fā)生了故障。假設(shè)殘差的統(tǒng)計(jì)特性符合正態(tài)分布,則殘差的均值和方差為
(9)
(10)
式中η(uj,tk)為輸入為uj時(shí)tk時(shí)刻殘差的均值。δ2(uj,tk)為輸入為uj時(shí)tk時(shí)刻殘差的方差。
引入統(tǒng)計(jì)學(xué)中置信區(qū)間運(yùn)用于設(shè)計(jì)自適應(yīng)閾值,但這種方法計(jì)算自適應(yīng)閾值,為了得到當(dāng)前時(shí)刻殘差的均值和方差,在算法迭代的每一步都需要系統(tǒng)重復(fù)運(yùn)行n次,計(jì)算量近似指數(shù)增長,很難滿足實(shí)際系統(tǒng)的實(shí)時(shí)性要求。本文受文獻(xiàn)[14]啟發(fā),引入一個(gè)經(jīng)過多次實(shí)驗(yàn)得到的帶寬系數(shù)來優(yōu)化自適應(yīng)閾值的均值和方差,使得均值和方差的計(jì)算只依賴上一時(shí)刻的值,從而達(dá)到在保證故障檢測準(zhǔn)確率的同時(shí)提高實(shí)時(shí)性。
自適應(yīng)閾值定義為
rth,k=η(uj,tk)±2.17δ(uj,tk)
(11)
第N時(shí)刻殘差的均值和方差表示為
(12)
(13)
(14)
(15)
3.3 故障分離
傳統(tǒng)的故障分離方法受信號(hào)干擾、噪聲影響較大,不能充分地利用故障特征;J散度與多模型結(jié)合的故障分離方法可以充分提取粒子濾波估計(jì)后的非高斯故障特征,在系統(tǒng)建模不精確的情況下提高故障分離的準(zhǔn)確性。
1)J散度
假設(shè)一維隨機(jī)變量為存在兩種可能的概率密度函數(shù)p1(ζ)和p2(ζ),則p1(ζ)對p2(ζ)的信息散度為[15]
(16)
為了克服其不對稱性,提出了J散度
DJ(p1(ζ),p2(ζ))=
(17)
2)基于J散度的故障分離
首先通過核密度估計(jì)公式計(jì)算故障模型輸出和實(shí)際系統(tǒng)模型輸出的概率密度函數(shù),再通過J散度計(jì)算兩個(gè)輸出的散度大小,散度越小則為同一故障的可能性越大。
假設(shè)ζ1,ζ2,…,ζ為實(shí)際系統(tǒng)輸出ζ的一組統(tǒng)計(jì)數(shù)據(jù),則其概率密度函數(shù)ζ的核密度估計(jì)為
(18)
假設(shè)θ1,θ2,…,θ為故障模型輸出θ的一組統(tǒng)計(jì)數(shù)據(jù),則其概率密度函數(shù)p(θ)的核密度估計(jì)為
(19)
實(shí)際系統(tǒng)輸出與故障模型輸出的J散度
D(p1(ζ),p2(θ)=
(20)
算法流程如圖2。
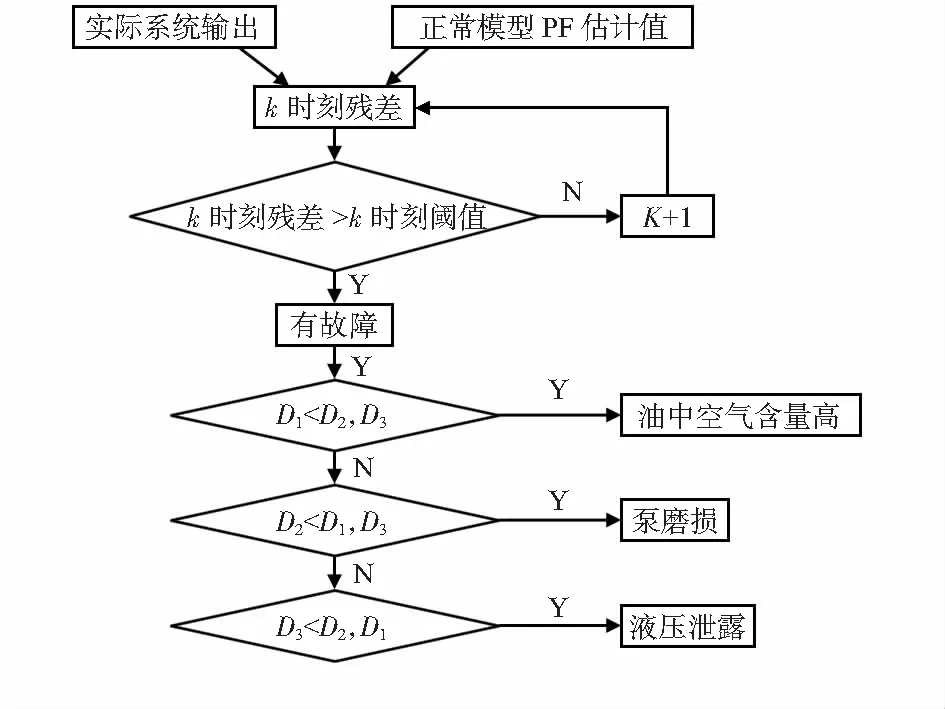
圖2 故障診斷算法流程框圖
4 仿真分析
采用4.8 MW級(jí)風(fēng)力發(fā)電系統(tǒng)實(shí)際參數(shù),通過改變實(shí)際風(fēng)力機(jī)的故障特征參數(shù)模擬風(fēng)力機(jī)槳距系統(tǒng)的三種故障,利用MATLAB平臺(tái),設(shè)置初始狀態(tài)x=[0.404 63 162 5.6 0.504]T,輸入為u=[5.915 4×107500 4.5]T,采樣粒子數(shù)N=200,仿真時(shí)間T=200 s,離散步長ΔT=0.01 s。考慮系統(tǒng)中存在未知噪聲等干擾的影響,采用滑動(dòng)窗M,M=20。本文設(shè)置噪聲形式為ω~Γ(0.1,0.1),v~Γ(0.1,0.1)。
故障誤報(bào)率pf和漏報(bào)率pm
式中A為系統(tǒng)實(shí)驗(yàn)的總仿真數(shù),C為在A次仿真中系統(tǒng)未發(fā)生故障時(shí)殘差大于閾值的時(shí)間點(diǎn)總數(shù),D為一次仿真中系統(tǒng)未發(fā)生故障的時(shí)間點(diǎn)的總數(shù),E為在A次仿真中系統(tǒng)發(fā)生故障時(shí)殘差小于閾值的時(shí)間點(diǎn)總數(shù),F為一次仿真中系統(tǒng)發(fā)生故障的時(shí)間點(diǎn)總數(shù)。
假設(shè)故障的出現(xiàn)在120~140 s,故障表示信號(hào)為

實(shí)驗(yàn)一:故障檢測。本文引入的自適應(yīng)閾值檢測故障的算法中,置信度為97 %,Z=2.17。
圖3為當(dāng)實(shí)際系統(tǒng)依次發(fā)生油中空氣含量高、泵磨損、液壓泄露三種故障時(shí)自適應(yīng)閾值與殘差的變化,可以看出,0~120 s和140~200 s時(shí),殘差一直處于平穩(wěn)狀態(tài),并且小于自適應(yīng)閾值,120 s時(shí)殘差發(fā)生突變,120~140 s時(shí)殘差大于自適應(yīng)閾值,可見系統(tǒng)在120~140 s發(fā)生了故障,因此本文故障檢測算法可以有效的實(shí)現(xiàn)故障檢測。
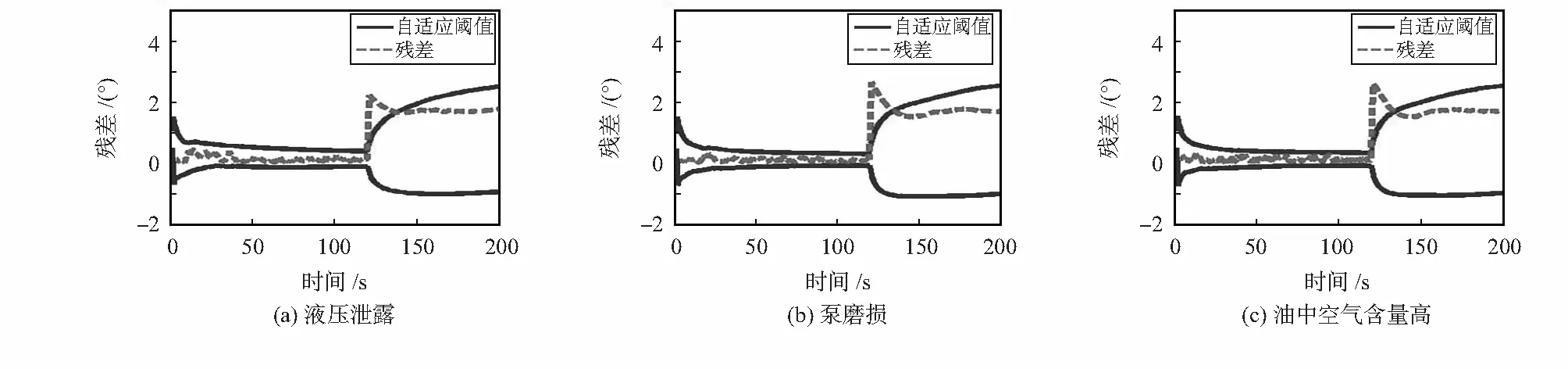
圖3 三種故障下的殘差與自適應(yīng)閾值對比
圖4為固定閾值法[16]與自適應(yīng)閾值法的故障檢測結(jié)果,0代表發(fā)生故障,1代表無故障,120~140 s時(shí)實(shí)線比虛線的檢測點(diǎn)數(shù)更多,可見自適應(yīng)閾值檢測法的檢測結(jié)果比殘差平滑值檢測法更準(zhǔn)確。
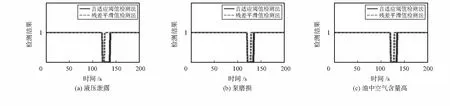
圖4 兩種檢測算法的檢測結(jié)果
表2為以上兩種檢測算法所得結(jié)果的漏報(bào)率與誤報(bào)率,實(shí)驗(yàn)中系統(tǒng)運(yùn)行50次,每次運(yùn)行的采樣點(diǎn)數(shù)為500,通過對所有采樣點(diǎn)在50次運(yùn)行中出現(xiàn)漏報(bào)的采樣點(diǎn)數(shù)進(jìn)行統(tǒng)計(jì),并利用漏報(bào)率公式計(jì)算得到漏報(bào)率。明顯自適應(yīng)閾值算法比殘差平滑值方法更加準(zhǔn)確,故障漏報(bào)率和誤報(bào)率都有了減小。可見本文故障診斷算法相比固定閾值檢測法明顯提高了準(zhǔn)確性。

表2 兩種方法的漏報(bào)率與誤報(bào)率
表3為優(yōu)化前與優(yōu)化后的自適應(yīng)閾值檢測法的計(jì)算時(shí)間對比,可以看出優(yōu)化后的自適應(yīng)閾值檢測法比優(yōu)化前明顯提高了計(jì)算效率。并且當(dāng)粒子數(shù)越多,計(jì)算時(shí)間縮短越明顯。由此可見,本文算法提高了故障診斷的實(shí)時(shí)性。
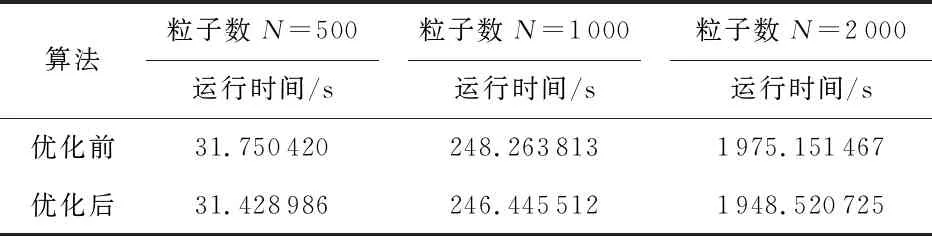
表3 優(yōu)化前后的運(yùn)行時(shí)間對比
實(shí)驗(yàn)二:故障分離。當(dāng)實(shí)際系統(tǒng)依次發(fā)生三種故障時(shí),采用兩種不同的分離方法所產(chǎn)生的分離結(jié)果如圖5、圖6。

圖5 基于J散度的故障分離結(jié)果
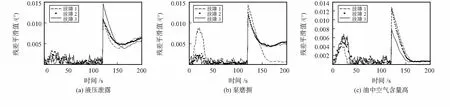
圖6 基于殘差平滑值的分離結(jié)果
圖5為基于J散度的故障分離結(jié)果,圖6為基于殘差平滑的故障分離結(jié)果[17],如圖所示當(dāng)實(shí)際系統(tǒng)發(fā)生三種故障時(shí),基于J散度的分離方法可以清晰的看出,發(fā)生第i類故障的Di最接近0,由此可以判斷出此時(shí)系統(tǒng)發(fā)生的故障類型為第i類。而基于殘差平滑值的方法每一時(shí)刻大小不一致,很難判斷看出哪個(gè)更接近0,它受系統(tǒng)噪聲與信號(hào)干擾的影響較大。以上可見本文方法能夠更加準(zhǔn)確地分離出故障。
5 結(jié) 論
風(fēng)力機(jī)槳距系統(tǒng)是個(gè)非線性、強(qiáng)耦合的系統(tǒng),存在各種噪聲、信號(hào)干擾,從而導(dǎo)致建模不精確,本文在槳距系統(tǒng)多故障模型的基礎(chǔ)上,采用粒子濾波算法對其進(jìn)行狀態(tài)估計(jì),得到每個(gè)模型的輸出,引入自適應(yīng)閾值,利用經(jīng)過多次實(shí)驗(yàn)得到的帶寬系數(shù)優(yōu)化自適應(yīng)閾值,實(shí)現(xiàn)了故障準(zhǔn)確檢測的同時(shí)減少了計(jì)算時(shí)間,提出J散度與多模型相結(jié)合的分離方法,允許建模誤差的情況下實(shí)現(xiàn)了故障的準(zhǔn)確分離,仿真結(jié)果驗(yàn)證了本文故障診斷算法的可行性和有效性。
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
重慶工商大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年10期)2015-12-28 07:43:58
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
汽車維護(hù)與修理(2015年2期)2015-02-28 12:15:39
振動(dòng)、測試與診斷(2014年5期)2014-03-01 01:14:21
