六自由度晃蕩平臺在實驗教學中的應用
2019-12-20 08:21:20朱建魯宋存永單衛光
實驗室研究與探索 2019年11期
朱建魯,宋存永,單衛光
(中國石油大學(華東)儲運與建筑工程學院 油氣儲運工程國家級實驗教學示范中心,山東 青島 266580)
0 引 言
全球海洋油氣資源潛力十分巨大。據國際能源署(IEA)統計,2017年全球海洋油氣技術可采儲量分別為10 970億桶和311萬億m3,分別占全球油氣技術可采總量的32.81%和57.06%[1],隨著能源的日益短缺以及需求量的不斷增加,海洋油氣資源的開發正逐步成為各國重要的能源發展戰略,在海上作業的油氣生產裝置,會隨著波浪一起晃動,進而對油氣生產工藝和設備造成影響[2]。在此背景下,我校油氣儲運工程專業依托國家級實驗教學示范中心,按照“新工科”建設的要求[3-4],采用實驗教學的模式,培養學生的創新實踐的能力,結合相關理論課教學,培養海洋油氣儲運工程人才[5-6]。
對于晃蕩問題,國內外有很多學者對其進行了研究[7-16]。晃蕩研究主要有3種方法:理論解析、數值模擬和物理模型試驗。理論解析和數值模擬法未能考慮液貨艙內部液體變化機理,無法科學真實的反映晃蕩所產生的問題,而模型試驗由于成本較低且較為可靠,是主流的研究手段,國內外各晃蕩研究機構均采用運動平臺在室內復現液艙的運動。六自由度晃蕩平臺是模擬波浪運動的實驗裝置,用來研究真實海洋條件下設備運行狀態,對于海上油氣開采具有重要意義。學生通過本實驗可以對比不同晃蕩條件下設備和工藝參數的變化,對于理解海上油氣集輸等課程中所學知識,并開展大學生創新實驗,培養理論知識應用能力和實驗創新能力。
1 六自由度晃蕩平臺教學設計
油田工藝系統中的大多數處理器,無論是油氣水分離器或凈化器都依靠重力分離原理。重力分離要求被處理液體處于較平穩的狀態,而浮式生產系統破壞了這種平穩狀態。其他的工藝設備都會受到運動的影響而降低操作性能。為了模擬海上運行的特點并驗證油氣儲運裝置在晃蕩工況下運行能行,設計并建造一套運動試驗臺。該運動試驗臺為六自由度運動試驗臺,除了能進行各單自由度運動外,還能在規定的角度處于長時間穩定傾斜狀態,主要由機械系統、驅動系統和伺服控制系統組成,驅動系統采用電動系統。
1.1 設計參數
最大負載質量:6 000 kg;
質心高:0.5 m;
上平臺尺寸為:4 m×4 m;
下平臺尺寸為:φ4.3 m六邊形
安裝在浮式平臺上的生產設備隨著浮體的運動或多或少會產生如圖1所示的6種形式的運動:縱蕩(surge)、橫蕩(sway)、垂蕩(heave),屬于線性運動;橫搖(roll)、縱搖(pitch)和首搖(yaw),屬于角度運動。海洋環境中不同浮式生產系統所受運動形式的影響程度存在差異,設計參數如表1所示。

圖1 船體的六自由度運動

表1 設計參數
1.2 硬件及軟件設計
六自由度電動運動試驗臺系統組成如圖2所示。
整個系統由以下4部分組成:
(1)機械系統。①平臺。用于負載、試件的安裝,并帶動負載、試件實現需要的運動。②上、下連接鉸。③預埋件。
(2)伺服控制系統硬件。①監控單元。主要功能為監控穩定平臺的工作狀態、接受操作人員控制指令,控制試驗系統完成試驗任務。②伺服控制單元。主要功能為實現系統啟動/停止、運動控制、系統的運動狀態監測、故障處理以及安全保護。③信號調理單元。主要功能為完成與系統運動狀態相關的各種位移、速度和數字I/O信號的調理,以及抱閘裝置的驅動等。
(3)驅動系統。①電動缸;②伺服電動機、驅動器、位置檢測設備。
(4)伺服控制系統軟件。伺服控制系統軟件結合伺服控制系統硬件完成系統各種控制功能,包括:①系統管理與監控軟件。②伺服控制應用軟件。
運動控制計算機為一臺工業控制計算機,其上運行運動控制軟件,界面見圖3。運動控制計算機的主要功能包括:產生各種運動波形,運動波形的幅度、頻率等參數受監控單元控制,實時運動學解算,將運動試驗臺位姿指令轉換為電動缸的位移指令,電動缸的位置閉環控制,以便精確實現各種運動軌跡,運動試驗臺的啟動、停止等邏輯控制,接收驅動器返回的編碼器信號,用于伺服電機閉環控制。

圖3 控制軟件界面
1.3 實驗步驟與安排
實驗裝置分為上位機和下位機,學生分為兩組,每組人數2~3人,第1組學生控制上位機,用來操作晃動平臺的運動型式、幅度和頻率,第2組學生控制下位機,以及工藝系統,記錄實驗數據。實驗操作步驟:
(1)打開下位機,進入主界面,選擇“客戶機與服務器設置”,“地址”框選擇“dstp://localhost/1_dof6”,點擊“連接”按鈕,若狀態欄輸出“active connected”,則與服務器連接成功。
(2)打開上位機,點擊進入“datasocket”,進入主界面后,“地址”框選擇“.1.4/1”,點擊“連接”按鈕,若狀態欄輸出“active connected”,則與服務器連接成功。
(3))“動態試驗”時,設定運行時間,點擊“進入中位”,選擇相應晃動型式按鈕(X軸、Y軸、Z軸、RX軸、RY軸、RZ軸),雙擊選框,輸入所需幅度mm/(°)、周期(s)和相位(°),點擊“全部參數輸送”,反饋參數輸送完成后,點擊“動態參數檢驗”、“動態運動”,設備開始運行;若中途需停止設備,點擊“動態停止”;若進行下一組工況時,需重新點擊“進入中位”后,修改參數、參數檢驗、驅動設備。
(4)自由度顯示時,選“自由度”,根據圖形顯示情況,相應調整“寬度倍數”、“間隔”數值。
(5)缸位移輸出顯示時,勾選“缸位移out”,根據圖形顯示情況,相應調整“寬度倍數”、“間隔”數值。
(6)缸位移反饋顯示時,選“缸位移return”,根據圖形顯示情況,相應調整“寬度倍數”、“間隔”數值。
(7)圖形存儲時,選“在線存盤wave.dat”,點擊“在線保存”,若需停止,點擊“停止保存”。
(8)實驗停止,關閉上位機,按照下位機操作步驟進行設備復位、關閉下位機。
2 晃蕩平臺應用
2.1 設備安裝
為了通過晃動實驗驗證海上工藝的合理性、晃動對于設備運行的影響以及整體裝置在晃動工況下的運行性能,將裝置固定于晃動平臺,通過調節晃動平臺的運行參數實現對不同海況的模擬[17],如圖4所示。

圖4 海上裝置晃蕩模擬實驗圖
實驗裝置需進行不同形式、不同頻率和不同幅度的晃動,因此對主要設備的撬裝強度和配管連接強度提出了更高的要求。為了增強主要設備、儀表和閥門的安裝固定強度,通過支架對各設備的連接強度進行增強,并對配管連接的螺紋和焊口進行加強,保證晃動實驗中設備安裝和配管連接的強度。
晃動實驗中需將主撬座固定至搖擺平臺上,主撬水平距離和豎直高度均發生變化。考慮到主撬需進行不同工況的晃動實驗,主撬與地面裝置應采用軟管重新連接。
驅動系統是運動試驗臺的運動執行部分,也是安全保護的具體執行者,為了保證運動試驗臺的安全運行,驅動系統設計了多種安全保護功能。主要包括:
(1)電動缸的保護。行程開關。在電動缸的兩端設置有行程開關,當電動缸到達行程開關處時,控制系統執行相關的保護動作。
(2)電機的剎車。①剎車裝置。當系統處于危險狀態時,電動機的動態剎車裝置可以把驅動系統減速。②機械抱閘。伺服電機除了具有動態剎車外,還有機械抱閘裝置,它與動態剎車相互配合,能夠實現要求的剎車過程。而且在系統斷電時,機械抱閘可以將伺服電機鎖住。
(3)驅動器的過流保護。過流保護。當電機的電流過大時,驅動器的逆變裝置會截止并報警。
2.2 平臺校核
為了防止在晃蕩過程中平臺失穩,對平臺進行了強度校核。平臺下表面安裝上鉸支座,上表面用于安裝負載,負載在平臺帶動下完成各種姿態的運動,如圖5所示。

圖5 運動試驗臺的上平臺
平臺主要參數如下:
(1)外形尺寸:4 000 mm×4 000 mm×162 mm;
(2)各部板厚:臺面板12 mm;底板6 mm;圍板8 mm;筋板12 mm;
(3)質量:2 454 kg(不含螺紋柱、下鉸底板及加強板)。
平臺前3階固有頻率分別為54.37、67.52、117.81 Hz。校核結果如圖6所示。

圖6 一階固有頻率54.37 Hz
結果表明,在晃蕩時平臺的受力集中在四周,而且在平臺形變和強度的范圍內,安全可行,可以開展實驗。
3 實驗結果與分析
3.1 晃蕩條件下分離器運行性能
以分離器為例,對晃蕩工況下裝置運行特點進行分析,如圖7所示。混合介質在繞管式換熱器之前氣液分離器中進行氣液分離,D1503分離罐中的液位在裝置靜止時基本維持穩定,無明顯波動;進行晃蕩時(橫搖5°,10 s),液位的波動曲線近似于正弦曲線,周期為10 s,變化幅度為116.44%,液位高度試驗比靜止時降低7 μm,變化幅度為15.6%,這是由于晃動使分離罐內液體液位高度產生周期性波動;氣相進出口前后壓差上升3.2%,說明由于晃動的影響,使得流動阻力增大;分離器后的繞管換熱器液位沒有變化,說明分離器起到了良好的緩沖作用,未對后續設備造成影響。
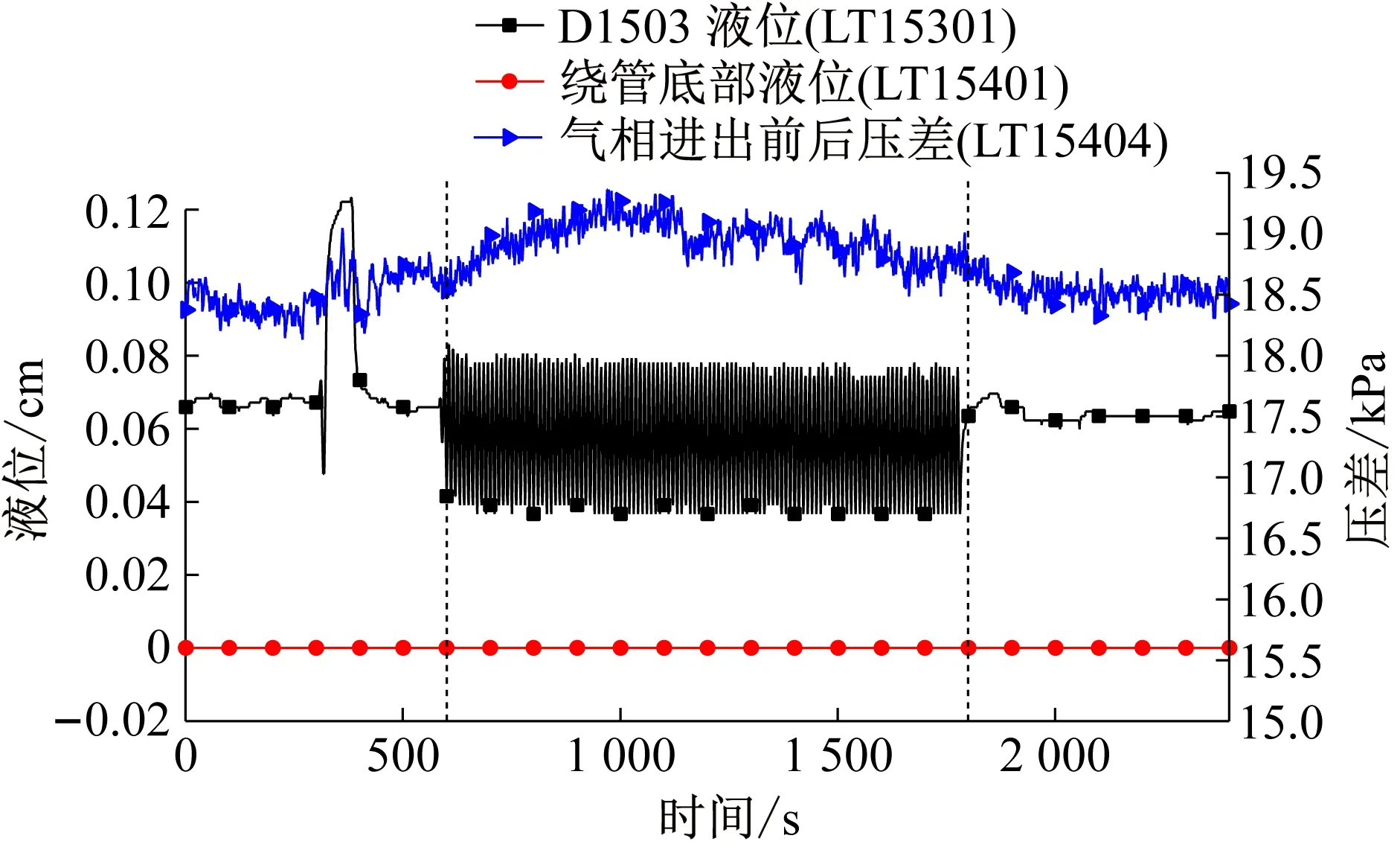
圖7 晃蕩工況下分離器性能
3.2 晃蕩條件下換熱器運行性能
如圖8所示。在相同晃動周期工況下,晃動角度越大,深冷氣相進出口溫差變化越劇烈,在晃蕩角度為9°時,變化幅度為-1.86%,變化幅度最大。這是由于在晃動工況下,殼側與管側接觸更加充分導致的。傾斜工況下,換熱器性能下降,晃動工況下,換熱器換熱能力有所改善,艏搖、縱蕩和垂蕩對換熱性能基本無影響,橫搖和縱搖產生積極影響,同時縱搖影響比橫搖影響大。當晃動幅度越大,頻率越大時,縱搖晃動對換熱的促進效果越明顯。

圖8 不同晃蕩幅度工況下換熱器溫差圖
4 實驗教學成效
實驗教學中采用六自由度晃蕩平臺的教學成效主要體現在:
(1)適應專業發展的需求,油氣領域目前從陸上向海洋發展,通過實驗教學讓學生了解海洋條件下,油氣儲運設備和工藝的運行情況,通過實驗接觸學科前沿,更加深入、全面掌握理論知識,培養創新能力。
(2)有助于學生對理論教學知識的理解,并鼓勵學生自主設計實驗并驗證,激發學生的學習積極性,提升教學效果和質量,并豐富了研究手段,實現了海洋學科和石油與天然氣學科的有效融合。
(3)中心的教師和學生可利用六自由度晃蕩平臺應用于科研,部分科研成果也可轉化為本科實驗教學內容,實現實驗室資源的有效整合和良性循環,即促進了科研的進步,又讓學生學到了更多的知識。
5 結 語
為了模擬油氣儲運裝置在海上晃動工況下的運行特點,設計了一套模擬海上船體運動的六自由度晃蕩平臺,并將核心設備安裝在平臺上,實驗結果表明,在晃蕩時,平臺的受力集中在四周,而且在平臺形變和強度的范圍內,滿足設計要求;海上晃蕩工況下,分離器的液位和流動阻力發生波動,但起到了良好的緩沖作用,保證后續設備運行參數的穩定;傾斜工況下,換熱器性能下降,晃動工況下,換熱器換熱能力有所改善,晃動幅度越大,頻率越大時,縱搖晃動對換熱的促進效果越明顯。
實驗教學中采用六自由度晃蕩平臺對油氣儲運行業在海洋領域的發展具有指導意義,對于學生學科前沿領域的培養具有指導重要作用。
猜你喜歡
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中國特種設備安全(2022年6期)2022-09-20 02:52:28
甘肅教育(2020年4期)2020-09-11 07:42:36
物理之友(2020年12期)2020-07-16 05:39:20
甘肅教育(2020年8期)2020-06-11 06:10:04
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
電子制作(2018年11期)2018-08-04 03:26:08
中國教育技術裝備(2016年11期)2016-12-01 06:53:03
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
