超聲檢測缺陷三維成像技術
2019-12-19 07:10:08王應燾李彥軍2芮執元剡昌鋒王文斌3張羅丹李景俊
無損檢測 2019年12期
王應燾,李彥軍2,芮執元,剡昌鋒,王文斌3,張羅丹,李景俊
(1.蘭州理工大學 機電工程學院,蘭州 730000;2.蘭州石化職業技術學院 機械工程學院,蘭州 730000;3.甘肅銅城工程建設有限公司,白銀 730900)
航空發動機葉片作為現代工業制造的“皇冠”,一直是中國航空工業的重中之重,其安全性問題也一直深受關注[1-2]。葉片在發動機的渦輪艙內承受高溫、高壓、腐蝕燃氣的沖擊,容易形成點蝕、裂紋、折斷等缺陷,而引起重大的安全隱患[3-4]。超聲無損檢測方法很多,但是顯示結果大多是二維圖像,由于三維超聲成像技術具有顯示結果立體、形象直觀、可調整角度觀察可疑結構等優點,極大地提高了檢測質量,減少了漏檢、誤檢等現象,具有廣闊的市場前景和研究價值[5]。高質量的圖像能直觀地反映出被測物體的三維結構,進而能夠通過圖像處理技術對缺陷進行定性、定量分析。將超聲三維成像技術應用于航空發動機葉片的超聲無損檢測中,會改善葉片檢測的靈敏度、結果的可靠性和準確性[6]。筆者將超聲檢測后得到的點云數據稱之為超聲點云,超聲點云三維可視化技術可以直觀顯示被測件的整體模型,克服了傳統超聲檢測技術缺陷顯示不清楚、難以判斷等缺點。
1 超聲點云三維可視化技術
1.1 超聲點云三維重構
為了將離散的點云重構為連續的曲面,文章應用Delaunay三角剖分與網格增長的混合方法來實現葉片超聲點云的三維重構。即首先通過Delaunay三角剖分算法,將輸入的點云集(見圖1)分割成四面體集,剖分結果如圖2所示;然后依據判斷準則[見圖3,圖中ri與ri+1分別為四面體i和四面體i+1的外接球體半徑,d為兩球心之間的距離。凸包內第i個三角面片的相接系數Ii為兩球心坐標與兩球交點所組成夾角的余弦值。以相接系數的大小篩選三角形,選出相接系數<-0.8(夾角>143.1°),并且頂點沒有重合的那些三角形]對所有四面體集中的三角形進行一次篩選(篩選結果見圖4);最后通過網格增長的方法補齊曲面中的其他三角形后形成網格曲面,結果如圖5所示。

圖1 C掃描葉片點云原始數據的分布

圖2 三維Delaunay剖分結果

圖3 相鄰三角形的相接系數Ii

圖4 按相接系數篩選后的結果
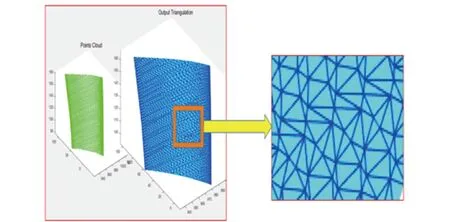
圖5 網格增長結果
1.2 建立著色模型
1.2.1 OpenGL光照模型
為了使重構后的曲面看起來更加逼真,需要建立著色模型。OpenGL光照模型為Phong模型,Phong模型在模擬光照過程中綜合考慮了漫反射、鏡面發射和環境光的作用。OpenGL中的光源是基于三原色RGB值來表示有色光的,將以上3種反射強度值組合.就得到了如式(1)所示的Phong模型光照計算公式。
I(R,G,B)=Ia(R,G,B)ρa(R,G,B)+

(1)
式中:Ia(R,G,B)為環境光源強度;ρa(R,G,B)為環境光反射系數;Id(R,G,B)為漫反射光源強度;ρd(R,G,B)為漫反射系數;Is(R,G,B)為鏡面反射光源強度;ρs(R,G,B)為鏡面反射系數;m為平面上一點的法向量;v為漫反射分量;f為鏡面反射集中度;h=[(s+v)/(|s|+|v|)]/2。
1.2.2 顏色映射方案
(1) CIELAB顏色空間
RGB顏色空間中基于三原色的表示方式只是通過相互混合的方式來模擬亮度的改變的,因此在視覺上給人不均勻的感覺,而CIELAB空間以數字化的方式來描述顏色變化,任何一種顏色都可以在其空間中表達出來,因此CIELAB空間所能表示的顏色種類要比RGB空間的多。如圖6所示,在CIELAB空間中L*軸直接表示了亮度的改變,其范圍為0~100,0為黑色,100為白色。a*軸表示了綠→紅的變化,b*軸表示了藍→黃的變化。因此任意光在CIELAB空間中可表示為
I={(L*,a*,b*)|L*∈[0,100],
a*∈[-100,100],b*∈[-100,100]}
(2)

圖6 CIELAB顏色空間結構示意
(2) 制定顏色映射方案
在CIELAB空間中描述兩點間色差的改變,可以直接用式(3)表示。

(3)
式中:c1,c2分別表示空間中不同的顏色值向量。
色度條實際上是由多條顏色帶組成的,因此知覺均勻性是指在顏色帶寬相同的條件下,相鄰的顏色變化是均勻的。設ΔE為相鄰顏色變化的值,c(x)表示顏色映射表中的一組顏色向量,那么假如ΔE{c(x),c(x+Δx)}/Δx=C,C為常量,就可以定義這種顏色方案是具有知覺均勻性的。
在工程領域中,獲得符合特定幾何規律的離散數據點的方法為:首先構造出連續的函數模型,而后再以不同的采樣頻率進行離散化來得到。因此,如果有連續條件的存在時,可理解為

(4)
將式(4)代入到式(3)中,可得

(5)

圖7 分散映射色度曲線圖
(3) Msh顏色空間
為了更方便地確定兩極分散顏色映射色度中L*,a*,b*分量的值,引入Msh顏色空間,就是將CIELAB空間中的3個分量轉化到Msh顏色空間下來表示。如圖8所示,M表示該處顏色值的大小,s表示顏色向量與+L*軸的夾角,h表示顏色向量在紅-藍平面內投影與+a*軸的夾角。
Msh空間→CIELAB空間為

(6)
CIELAB空間→Msh空間為

(7)
假設在Msh空間中只有s是變量,則有
c(x)=[Mcos(x),Msin(x)cos(h),
Msin(x)sin(h)]
(8)
而當s(x)以不變的斜率sm變化時,便可獲得圖8所示的兩極分散曲線。
cos2s(x)(cos2h+sin2h)]}1/2=Msm
(9)
顯然,M,sm是常量的條件下,這種插值方式獲得的色度表是知覺均勻的。

圖8 Msh空間示意
(4) 離散化RGB分量的獲取
當以sm為斜率求取離散化的s(x)值后,再經過CIELAB到RGB的轉換,最終獲得能夠在OpenGL中實現顏色渲染所需的顏色值。CIELAB到RGB的轉換必須在xyz空間中過渡,轉換公式如式(10)所示。
CIELAB→CIExyz
(10)

(11)
式中:t∈[0,1], 且xn,yn,zn是參照了白點的CIExyz三色刺激值,一般默認是95.047,100.0,108.883。
CIExyz→RGB
(12)

(13)
式中的R,G,B值是為了提高圖像的對比度經過γ校正后的值,因此還要經過還原過程,計算過程如下

(14)

(15)
最終所得的兩極顏色映射色度條如圖9所示,色度條左端為藍色,右端為紅色,并且亮度值從兩端到中間的變化規律一致,即具有兩極分散的特性。在設計方面,讓數據中處于閾值以下的顏色呈現出冷色(藍色端),處于閾值以上的數據呈現出暖色(紅色端)。

圖9 兩極顏色映射色度條
(5) 插值法顏色映射
插值法是將離散的R,G,B分量分別通過曲線擬合的方法得到其連續的數學表達式,從而使得在數據點映射時,每個強度值都對應于不同的顏色。
①R分量擬合曲線如圖10(a)所示,所得R分量擬合函數如式(16)所示。
f(x)=p1x5+p2x4+p3x3+p4x2+
p5x+p6
(16)
式中:p1=883(761.5,1 005);p2=-2 097(-2 403,-1 792);p3=1 229(1 023,1 574);p4=-269(-402.7,-189.3);p5=304.3(287.8,320.9);p6=84.6(83.83,85.38);括號內為置信界。
擬合優度評測參數值:殘差平方和為5.415,可決系數為0.999 9,調整后的可決系數為0.999 9,均方根誤差為0.456 3。根據擬合優度的評測標準,可決系數越接近于1,說明回歸直線對觀測值的擬合程度越好。
②G分量擬合曲線如圖10(b)所示,所得G分量擬合函數如式(17)所示。
f(x)=p1x6+p2x5+p3x4+p4x3+
p5x2+p6x1+p7
(17)

圖10 RGB分量擬合曲線
式中:p1=-7 067(-8 624, -5 510);p2=19 860(15 170,24 550);p3=-20 140(-25 510,-14 770);p4=8 565(5 651, 11 480);p5=-1 870(-2 624,-1 117);p6=586.4(540.9,667.9);p7=70.63(67.9,73.35)。
擬合優度評測參數值:殘差平方和為55.1,可決系數為0.999 5,調整后的可決系數為0.999 4,均方根誤差為1.485。
③B分量擬合曲線如圖10(c)所示,所得B分量擬合函數如式(18)所示。
f(x)=p1x5+p2x4+p3x3+p4x2+
p5x+p6
(18)
式中:p1=-1 004(-1207, -810.5);p2=2 906(2 396, 3 416);p3=-2 404(-2 864,-1 944);p4=-181.6(-186.3, 170.1);p5=355.8(328.1,383.4);p6=193.8(192.5,195.1)。
擬合優度評測參數值:殘差平方和為15.11,可決系數為0.999 9,調整后的可決系數為0.999 9,均方根誤差為0.762 4。獲得各分量的映射函數后,以強度值為各分量函數的自變量值,分別代入式(16),(17),(18)中,從而確定各點的RGB值。
2 試驗結果
系統所采用的機械手為六軸串聯式機械手,其末端能夠準確到達在機械手活動范圍內的笛卡爾坐標系六個自由度(x,y,z軸的移動以及分別繞3個軸向的轉動)的任意點,從而確保獲取的點云數據的精準度。圖11所示為原始發動機葉片的實物圖。在系統中單純的點云數據顯示不需要讀取額外的數據信息,只需將點云的每個點的坐標讀入即可,如圖12所示。利用Delaunay三角剖分與網格增長算法對葉片點云進行重構,結合OpenGL著色并繪制,得到的結果如圖13所示。

圖11 航空發動機葉片圖

圖12 葉片點云顯示

圖13 葉片點云三維重構并著色結果
3 結論
針對航空發動機葉片的超聲無損檢測結果三維可視化技術進行研究,通過研究葉片超聲點云三維成像方式、模型著色方法、葉片缺陷自動化識別等技術,開發出了顯示超聲點云三維成像模型、自動化檢測缺陷位置的三維成像系統,試驗結果表明該方法成像效果較好,能將被測件的缺陷基本準確地顯示出來,然后可基于檢測結果對被測件進行評估,判斷其壽命、安全性和可靠性,最終實現在航空工業超聲無損檢測領域中的實際運用。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
海峽科技與產業(2016年3期)2016-05-17 04:32:12
