基于PLC與MCGS組態(tài)軟件的電力拖動(dòng)仿真實(shí)訓(xùn)系統(tǒng)的研究
2019-12-06 06:26:44王琳輝
內(nèi)蒙古教育·科研版 2019年9期
王琳輝
摘 要:本文重點(diǎn)介紹了中高職學(xué)校電力拖動(dòng)控制線路課程仿真實(shí)訓(xùn)系統(tǒng)。采用PLC和嵌入式MCGS組態(tài)軟件,可以通過電腦動(dòng)畫仿真與實(shí)際線路聯(lián)動(dòng)來模擬電力拖動(dòng)實(shí)訓(xùn)項(xiàng)目。與傳統(tǒng)實(shí)訓(xùn)仿真相比,虛實(shí)結(jié)合、方便可靠、省時(shí)省力、效果逼真、界面友好。方便學(xué)生學(xué)習(xí)和掌握電力拖動(dòng)控制線路的原理和安裝。
關(guān)鍵詞:PLC;MCGS;組態(tài)軟件;電力拖動(dòng);仿真實(shí)訓(xùn)
【中圖分類號(hào)】G【文獻(xiàn)標(biāo)識(shí)碼】B【文章編號(hào)】1008-1216(2019)09B-0042-03
目前,中高職機(jī)電類、電氣類專業(yè)均開設(shè)電力拖動(dòng)基本控制線路這門實(shí)訓(xùn)課。在講授電機(jī)控制線路原理時(shí),教師普遍采用掛圖或黑板畫圖講授的方式。對(duì)于電路中電流走向,電器元器件的動(dòng)作過程,學(xué)生很難理解與掌握。根據(jù)教學(xué)實(shí)際情況,在師生中進(jìn)行了廣泛的調(diào)研,利用PLC、觸摸屏和MCGS組態(tài)軟件設(shè)計(jì)開發(fā)了電力拖動(dòng)實(shí)訓(xùn)及演示系統(tǒng)。該系統(tǒng)由上位機(jī)仿真軟件、下位機(jī)控制部分和實(shí)訓(xùn)設(shè)備本體組成。上位機(jī)采用MCGS組態(tài)軟件設(shè)計(jì)了所有電力拖動(dòng)控制線路仿真動(dòng)畫,下位機(jī)采用PLC、觸摸屏、接觸器制作了電力拖動(dòng)控制線路實(shí)訓(xùn)及演示裝置。采用串口或以太網(wǎng)通訊把上位機(jī)與下位機(jī)連接起來,從而實(shí)現(xiàn)用電腦控制實(shí)訓(xùn)裝置動(dòng)作,并保證電腦中電力拖動(dòng)控制線路動(dòng)畫與實(shí)訓(xùn)裝置中電機(jī)動(dòng)作過程聯(lián)動(dòng),達(dá)到理實(shí)一體、“學(xué)中做,做中學(xué)”的目標(biāo)。
一、系統(tǒng)總體設(shè)計(jì)
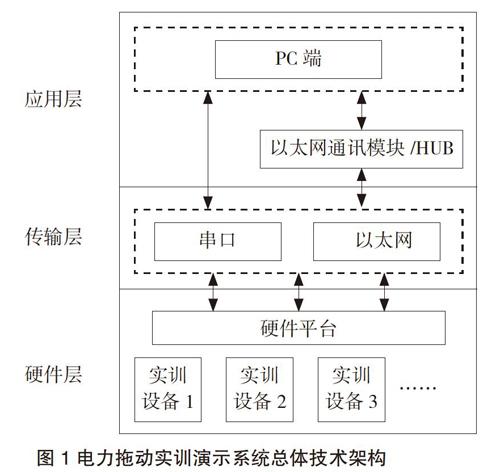
根據(jù)研究的設(shè)計(jì)要求,本文所研究的電力拖動(dòng)實(shí)訓(xùn)演示系統(tǒng)總體技術(shù)架構(gòu)如圖1所示。
該系統(tǒng)硬件層包括PLC與人機(jī)界面、實(shí)訓(xùn)設(shè)備本體組成的人機(jī)交互式硬件平臺(tái),介于應(yīng)用層和硬件層之間的傳輸層用于實(shí)現(xiàn)二者的信息交互和數(shù)據(jù)傳輸,主要有串口轉(zhuǎn)RS485通訊、以太網(wǎng)通訊。教師或?qū)W生通過PC端軟件實(shí)現(xiàn)與硬件層實(shí)訓(xùn)設(shè)備本體進(jìn)行交互,從而實(shí)現(xiàn)線路動(dòng)畫仿真軟件近程或遠(yuǎn)程與實(shí)訓(xùn)設(shè)備的聯(lián)動(dòng)。
二、 下位機(jī)設(shè)計(jì)
(一)實(shí)訓(xùn)設(shè)備本體設(shè)計(jì)
關(guān)于電氣控制實(shí)訓(xùn)設(shè)備本體部分,目前市場(chǎng)上較成熟的兩種方式是網(wǎng)孔板安裝式和接插線式。這兩種方式各有優(yōu)缺點(diǎn):網(wǎng)孔板式實(shí)訓(xùn)裝置利于學(xué)生提高電氣安裝、操作的技能,但也存在著費(fèi)時(shí)、耗材消耗大,不利于學(xué)生學(xué)習(xí)電路原理的缺點(diǎn);接插線式實(shí)訓(xùn)裝置采用帶絕緣護(hù)套的香蕉插頭、插線方式,具有安全、方便、快捷,利于快速學(xué)習(xí)電路原理的優(yōu)點(diǎn),但也存在著無法完成電氣安裝工藝實(shí)訓(xùn)的缺點(diǎn)。本研究設(shè)計(jì)的實(shí)訓(xùn)裝置本體部分采用了網(wǎng)孔板、接插線相結(jié)合的方式,集這兩種方式的優(yōu)點(diǎn)于一身,左側(cè)部分為接插線實(shí)訓(xùn)模塊,右側(cè)部分為網(wǎng)孔板實(shí)訓(xùn)模塊,這兩個(gè)模塊均設(shè)計(jì)成可拆卸的結(jié)構(gòu),可以根據(jù)實(shí)訓(xùn)項(xiàng)目的不同,安裝不同的模塊。
(二)控制部分設(shè)計(jì)
下位機(jī)控制部分采用三菱FX2N-48MR PLC和TPC7062Ti MCGS觸摸屏組成。主要有兩種通訊與控制方式,用來實(shí)現(xiàn)電氣實(shí)訓(xùn)設(shè)備的近程和遠(yuǎn)程控制。用RS485轉(zhuǎn)串口電纜把PLC與裝有仿真軟件的電腦直接相連,這種情況適用于近距離通訊、聯(lián)動(dòng)。PLC通過編程口,利用串口通訊與觸摸屏進(jìn)行連接,觸摸屏與互聯(lián)網(wǎng)相連,利用連接互聯(lián)網(wǎng)的PC機(jī)實(shí)現(xiàn)上位機(jī)仿真軟件與下位機(jī)通訊,二者聯(lián)動(dòng)。
(三)電路設(shè)計(jì)
本設(shè)計(jì)結(jié)合電力拖動(dòng)實(shí)訓(xùn)課內(nèi)容,歸納出電機(jī)連續(xù)正轉(zhuǎn)、電機(jī)正反轉(zhuǎn)、電機(jī)降壓?jiǎn)?dòng)、電機(jī)制動(dòng)、電動(dòng)機(jī)變頻控制等幾類電氣線路主回路。
該研究基于人機(jī)交互技術(shù),可以通過人機(jī)界面與PLC進(jìn)行信息交互,實(shí)現(xiàn)線路仿真與設(shè)備聯(lián)動(dòng)功能。為了更加方便學(xué)生實(shí)訓(xùn)和教師教學(xué)演示,電力拖動(dòng)線路實(shí)訓(xùn)用到的按鈕、行程開關(guān)、熱繼電器輔助觸點(diǎn)、線路動(dòng)作反饋信號(hào)、傳感器信號(hào)等輸入信號(hào)接到PLC輸入端,實(shí)現(xiàn)近端實(shí)訓(xùn)設(shè)備、實(shí)訓(xùn)線路控制、遠(yuǎn)端設(shè)備控制和狀態(tài)監(jiān)測(cè)。電氣控制主回路中的交流接觸器KM1~KM7線圈接PLC的Y0~Y6輸出,用于電氣故障設(shè)置的中間繼電器KA1~KA9連接到PLC的Y7、Y10~Y17 。變頻器E740分別連接到PLC的Y20~Y24,可以利用PLC實(shí)現(xiàn)電動(dòng)機(jī)的多段速控制。
(四)PLC程序設(shè)計(jì)
該設(shè)計(jì)下位機(jī)控制部分與上位機(jī)仿真軟件間控制信息的傳遞靠PLC的寄存器與MCGS組態(tài)中的動(dòng)態(tài)數(shù)據(jù)庫(kù)建立起的通道。因此,PLC與上位機(jī)的通訊程序不需要特殊編制。所有電氣控制線路的PLC程序采用子程序的方式,通過上位機(jī)選擇需要聯(lián)動(dòng)的設(shè)備,選擇電氣線路后,對(duì)應(yīng)設(shè)備的下位機(jī)PLC調(diào)用對(duì)應(yīng)的PLC子程序,從而實(shí)現(xiàn)上位機(jī)仿真軟件與下位機(jī)設(shè)備之間的聯(lián)動(dòng)。
三、上位機(jī)仿真軟件設(shè)計(jì)
(一)MCGS組態(tài)軟件介紹
MCGS(Monitor and Control Generated System)是一套基于Windows平臺(tái)的用于快速構(gòu)造和生成上位機(jī)監(jiān)控系統(tǒng)的組態(tài)軟件系統(tǒng)。 MCGS為用戶提供了解決實(shí)際工程問題的完整方案和開發(fā)平臺(tái),能夠完成現(xiàn)場(chǎng)數(shù)據(jù)采集、實(shí)時(shí)和歷史數(shù)據(jù)處理、報(bào)警和安全機(jī)制、流程控制、動(dòng)畫顯示、趨勢(shì)曲線和報(bào)表輸出以及企業(yè)監(jiān)控網(wǎng)絡(luò)等功能。
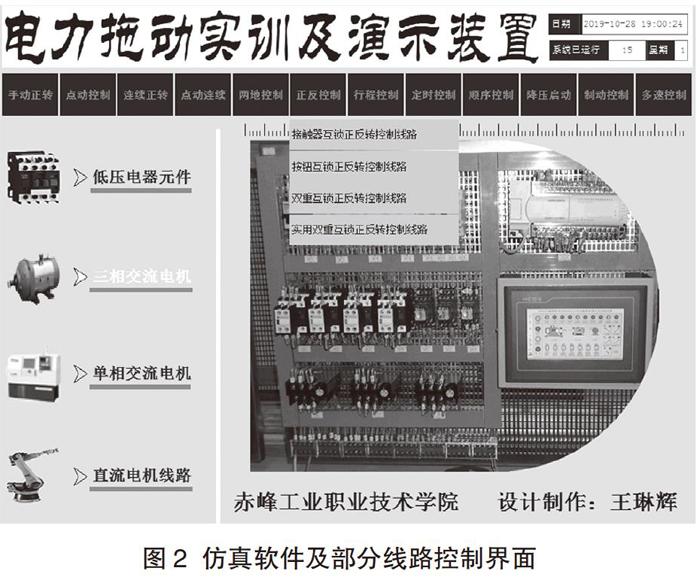
(二)軟件界面及菜單結(jié)構(gòu)設(shè)計(jì)
采用三級(jí)菜單結(jié)構(gòu)設(shè)計(jì),第一級(jí)主菜單,第二級(jí)、第三級(jí)菜單在首頁(yè)也可直接進(jìn)行訪問。軟件中每一個(gè)電氣線路均為一個(gè)獨(dú)立的窗口,點(diǎn)擊線路菜單則跳轉(zhuǎn)到對(duì)應(yīng)的線路窗口,并關(guān)閉當(dāng)前窗口。同時(shí),所有的變量均會(huì)復(fù)位。軟件主界面及部分控制界面如圖2所示。
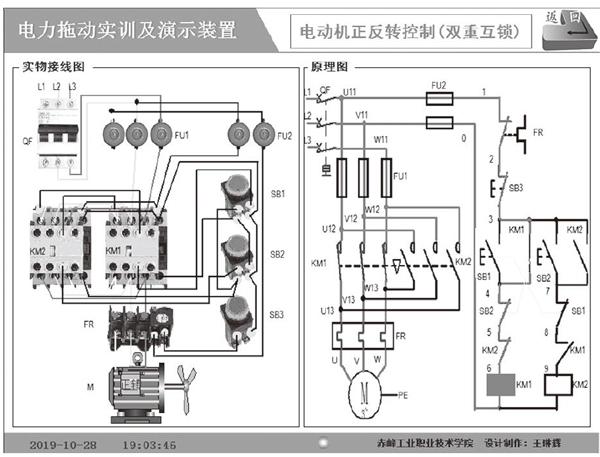
(三)軟件電路仿真、控制功能設(shè)計(jì)
每一個(gè)線路圖均包含有實(shí)物接線圖和原理圖,其中圖中的每一個(gè)元器件、每一個(gè)元器件符號(hào)均是一個(gè)多位開關(guān)或多位動(dòng)畫組件,當(dāng)點(diǎn)擊相關(guān)的元器件或元器件符號(hào)時(shí),根據(jù)電路腳本程序所編寫的邏輯關(guān)系,相關(guān)變量發(fā)生變化,與變量通過設(shè)備通道連接的PLC寄存器將發(fā)出相應(yīng)的動(dòng)作,與對(duì)應(yīng)PLC的Y寄存器輸出端子相連的繼電器將發(fā)生動(dòng)作,從而實(shí)現(xiàn)了電路邏輯仿真動(dòng)畫與實(shí)訓(xùn)設(shè)備實(shí)物聯(lián)動(dòng)的效果。同時(shí),通過合分和按壓實(shí)訓(xùn)設(shè)備上的開關(guān)、按鈕,PLC的對(duì)應(yīng)輸入端子有輸入,根據(jù)PLC程序,PLC的輸出也將發(fā)生變化,與之相連接的上位機(jī)仿真軟件的變量將根據(jù)腳本程序的邏輯發(fā)生變化,帶動(dòng)仿真軟件上的電路動(dòng)畫動(dòng)作,從而真正做到了仿真軟件與實(shí)訓(xùn)設(shè)備實(shí)物的聯(lián)動(dòng)。
現(xiàn)以電力拖動(dòng)雙重互鎖正反轉(zhuǎn)控制線路為例,腳本程序如下所示:
//電動(dòng)機(jī)正轉(zhuǎn)啟動(dòng)程序
if QF_M130=1 and SB1_M101=1 and SB2_M102=0 and FR3=0 then
KM6=1
KM7=0
SB2_M102_XS=2
FR3_XS=1
SB2_XS=2
SB1_XS=0
KM6_XS=1
KM7_XS=2
Endif
//電動(dòng)機(jī)反轉(zhuǎn)啟動(dòng)程序
if QF_M130=1 and SB3_M103=1 and SB2_M102=0 and FR3=0 then
KM7=1
KM6=0
SB2_M102_XS=2
FR3_XS=1
SB1_XS=2
SB2_XS=0
KM6_XS=2
KM7_XS=1
endif
//電動(dòng)機(jī)停轉(zhuǎn)程序
if QF_M130=0 or SB2_M102=1 or FR3=1 then
KM6=0
KM7=0
SB2_M102_XS=0
KM6_XS=0
KM7_XS=0
SB1_XS=0
SB2_XS=0
endif
//熱繼電器動(dòng)作程序
if FR3=1 then
FR3_XS=2
endif
if FR3=0 and KM6=1 or KM7=1 then
FR3_XS=1
endif
if FR3=0 and KM6=0 and KM7=0 then
FR3_XS=0
endif
//SB1 ,SB3 組件顯示邏輯程序
if SB1_M101=1 then
SB1_XS=1
endif
if SB1_M101=0 then
if KM7=0 then
SB1_XS=0
endif
if KM7=1 then
SB1_XS=2
endif
endif
if SB3_M103=1 then
SB2_XS=1
endif
if SB3_M103=0 then
if KM6=0 then
SB2_XS=0
endif
if KM6=1 then
SB2_XS=2
endif
endif
//SB2組件顯示邏輯程序
if SB2_M102=1 then
SB2_M102_XS=1
endif
if SB2_M102=0 then
if KM6=1 or KM7=1 then
SB2_M102_XS=2
endif
if KM6=0 and KM7 =0 then
SB2_M102_XS=0
endif
endif
//電動(dòng)機(jī)M組件正轉(zhuǎn)動(dòng)畫顯示邏輯程序
if KM6=1 or KM7=1 then
M3=1
else
M3=0
endif
if KM1=1 or KM6=1 or KM3=1 then
D1=1? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?//顯示:正轉(zhuǎn)
旋轉(zhuǎn)可見度=1-旋轉(zhuǎn)可見度
if M3_XS<7 then
M3_XS=M3_XS+1
else
M3_XS=0
endif
endif
//電動(dòng)機(jī)M組件反轉(zhuǎn)動(dòng)畫顯示邏輯程序
if KM7=1 then
D1=2? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?//顯示:反轉(zhuǎn)
旋轉(zhuǎn)可見度=1-旋轉(zhuǎn)可見度
if M3_XS>0 and M3_XS<=7 then
M3_XS=M3_XS-1
endif
if M3_XS<=0 then
M3_XS=7
endif
endif
if KM1=0? AND KM6=0 and KM7=0 AND KM3=0 then
D1=3? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?//顯示:停轉(zhuǎn)
Endif
四、 結(jié)束語(yǔ)
本研究在考慮了人機(jī)工程學(xué)的基礎(chǔ)上,對(duì)基于RS485轉(zhuǎn)串口、以太網(wǎng)通訊的模式的下位機(jī)實(shí)訓(xùn)裝置的本體進(jìn)行了設(shè)計(jì)與實(shí)現(xiàn),同時(shí)進(jìn)行了電路以及PLC程序的設(shè)計(jì),基本實(shí)現(xiàn)了對(duì)下位機(jī)的控制性能。同時(shí)針對(duì)上位機(jī)的開發(fā)目標(biāo),基于MCGS組態(tài)軟件詳細(xì)設(shè)計(jì)并實(shí)現(xiàn)了電力拖動(dòng)的線路仿真,并通過該上位機(jī)仿真軟件與下位機(jī)實(shí)訓(xùn)裝置硬件終端人機(jī)界面采用線纜或以太網(wǎng)的方式進(jìn)行連接測(cè)試。測(cè)試結(jié)果表明,本研究正確有效,應(yīng)用于本學(xué)院電力拖動(dòng)實(shí)訓(xùn)課,取得了良好的教學(xué)效果,得到了師生的好評(píng)。
參考文獻(xiàn):
[1]胡兵.基于MCGS和PLC的虛實(shí)結(jié)合實(shí)驗(yàn)?zāi)P驮O(shè)計(jì)與實(shí)現(xiàn)[J].電子設(shè)計(jì)工程,2018,(3).
[2]卞秀輝.基于MCGS模擬仿真PLC實(shí)訓(xùn)設(shè)備的設(shè)計(jì)[J].寧波職業(yè)技術(shù)學(xué)院學(xué)報(bào),2017,(8).
[3] 陳長(zhǎng)全.虛擬仿真實(shí)訓(xùn)平臺(tái)的研究與設(shè)計(jì)[J].電子世界,2018,(9).
[4] 孫式運(yùn),楊清志.MCGS組態(tài)控制技術(shù)在PLC項(xiàng)目教學(xué)中的應(yīng)用[J].遼寧科技學(xué)院學(xué)報(bào),2017,(10).
[5] 孫立新,徐良君,楊東宇,董玉召.基于MCGS的三維動(dòng)態(tài)仿真系統(tǒng)開發(fā)[J].機(jī)械設(shè)計(jì)與制造,2017,(10).
