基于雙目視覺的固定翼無人機(jī)自主著陸技術(shù)研究
2019-12-03 02:07:42馬曉東高帥華
兵器裝備工程學(xué)報(bào) 2019年11期
馬曉東,呂 昊,張 杰,高帥華
(中國飛行試驗(yàn)研究院,西安 710089)
近年來,基于視覺傳感器的無人機(jī)自主著陸技術(shù)作為其智能化、自主化研究中的重要環(huán)節(jié),受到廣泛關(guān)注[1]。當(dāng)前將視覺傳感器運(yùn)用于無人機(jī)自主著陸中的多是旋翼機(jī)。由于其可近距離飛行、慢速垂直起降,能獲得清晰的圖像,故多是利用合作地標(biāo),設(shè)計(jì)算法對其進(jìn)行識別、跟蹤及相對位姿解算用于著陸導(dǎo)航[2-4]。該方法實(shí)時性較強(qiáng)、導(dǎo)航精度較高,故研究與應(yīng)用較為廣泛。而固定翼無人機(jī)由于飛行速度較快、著陸位置較為固定(多為跑道)、且進(jìn)入著陸狀態(tài)是距離著陸點(diǎn)較遠(yuǎn),多是通過檢測和跟蹤跑道、識別地平線等方法實(shí)現(xiàn)無人機(jī)自主著陸[5-6]。但該方案無法得到較為全面的導(dǎo)航信息,且實(shí)時性較差、精度較低,無法滿足固定翼無人機(jī)自主著陸需求。
基于上述研究基礎(chǔ),結(jié)合旋翼機(jī)利用合作地標(biāo)自主著陸的優(yōu)勢,利用由兩個視覺傳感器構(gòu)成的雙目視覺系統(tǒng)設(shè)計(jì)一套固定翼無人機(jī)自主著陸導(dǎo)航方法,通過對無人機(jī)著陸過程分析,設(shè)計(jì)地標(biāo)形狀并確定擺放方式,方便機(jī)載雙目視覺系統(tǒng)對著陸地標(biāo)進(jìn)行檢測識別與跟蹤,并提取關(guān)鍵特征角點(diǎn)用于相對位姿估算,并進(jìn)行雙目融合以提高精度。
1 系統(tǒng)總覽
1.1 合作地標(biāo)設(shè)計(jì)
固定翼無人機(jī)降落過程分為:進(jìn)場平飛→下滑→拉平→滑行[6],整個降落過程飛機(jī)對準(zhǔn)跑道飛行,僅在高度方向變化快速,其他方向位移變化不大。基于此特點(diǎn),確定合作目標(biāo)形狀及擺放方式如圖1所示。地標(biāo)垂直地面、面向無人機(jī)進(jìn)場方向放置,保證著陸過程中地標(biāo)始終在視場內(nèi),且仿射變換較小,從而方便無人機(jī)識別跟蹤與三維信息解算。

圖1 合作目標(biāo)擺放方式示意圖
1.2 著陸流程設(shè)計(jì)
視覺導(dǎo)航算法的工作流程如圖2所示,主要包括目標(biāo)檢測識別、目標(biāo)跟蹤以及相對位姿解算3部分。
2 合作地標(biāo)檢測識別
2.1 目標(biāo)檢測
目標(biāo)檢測主要包括兩部分:圖像預(yù)處理包括濾波、分割、邊緣檢測及輪廓提取,在去除噪聲等干擾之外,提取包括目標(biāo)的“疑似目標(biāo)”輪廓集;基于合作地標(biāo)圖案外圓輪廓特點(diǎn)設(shè)置閾值條件進(jìn)行初步篩選。如圖3所示,圓形地標(biāo)成像時由于拍攝角度的變化,會畸變?yōu)轭悪E圓形;用矩形邊框逼近,會存在如下特點(diǎn):橢圓在矩形框中所占面積較大,且橢圓中心與矩形中心距離較近。

圖2 視覺導(dǎo)引自主著陸工作流程框圖

圖3 目標(biāo)輪廓與其逼近矩形框關(guān)系示意圖
基于上述特點(diǎn),設(shè)計(jì)篩選閾值條件如式(1)所示:
(1)
式(1)中:SL、OL分別為閉合輪廓面積與中心,||OL-OB||表示兩中心點(diǎn)的歐式距離,T1、T2則為所設(shè)閾值。
2.2 目標(biāo)識別
2.2.1SURF-BoW特征提取
SURF是一種尺度、旋轉(zhuǎn)不變的檢測與描述方法,具備重復(fù)性、特異性及魯棒性優(yōu)點(diǎn)[7]。而BoW是文本信息檢索與分類領(lǐng)域中常用描述方法,用于圖像分類領(lǐng)域時,將二維像素信息映射為視覺詞匯向量,在保持圖像局部特征的同時對圖像信息進(jìn)行有效壓縮[8]。結(jié)合兩者優(yōu)勢,提取SURF-BoW特征用于分類器的訓(xùn)練。提取方法步驟如下:
步驟1:樣本圖像統(tǒng)一尺寸為256×256,并進(jìn)行預(yù)處理;
步驟2:對預(yù)處理后的樣本圖像進(jìn)行網(wǎng)格稠密采樣,使用的網(wǎng)格采樣間隔是32像素;
步驟3:在每個網(wǎng)格區(qū)域內(nèi)計(jì)算SURF特征得到一個64維的特征向量,每幅樣本圖像可得到一個64×64的SURF特征向量集合;
步驟4:使用K-means均值聚類算法對訓(xùn)練圖像集上所有的SURF特征進(jìn)行聚類,每個聚類中心對應(yīng)一個視覺單詞,從而生成一個由n個視覺單詞構(gòu)成的視覺單詞表;
步驟5:對樣本圖像提取出的特征進(jìn)行向量化,即用網(wǎng)格采樣點(diǎn)的SURF特征與視覺單詞表中的每個視覺單詞所對應(yīng)的SURF特征進(jìn)行比較,從而找出最相近的視覺單詞來表示網(wǎng)格采樣點(diǎn)周圍區(qū)域;
步驟6:統(tǒng)計(jì)每一幅目標(biāo)圖像中各個視覺單詞出現(xiàn)頻率,并得到一個長度為視覺單詞字典大小的詞頻向量,從而構(gòu)建每幅目標(biāo)圖像的SURF-BoW特征。
2.2.2SVM分類器

f(x)=wTx+b
(2)
本文樣本數(shù)據(jù)為非線性,對于只能對線性數(shù)據(jù)進(jìn)行分類的SVM,需引入非線性核函數(shù)將低維線性數(shù)據(jù)轉(zhuǎn)化到高維特征空間,使其線性可分。本文所用核函數(shù)為高斯核函數(shù):
(3)
通過非線性高斯核函數(shù)轉(zhuǎn)換,最終分類器定義函數(shù)表示為:
(4)
此次研究選取了1 200個正樣本圖像和1 396個負(fù)樣本用于線下SVM分類器訓(xùn)練。其中正樣本為不同角度、畸變、亮度、模糊等各種情況下的地標(biāo)圖像,負(fù)樣本為具體場景下的周遭干擾目標(biāo)識別的物體或環(huán)境圖像。
3 合作地標(biāo)跟蹤
為提高跟蹤實(shí)時性,本文以網(wǎng)格采樣初始化后的跟蹤點(diǎn)代替目標(biāo),利用跟蹤器進(jìn)行跟蹤與性能檢測和篩選,以篩選后的跟蹤點(diǎn)所在最小矩形框區(qū)域?yàn)楦櫟降哪繕?biāo)圖像。目標(biāo)跟蹤點(diǎn)初始化與跟蹤如圖4所示。
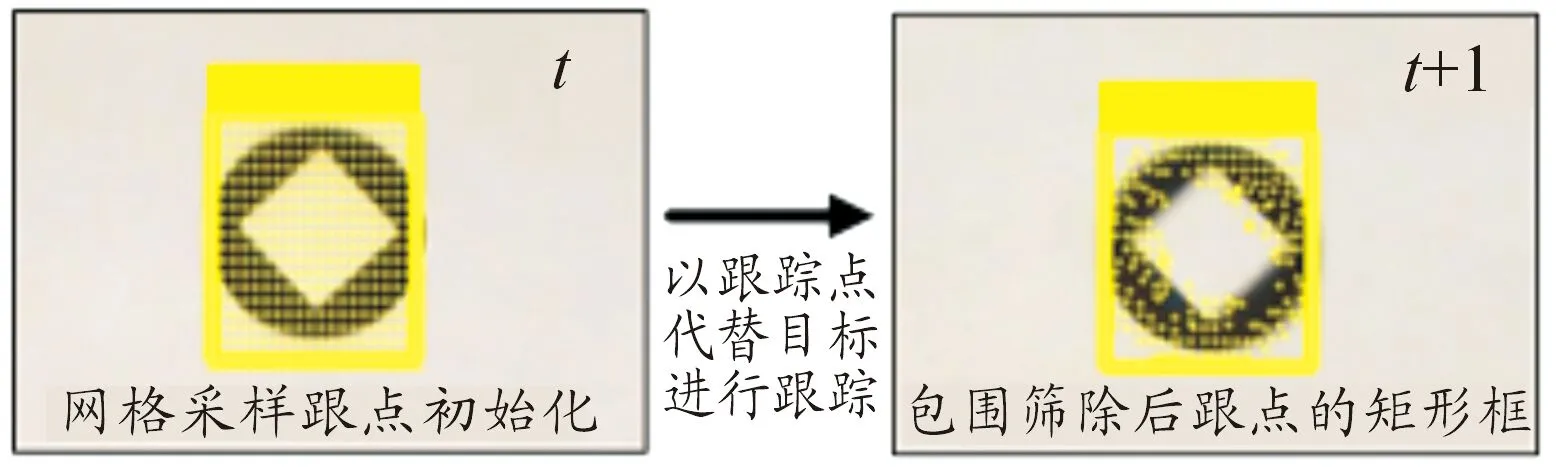
圖4 目標(biāo)跟蹤點(diǎn)初始化與跟蹤示意圖
3.1 改進(jìn)的金字塔L-K光流法
金字塔L-K光流法是在L-K光流法[9]基礎(chǔ)上改進(jìn)而來,通過引入金字塔降采樣空間,改善原算法對目標(biāo)移動過快跟蹤效果差的缺陷[10]。但其面對模糊、光照變化等情況,跟蹤效果仍無法滿足需求。本文采用前后跟蹤誤差與相鄰幀局部區(qū)域圖像相似性約束對其進(jìn)行改進(jìn),并設(shè)計(jì)目標(biāo)跟蹤失敗再搜索算法,保證跟蹤系統(tǒng)的準(zhǔn)確、穩(wěn)定與連續(xù)。
3.1.1前后雙向跟蹤誤差


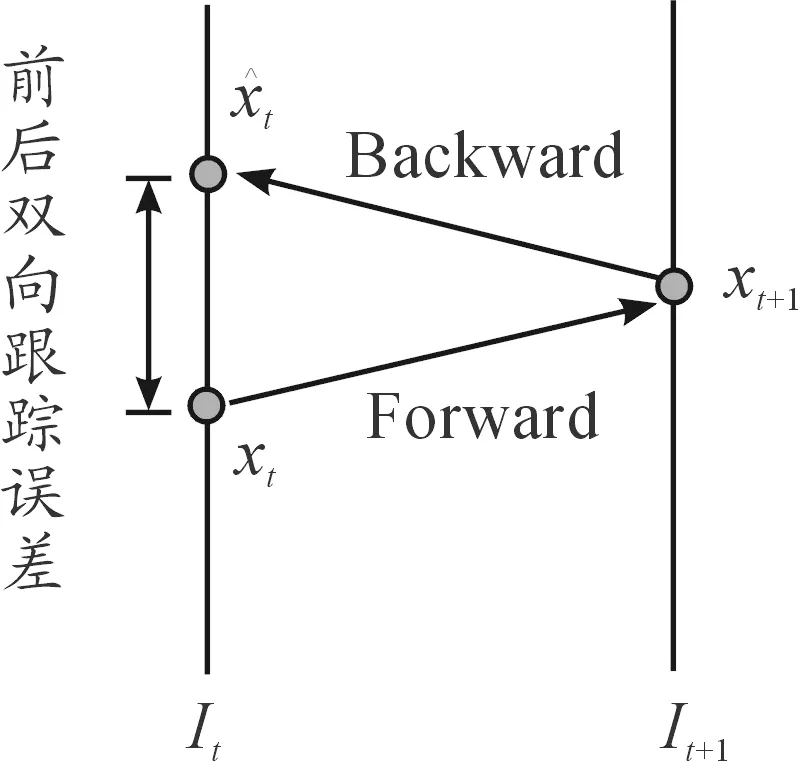
圖5 前后跟蹤誤差
3.1.2相鄰幀局部圖像相似性約束
本文以金字塔K-L光流法為核心對跟蹤點(diǎn)進(jìn)行跟蹤,相鄰幀之間由于時間間隔較短,局部區(qū)域圖像應(yīng)相似。基于此特性,分別以t時刻跟蹤點(diǎn)xt與t+1時刻對應(yīng)點(diǎn)xt+1為中心,截取10px×10px大小的區(qū)域圖像,進(jìn)行歸一化相關(guān)系數(shù)匹配,其結(jié)果越大,表明兩者越相似,該跟蹤點(diǎn)跟蹤性能越好。歸一化相關(guān)系數(shù)法原理式:
其中T(x,y)、I(x,y)分別為圖像T、I中點(diǎn)(x,y)的灰度。
基于該方法與3.1.1中的前后跟蹤誤差設(shè)置跟蹤點(diǎn)跟蹤性能約束條件如式(5)所示,當(dāng)跟蹤點(diǎn)滿足式(5),則認(rèn)為其跟蹤性能較好,反之,則篩除。
(5)
式(5)中,i表示第i個跟蹤點(diǎn),F(xiàn)BT、NCCT皆為設(shè)定閾值。經(jīng)多次試驗(yàn),當(dāng)FBT=5、NCCT=0.7算法效果最佳。
為了保證跟蹤目標(biāo)的準(zhǔn)確性與完整性,在基于約束條件篩除跟蹤性能較差的跟蹤點(diǎn),得到跟蹤目標(biāo)之后,以上幀目標(biāo)為模板與本幀目標(biāo)進(jìn)行歸一化相關(guān)系數(shù)匹配,得到匹配結(jié)果NCCL,若NCCL≥T,則認(rèn)為跟蹤成功,反之,則認(rèn)為跟蹤失敗。經(jīng)多次試驗(yàn),T取0.7時,算法性能最好。
3.1.3跟蹤失敗后目標(biāo)再搜索
跟蹤失敗后存在兩種情況:目標(biāo)不再視場內(nèi);目標(biāo)仍在視場內(nèi)。對于第2種情況,若直接采用SVM分類器進(jìn)行目標(biāo)識別,會增加算法的時間復(fù)雜度。故本文設(shè)計(jì)目標(biāo)再搜索方法,從而在目標(biāo)跟蹤失敗后仍能快速找到目標(biāo)。
首先,利用相鄰兩幀間隔時間較短、目標(biāo)位移尺度變化較小的特點(diǎn),以上幀目標(biāo)中心為本幀搜索區(qū)域中心,搜索區(qū)域長高為上幀目標(biāo)長高的3倍,確定目標(biāo)再搜索區(qū)域。之后在搜索區(qū)域內(nèi)重新進(jìn)行目標(biāo)檢測得到“疑似目標(biāo)”圖像集。最后,以上一幀目標(biāo)圖像為模板,與“疑似目標(biāo)”圖像集中所有圖像統(tǒng)一尺度,并進(jìn)行歸一化相關(guān)系數(shù)匹配。取其中相關(guān)系數(shù)最大且大于0.7的“疑似目標(biāo)”圖像為本幀再搜索到的目標(biāo);若均小于0.7,則利用SVM分類器精確識別目標(biāo)。
3.2 跟蹤算法性能測試與結(jié)果分析
以本文跟蹤算法與金字塔L-K光流法及以L-K光流法為核心的經(jīng)典自學(xué)習(xí)實(shí)時跟蹤算法TLD算法進(jìn)行跟蹤性能對比分析。測試視頻有三組,并采用兩種度量手段評估性能:一是每幀平均處理時間;二是跟蹤誤差,可用下式表示:
(Gx,Gy)與(Tx,Ty)分別為跟蹤到的目標(biāo)所在矩形框與真實(shí)目標(biāo)所在矩形框中心坐標(biāo)。
算法運(yùn)行后,結(jié)果可見表1、圖6與圖7。經(jīng)對比可得,本文跟蹤算法實(shí)時性較好,可達(dá)30 fps;且其目標(biāo)跟蹤誤差不超過5個像素,相比金字塔L-K光流法與TLD算法,目標(biāo)跟蹤準(zhǔn)確性較好。而由圖7可明顯看出,本文所設(shè)計(jì)跟蹤算法跟蹤到的目標(biāo)相對于TLD與金字塔L-K光流法來說,較為完整,且在光照較強(qiáng)、圖像模糊時仍能跟蹤到目標(biāo),表明本文跟蹤算法穩(wěn)定性、連續(xù)性較好。

表1 每幀平均處理時間

圖6 跟蹤誤差結(jié)果曲線
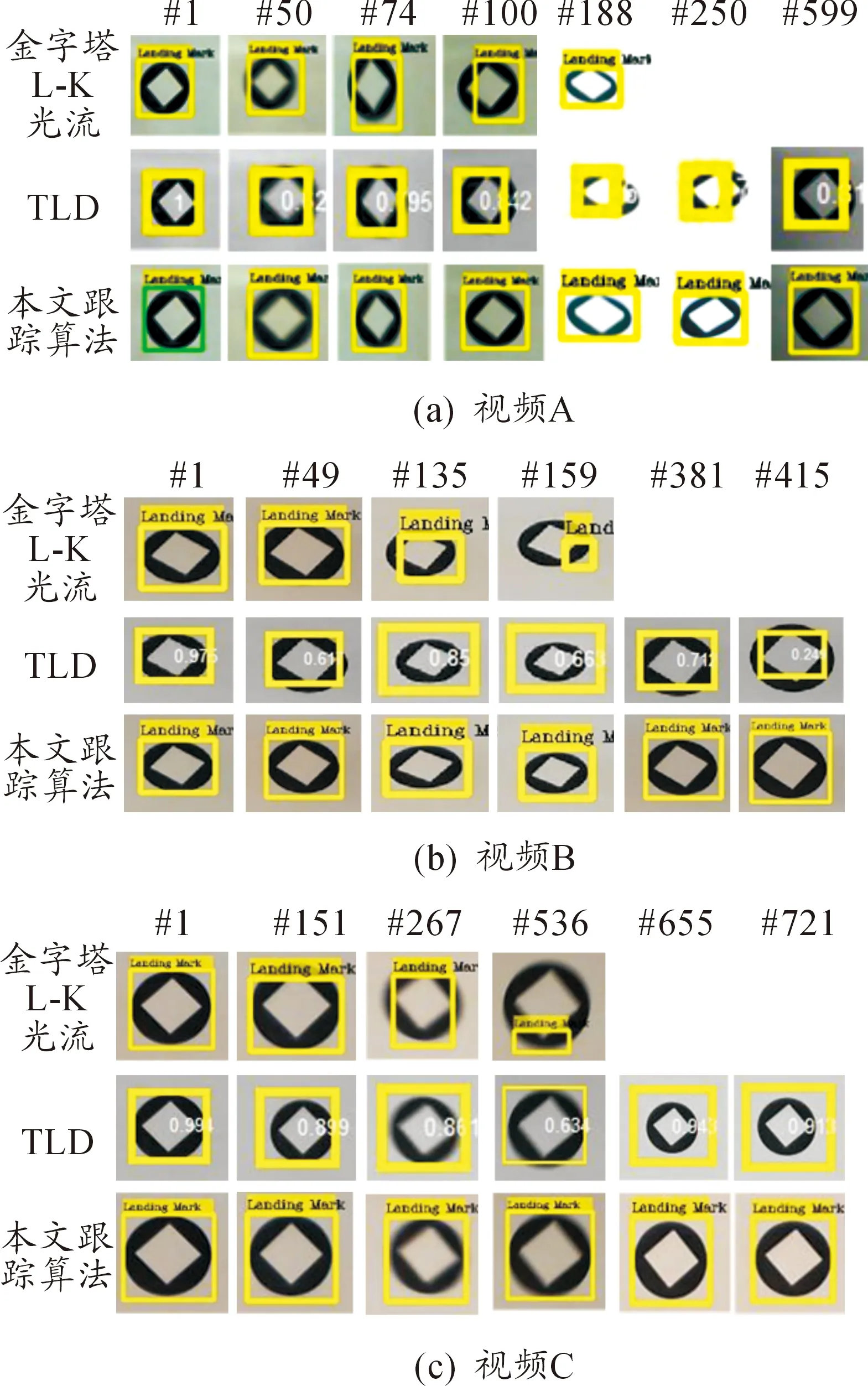
圖7 部分跟蹤結(jié)果示意圖
4 無人機(jī)相對位姿估計(jì)
Shi-Tomasi算子作為Harris算子的改進(jìn)算法,利用梯度矩陣的特征值進(jìn)行強(qiáng)角點(diǎn)判定,可有效避免角點(diǎn)聚簇,故本文選取Shi-Tomasi算子來提取角點(diǎn)。但其提取到的角點(diǎn)為像素級角點(diǎn),為提高角點(diǎn)檢測精度,本文在利用Shi-Tomasi算子提取到角點(diǎn)后,對其進(jìn)行亞像素級優(yōu)化,以提高精度。如圖8所示。
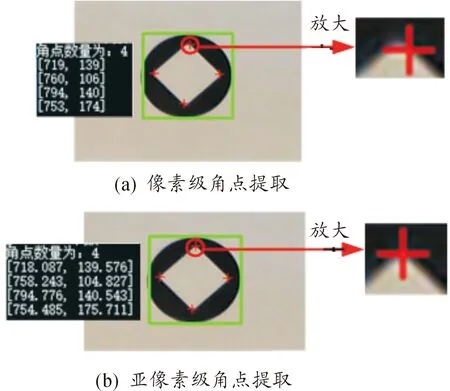
圖8 角點(diǎn)亞像素級優(yōu)化
4.1 基于透視投影理論的相對位姿估計(jì)
假設(shè)世界坐標(biāo)系下某一點(diǎn)P(xWi,ywi,zwi)在像平面內(nèi)對應(yīng)點(diǎn)為p(ui,vi),基于透視投影成像原理,可得:
其中f、dx、dy、u0,、v0為攝像機(jī)內(nèi)參,可由標(biāo)定所得;Zc為點(diǎn)P與光心之間的距離;R、T分別為攝像機(jī)坐標(biāo)系相對于世界坐標(biāo)系的旋轉(zhuǎn)矩陣與平移向量。T可表示為T=(tx,ty,tz)T,而R可用下式表示:
其中,攝像機(jī)坐標(biāo)系繞OX軸的旋轉(zhuǎn)角度為φ,繞OY軸的旋轉(zhuǎn)角度為θ,繞OZ軸的的旋轉(zhuǎn)角度為ψ。
給定4組共面的空間點(diǎn)世界坐標(biāo)及其對應(yīng)像點(diǎn)像素坐標(biāo),若攝像機(jī)參數(shù)已知,基于文獻(xiàn)[11]中關(guān)于P4P問題求解方法可知,R、T可唯一確定。若已知目標(biāo)標(biāo)志中心世界坐標(biāo)為(xo,yo,zo),可得攝像機(jī)在世界坐標(biāo)系下的坐標(biāo)為(xo+tx,yo+ty,zo+tz),相對姿態(tài)為:φ=-arcsin(r13),ψ=arcsin(r12/cosφ),θ=arcsin(r23/cosφ)。

(φ,ψ,θ)=((φl+φr)/2,(ψl+ψr)/2,(θl+θr)/2)
4.2 算法測試結(jié)果與分析
以Vega Prime、Creater視景仿真軟件進(jìn)行雙目視景仿真,并利用仿真圖像進(jìn)行算法性能測試。仿真所用的雙目攝像機(jī)模型如圖9(a)所示,設(shè)置光心之間相距1 m,相機(jī)內(nèi)參為fx=fy=618.038 672、u0=v0=256。仿真視景圖像如圖9(b)所示,分辨率均為512×512。圖中4個特征角點(diǎn)世界坐標(biāo)為(0, -2 828.427 12, 0),(2 828.427 12, 0, 0 ),(0, 2 828.427 12, 0),(-2 828.427 12, 0, 0),單位為mm。

圖9 雙目視景仿真圖像
依據(jù)由近到遠(yuǎn),即Z坐標(biāo)(光軸方向上)從30~150 m,以5 m間隔選取25幀圖像運(yùn)行算法,結(jié)果如圖10所示。
由圖10可知,本文所用位姿估算方法相比于單目視覺位姿估算方法,精度有較大提升。在與目標(biāo)相距30~150 m的距離內(nèi),光軸所在方向的位置估算精度在2 m以內(nèi),其他兩軸的位置估計(jì)精度在120 mm以內(nèi),而姿態(tài)角的估計(jì)精度在1°以內(nèi),該精度滿足固定翼無人機(jī)進(jìn)近段自主著陸需求。
5 結(jié)論
提出了一種基于雙目視覺的固定翼無人機(jī)自主著陸方法。通過對固定翼無人機(jī)自主著陸過程分析,基于易檢測識別、易提取特征用于位姿解算等前提,設(shè)計(jì)合作地標(biāo)形狀并確定擺放方式。利用地標(biāo)輪廓幾何特征及SVM分類器,完成目標(biāo)檢測識別;并利用改進(jìn)金字塔L-K光流法完成目標(biāo)精確跟蹤;提取亞像素關(guān)鍵角點(diǎn)特征,基于透視投影方法完成相對位姿估算,并利用雙目均值融合以提高估算精度。本文算法實(shí)時性、穩(wěn)定性好,可穩(wěn)定準(zhǔn)確的識別、跟蹤目標(biāo),估算精度較高,可滿足固定翼無人機(jī)自主著陸需求。