閾值選擇方法在高光譜圖像目標檢測中的應(yīng)用
2019-12-03 02:14:56關(guān)世豪
兵器裝備工程學(xué)報 2019年11期
李 豪,楊 桄,關(guān)世豪
(空軍航空大學(xué),長春 130022)
高光譜技術(shù)是遙感領(lǐng)域近年來發(fā)展較為迅速的技術(shù)之一,高光譜圖像在傳統(tǒng)圖像的“空間維”的基礎(chǔ)上附加了光譜信息,使其每一像元都對應(yīng)一條光譜曲線[1],可以對其進行更為精細的定量研究。通過對光譜特性的使用,可以從光譜維的角度對高光譜圖像進行相應(yīng)的分析與處理。利用光譜曲線進行目標檢測是高光譜圖像的獨有優(yōu)勢,通過光譜曲線的匹配,可以對一些可見光波段無法檢測出的目標進行識別。高光譜目標檢測的算法有很多,其效果各不相同,但在其中閾值選取的問題上多依據(jù)經(jīng)驗,少有利用嚴密的數(shù)學(xué)公式進行相應(yīng)計算,因此結(jié)果雖能體現(xiàn)出識別的效果,但無法做到合理精準地檢測到正確目標的位置與形狀大小。本文通過研究高光譜圖像目標檢測算法中的閾值選取問題,將傳統(tǒng)圖像分割中的閾值選取方法應(yīng)用在高光譜目標檢測的算法上,并通過實驗驗證結(jié)果的精度與可行性,期望能更進一步地提高高光譜目標檢測的精度與科學(xué)性。
1 研究方法與基礎(chǔ)理論
高光譜目標檢測的基本原理是利用已知物體的光譜曲線與未知的光譜曲線進行對比,根據(jù)其相似性來判斷未知物體的光譜曲線的類別,常見的方法根據(jù)其原理可以分為基于距離的光譜匹配方法[2],包括馬氏距離、歐式距離、巴氏距離等;基于光譜形狀的光譜匹配方法,如光譜角匹配[3]等;基于最大相似系數(shù)的光譜匹配方法,如交叉相關(guān)光譜匹配法[4]等;基于編碼的光譜匹配算法,如二值編碼法等;基于濾波的方法,如匹配濾波法[5]等;此外還有支持向量機[6]、神經(jīng)網(wǎng)絡(luò)法等機器學(xué)習(xí)方法。
傳統(tǒng)意義上圖像分割中的閾值,指的是一個或多個指標,用這個指標對圖像的灰度直方圖進行區(qū)間的劃分,將圖像中灰度值在同一個區(qū)間的像素分割為同一種物體[7]。不同的圖像分割算法中,閾值的表現(xiàn)形式各不相同,但都可以總結(jié)為,通過各個算法的計算,將得到的數(shù)值與設(shè)定的閾值進行比較,以劃分這些數(shù)值所對應(yīng)的元素所屬的類型[8]。
但這些方法多是對灰度值圖像進行分割[9],高光譜圖像由于其特殊性,無法直接采用以上方法進行圖像分割進而實現(xiàn)目標檢測。因此,高光譜圖像目標檢測中,需要首先對高光譜圖像進行降維,將其轉(zhuǎn)化為灰度值圖像。傳統(tǒng)的高光譜圖像的降維方法有主成分分析法、最小/最大自相關(guān)因子分析法、最大噪聲分離等,但這些方法都是盡可能多地將信息集中在前幾個波段以實現(xiàn)數(shù)據(jù)的簡化,而不是專門針對目標檢測進行的算法,利用閾值對降維后的圖像進行分割無法直接得到結(jié)果。因此,需要根據(jù)高光譜目標檢測的原理進行圖像的灰度化,再利用閾值進行圖像分割。
本文的思路是根據(jù)目標檢測的原理進行高光譜圖像的灰度化,將已知的目標的光譜曲線特性與圖像進行比對。將比對的結(jié)果以圖像方式進行顯示,對此圖像進行閾值分割,以得到閾值選取后的高光譜圖像目標檢測結(jié)果。該過程中的閾值的選擇問題,在高光譜目標檢測算法中一直是一個被忽略的研究,多數(shù)研究者在實際操作中利用經(jīng)驗,設(shè)置一個適中的閾值,通過不斷調(diào)整,以使結(jié)果接近真實值,通過結(jié)果判斷算法的合理性。這種人工選取的方法效率低下,得到較為理想的結(jié)果需要大量的重復(fù)性試驗,耗時耗力;對于不同的圖像的最優(yōu)閾值也不相同,閾值不具有遷移性,無法參考使用;且不同的目標檢測算法的閾值意義不同,這也不利于驗證算法的統(tǒng)一性,比較算法的優(yōu)劣性。
在圖像分割領(lǐng)域,閾值選擇的研究卻是一直不斷發(fā)展的,方法也是多種多樣。按照吳一全[10]在2014年的分法,根據(jù)圖像分割閾值選取的分類方式不同,圖像分割閾值選取方法如表1所示。
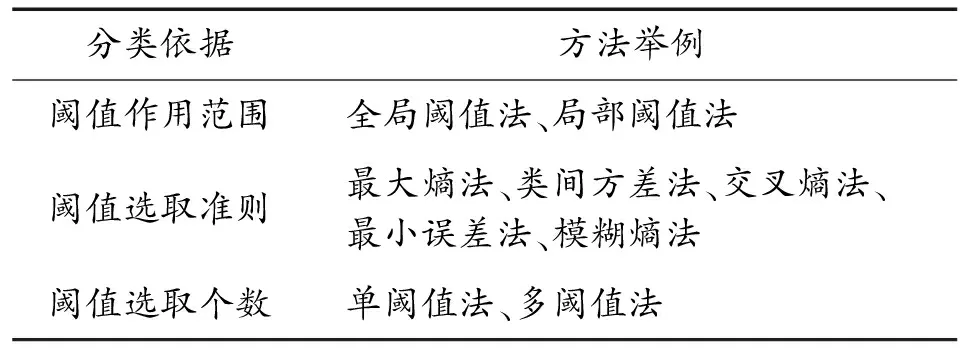
表1 圖像分割閾值選取方法分類
從應(yīng)用的角度來看,高光譜的目標檢測也可以看作是對于灰度值圖像目標分割的一種多維應(yīng)用。因此,通過傳統(tǒng)的圖像分割閾值選取方法可以對高光譜目標檢測提供一些方法與思路。
閾值的選取對高光譜圖像的目標檢測結(jié)果非常重要,但如何評價其檢測結(jié)果目前國際上尚無明確的標準,尤其是專門用來評價高光譜目標檢測閾值選取合理與否的相關(guān)參數(shù)指標很少。傳統(tǒng)的高光譜圖像目標檢測的評價方法有誤差矩陣、總體分類精度、Kappa系數(shù)[11]等,但這些方法多是用來評價算法的分類精度,而不是用來評價算法中所使用的閾值的精確與否;而圖像分割閾值選取的評價方法多為主觀,少數(shù)的定量評價方法的適用性較窄。本文使用了不需要進行閾值選取的高光譜目標檢測算法混合調(diào)諧匹配濾波法Mixture Tuned Matched Filtering (MTMF),利用目視散點圖的方式進行目標的識別,將使用閾值選取方法的結(jié)果與其比較,以判斷結(jié)果的優(yōu)劣性;還采用同種高光譜目標識別的算法,利用不同的閾值選取方法得到的閾值對結(jié)果進行比較,以評價相應(yīng)方法的遷移性與優(yōu)劣性。
2 閾值選擇在高光譜目標檢測中的應(yīng)用
鑒于高光譜圖像目標檢測閾值選擇算法的空白性,圖像分割閾值選取的相關(guān)算法應(yīng)用在高光譜目標檢測中需要進行相應(yīng)的調(diào)整,本文對其處理流程如圖1所示。
第1步:將高光譜圖像按照其目標檢測的方法處理為灰度值圖像。灰度值圖像的形成過程為,對于圖像中的每一個像元,依次計算它與目標光譜之間的光譜特性,將該光譜特性利用像元值表示出來。該圖像表示了光譜特性在影像上的分布情況,像元越暗,說明與最終成分的光譜特性越相似。
第2步:根據(jù)圖像分割閾值選取的方法,對生成的灰度值圖像進行閾值的選取。
第3步:利用此閾值對灰度值圖像進行分割,所得的二值圖即為識別出的目標。
第4步:首先利用混合調(diào)制匹配濾波Mixture Tuned Matched Filtering (MTMF)方法,通過目視識別云圖的方式得到目標識別圖像,作為傳統(tǒng)經(jīng)驗法得到的識別圖像,再比較本文方法與其差別,同時還比較不同閾值選取方法所識別出的目標,并進行相應(yīng)的精度評價。
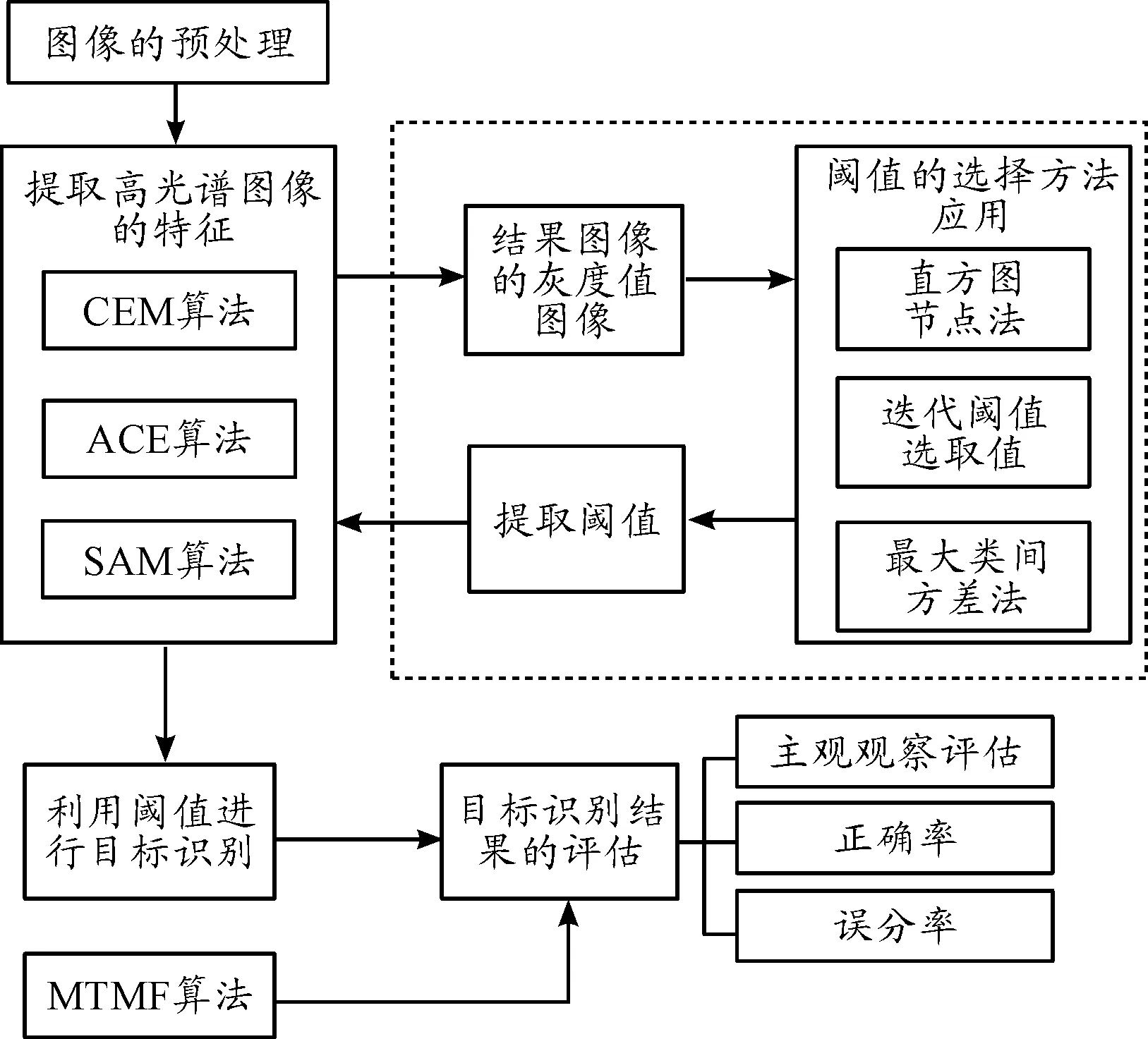
圖1 實驗流程框圖
圖2中虛線所圈部分為采用本文的方法所獲得的,即在傳統(tǒng)的高光譜目標識別的流程中添加了一步進行閾值選取的步驟。

圖2 實驗數(shù)據(jù)圖像
選擇的圖像是一幅偽裝裝甲車的高光譜圖像,該圖像大小為241×896個像素值,包含384個波段,波譜范圍從382~2 500 nm,該圖像已經(jīng)過大氣校正。其中,已知圖中有兩輛裝甲車,一輛在公路上,一輛在密林中,但從可見光圖像上只能看到公路上的裝甲車,圖像情況如圖2所示,圖2中紅色圓圈標記即為公路上的裝甲車,提取公路上的無偽裝裝甲車提供目標光譜曲線,對整幅圖像進行目標檢測。公路上的無偽裝裝甲車所對應(yīng)的像素群的最大值、最小值、平均光譜曲線如圖3所示。
高光譜圖像的目標識別算法我們選用較為常見的幾種算法:約束能量最小化算法(Constrained Energy Minimization,CEM)、自適應(yīng)一致估計算法(Adaptive Coherence Estimator,ACE)、光譜角匹配算法(Spectral Angel Mapper,SAM)。
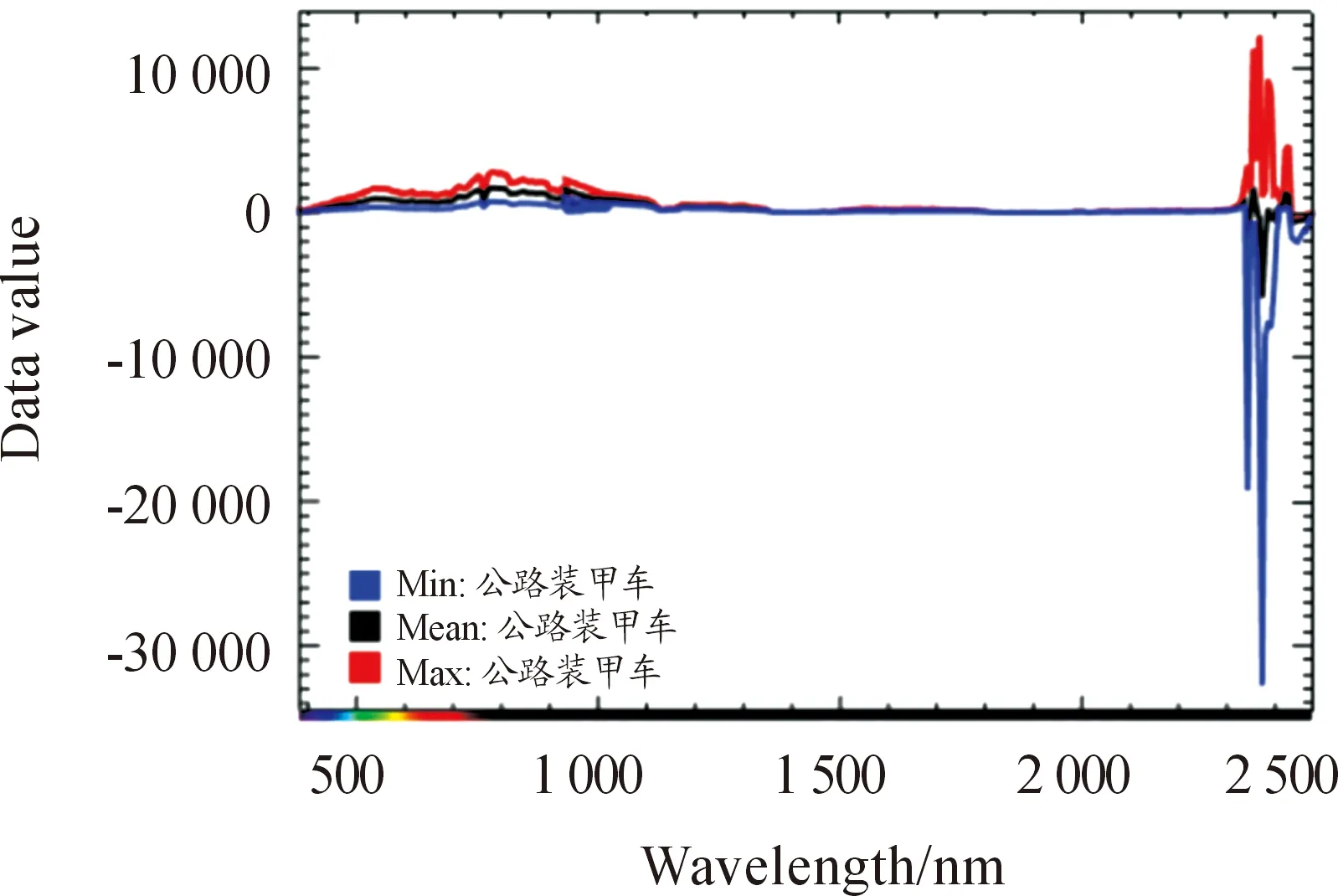
圖3 已知目標的平均光譜曲線
本文使用的閾值選擇方法有:直方圖極點法、迭代閾值選取法、最大類間方差閾值法(Ostu法)。
直方圖極點法,是將灰度圖像的直方圖先進行平滑處理,再進行曲線擬合,在曲線中選擇一階導(dǎo)數(shù)為0且二階導(dǎo)數(shù)大于0的點,即極小值,選用極小值為分割的閾值,當(dāng)直方圖中存在多個極小值時,可以計算極大值,即一階導(dǎo)數(shù)為0且二階導(dǎo)數(shù)小于0的點,綜合考慮極值之間的位置關(guān)系,選擇兩波峰之間的波谷的極小值作為閾值。
迭代閾值選取法則是不斷地選取圖像中的灰度中值作為初值,通過不斷地迭代計算出閾值。其公式如下:
(1)
式中:l表示灰度級的個數(shù);hk表示灰度級為k的個數(shù),迭代終止的條件是閾值收斂到一個穩(wěn)定值。
最大類間方差閾值法,又稱為大津法,是日本學(xué)者大津(Ostu)于1979年提出的。該算法通過灰度級將圖像分為目標與背景兩部分,兩者之間的類間方差越大,說明分類結(jié)果越好。當(dāng)0~i灰度級為圖像的目標像素級時,i~255即為圖像的背景像素級。
g=w0w1(u0-u1)2
(2)

以上所說3種方法是3種不同原理的閾值提取方法,本文不使用那些以分類結(jié)果反推閾值的方法,是因為我們是以合適的閾值求取最好的目標檢測效果,而非以最好的目標檢測效果求取合適的閾值。
由于目標曲線只有1條,分類結(jié)果也只有1種,結(jié)果為一維,因此我們無法使用高光譜圖像分類中較為常見的混合矩陣,也無法使用由此延伸的總體分類系數(shù)與Kappa系數(shù),但根據(jù)其原理,定義了此例中的分類正確率與誤分率。分別表示如下:
(3)
(4)
式(3)為正確率r的定義,u代表識別出的正確像素點個數(shù),a代表實際上的目標像素點個數(shù);式(5)為誤分率w的定義,v代表誤識別出的像素點個數(shù),f代表圖像中非目標中的像素點個數(shù)。
3 實驗結(jié)果分析
目標識別混合調(diào)制匹配濾波Mixture Tuned Matched Filtering (MTMF)方法的點云圖選擇如圖4所示,識別結(jié)果如圖5。

圖4 MTMF點云圖選擇

圖5 MTMF識別結(jié)果
本文3種算法所得到的高光譜圖像灰度值圖像表示如圖6所示,從上向下依次是CEM、ACE、SAM:
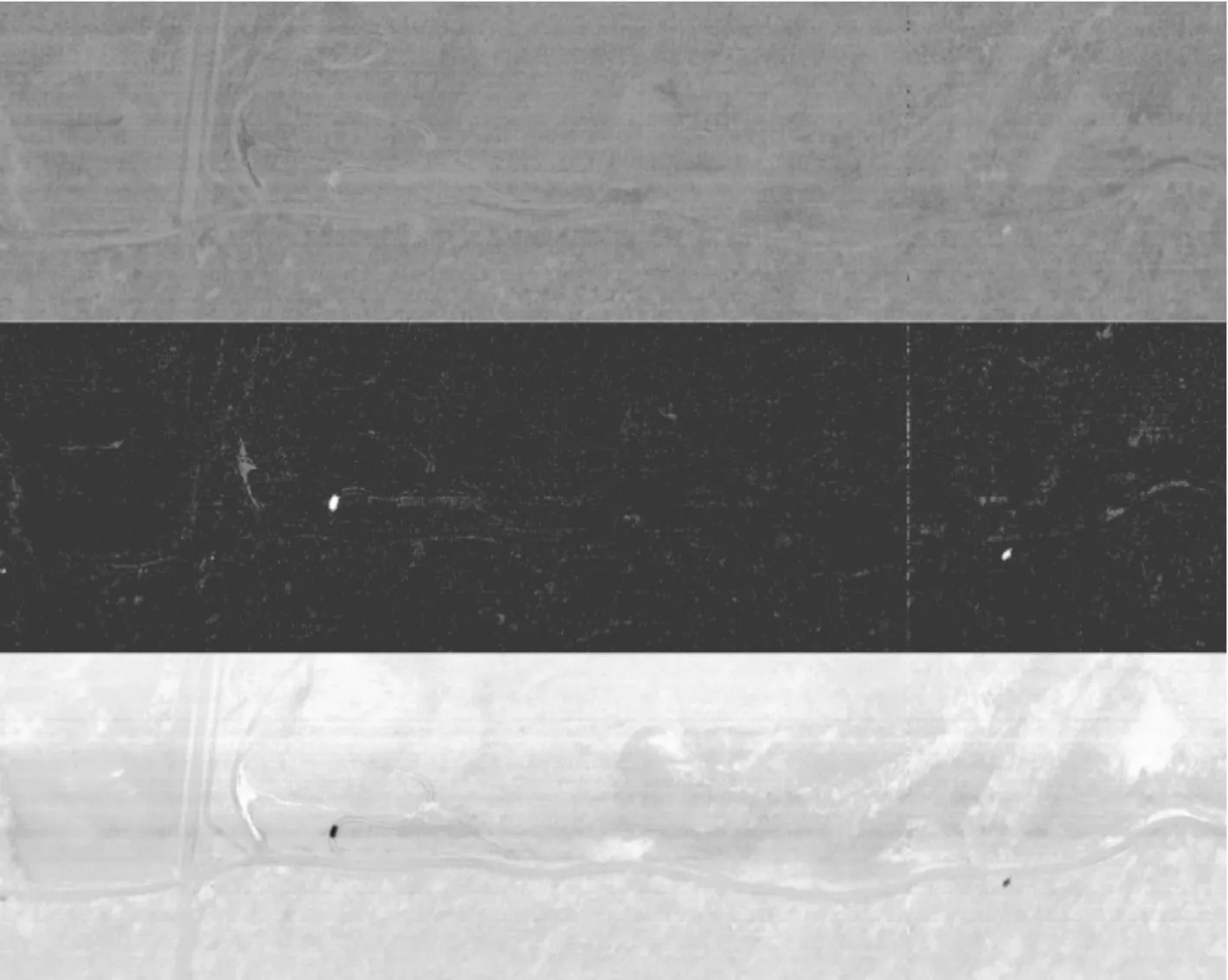
圖6 不同算法的高光譜灰度值圖像結(jié)果
接下來應(yīng)用不同的閾值選取方法對所得到的高光譜圖像灰度值圖像進行閾值計算。得到閾值參數(shù)如表2所示。
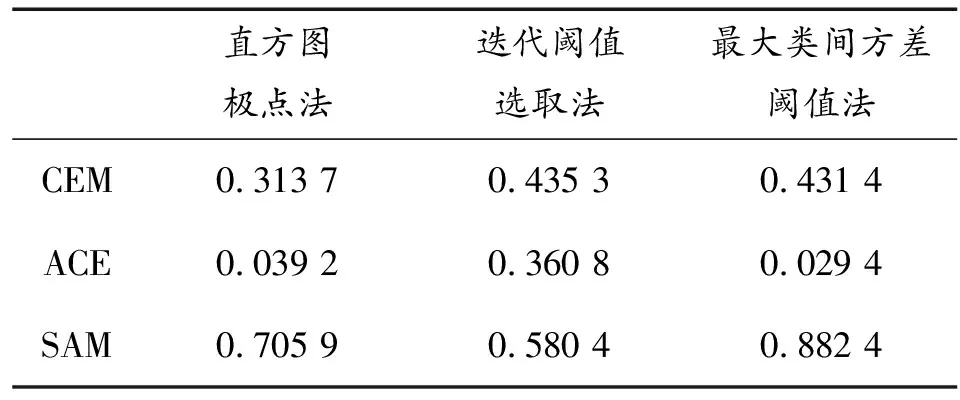
表2 3種閾值選取方法得到的閾值
利用以上參數(shù),對以上不同算法所得到的灰度值圖像進行目標檢測,目標檢測結(jié)果如圖7所示。從圖7(a)到圖7(c)的算法依次為CEM、ACE、SAM算法結(jié)果,每一個圖中從上至下依次是直方圖法、迭代閾值選取法和最大類間方差閾值法的結(jié)果:
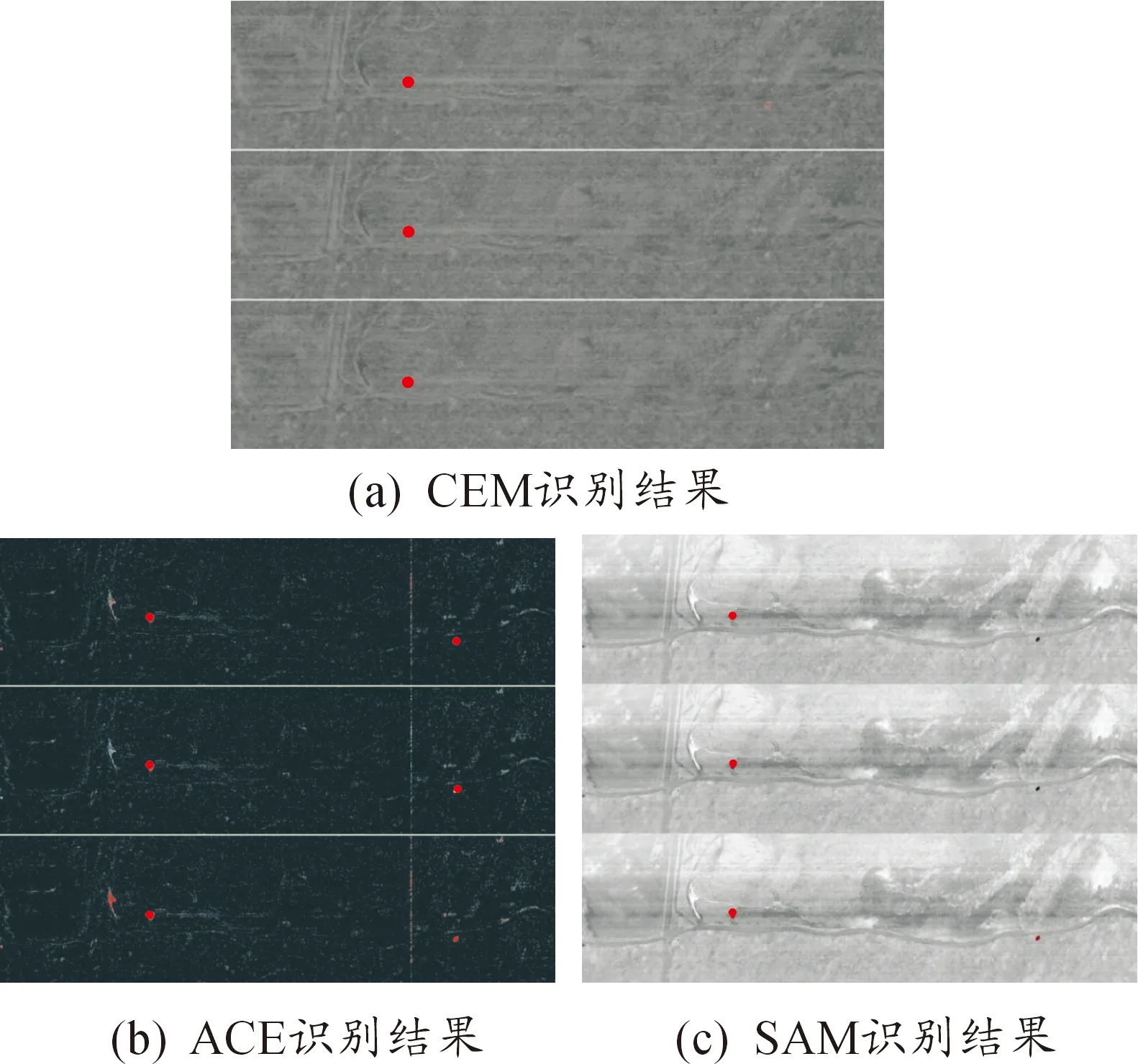
圖7 目標檢測結(jié)果
各算法識別出的目標像素個數(shù)及正誤數(shù)如表3所示,本文前文中定義的正確率和誤分率得到的結(jié)果如表4和表5所示。

表3 實驗結(jié)果像素值統(tǒng)計
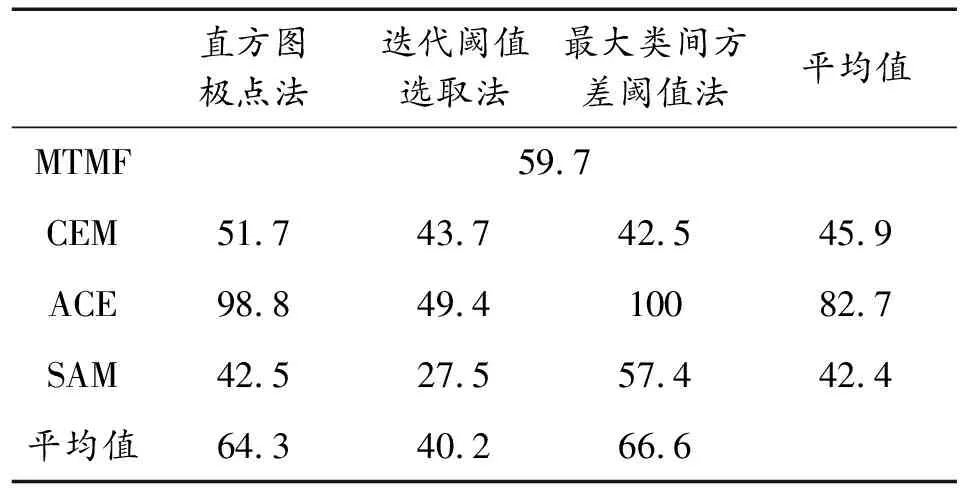
表4 正確率 %
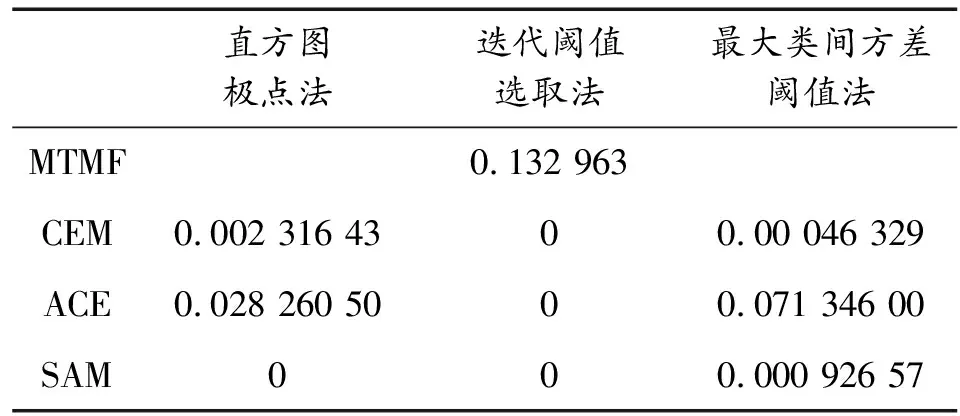
表5 誤分率 %
與傳統(tǒng)依據(jù)經(jīng)驗進行相關(guān)閾值設(shè)定的方法相比,本文的正確率與其相差無幾,但誤分率很低,且都能很好的識別出結(jié)果,說明對閾值提取能夠進一步精確高光譜目標檢測。
本文的3種方法比較,從位置的角度來看,最大類間方差閾值法在ACE算法閾值選擇中誤識別出了許多圖像中部的目標,其他的算法都較為準確地定位到了目標的位置;從識別率的角度看,直方圖極點法和最大類間方差閾值法利用在ACE算法中可以識別出大量的目標像素,識別程度較高,而迭代閾值選取法則識別度較低,可能與其算法容易陷入局部最優(yōu)解有關(guān),但同時,直方圖極點法和最大類間方差閾值法也存在著不同程度的誤分率,從圖像直觀的角度看,當(dāng)使用ACE算法時,都識別出了相當(dāng)于甚至是高于目標像素值的錯誤像素值。總體而言盡管這些結(jié)果有差異,但利用這些方法提取出的閾值都能進行較為準確地識別出目標。
在實際使用中,可以使用迭代閾值選取法對目標進行定位,利用其他兩種方法進一步地準確選擇目標的像素值。
在實際高光譜目標檢測中,可以在原有算法的基礎(chǔ)上增加一步對于閾值的選取,以使結(jié)果更加精確。
4 結(jié)論
閾值的選取一直是高光譜目標檢測中被忽視的一個問題,本文將高光譜圖像進行了二值化,并通過幾種常用的不同原理的閾值選取方法,定量地求出高光譜目標檢測中的閾值設(shè)定,結(jié)果顯示此種方法能夠有效地提取目標的位置和像元信息,解決了通常目標檢測中閾值不準確,識別精度不高的問題,為進一步做好高光譜目標檢測提供了解決思路,同時也拓展了傳統(tǒng)閾值選取方法的應(yīng)用范圍。進一步可以研究的內(nèi)容主要有以下幾個方面:
1)采用更多的閾值選取方法進行試驗。本文只是利用了3種比較常見的閾值選取方法進行目標檢測,而閾值選取方法有很多種,其識別結(jié)果也會有很多差異,我們需要結(jié)合這些算法的原理與高光譜圖像的特點,使用更適合高光譜圖像的閾值選取方法。
2)研究如何將現(xiàn)有方法與高光譜圖像做好接口。高光譜圖像不同于傳統(tǒng)的灰度值圖像,因此在分割時需要考慮到高光譜圖像的特點,本文采用光譜匹配等相關(guān)算法將高光譜圖像與已知光譜曲線進行對比,得到灰度值圖像,而進一步,可以使用更多的處理手段,以使閾值選取的方法更加合適地應(yīng)用在光譜曲線上。
3)提高評價精度。本文由于已知了目標的位置形狀與大小,可以將識別結(jié)果與之直接進行比較評價,但實際目標檢測中不會有先驗知識,評價的參考也就需要進行改變。
猜你喜歡
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12