基于改進PSO的多UAV協(xié)同任務(wù)分配研究
2019-12-03 02:13:48韓慶田
兵器裝備工程學(xué)報 2019年11期
關(guān)鍵詞:分配
韓慶田
(海軍航空大學(xué),山東 煙臺 264001)
目標任務(wù)分配是指在多任務(wù)和多UAV之間進行合理規(guī)劃,充分考慮任務(wù)約束、UAV性能約束和環(huán)境約束,對UAV進行任務(wù)指派,使它們能夠以最佳的方式完成既定任務(wù),從而提高資源的利用率,UAV形成能力互補,提高任務(wù)完成率。
在對多UAV任務(wù)分配問題的研究中,研究人員已經(jīng)提出了多種基于經(jīng)典問題的任務(wù)分配模型,主要包括多旅行商問題(Multiple Traveling Salesman Problem,MTSP)模型、車輛路由問題(Vehicle Routing Problem,VRP)模型、混合整數(shù)線性規(guī)劃(Mixed-Integer Linear Programming,MILP)、動態(tài)網(wǎng)絡(luò)流優(yōu)化(Dynamic Network Flow Optimization)模型、多處理器資源分配(Multiple Processors resources Allocation)模型等[1]。任務(wù)分配問題的研究一般分為分布式和集中式兩大類[2]。基于分布式控制系統(tǒng)結(jié)構(gòu)的任務(wù)分配方法主要包括基于合同網(wǎng)(Contract Net)市場競拍機制的方法、基于粒子群優(yōu)化算法(PSO)的多UAV任務(wù)分配方法、分布式模型預(yù)測控制方法(DMPC)、基于蟻群算法的多UAV任務(wù)分配方法等。集中式算法適應(yīng)于數(shù)據(jù)鏈組網(wǎng)/退網(wǎng)時間較長且UAV計算能力和智能性較差的場景,其關(guān)注算法本身對建模后的組合優(yōu)化問題的求解能力,由中心節(jié)點匯總?cè)啃畔ⅲ捎脙?yōu)化算法求解協(xié)同攻擊方案后進行分配[3-4]。主要采用混合整數(shù)線性規(guī)劃方法、神經(jīng)網(wǎng)絡(luò)方法[5]、分布估計算法[6]、遺傳算法[7-8]、蟻群算法[4]、粒子群算法[9]等優(yōu)化算法進行求解。PSO也廣泛應(yīng)用于解決UAV不確定環(huán)境任務(wù)分配[10-11]、協(xié)同偵察任務(wù)[12]、協(xié)同攻擊行動序列規(guī)劃[13]等問題。邢煥革等[14]運用買賣合同策略來調(diào)整PSO算法解決了異構(gòu)UAV對多類型任務(wù)規(guī)劃的最優(yōu)分配,王強等[15]利用多分支樹結(jié)構(gòu)特點,采用重構(gòu)策略改善粒子搜索能力,但是計算較為復(fù)雜。
任務(wù)分配問題是一類組合優(yōu)化問題,其解空間隨著任務(wù)數(shù)量、UAV數(shù)目、約束等的增多而大幅度提高。學(xué)者們提出的多種求解模型和改進算法加以求解,但在求解具體環(huán)境下任務(wù)分配問題的解的質(zhì)量、計算效率等問題上各有不同。本文主要利用UAV特性和相應(yīng)的任務(wù)類型,研究啟發(fā)信息的引入,以及任務(wù)之間的沖突消解問題,來改進粒子群算法,提高算法的優(yōu)化效率。
1 多UAV協(xié)同目標任務(wù)分配指標建模
為了更好地使UAV執(zhí)行各任務(wù),以UAVUi執(zhí)行任務(wù)Tj時收益、相應(yīng)代價、負載均衡值等組成評價函數(shù)作為分配時的效能指標。
1.1 任務(wù)分配的收益
UAV執(zhí)行任務(wù)的能力是由任務(wù)本身的價值和UAV執(zhí)行該任務(wù)的能力來決定的。UAV執(zhí)行任務(wù)能力由其攜帶的載荷(如探測裝置、武器系統(tǒng)等)和其本身性能所決定。如假設(shè)UAVUi執(zhí)行攻擊Tj的價值為Value(Tj),殺傷概率為Pi(Tj),則Ui執(zhí)行此Tj的收益為:
Rewardij=Valuei(Tj)·Pi(Tj)
(1)
式(1)中,i=1,2,…,Nu,表示第i個UAV,即UAVUi。
1.2 任務(wù)分配的代價
假設(shè)UAV飛行速度、單位距離內(nèi)的燃油消耗量都為常數(shù),則第k階段飛行時間tf的取值與第k-1階段UAV的位置有關(guān),則總飛行時間為:
(2)
式(2)中,Nv表示UAV的數(shù)量;Nt表示目標的數(shù)量;Nc表示任務(wù)的數(shù)量;xi, j,k表示第k階段第i個UAV是否執(zhí)行目標j的任務(wù);1表示得到了分配,0表示未得到分配。
任務(wù)時間是UAVi完成為其分配的所有任務(wù)所消耗的時間Vti,該時間包含飛行時間tf,執(zhí)行任務(wù)時間te以及延遲時間td,則最大任務(wù)時間為:
(3)
式(3)中,Nt表示目標的數(shù)量;Nc表示任務(wù)的數(shù)量;xi, j,k表示第k階段第i個UAV是否執(zhí)行目標j的任務(wù);1表示得到了分配,0表示未得到分配。
1.3 負載均衡值
考慮負載在各個UAV間的均衡分配對系統(tǒng)效能的影響,若某個UAV分配的任務(wù)較多,則會影響其任務(wù)的執(zhí)行。因此,定義UAVUi的負載均衡因子為:

(4)
式(4)中,ELoadi為UAVUi的最佳負載任務(wù)數(shù)目;Loadi為UAVUi的實際負載任務(wù)數(shù)。
設(shè)UAV編隊U={U1,U2,…,UNu}分別從初始位置P={P1,P2,…,PNu}出發(fā)至目標M={M1,M2,…,MNt},執(zhí)行各任務(wù)T={T1,T2,…,TNt}。
1.4 任務(wù)分配效能
考慮任務(wù)的分配收益、消耗值及負載均衡值后,UAVUi的任務(wù)分配效能為:

(5)
式(5)中,ω1>0,ω2>0為權(quán)系數(shù),反映了各指標的重要程度;xij用來表明是否將第i個UAV分配給第j個任務(wù),為布爾量,xij=1表示得到了分配。
若只是考慮時間消耗值和負載均衡值,UAVUi執(zhí)行Tj時的任務(wù)分配效能定義為:
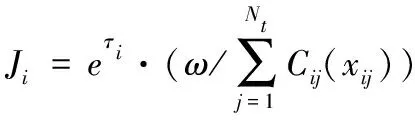
(6)
式(6)中,ω>0為常系數(shù)。
UAVUi自主任務(wù)分配問題的性能指標為:
Fi=maxJi
(7)
約束條件如下:
(8)
(9)
(10)
其中,式(8)表示第i個UAV的最大執(zhí)行能力約束,不超過任務(wù)數(shù)Taski。式(9)表示第k個階段,只能為將一項任務(wù)分配給一個UAV。式(10)表示確保所有任務(wù)都被執(zhí)行完。
3 改進離散粒子群算法
本文采用改進PSO,即基于整數(shù)矩陣編碼方式和粒子移位運算更新對問題進行求解。
3.1 粒子編碼說明
建立粒子編碼與多UAV系統(tǒng)多任務(wù)分配問題之間的映射,是將粒子群算法用于求解分配問題的重要步驟。比較實用的粒子編碼規(guī)則有:一是應(yīng)使用能夠易于產(chǎn)生與所求解問題相關(guān),且具有遞階、短定義長度模式粒子編碼方案;二是應(yīng)使用能夠使得題得到自然表示或描述的具有編碼字符集的編碼方案。這些設(shè)計編碼方案的指導(dǎo)原則,有助于建立相應(yīng)的編碼方案。
根據(jù)多UAV協(xié)同任務(wù)分配的特點,UAV在執(zhí)行任務(wù)過程中,通常要對同一目標執(zhí)行一系列的任務(wù),包括對目標的分類、實施攻擊,以及毀傷評估等,必須使得每一項任務(wù)都有UAV來執(zhí)行,而且同一目標的任務(wù)分配應(yīng)當滿足先后順序,對于特殊的目標還需要滿足優(yōu)先級約束。這樣,要求每一個粒子編碼,需要表示出可能的分配方案,既要有各個目標的各項任務(wù)及其順序約束,又要表示出執(zhí)行該項任務(wù)的UAV。將粒子表示為雙層矩陣,即2行Nc列的矩陣,第一層表示執(zhí)行任務(wù)的UAV編號;第二層表示與第一行UAV編號所對應(yīng)的階段目標序列,每個目標在第二行出現(xiàn)3次,同一目標在矩陣第二行從左到右一次出現(xiàn)的次序,表示對目標執(zhí)行任務(wù)的不同,第一次出現(xiàn)表示UAV對目標執(zhí)行的是分類的任務(wù),第二次出現(xiàn)表示UAV對目標執(zhí)行的是打擊的任務(wù),第三次出現(xiàn)標識UAV對目標執(zhí)行毀傷評估的任務(wù)。表1為一種編碼方案。

表1 粒子編碼方案
這種編碼方法的優(yōu)點在于:保證了粒子表示的UAV任務(wù)規(guī)劃方案服從任務(wù)優(yōu)先序約束,同時滿足任務(wù)協(xié)同約束,粒子能夠較直觀表示UAV對各目標執(zhí)行的任務(wù)情況。
3.2 粒子更新方式
根據(jù)多UAV協(xié)同任務(wù)規(guī)劃問題和本文粒子編碼的實際特點,粒子的第二維數(shù)據(jù)應(yīng)當需要始終滿足任務(wù)總數(shù)約束,也就是說,不同目標標號的總數(shù)應(yīng)該保持不變,以保證任務(wù)的完整性。在基本粒子群算法中,速度位置更新與協(xié)同任務(wù)分配的離散域問題是存在一定差異的。因此,根據(jù)實際的問題,建立相關(guān)的粒子群算法到離散問題的映射,通過粒子追隨個體極值和全局極值的過程進行信息更新,在離散問題空間中重構(gòu)粒子群算法的位置速度更新公式,設(shè)計新的粒子更新方式,這里借助移位向量完成粒子更新,具體術(shù)語與操作符定義如下[15]。
SV(shift vector):移位向量,該向量的元素表示移位對象在粒子中的位數(shù),移位對象按移位向量從左至右依次移位,并將末位移至首位。
SVS(shift vector set):移位向量集,各個移位向量組成的集合。
Fs(x,y):操作集獲取函數(shù),該函數(shù)表示粒子x轉(zhuǎn)換至粒子y所需SVS。
?:選擇操作符,從SVS中選擇一定數(shù)量的SV,構(gòu)成新的SVS′,可知SVS′?SVS。
⊕:移位操作符,按移位向量集進行移位操作。

粒子通過這種移位方式更新時,始終可以滿足約束,確保了分配方案的可行性。
3.3 沖突消解處理策略
根據(jù)初始條件,可以生成各UAV執(zhí)行任務(wù)的情況,任務(wù)分配方案如圖1所示。

圖1 任務(wù)分配方案
任務(wù)分配的初始方案存在著時間沖突,如目標4的三個任務(wù)M10、M11、M12,三個任務(wù)是存在這先后順序的,即首先進行分類,然后進行攻擊,最后進行毀傷評估,后者必須在前者完成之后才可進行,因此需要進行任務(wù)執(zhí)行的沖突消解處理。針對沖突情況,本文提出以下幾種處理策略。
3.3.1分組任務(wù)調(diào)整策略
分組任務(wù)消解,采用先調(diào)整后續(xù)任務(wù)的方法,減少調(diào)整任務(wù)開始時間,即在分類、攻擊、評估任務(wù)中,滿足先后順序的作為一組進行調(diào)整,如圖2所示,比如M8和M9屬于目標3的任務(wù),M11和M12屬于目標4的任務(wù),在執(zhí)行時間允許的情況下,作為一組進行調(diào)節(jié),或者保留兩者的先后順序,這樣就可以避免增加調(diào)整的次數(shù),提高調(diào)整策略。
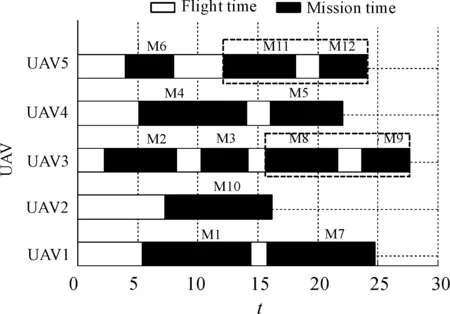
圖2 任務(wù)分組后分配方案
3.3.2任務(wù)交叉消解策略
采用交叉協(xié)商的方法進行任務(wù)的互換。如圖3所示,M6和M7分別屬于不同的目標任務(wù),由不同的UAV執(zhí)行,但是存在著時間沖突,M6需要在M4、M5之后執(zhí)行,M7需要在M8之前執(zhí)行,如果采用交叉消解的方法,互換M6和M7的位置,換位后M7在M8之前執(zhí)行完畢,M6的時間向后調(diào)整,為再次調(diào)整M5和M6的時間提高了效率,同時M7的時間長于M6,互換后原來M6的后續(xù)任務(wù)M11和M12向后調(diào)整,同時滿足了在M10之后的執(zhí)行的條件,因此大幅度提高了調(diào)整效率。
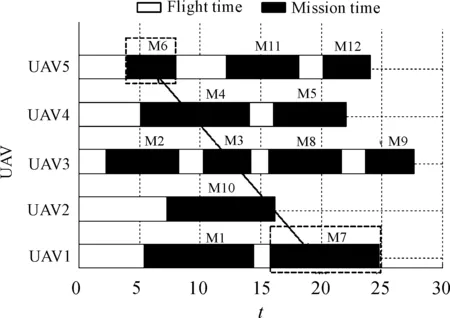
圖3 分組任務(wù)調(diào)整
3.3.3飛行時間調(diào)整策略
為了滿足任務(wù)執(zhí)行順序,需要對任務(wù)次序進行調(diào)整的同時,通過調(diào)整飛行時間達到時間調(diào)整的目的。如圖4所示,M11的開始執(zhí)行時間,應(yīng)向后調(diào)整它與M10結(jié)束時間的差值,從而滿足任務(wù)先后順序要求。
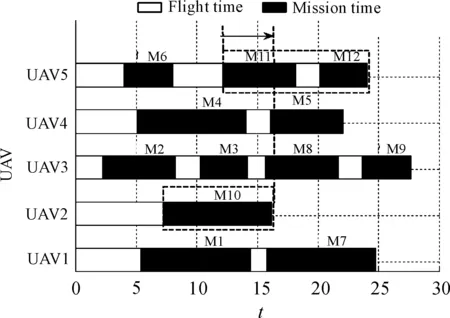
圖4 飛行時間調(diào)整
3.3.4時序先后調(diào)整策略
為了減少調(diào)整量,采用從前往后的順序進行調(diào)整,這樣后面時間調(diào)整對前面時間調(diào)整不會產(chǎn)生影響。如圖5所示,UAV3的任務(wù)調(diào)整過程中,首先調(diào)整M2和M3,然后再調(diào)整M8和M9。如果順序相反,先調(diào)整M8和M9,再調(diào)整M2和M3則M8和M9的執(zhí)行時間會受到影響,降低了沖突消解的效率。

圖5 時序先后調(diào)整
4 仿真實驗
仿真環(huán)境設(shè)置為UAV的初始坐標為V1(1,1),V2(1,5),V3(5,1),V4(2,3),V5(7,8),目標坐標為T1(6,3),T2(3,8),T3(7,7),T4(7,9)。
粒子群算法參數(shù)設(shè)置為種群大小為50,最大迭代次數(shù)為100。
對目標任務(wù)分配和航跡規(guī)劃進行仿真,優(yōu)化后任務(wù)分配方案如圖6所示,目標任務(wù)分配方案見表2,算法仿真計算結(jié)果比較見表3,加入啟發(fā)信息和改進沖突消解策略前后的算法收斂情況如圖7所示
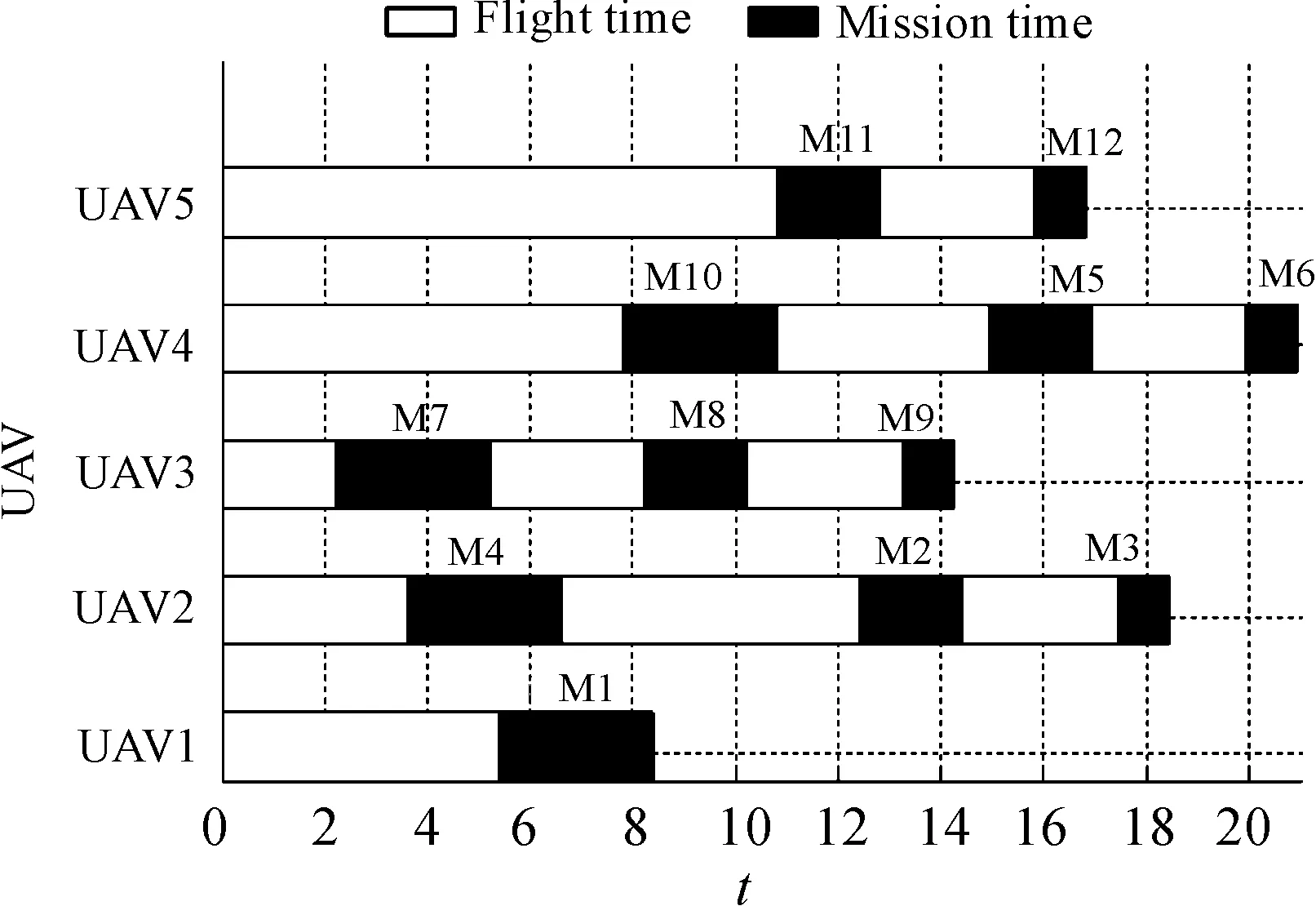
圖6 優(yōu)化后的任務(wù)分配方案
表2 任務(wù)分配方案
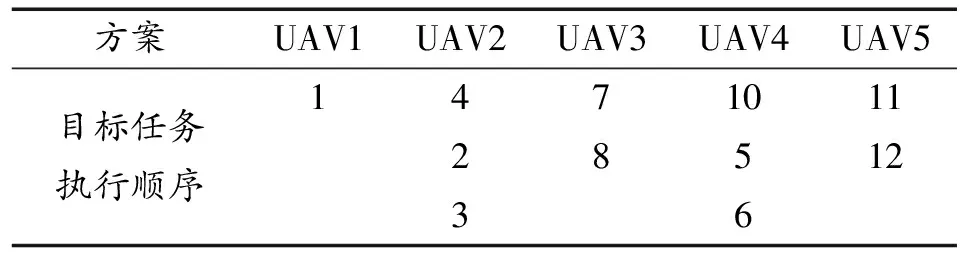
方案UAV1UAV2UAV3UAV4UAV5目標任務(wù)執(zhí)行順序14710112851236
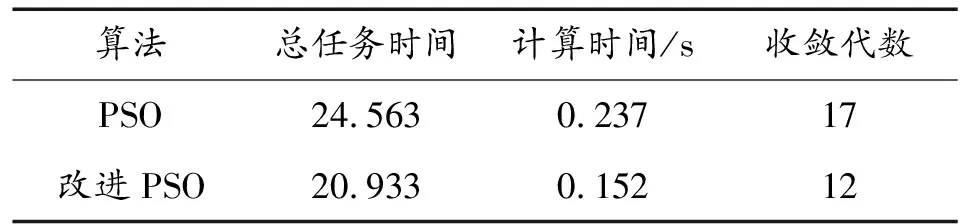
表3 算法仿真結(jié)果比較
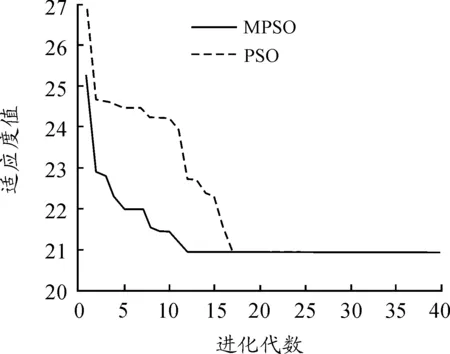
圖7 適應(yīng)度值收斂曲線
仿真結(jié)果表明,方案考慮了UAV任務(wù)均衡型、航跡長度,同時考慮了飛行約束,規(guī)劃方案可行有效。通過進行沖突消解策略改進PSO算法,計算得到的總?cè)蝿?wù)時間優(yōu)于PSO算法,且仿真計算用時短、效率高,表明改進PSO算法的收斂性和全局搜索能力較好。
UAV任務(wù)執(zhí)行情況如圖8所示。

圖8 任務(wù)分配方案示意圖
5 結(jié)論
針對多UAV目標任務(wù)分配問題進行研究。本文考慮UAV總飛行時間代價、最大任務(wù)時間、負載均衡值以及任務(wù)時序約束因素的情況下,建立了多UAV協(xié)同任務(wù)分配模型。將任務(wù)類型匹配信息作為啟發(fā)信息,同時提出分組任務(wù)調(diào)整、飛行時間調(diào)整、任務(wù)交叉消解、時序先后調(diào)整等沖突消解處理策略,改進粒子群算法。仿真實驗結(jié)果表明,基于啟發(fā)信息和沖突消解策略的改進PSO算法,提高了算法的收斂性和全局搜索能力,提升了任務(wù)分配和航跡規(guī)劃效率。
猜你喜歡
天水行政學(xué)院學(xué)報(2022年4期)2022-11-18 09:02:36
艦船科學(xué)技術(shù)(2022年13期)2022-08-11 09:30:02
鐵道通信信號(2020年9期)2020-02-06 09:15:22
漢語世界(The World of Chinese)(2019年3期)2019-07-01 02:37:48
數(shù)學(xué)大王·趣味邏輯(2019年5期)2019-06-13 20:27:43
小學(xué)科學(xué)(學(xué)生版)(2019年5期)2019-05-21 01:00:18
中學(xué)生數(shù)理化·中考版(2018年10期)2018-12-07 00:44:52
經(jīng)濟技術(shù)協(xié)作信息(2018年30期)2018-11-22 06:20:24
中央社會主義學(xué)院學(xué)報(2017年1期)2017-04-16 05:34:07
中國衛(wèi)生(2014年12期)2014-11-12 13:12:40