基于自適應最大相關峭度解卷積的滾動軸承多故障診斷
2019-12-02 06:05:12胡愛軍
振動與沖擊 2019年22期
胡愛軍, 趙 軍
(華北電力大學 機械工程系,河北 保定 071003)
滾動軸承是旋轉機械中重要的零部件之一。不同種類的軸承故障可能會對機械系統產生嚴重的危害。長期運行的軸承往往會伴有多個故障同時存在的狀況。與單一故障信號相比,多故障信號相互干擾,變得更為復雜。因此,對于軸承多故障特征的準確分離與提取受到越來越多人的關注[1]。
近年來,人們相繼提出了盲源分離[2]、自適應譜峭度[3]、小波-頻譜自相關[4]等方法來分離和識別滾動軸承的多故障特征。但上述方法主要針對內、外圈(具有不同故障特征頻率)的復合故障特征分離。工程實際中,從NTN、Emerson等多家軸承制造商展示的軸承故障類型圖片中[5]可以發現,軸承的某一部件出現多個故障點的情況是很常見的,然而,對于此類滾動軸承多故障診斷的研究還較少。當滾動軸承某個部件出現多點故障時,由于多故障之間的相互作用,傳統包絡譜分析可能得不到有效的診斷結果,容易導致漏診問題。因此,能夠實現滾動軸承單部件多點故障的準確診斷同樣具有重要的工程意義。
文獻[6]指出振動信號可以被認為是由故障引起的周期性沖擊信號與機械部件的共振響應卷積的結果,并且解卷積是恢復脈沖的有效方法。最大相關峭度解卷積(Maximum Correlation Kurtosis Deconvolution ,MCKD)已被證明是一種有效的解卷積方法,可以通過設定相應故障的移位周期,把影響其得到相關峭度最大值的信號視為干擾成分,提取出具有興趣周期的解卷積信號,已用于齒輪和軸承的故障診斷[7-8]。然而,MCKD的輸入參數濾波器長度L和移位數M需要人工選擇,并且這些參數的準確性和適用性得到了保證,MCKD的優越性才能夠被突出顯示。
最大相關峭度解卷積信號的包絡譜中通常會出現所設定移位周期的故障特征頻率及其倍頻成分,呈現出典型的周期性脈沖的特點[9]。本文以最大相關峭度解卷積信號的包絡譜的譜相關峭度值作為適應度函數,采用人工魚群算法,自適應得到MCKD的最優參數,并利用參數優化的最大相關峭度解卷積實現滾動軸承多故障分析,提出了一種自適應最大相關峭度解卷積的滾動軸承多故障診斷方法,仿真和實驗信號分析表明該方法可以有效實現滾動軸承多故障的準確診斷。
1 基本原理介紹
1.1 MCKD算法
MCKD通過尋找一個最佳FIR濾波器f使故障信號濾波后的相關峭度值最大,以突出信號中所設定故障移位周期的連續性沖擊成分。
逆濾波器的一般表達式為
(1)
式中:xn為輸入信號;yn為輸出信號;f,L分別為濾波器系數,濾波長度。
相關峭度的定義為
(2)
式中:M為移位數;Ts為設定迭代周期的采樣點,其計算式為
Ts=fs·T
(3)
式中:fs為采樣頻率;T為故障周期。
MCKD的最終目標函數表示為
(4)
由式(1)和式(4)可以得到濾波器系數的最終迭代表達式為
(5)
其中,
將得到的最終迭代濾波器系數代入式(1),可以得到實際采集信號x的解卷積信號y。
1.2 人工魚群算法
人工魚群算法[10]作為一種群體智能優化算法,模仿了魚群的覓食、聚群和追尾行為。以構建每一條人工魚的簡單行為為起點,先讓魚群中的個體局部尋找最優,然后在群體中達到全局最優,具有靈活性強、對初值不敏感等優點[11]。本文利用人工魚群算法對MCKD算法的兩個影響參數同時進行優化,可實現移位數M和濾波長度L的自適應選取。
假設魚群當前的狀態為X=[x1,x2,…,xn],其中n為魚群數量,Xi=[Mi;Li](i=1,2,…,n)表示第i條人工魚所處的位置,表示AMCKD方法中第i個待優化的參數向量組合。Xi處的食物濃度值(即:計算出待優化參數組合[Mi;Li]對應的CK(包絡譜譜相關相關峭度)值的大小)為
Yi=CK(Xi)
(6)
(1)覓食行為:設當前人工魚的狀態為Xi,在其視野范圍內隨機選擇一個狀態Xj,為
Xj=Xi+r·Visual
(7)
式中:r為-1~1的隨機數;Visual為視野范圍,如果食物濃度Yj>Yi,則向該方向移動一步,為
(8)
式中:Step為移動步長。反之,人工魚將任意選取一個位置,并判別是否達到移動的條件要求。如果在try_number次覓食行為后仍不能找到一個滿足條件的位置,它將執行隨機移動行為
Xi+1=Xi+r·Step
(9)
(2)聚群行為:設當前人工魚狀態為Xi,其視覺范圍內的伙伴數目為nf,中心位置為Xc,如果Yc/nf>δYi,則表明伙伴中心處食物充足并且不太擁擠,則人工魚向中心位置Xc前進一步,為
(10)
否則執行覓食行為。
(3)追尾行為:設人工魚當前狀態為Xi,其視覺范圍內的最優鄰居為Xm,并且Xm的視覺范圍內的伙伴數目nf滿足Ym/nf>δYi,表明Xm的附近食物充足并且不太擁擠,則向Xm的位置前進一步,為
(11)
否則執行覓食行為。
(4)行為評估:根據我們將解決的問題評估當前環境中的人工魚,然后執行適當的行為。
(5)公告更新:通過公告牌記錄人工魚的最佳狀態和問題的最佳值。在執行動作后,每條人工魚都會更新并與公告牌相對比,實現公告牌上的值不斷更新。
2 診斷流程
本文利用人工魚群算法,以最大相關峭度解卷積信號的包絡譜的譜相關峭度值為適應度函數,并行搜尋MCKD的影響參數,提出了一種自適應最大相關峭度解卷積的滾動軸承多故障診斷方法,具體診斷流程如下所示:
由此可見,漢代皇帝的敕令要想上升為法律,有嚴格的立法程序。首先,須要“具為令”,讓某項皇帝的敕令獲準立法,進入立法計劃。然后,將進入立法計劃的令交由朝臣商議后完成內容的制定。即“著為令”或“議著為令”。最后經由皇帝批準,頒行天下。
步驟1根據滾動軸承的結構參數計算軸承外圈、內圈、保持架及滾動體的理論故障特征頻率,設置 MCKD的解卷積周期。
步驟2初始化人工魚群算法的變量及搜索空間范圍,根據文獻[12-13]并結合實際經驗,本文設置的控制變量如下:種群規模N=20,最大迭代次數Maxgen=30,最多嘗試次try_number=10;感知距離visual=1;擁擠因子α=0.618;步長step=0.5。此外,濾波器長度參數L的搜索空間范圍為[2,500],移位數M的搜索空間范圍為[1,7] 。
步驟3利用人工魚群算法以包絡譜的譜相關峭度最大值作為最優解卷積處理結果的評價指標,對MCKD的影響參數組合[L,M]進行并行搜索,并記錄最佳參數。
步驟4根據所得的最佳參數組合設置MCKD的參數,并對故障信號做解卷積處理。
步驟5對分離所得的故障信號做Hilbert包絡譜分析,將包絡譜中突出頻率成分與理論故障特征頻率進行對比,從而判斷故障類型。
3 仿真信號分析
一般情況下,在進行軸承故障仿真時多使用單故障激起單共振頻帶的仿真模型[14],也有文獻提出單個故障可以激起多個共振頻帶的情況[15],多故障條件下,本文采用多故障激起多個共振頻帶的滾動軸承多故障仿真模型。(第1個故障激起fn1,第2個故障激起fn2,第3個故障同時激起fn1和fn2)。具體仿真信號為

(12)
式中:S1,S2為第1點和第2點故障分別在fn1,fn2處激起的幅值,取0.4和0.3;S3,S4為第3點故障分別在fn1,fn2處激起的幅值,取0.15和0.2;轉頻fr為25 Hz;共振頻帶fn1為2 500 Hz,fn2為4 000 Hz;衰減系數C為800;故障特征頻率fo=1/T1=100 Hz;n(t)為加入的的高斯白噪聲,信噪比為-8 dB;采樣頻率為12 800 Hz,分析點數為4 096點。
將本文所提出的方法應用于仿真信號分析,結果如圖2所示。圖2(a)為優化值隨迭代次數變化的關系曲線。搜尋到的最佳影響參數組合[L,M]為[465,1],設定MCKD算法的濾波器長度為465,移位數為1,對仿真信號進行處理,結果如圖2(b)所示。對比圖1(a),值得注意的是,AMCKD算法為緩解多故障的相互作用,解卷積信號的每個故障周期內僅突出了1次脈沖。圖2(c)為解卷積信號對應的頻譜,與圖1(c)相比,AMCKD算法成功找到了故障信號的兩個共振頻帶,并且消除了高斯白噪聲成分;圖2(d)的包絡譜譜圖比較干凈,主要成分為外圈故障特征頻率及其多階倍頻fo~4fo,其他干擾譜線較少,實現滾動軸承故障類型的準確判斷。
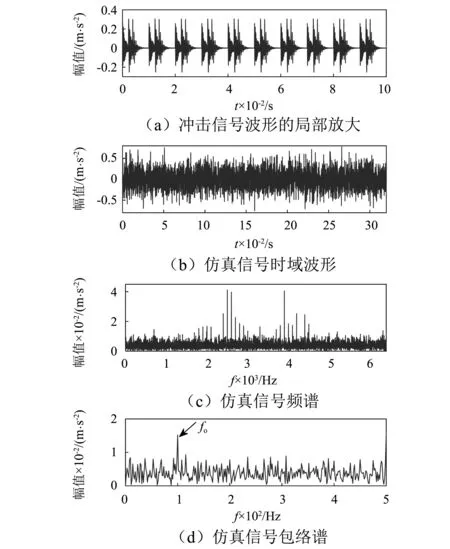
圖1 仿真信號的波形、頻譜和包絡譜Fig.1 Waveform, spectrum and envelope spectrum of simulation signal
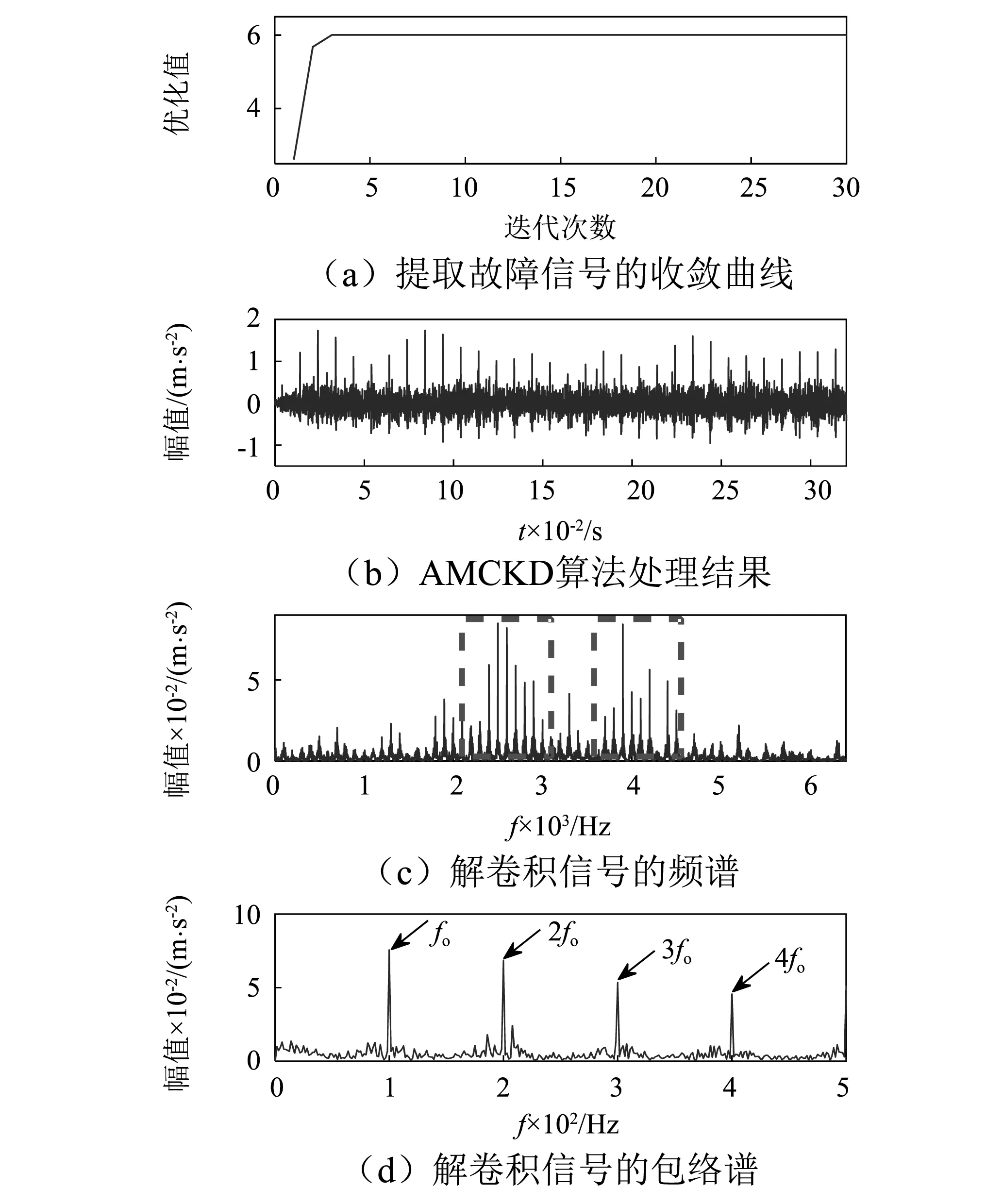
圖2 本文所提方法的仿真信號分析結果Fig.2 Analysis results of simulated signal by proposed method
4 實測信號分析
使用QPZZ-Ⅱ型旋轉機械故障實驗臺進行滾動軸承多故障實驗。采用LYC6205E型深溝球軸承,利用線切割在滾動軸承內圈滾道上加工出深度為1.5 mm,寬度為0.2 mm的凹槽,故障軸承如圖3所示。實驗中,電機轉速為1 466 r/min,采樣頻率為25 600 Hz。根據滾動軸承的結構參數計算得到的內圈故障特征頻率fi為132.3 Hz。

圖3 多故障實驗軸承Fig.3 Multiple faults experiment bearing
為了說明本文研究滾動軸承多故障的重要性,以及較好驗證本文所提方法在滾動軸承多故障診斷方面的可靠性。試驗中分別采用內圈具有1、2、3個故障的軸承,分別進行3次模擬試驗。
4.1 內圈具有單故障的信號分析
實測單故障信號的波形、包絡譜如圖4所示。從圖4(a)故障信號的時域波形中可以看到明顯的周期性沖擊成分;在圖4(b)的包絡譜中,能夠清晰發現內圈故障特征頻率及其多階倍頻成分、轉頻及特征頻率的轉頻調制邊帶,很容易確診為內圈故障。
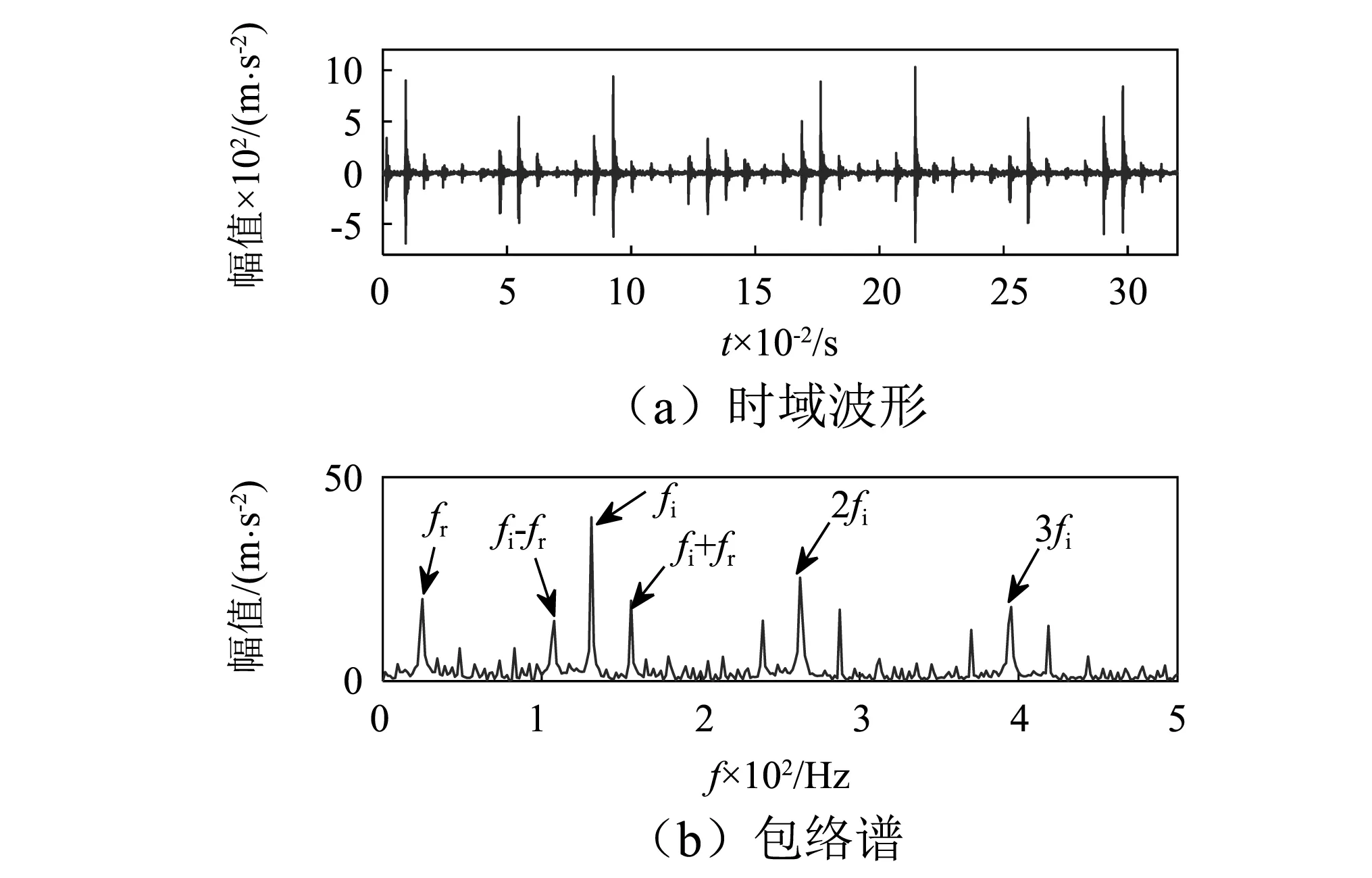
圖4 實測信號1的波形及包絡譜Fig. 4 Waveform and envelope spectrum of measured signal 1
4.2 內圈具有兩個故障的信號分析
實測兩個故障信號的波形、頻譜及包絡譜如圖5所示。圖5(a)為故障信號的時域波形,對比圖4(a),雖然在相同的故障大小和同樣的背景下環境下進行的實驗,但是由于滾動軸承多故障而產生了較大干擾噪聲;從圖5(b)頻譜可以看出,滾動軸承故障激起了多個共振頻帶,遍布于整個頻帶范圍,并且在低頻段內未發現故障的特征頻率;從圖5(c)包絡譜中僅發現內圈故障特征頻率的基頻成分,其倍頻成分不明顯,且出現較多的干擾頻率,需要對信號做進一步的診斷工作。

圖5 實測信號2的波形、頻譜和包絡譜Fig.5 Waveform, spectrum and envelope spectrum of measured signal 2
利用本文所提方法對故障信號進行分析,結果如圖6所示。圖6(a)為優化值隨迭代次數變化的關系曲線。在提取內圈故障信號時的最優影響參數組合為L=365,M=1。經參數優化的MCKD算法處理結果如圖6(b)所示,觀察可以發現,解卷積信號的周期性故障脈沖成分明顯增強。圖6(c)為解卷積提取出的故障信號的頻譜,圖中呈現出兩個能量較為集中的頻帶。進一步的包絡譜分析結果如圖6(d)所示,譜圖清晰,除內圈故障特征頻率的基頻外,其多階倍頻成分也十分明顯,由此可以斷定為滾動軸承內圈存在損傷。
為了驗證本文方法在滾動軸承多故障診斷方面的優越性,利用譜峭度對實測故障信號2做對比分析,分析結果如圖7所示。圖中呈現出兩個能量較高的共振頻帶,其中頻帶1對應圖6(c)中的共振頻帶A,頻帶2對應圖6(c)中的共振頻帶B。分別使用這兩頻帶對故障信號做帶通濾波,濾波信號的包絡譜如圖7(b)和圖7(c)所示,雖然能夠找到故障特征頻率的2倍頻,但仍有較大的其他干擾頻率。因此, AMCKD方法不但能夠正確提取到由故障激起的共振頻帶,而且在不用考慮共振頻帶的帶寬和中心頻率等問題的情況下,解除多故障的相互干擾,實現故障的準確診斷,具有一定優勢。
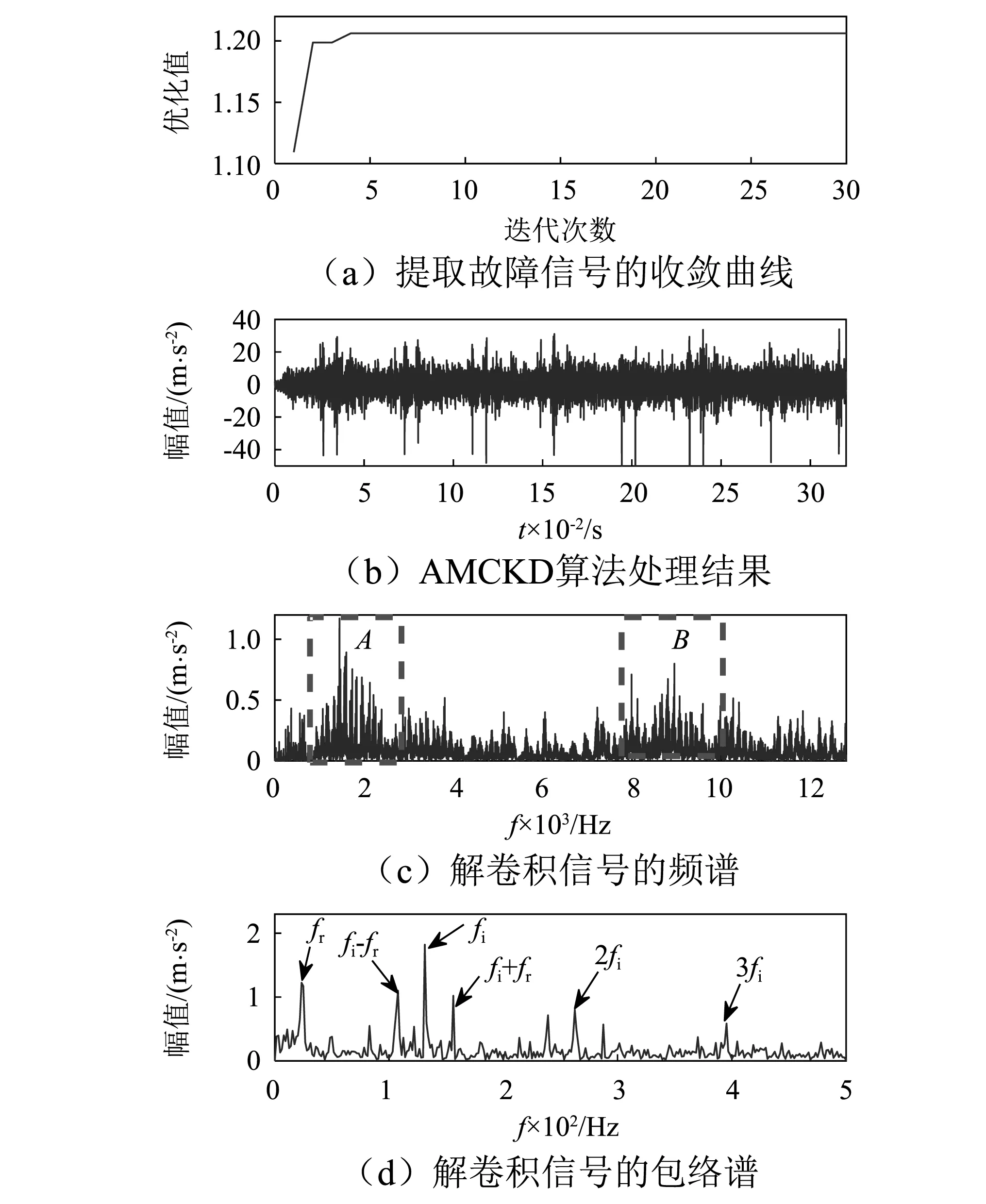
圖6 本文所提方法對實測信號2的分析結果Fig.6 Analysis results of measured signal 2 by proposed method
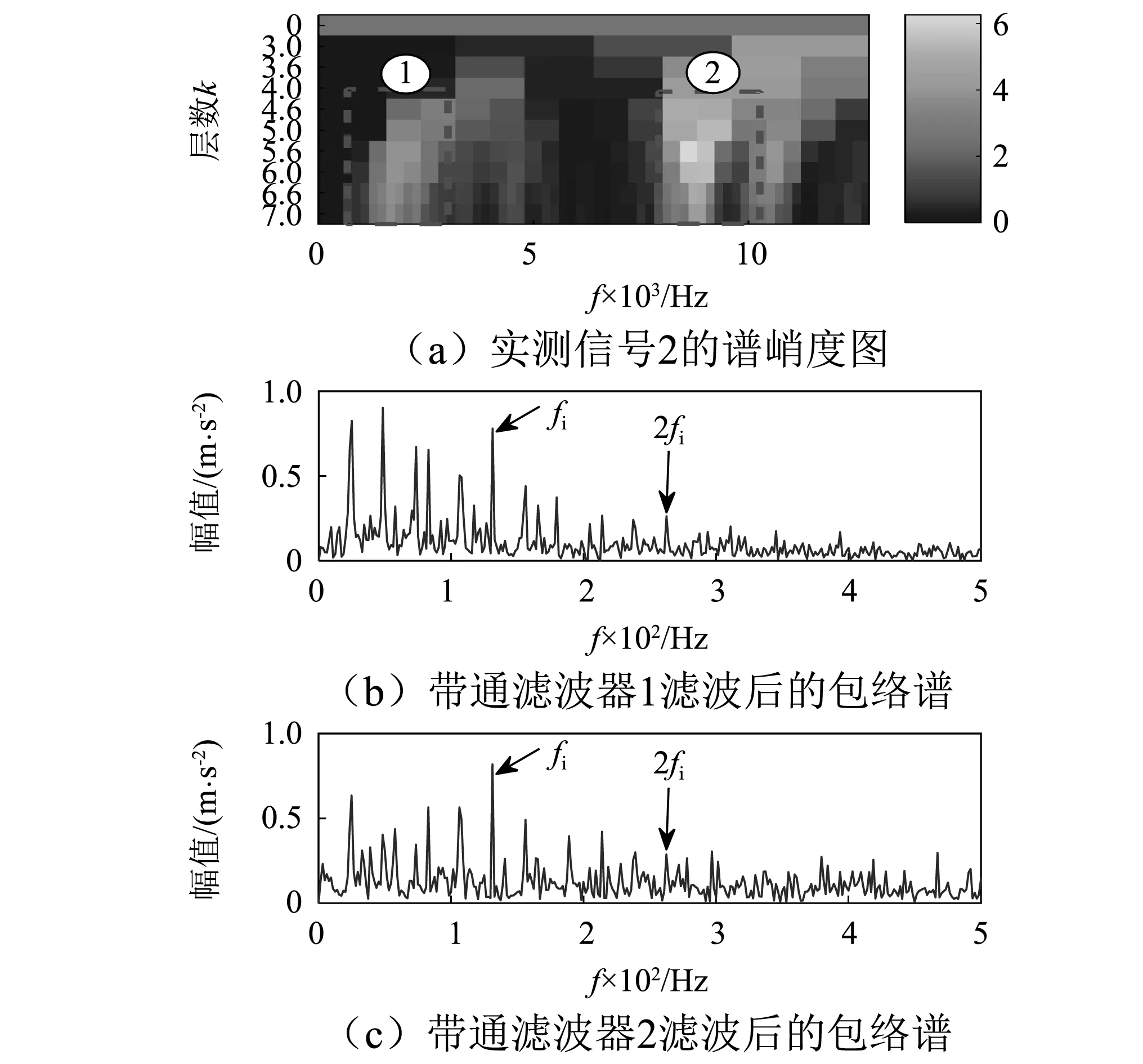
圖7 實測信號2的譜峭度分析結果Fig. 7 Analysis results of measured signal 2 by kurtogram
4.3 內圈具有三個故障的信號分析
實測三個故障信號的波形、頻譜及包絡譜如圖8所示。圖8(a)為故障信號的時域波形,未見明顯的周期性脈沖,且與單故障信號相比產生了較大的干擾噪聲;從圖8(c)包絡譜中發現幅值較大的轉頻特征、十分微弱的內圈故障特征頻率,難以對軸承的故障狀態做出判斷。
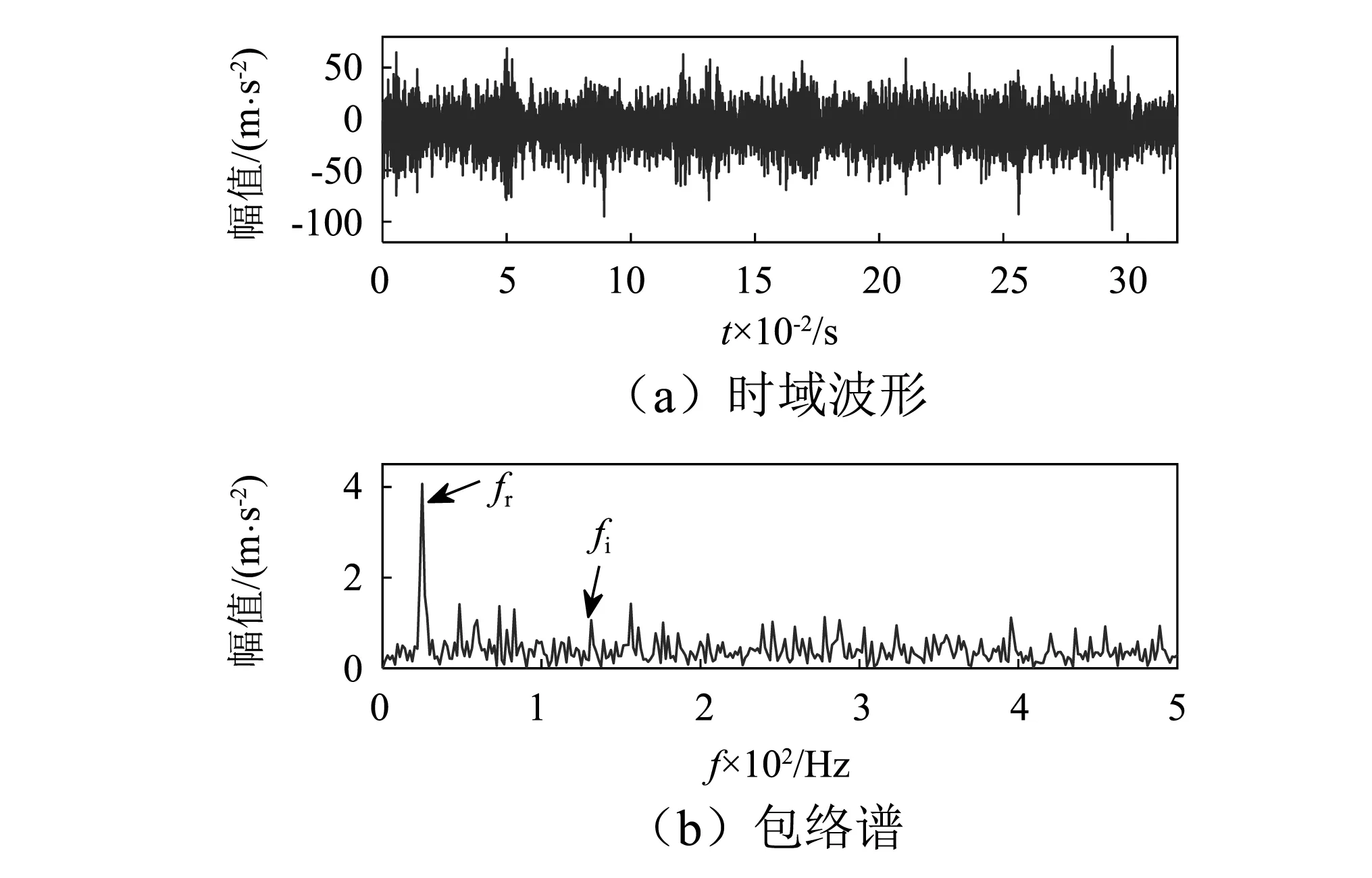
圖8 實測信號2的波形和包絡譜Fig.8 Waveform and envelope spectrum of measured signal 2
圖9為利用本文所提方法對故障信號進行分析所得結果。圖9(a)中,人工魚群迭代到16次時得到目標函數最大值,此時的濾波器長度和移位數的最佳參數組合為[67,6],經參數優化的MCKD算法處理結果如圖9(b)所示,圖9(c)解卷積包絡譜中,內圈故障特征頻率及其倍頻fi~3fi被提取出來,表明軸承內圈發生故障,理論分析與實際情況相符。
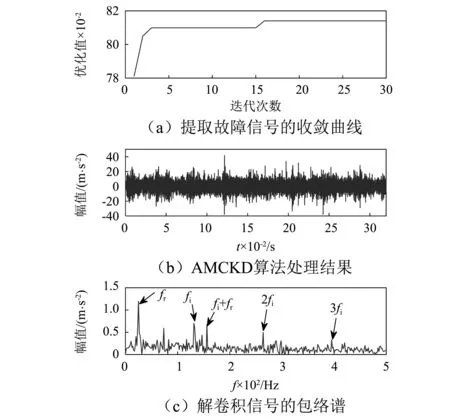
圖9 本文所提方法對實測信號3的分析結果Fig. 9 Analysis results of measured signal 3 by proposed method
為了進一步驗證本文方法的可靠性,隨機更改最佳參數組合中的一個參數,并利用更改后參數的MCKD算法對故障信號進行分析。圖10(a) 和圖10(b)分別為將最佳影響參數組合[67,6]改為[80,6],[67,5]時的分析結果。對比圖9(c),隨機更改參數組合后處理信號的包絡譜中僅僅出現了比較微弱的內圈故障特征頻率,仍不能準確確定故障位置。分析結果表明,影響參數的組合對MCKD算法的處理結果有著嚴重限制,隨機選擇的參數對處理結果具有一定偶然性。因此,本文利用人工魚群算法對影響參數進行了自適應選取,成功避免了需要人工設定的缺點,實現最佳的分析效果。

圖10 更改參數后的實測信號3的分析結果Fig.10 Analysis results of measured signal 3 after changing the parameters
5 結 論
本文針對MCKD的濾波器長度參數和移位數需要人工設定的問題,提出了一種自適應最大相關峭度解卷積的滾動軸承多故障診斷方法。該方法以包絡譜的譜相關峭度最大值作為最優解卷積處理結果的評價指標,采用人工魚群算法對MCKD的影響參數組合[L,M]進行了的自適應選擇和優化。
通過采用滾動軸承內圈1個、2個、3個故障的對比試驗分析表明,當軸承處于多故障狀態時,雖然故障程度大于軸承的單點故障,但由于滾動軸承多故障的相互作用,傳統的包絡譜分析方法可能診斷失效。利用本文方法能夠在不用設計帶通濾波器選擇共振頻帶的情況下,不僅能夠準確提取由故障激起的共振頻帶,而且能夠降低多故障帶來的相互作用,實現滾動軸承故障的準確判斷,具有一定的工程應用價值。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車維修與保養(2019年7期)2020-01-06 03:30:42
中國生殖健康(2019年3期)2019-02-01 06:12:26
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年2期)2015-04-17 01:30:34
