404 Not Found
404 Not Found
自動(dòng)緊急制動(dòng)系統(tǒng)失效場景分類研究
文/宋雪松 曹建永 董小飛
一、自動(dòng)緊急剎車系統(tǒng)(AEBS)測試方法運(yùn)用現(xiàn)狀
AEBS是專門用于機(jī)動(dòng)車避免或減緩碰撞的系統(tǒng)。目前,國內(nèi)外對(duì)該系統(tǒng)性能的測試方法(如:ECE R131《移動(dòng)目標(biāo)車設(shè)計(jì)與驗(yàn)證》法規(guī)、歐盟新車安全評(píng)鑒協(xié)會(huì)(ENCAP)對(duì)AEBS的測試場景)均為無其他目標(biāo)物干擾的理想道路情況。在美國交通運(yùn)輸部(NHTSA)發(fā)布的《自動(dòng)緊急剎車研究報(bào)告》顯示,除了標(biāo)準(zhǔn)車輛碰撞迫近制動(dòng)系統(tǒng)(CIB)和動(dòng)態(tài)制動(dòng)支持系統(tǒng)(DBS)測試外,還對(duì)鐵板誤作用進(jìn)行試驗(yàn),不同環(huán)境(如:下雨、夜晚或早上太陽直射)下進(jìn)行試驗(yàn)測試。一般代加工(OEM)廠商對(duì)AEBS的測試,主要涉及:相關(guān)法規(guī)的性能測試和實(shí)車道路試驗(yàn)(FOT)。其中,F(xiàn)OT一般對(duì)路試地點(diǎn)、公里數(shù)進(jìn)行定義,最后統(tǒng)計(jì)未觸發(fā)率和誤觸發(fā)率。這種FOT路試是一種耗費(fèi)大量資源的被動(dòng)型測試,針對(duì)性差、效率低。故本文嘗試運(yùn)用六層功能分解的方法對(duì)AEBS失效場景進(jìn)行分類研究,希望能夠提高測試效率和應(yīng)用價(jià)值。
二、六層功能分解方法運(yùn)用
由于AEBS功能在不同的場景下會(huì)發(fā)生變化,無法保證在實(shí)際場景下能達(dá)到標(biāo)準(zhǔn)測試的性能水平,因此,總結(jié)AEBS失效場景工作非常重要。然后對(duì)AEBS的功能產(chǎn)生影響的場景非常多,且場景復(fù)雜,因此研究場景如何對(duì)AEBS功能產(chǎn)生影響變得很重要。
Christian Amersbach和Hermann Winner提出的“六層功能分解方法”目前已被廣泛地應(yīng)用于數(shù)學(xué)、信息、機(jī)器人和分析駕駛員行為導(dǎo)致的交通事故等領(lǐng)域,它將復(fù)雜功能分解為從屬功能。
本文采用六層功能分解方法對(duì)AEBS失效場景進(jìn)行分類,從而降低失效場景分析的復(fù)雜性,提高場景分析的系統(tǒng)性,使測試任務(wù)更有針對(duì)性,科學(xué)地減少測試工作量。本文的目的在于將復(fù)雜繁多的測試場景轉(zhuǎn)化為針對(duì)各層功能的測試,使測試變?yōu)橛羞吔绲臏y試。
1. 假陽性和假陰性分類
駕駛員輔助系統(tǒng)失效可以分為兩大類,即假陽性(誤觸發(fā),F(xiàn)P)和假陰性(漏觸發(fā),F(xiàn)N)。FP和FN是評(píng)價(jià)駕駛員輔助系統(tǒng)性能的重要指標(biāo),例如:在盲區(qū)監(jiān)測系統(tǒng)中,一般FOT測試場景為高速公路場景100 km、城郊場景100 km、郊區(qū)場景100 km,F(xiàn)P誤報(bào)率和FN漏報(bào)率均要求小于1%。
2. 功能分解方法分類
應(yīng)用功能分解方法對(duì)失效場景分析時(shí),需要對(duì)失效原因進(jìn)行定位。首先,將駕駛輔助系統(tǒng)的功能實(shí)現(xiàn)分解為相互獨(dú)立的6層(見圖1);然后,對(duì)各層之間的接口傳輸信息模型進(jìn)行分析,并總結(jié)各層典型失效場景。
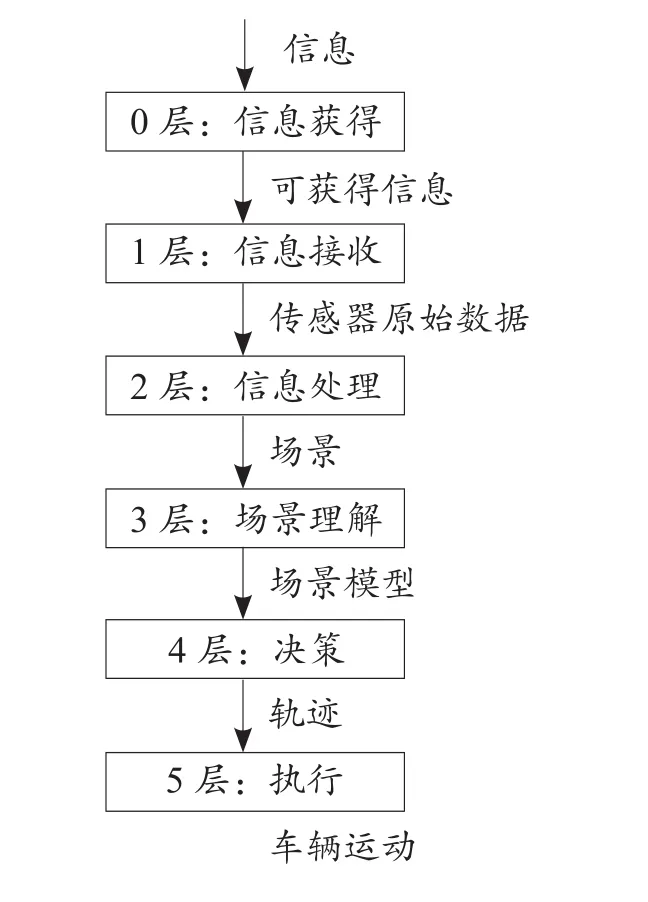
圖1 功能分解層
① 第0層——信息獲得
0層主要受基礎(chǔ)設(shè)施、天氣和目標(biāo)物的影響,其定義適用于各級(jí)別自動(dòng)駕駛與各種駕駛輔助系統(tǒng),描述了哪些信息是可獲得的。如,交通限速標(biāo)志被前方卡車遮擋,從而導(dǎo)致車限速提醒系統(tǒng)失效場景歸類為0層。此情況是屬環(huán)境感知傳感器的安裝位置對(duì)其視場角有影響,從而影響信息獲得。在實(shí)際測試中,一般假定在功能測試之前,環(huán)境感知傳感器已安裝在最佳位置。盡管信息獲得層不是駕駛輔助系統(tǒng)的組成部分,但為了確保駕駛輔助功能的正常工作,必須考慮信息獲得層。理想情況下,可獲得信息全部從0層輸入1層。
② 第1層——信息接收
信息接收層包含所有外部環(huán)境感知傳感器、CAR2X軟件或后端傳輸信息通道。第1層中發(fā)生的典型錯(cuò)誤為視覺傳感器攝像頭上沾染泥巴或雪等場景,導(dǎo)致其無法獲得全部場景信息。1層與2層接口之間為傳感器原始數(shù)據(jù)、車輛到所有(v2x)監(jiān)測系統(tǒng)無線電連接或后端傳輸信息。
③ 第2層——信息處理
傳感器數(shù)據(jù)融合、目標(biāo)分類和環(huán)境模型生成位于第2層。本層的典型錯(cuò)誤為:目標(biāo)分類錯(cuò)誤、FP和FN目標(biāo)識(shí)別。
④ 第3層——場景理解
在這一層中,第2層的場景中的目標(biāo)與特定信息被挑選與擴(kuò)充。本層的典型錯(cuò)誤為預(yù)測目標(biāo)車輛運(yùn)動(dòng)軌跡錯(cuò)誤。
⑤ 第4層——運(yùn)動(dòng)決策
本層為基于場景模型輔助駕駛功能算法所確定的運(yùn)動(dòng)決策。它的典型錯(cuò)誤為運(yùn)動(dòng)決策錯(cuò)誤導(dǎo)致的與他車的碰撞。
⑥ 第5層——執(zhí)行
最后一層將4層的運(yùn)動(dòng)規(guī)劃軌跡變?yōu)閷?shí)際車輛運(yùn)動(dòng),包含了相應(yīng)的運(yùn)動(dòng)執(zhí)行機(jī)構(gòu)與車輛運(yùn)動(dòng)控制算法。它典型錯(cuò)誤為運(yùn)動(dòng)控制算法不穩(wěn)定。
3. 失效場景分類
首先對(duì)AEBS失效場景進(jìn)行整理,共總結(jié)了37種失效場景,然后對(duì)失效場景進(jìn)行假陰性、假陽性分類,最后依據(jù)功能分解方法對(duì)失效場景進(jìn)行分類,并簡述失效原因(見表1~表6)。
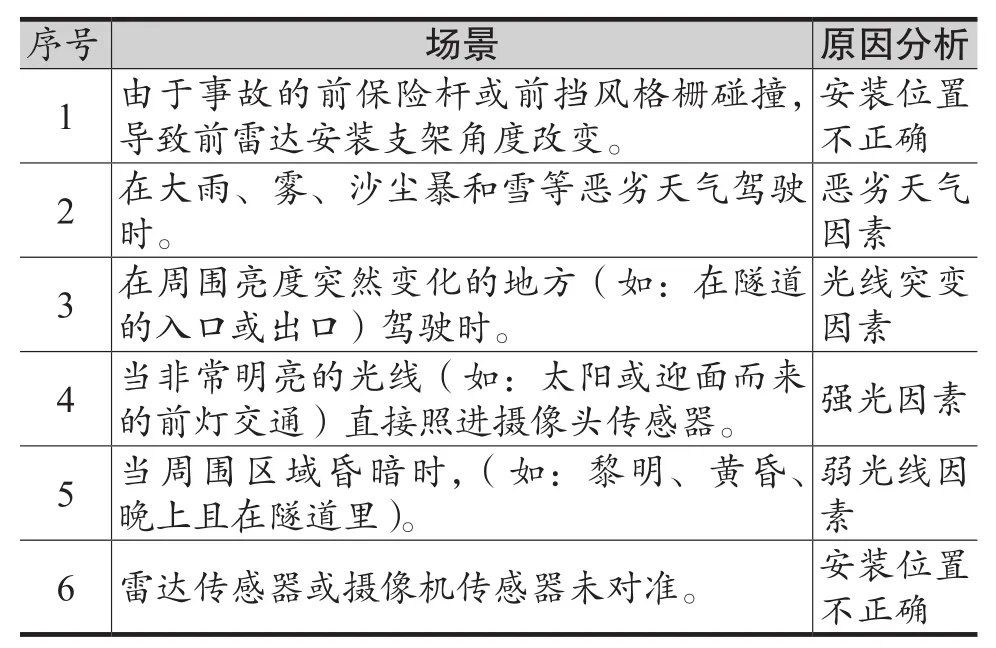
表1 0層失效場景與信息獲得失效(FN)
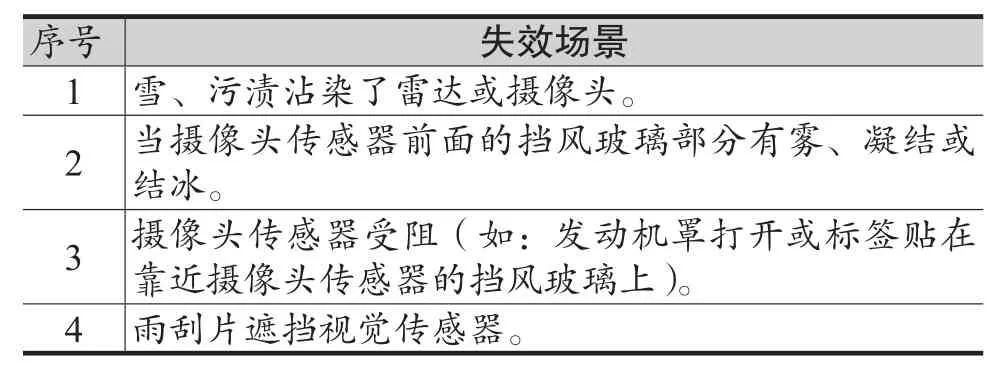
表2 1層傳感器污染失效場景(FN)
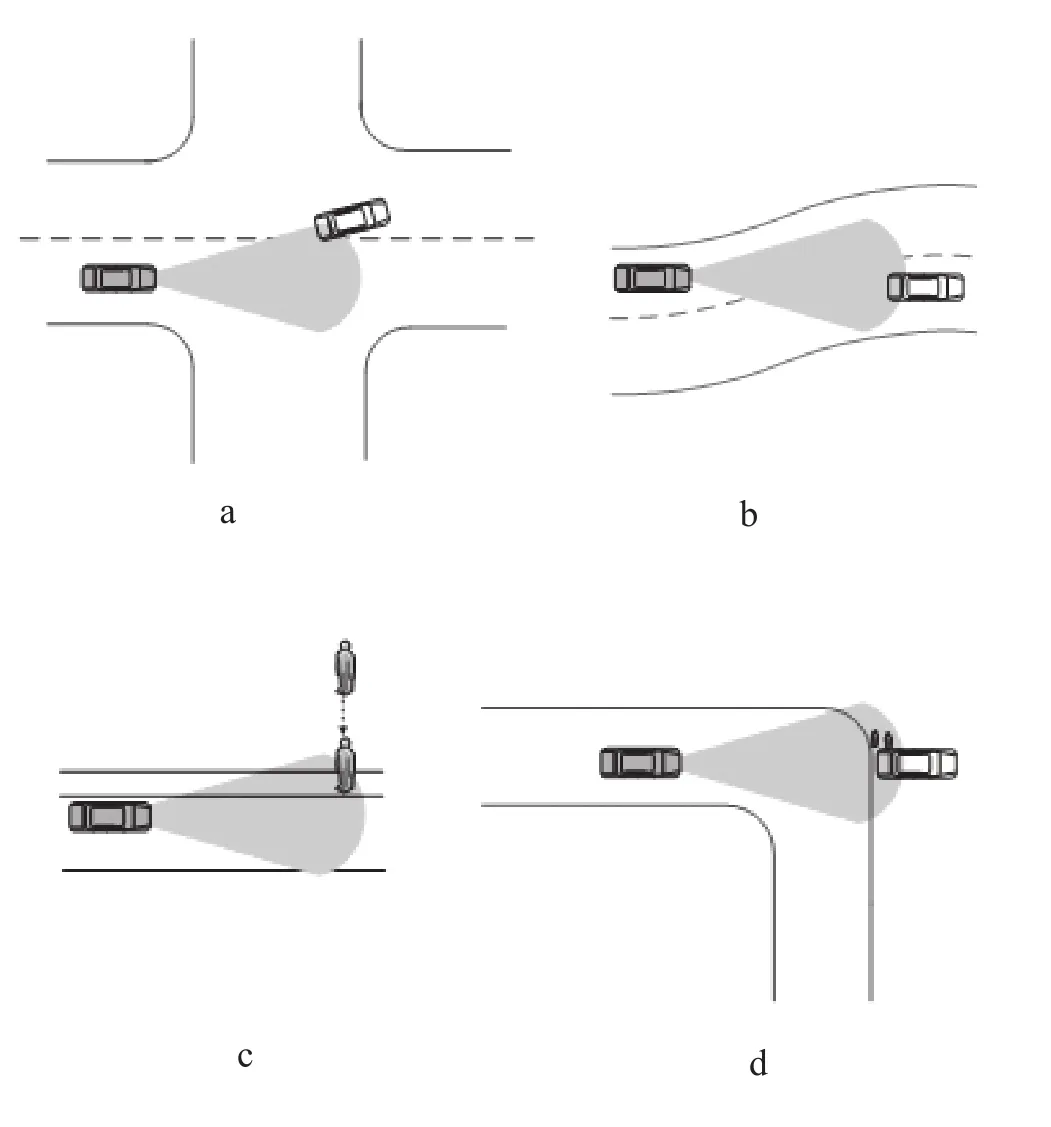
圖2 試驗(yàn)設(shè)計(jì)4場景
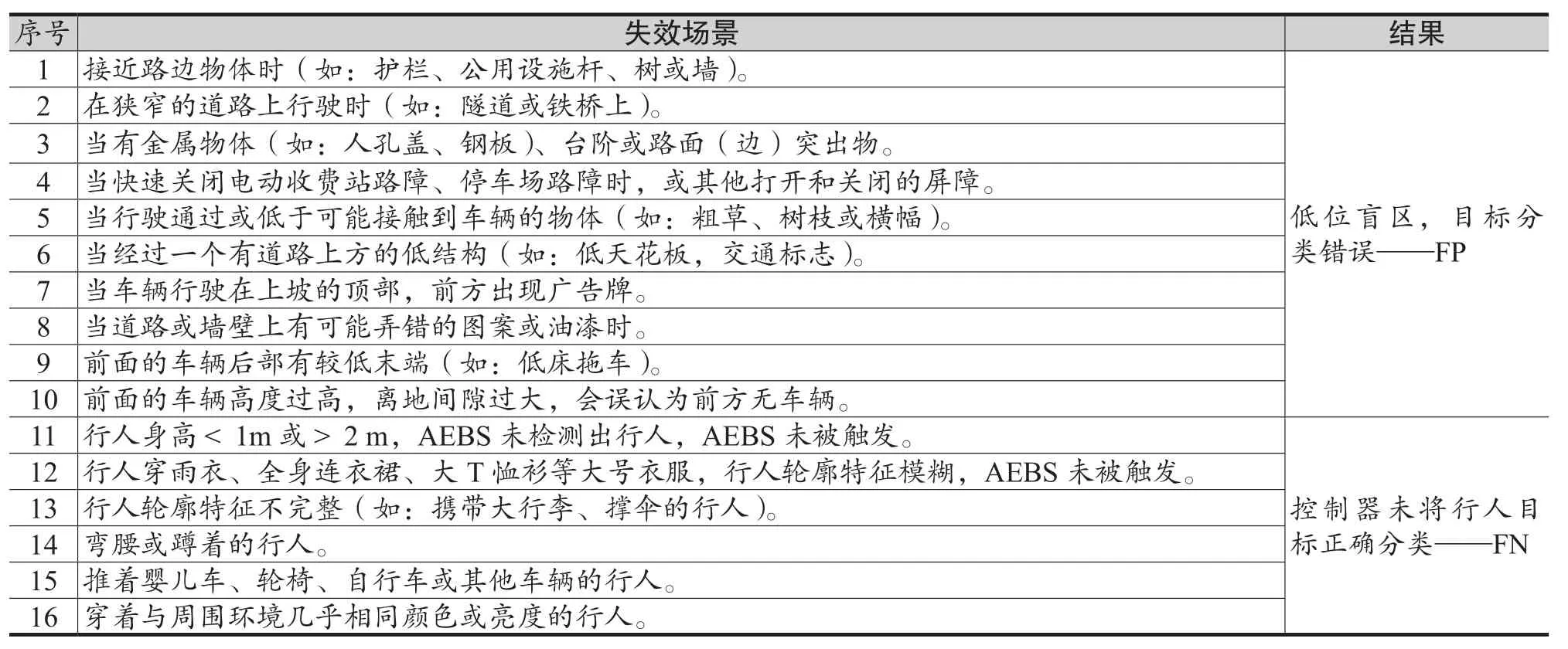
表3 2層目標(biāo)分類錯(cuò)誤導(dǎo)致碰撞的失效場景
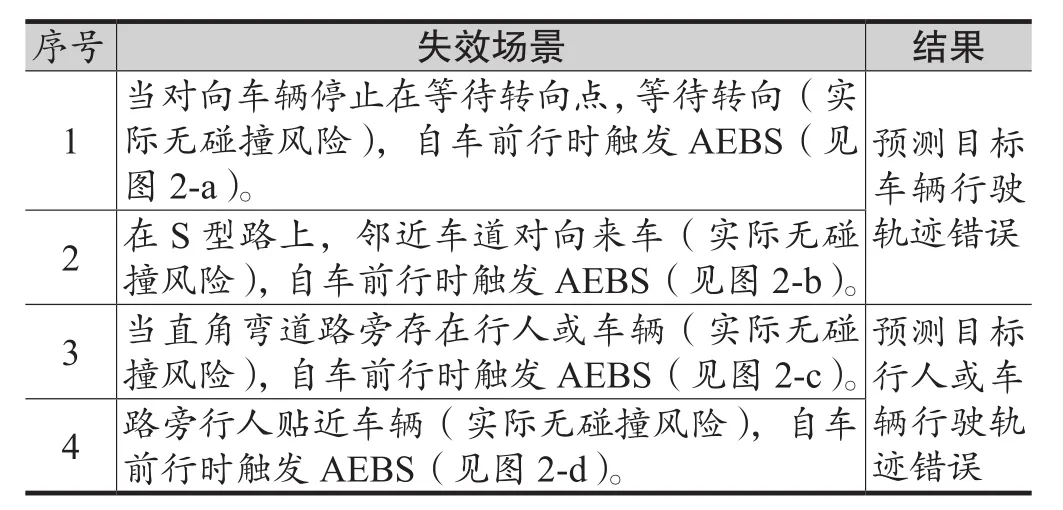
表4 3層FP失效場景

表5 4層決策失效導(dǎo)致碰撞場景——FN
圖3 誤認(rèn)為前方車輛與自車重疊率較小
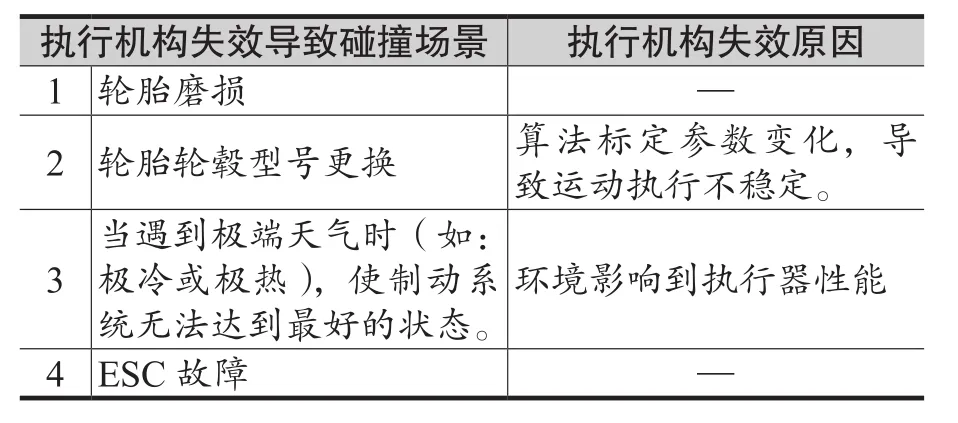
表6 5層執(zhí)行機(jī)構(gòu)失效導(dǎo)致碰撞場景——FN
在AEBS中,由于一般定義在任何情況下駕駛員均能超越AEBS功能,所以一般駕駛員可以通過加速和轉(zhuǎn)向來抑制和超越AEBS功能的制動(dòng)意圖或停止AEBS制動(dòng)功能。但在實(shí)際緊急情況下,存在駕駛員意圖制動(dòng)誤踩油門場景,所以將此場景作為一種失效場景。
4. 行人橫穿馬路AEBS失效場景試驗(yàn)
行人橫穿馬路AEBS失效場景設(shè)計(jì)與試驗(yàn)結(jié)果(見表7)。
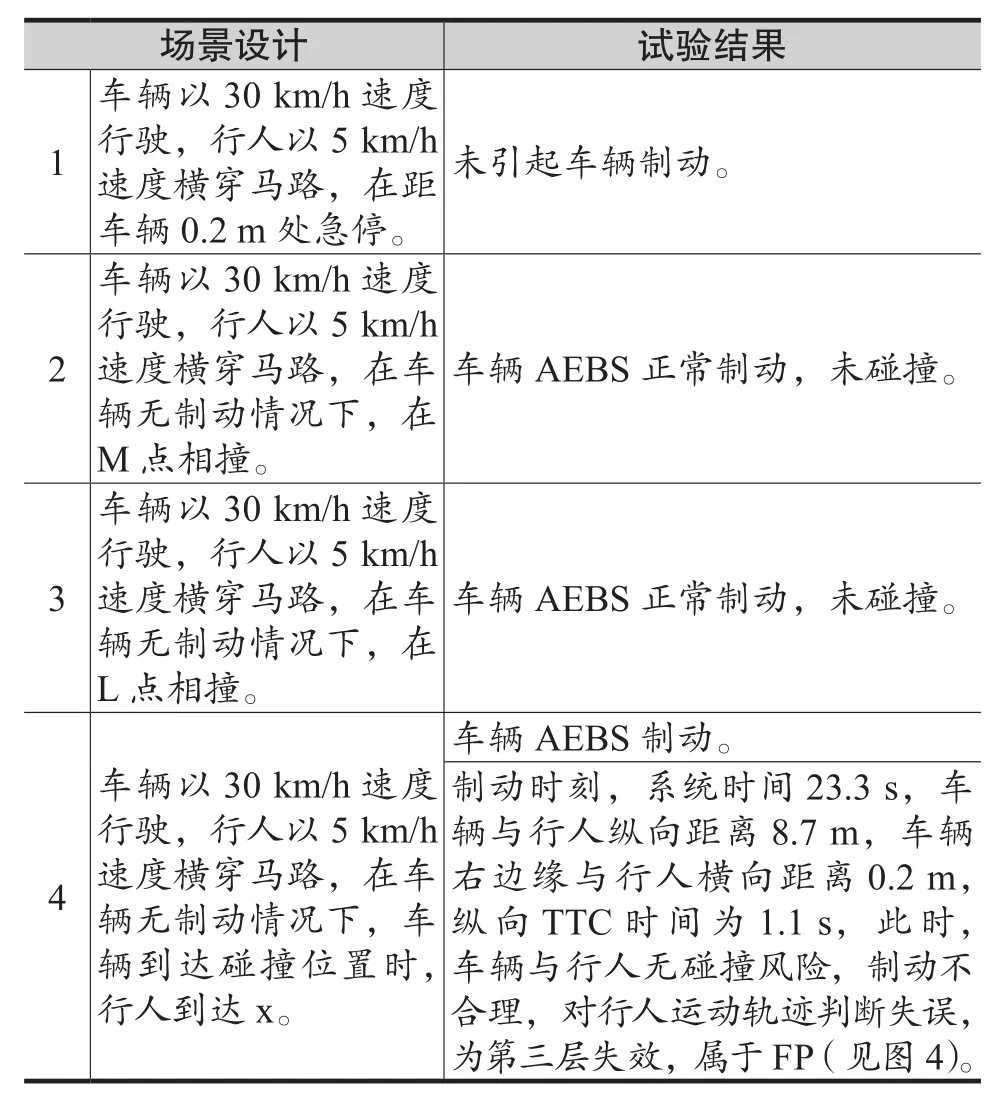
表7 行人橫穿馬路AEBS失效場景設(shè)計(jì)與試驗(yàn)結(jié)果
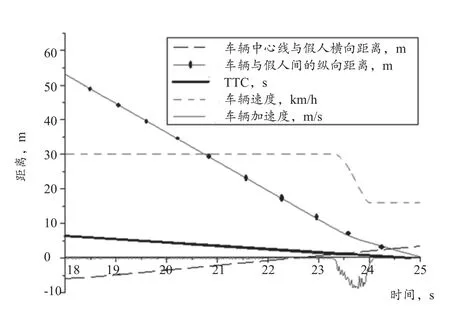
圖4 場景D試驗(yàn)曲線
三、成 果
本文總結(jié)了37種AEBS失效場景,運(yùn)用功能分解方法,對(duì)失效場景的失效功能層進(jìn)行定位。依據(jù)不同功能層進(jìn)行分類,從而能夠系統(tǒng)而有邊界地對(duì)AEBS功能進(jìn)行驗(yàn)證,希望此分類研究為進(jìn)一步改善AEBS功能提供借鑒。