純電動汽車再生制動能量回收控制算法的研究*
2019-11-22 08:29:10張霞蔡順燕
汽車實用技術 2019年21期
張霞,蔡順燕
純電動汽車再生制動能量回收控制算法的研究*
張霞,蔡順燕
(成都師范學院,成都 611130)
文章從目前已有的純電動汽車入手,從再生制動能量回收的角度分析如何延長純電動汽車的續航里程,將純電動汽車在制動過程中產生的慣性動能加以回收利用,以便讓純電動汽車的續航里程增長[1]。文章以軟件自帶純電動汽車例,選擇了主要組件的型號,控制策略,再對關鍵的組件建立Simulink模型,根據上述確定的控制策略和建立的Simulink模型,在基于Matlab/Simulink環境開發的仿真平臺Advisor環境中選定特定的循環工況,仿真運行,然后對仿真結果進行分析。文章提出的新的控制算法,參考國內外已有的控制策略,對當下advisor2002環境中系統自帶再生制動控制算法和將基于規則的綜合制動控制策略和模糊控制策略兩者結合起來綜合運用,進行分析比較兩種控制策略,在advisor2002中建立整車再生制動的模型,進行模擬仿真,從而驗證算法的優越性。
純電動汽車;再生制動能量回收;ABS控制系統;模糊控制算法
1 概述
電動汽車結構布局的特點原因,使得與傳統燃油汽車相比具有無法替代的優勢,比如可以提高電動汽車燃油經濟性的再生制動能量回收技術[1]。因為汽車在制動過程中,消耗的制動能量占汽車消耗能量的大半,因此如何在確保汽車制動安全性和行駛穩定性的條件下,合理分配汽車制動力矩,使電動汽車的制動能量得到更有效的回收,成為電動汽車制動能量回收系統關鍵問題。但是再生制動能力回收,在此制動過程中由于有電機制動力矩的引入,減輕了傳統制動器的摩擦熱損耗,并且提高了電動汽車制動的抗熱衰退性,同時被回收的制動能量可以延長汽車的續駛里程。由于電動汽車自身固有的技術難題目前為止沒有得到完全的解決,比如:快速充電設施不完善;單次充電的續駛里程短等問題,因此電動汽車在多方面任需加大研究力度,所以電動汽車制動能量回收成為目前研究的熱點之一。隨著科技的不斷發展,我們的物質生活得到了極大提高,但環境變得越發糟糕。讓空氣更加清晰,環境更為優美是當今社會所有人前進的方向。在當代中國,隨著汽車保有量的增長,汽車排放的尾氣已經列入污染源。尋找更加干凈,環保的汽車變為人們未來研究汽車的風向標,而新能源汽車就具有這些優點。
本文提出新的控制算法,參考國內外已有的控制策略,對當下advisor2002環境中系統自帶再生制動控制算法和將基于規則的綜合制動控制策略和模糊控制策略兩者結合起來綜合運用,對提高電動汽車的綜合性能有重大的意義。
2 國內外發展現狀
2.1 國外電動汽車的發展現狀
目下,歐美等發達國家尤其重視新能源汽車的開發,它們制定了非常多的優惠政策,只為能提升本國汽車產業的國際競爭力。歐洲生產商正在加大電動汽車技術的開發力度,瑞典沃爾沃、波蘭索拉麗斯等汽車公司都開發電動汽車。日本電動汽車被公認為是當前新能源汽車中比較具有開發前景的,其生產的電動汽車的燃油經濟性與排放性的效果都值得稱贊,節油率甚至達50%左右。美國政府對新能源汽車的研究和開發同樣也大力扶持,其動力系統是雙軸混合電驅動系統。歐洲對混合動力技術的開發主要集中在商用車領域[5]。
2.2 國內混合動力電動汽車的發展現狀
中國自主品牌汽車公司都加大了對新能源汽車的開發力度。國內新能源產業的相關發展已經進入了由科研轉向產業化、規模化的要塞時刻。新能源汽車在開發過程當中,混合動力汽車不謀而合地成為研究的主方向[5]。那么提高電動汽車的性能和技術,克服電動汽車的發展瓶頸是目前首要完成的工作,其中回收制動和減速能量再回收利用具有重要的意義。
3 整車再生制動的動力學建模
通過在制動假設前提下,建立的整車四輪制動動力學模型可以看出,輪胎在汽車行駛中既受側向力又受縱向力的作用,兩者共同影響著其操縱穩定性,且在驅動輪上連上電機就可以進行能量回收,圖1為建立的整車四輪制動動力學模型。
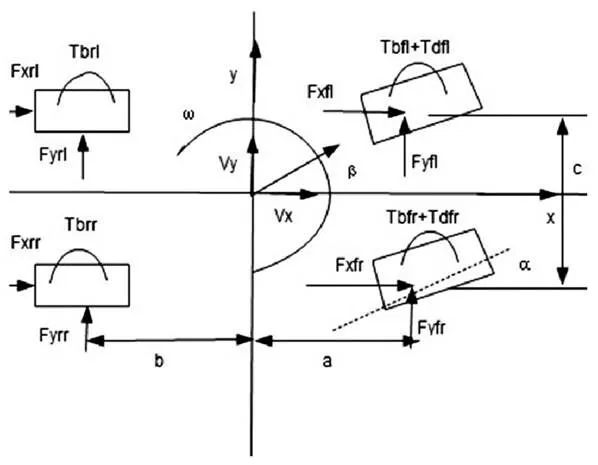
圖1 整車四輪的制動動力學模型
4 整車的能量效率
以安全制動為基礎,以實現電動汽車制動力矩的分配為前提,著眼于系統的能量回收效率,以純電動汽車為模型。在了解仿真環境基本概況的基礎上,反映出電機在不同控制算法下制動能量回收的多少[3],選擇整車的能量效率這個參數作為電動汽車再生制動控制算法優劣的評價指標。
整車的能量效率定義如(1)所示:
(1)式中,aero表示制動中外界消耗的能量;
rolling表示制動中外界消耗的能量,只替換算法不改變外部參數前提下;
aero和rolling的大小不變;
fueling表示輸入能量;一般一次制動中輸入的能量是不變的。
essstorage表示儲存能量。
5 Advisor仿真
在了解其受限因素的基礎上,啟動軟件,在里面進行相關參數設置,點擊View Block Diagram打開仿真模型,在ev模塊中對控制策略在不影響整車參數的情況下進行局部修改,對braking strategy模塊中的算法替換。
仿真數據的傳遞方向用仿真模型圖中箭頭方向代表。后向仿真路徑:箭頭從左至右表示進行,它的依據是下級模塊的需求運算獲得上級模塊的需求;前向仿真箭頭自右向左表示,它的依據上級模塊發出的功率到下級模塊得到的實際功率。該模型由:汽車駕駛工況、車輪車軸模塊、主減速器模塊、變速器模塊、電機及控制模塊、電氣負載模塊、蓄電池模塊、汽車整車模塊[1]幾個模塊組成。
6 模糊控制算法
電動汽車再生制動的控制策略有非常多種類,從汽車駕駛安全和能量回收兩方面考慮,提出邏輯門限、模糊控制結合在一起的優化最佳能量回收制動力分配策略,既能對控制系統的非線性特征進行有效控制,又使得該制動控制策略得到進一步的延伸和發展。
總所周知,模糊控制系統作為一種非線性智能控制系統,已普遍被運用并且在多個領域收獲了較好的控制成效。建立一種以滑移率為基礎的ABS模糊控制器SIMULINK框圖。
軟件系統中自帶的是前置前驅的汽車,輸入為汽車防抱死制動力、車身的車速并保持不變,輸出為前輪制動力。根據上述控制策略設置,查找Advisor2002系統中的數據表得到前驅純電動汽車前輪摩擦制動力分配系數和前輪電機再生制動力分配系數,根據汽車所需總防抱死制動力先計算出后輪所需的制動力;對前輪上所需的總制動力按照設計的算法進行重新分配。在braking strategy模塊對控制算法進行修改。因為從traction control模塊中,輸出的force required對應策略slip-limited force red即是防滑所需力,所以沒有直接體現出ABS的作用,得到的防滑驅動力,對應到模糊控制策略模塊中就是ABS所需制動力[1]。在滿足其預分配的前提下,著重進行的是二次重新分配驅動輪上的制動力。根據這樣的方法即既沒有使車輪發生抱死,又將設計的算法合理的嵌入其中[1]。
7 Advisor2002仿真運行結果分析
通過以上建立模型和仿真控制策略的重新設計,修改所需參數,設置所需參數,點擊運行按鈕,分別得到圖2和圖3的仿真結果。圖5是對軟件自帶控制算法的仿真結果圖,圖6是模糊控制算法的仿真結果圖。
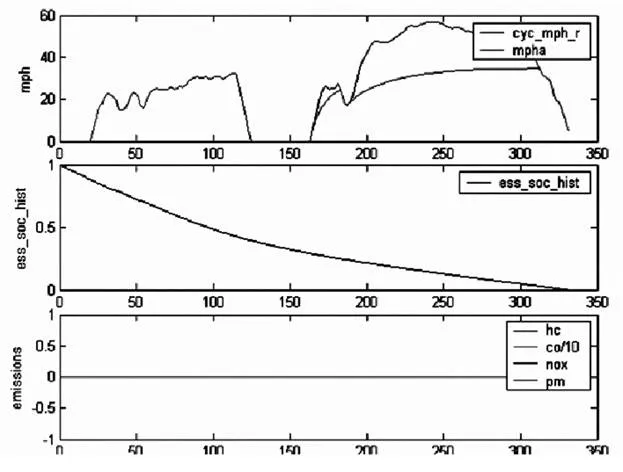
圖2 advisor2002自帶控制算法下仿真結果
對比對圖2和圖3曲線變化,可以得出在相同的行駛工況下模糊控制算法要比自帶的控制算法優越,系統整體的效率在模糊算法下要比軟件自帶的控制算法明顯改善了許多,由自帶算法下的0.065提高到了模糊算法后的0.101,能量回收率提高了35.2%,仿真結果表明雙能量源純電動的經濟性和動力性都得到了提高。由仿真數據結果顯示:能在滿足制動條件的前提下,電動汽車的再生制動或減速過程,延長電動汽車的續駛里程、提高其經濟性便可以通過回收再生制動能量實現。
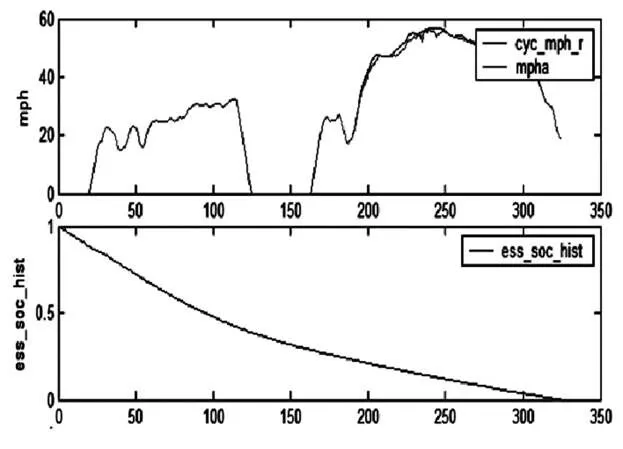
圖3 新設計模糊控制算法的仿真結果
8 結論
本文參照軟件系統自帶純電動汽車數據為模型進行整車的建模,分析了常用的幾種再生制動策略的優缺點,從中選擇了合適的策略且在這個框架下推出一套再生制動模糊控制算法,再生制動模糊控制算法可以達到最大的能量回收,在仿真環境中對系統自帶控制算法和再生制動模糊控制算法進行了比較驗證,從仿真結果圖以及數據分析,得出設計模糊控制算法對改進車輛的能量回收利用率上明顯提高了,有一定的現實參考借鑒價值。
[1] 劉喜明.電動汽車再生制動能力回饋控制技術研究[D].西華大學博士論文.2012.
[2] 汪貴平.純電動汽車驅動與制動能力回收控制策略研究[D].長安大學博士論文.2009.
[3] 方亞洲.純電動汽車再生制動遺傳算法優化的模糊控制策略的實現與仿真[J].北京汽車.2016.
[4] 王紅霞.電動汽車再生制動能量回收控制策略研究[D].河南農業大學博士論文.2012.
[5] 劉忠政.重型混合動力汽車動力性與經濟性的仿真分析[D].河南科技大學碩士論文.2014.
Research on Regenerative Energy Recovery Control Algorithm for ABSBased on Pure Electric Vehicle*
Zhang Xia, Cai Shunyan
(Chengdu Normal University, Sichuan Chengdu 611130)
Starting from the existing pure electric vehicles, this paper analyzes how to extend the mileage of pure electric vehicles from the point of view of regenerative braking energy recovery, and recycle the inertial kinetic energy generated by pure electric vehicles during braking. In order to increase the mileage of pure electric vehicles[1], And, in this paper, a new control algorithm is put forward. With reference to the existing control strategies at home and abroad, the system's own regenerative braking control algorithm and the rules-based comprehensive braking control strategy and fuzzy control strategy are combined and analyzed and compared. The dynamic model of vehicle regenerative braking is established and simulated in software to verify the superiority of the algorithm.
BEV; Regenerative braking energy recovery; ABS control system; Fuzzy Control
B
U469.7
B
1671-7988(2019)21-38-03
張霞(1986-),女,講師,就職于成都師范學院,研究方向:汽車與機械電子。
1.成都師范學院教改項目(2019 JG18);2.成都師范學院教改項目(2018JG39);3.四川省2018-2020年高等教育人才培養質量和教學改革項目(JG2018-894);4.成都師范學院校級應用型示范專業建設項目(2018XJYYZY01);5.四川省應用型示范專業建設項目(SJYYSFZY180);6.本研究得到四川省高等學校人文社會科學重點研究基地·四川中小學教師師德研究中心課題(項目編號:CJSD17-29)資助;7.四川省教育廳項目(17ZB0073)。
CLC NO.:U469.7
10.16638/j.cnki.1671-7988.2019.21.013
1671-7988(2019)21-38-03
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
能源工程(2020年6期)2021-01-26 00:55:22
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
光學精密工程(2016年6期)2016-11-07 09:07:19
作文大王·低年級(2016年4期)2016-04-18 00:24:37
通信電源技術(2016年1期)2016-04-16 04:57:26
