基于預(yù)測(cè)碰撞點(diǎn)帶落角約束的導(dǎo)引律設(shè)計(jì)
2019-11-19 09:05:14史紹琨趙久奮
火力與指揮控制 2019年10期
史紹琨,趙久奮,尤 浩
(火箭軍工程大學(xué),西安 710025)
0 引言
為了增強(qiáng)導(dǎo)彈的毀傷能力,需要考慮復(fù)雜地形條件下目標(biāo)的運(yùn)動(dòng)傾角,控制導(dǎo)彈以指定的角度攻擊目標(biāo)[1]。偏置比例導(dǎo)引律可以實(shí)現(xiàn)對(duì)落角進(jìn)行控制,具有結(jié)構(gòu)簡(jiǎn)單、推導(dǎo)方便、易于控制的優(yōu)點(diǎn)[2]。關(guān)于實(shí)現(xiàn)落角約束的偏置比例導(dǎo)引律最早的研究,是Lee 等[3]在假設(shè)偏置項(xiàng)為常數(shù)的條件下,推導(dǎo)了帶落角約束的偏置比例導(dǎo)引律。此后,不斷有研究對(duì)偏置比例導(dǎo)引律進(jìn)行變形推導(dǎo),但大多是針對(duì)地面固定目標(biāo)實(shí)現(xiàn)帶落角約束的制導(dǎo)控制,針對(duì)帶傾角運(yùn)動(dòng)目標(biāo)實(shí)現(xiàn)落角控制的偏置比例導(dǎo)引律鮮有報(bào)道。因此,本文針對(duì)坦克、地面裝甲車(chē)等運(yùn)動(dòng)目標(biāo),設(shè)計(jì)了攻擊運(yùn)動(dòng)目標(biāo)的偏置比例導(dǎo)引律。此外,制導(dǎo)律中涉及的一個(gè)重要參數(shù)是剩余飛行時(shí)間(tgo)[4]。剩余飛行時(shí)間(tgo)估計(jì)的準(zhǔn)確與否,直接關(guān)系到脫靶量、過(guò)載等重要制導(dǎo)性能。因此,設(shè)計(jì)精準(zhǔn)的剩余飛行時(shí)間估計(jì)方法也是本文研究的重要問(wèn)題。
文獻(xiàn)[5]推導(dǎo)了針對(duì)地面固定目標(biāo)帶落角約束的偏置比例導(dǎo)引律,并在考慮彈道曲率的情況下對(duì)剩余飛行時(shí)間進(jìn)行了較為精確的估算。文獻(xiàn)[6]在線性RPN/PN 制導(dǎo)律條件下,針對(duì)順軌和逆軌飛行軌跡的特點(diǎn),基于預(yù)測(cè)碰撞點(diǎn)對(duì)剩余飛行時(shí)間進(jìn)行估計(jì)。文獻(xiàn)[7]將剩余飛行時(shí)間的計(jì)算轉(zhuǎn)化為求解導(dǎo)彈前置角γ 變化到0 的時(shí)間,對(duì)剩余飛行時(shí)間進(jìn)行估算;文獻(xiàn)[8]在未考慮目標(biāo)運(yùn)動(dòng)傾角的情況下,設(shè)計(jì)了帶落角約束的偏置比例導(dǎo)引律,并與其他導(dǎo)引律進(jìn)行了仿真比較。
本文在文獻(xiàn)[5-8]的基礎(chǔ)上推導(dǎo)了攻擊運(yùn)動(dòng)目標(biāo)帶落角約束的偏置比例導(dǎo)引律,并對(duì)導(dǎo)引律中出現(xiàn)的重要參數(shù)剩余飛行時(shí)間tgo進(jìn)行基于預(yù)測(cè)碰撞點(diǎn)的剩余飛行時(shí)間估計(jì)。最后將設(shè)計(jì)的剩余飛行時(shí)間估計(jì)方法代入推導(dǎo)得到的導(dǎo)引律,并分析了導(dǎo)引律的性能。
1 攻擊運(yùn)動(dòng)目標(biāo)帶落角約束的偏置比例導(dǎo)引律設(shè)計(jì)
考慮二維平面內(nèi)導(dǎo)彈攻擊運(yùn)動(dòng)目標(biāo)情況,彈目相對(duì)運(yùn)動(dòng)關(guān)系[9]如圖1 所示。
圖1 中OXY 是地面慣性坐標(biāo)系,M、T、P 分別表示導(dǎo)彈、目標(biāo)和彈目碰撞點(diǎn)。an為導(dǎo)彈法向加速度,R 表示彈目視線。q 為彈目視線角,規(guī)定由彈目視線R 逆時(shí)針旋轉(zhuǎn)到水平基準(zhǔn)線時(shí)為正;θm和σm表示導(dǎo)彈的前置角和彈道傾角,規(guī)定導(dǎo)彈速度vm順時(shí)針轉(zhuǎn)向彈目視線R 時(shí)前置角θm為正,規(guī)定導(dǎo)彈速度vm位于水平基準(zhǔn)線下方時(shí)彈道傾角σm為正。θt和σt表示目標(biāo)的前置角和彈道傾角,θt和σt的正負(fù)定義同θm和σm相同。vm和vt表示導(dǎo)彈和目標(biāo)的速度,假設(shè)都為常值。則彈目相對(duì)運(yùn)動(dòng)方程[10-11]為:

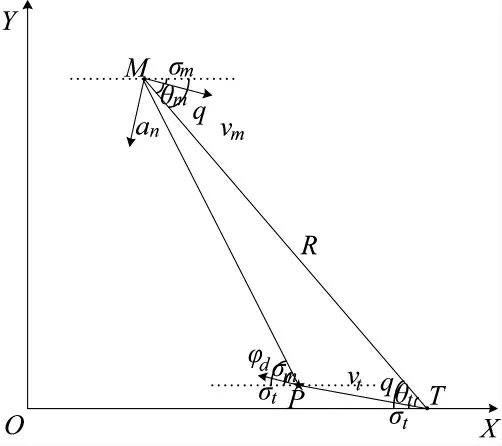
圖1 彈目相對(duì)運(yùn)動(dòng)關(guān)系示意圖
導(dǎo)彈的運(yùn)動(dòng)方程為
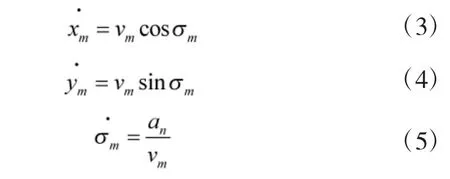
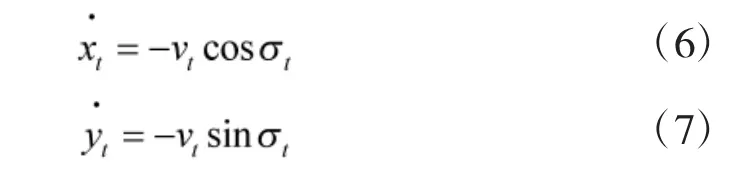
目標(biāo)的運(yùn)動(dòng)方程為
聯(lián)系方程為

制導(dǎo)方程為

式中:N 為比例系數(shù),aB為偏置項(xiàng),通過(guò)在傳統(tǒng)比例導(dǎo)引的基礎(chǔ)上增加一項(xiàng)偏置項(xiàng)來(lái)實(shí)現(xiàn)對(duì)落角的控制。
進(jìn)行帶落角約束偏置比例導(dǎo)引律設(shè)計(jì)的核心是制導(dǎo)方程的求解,制導(dǎo)方程求解的關(guān)鍵是偏置項(xiàng)aB的解算,下面將進(jìn)行偏置項(xiàng)aB的推導(dǎo)。
將式(10)代入式(5),得到

根據(jù)導(dǎo)數(shù)的定義,在某一小段時(shí)間Δt 內(nèi),有

式中,下標(biāo)t 和t+Δt 分別表示Δt 時(shí)間段的初始時(shí)刻和末時(shí)刻,假設(shè)aB在每個(gè)Δt 時(shí)間段內(nèi)均為常數(shù),則將式(12)中的Δt 擴(kuò)展到整個(gè)飛行時(shí)間tf,并在方程兩邊同時(shí)乘以tf得

式中,下標(biāo)0 和f 分別表示飛行過(guò)程的初始時(shí)刻和末時(shí)刻。將式(13)整理變形,并將總飛行時(shí)間tf用當(dāng)前時(shí)刻剩余飛行時(shí)間tgo表示,初始時(shí)刻t0用當(dāng)前時(shí)刻t 表示,得到aB的表示式為

設(shè)導(dǎo)彈攻擊目標(biāo)的期望攻擊角為φd,則根據(jù)圖1 中的幾何關(guān)系,有

根據(jù)彈目相對(duì)運(yùn)動(dòng)方程式(2),當(dāng)導(dǎo)彈擊中目標(biāo)R(tf)=0 時(shí),有

即

令

得到

將式(15)、式(19)代入到式(14)中得到aB的最終表達(dá)式為
將式(20)代入到式(10),則攻擊運(yùn)動(dòng)目標(biāo)帶落角約束偏置比例導(dǎo)引律的制導(dǎo)方程為
2 基于預(yù)測(cè)碰撞點(diǎn)的剩余飛行時(shí)間估計(jì)
基于預(yù)測(cè)碰撞點(diǎn)的剩余飛行時(shí)間估計(jì)的核心思想是通過(guò)預(yù)測(cè)出彈目碰撞點(diǎn),然后按照攻擊靜止目標(biāo)的剩余飛行時(shí)間估算方法進(jìn)行估計(jì)[14]。因此,最后的估計(jì)準(zhǔn)確與否與以下兩步有關(guān):1)攻擊靜止目標(biāo)帶落角約束的剩余飛行時(shí)間估計(jì)準(zhǔn)確與否。2)彈目碰撞點(diǎn)預(yù)測(cè)的準(zhǔn)確與否。
考慮導(dǎo)彈攻擊運(yùn)動(dòng)目標(biāo)情況,假設(shè)最終攻擊點(diǎn)為P,導(dǎo)彈攻擊運(yùn)動(dòng)目標(biāo)的示意圖如圖2 所示。
圖2 導(dǎo)彈攻擊運(yùn)動(dòng)目標(biāo)示意圖
根據(jù)文獻(xiàn)[5]攻擊靜止目標(biāo)得到的結(jié)論,則導(dǎo)彈直接攻擊位于預(yù)測(cè)碰撞點(diǎn)P 的靜止目標(biāo)時(shí)的剩余飛行時(shí)間為
式中,Rm為導(dǎo)彈到預(yù)測(cè)碰撞點(diǎn)的距離,γ 為導(dǎo)彈速度方向與Rm的夾角,β 為Rm與初始彈目視線R 的夾角。因?yàn)镽m,γ,β 未知,下面要做的工作是用已知量代替。
在△MTP 中,根據(jù)幾何關(guān)系,有
在β 和θt為小值時(shí),式(23)、式(24)可以簡(jiǎn)化為


在目標(biāo)做勻速直線運(yùn)動(dòng)的前提下,有

為了便于計(jì)算,令

將式(22)、式(27)、式(28)代入式(25),化簡(jiǎn)后按照泰勒級(jí)數(shù)方法展開(kāi)并取有效值為
這些問(wèn)題制約著高等職業(yè)教育的發(fā)展,需要根據(jù)市場(chǎng)變化和社會(huì)與經(jīng)濟(jì)的發(fā)展進(jìn)行改革,深化工學(xué)結(jié)合,建立以職業(yè)能力培養(yǎng)為核心的高職教育人才培養(yǎng)模式。

將式(30)代入到式(27),化簡(jiǎn)得

根據(jù)圖2 中的幾何關(guān)系,有

將式(29)、式(30)、式(31)代入到式(22),最終得到基于預(yù)測(cè)碰撞點(diǎn)的帶落角約束的剩余飛行時(shí)間估計(jì)為
3 仿真結(jié)果與分析
假設(shè)用導(dǎo)彈攻擊地面運(yùn)動(dòng)目標(biāo),基本參數(shù)設(shè)置如下:導(dǎo)彈和目標(biāo)的初始位置分別為(5 000 m,5 000 m),(10 000 m,0 m);導(dǎo)彈和目標(biāo)的速度恒定,分別為vm=300 m/s,vt=30 m/s;比例系數(shù)N=3。導(dǎo)彈的初始導(dǎo)彈傾角為0°,目標(biāo)的傾角設(shè)置為0°,期望導(dǎo)彈落角為-30°;分別用傳統(tǒng)剩余飛行時(shí)間估計(jì)方法,文獻(xiàn)[5-6]得到的剩余飛行時(shí)間估計(jì)方法和本文得到的剩余飛行時(shí)間方法代入本文推導(dǎo)得到的制導(dǎo)律,得到仿真結(jié)果如表1 和圖3、圖4 所示。
表1 不同剩余飛行時(shí)間下導(dǎo)彈參數(shù)
從表1 中可以看出,在本文設(shè)計(jì)的剩余飛行時(shí)間下脫靶量和落角誤差最小,尤其對(duì)落角的控制能力要明顯好于其他3 種剩余時(shí)間估計(jì)。從圖3 和圖4 中可以看出,本文的剩余飛行時(shí)間估計(jì)精度要優(yōu)于其他3 種剩余時(shí)間估計(jì),傳統(tǒng)估計(jì)方法次之,因?yàn)槲墨I(xiàn)[5-6]中的剩余飛行時(shí)間估計(jì)是在特定的制導(dǎo)律下設(shè)計(jì)的,因此,不適用于本文推導(dǎo)得到的制導(dǎo)律。下面將研究將本文得到的基于預(yù)測(cè)碰撞點(diǎn)的剩余時(shí)間估計(jì)tg0代入本文設(shè)計(jì)的攻擊運(yùn)動(dòng)目標(biāo)的帶落角約束偏置比例導(dǎo)引律的性能。
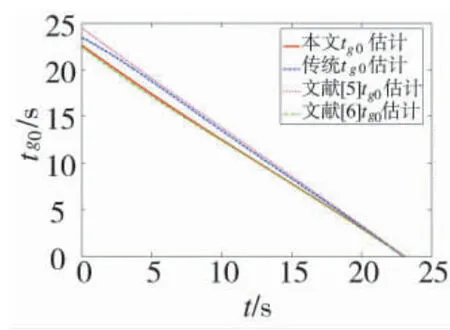
圖3 剩余飛行時(shí)間變化曲線
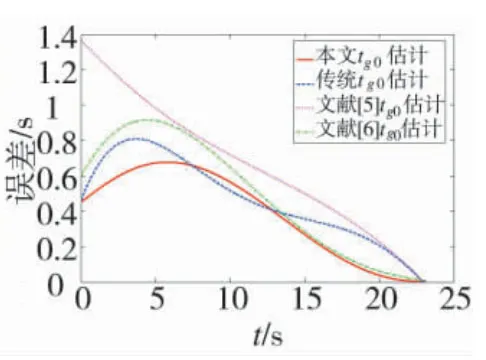
圖4 剩余飛行時(shí)間誤差變化曲線
假設(shè)導(dǎo)彈攻擊地面帶傾角運(yùn)動(dòng)目標(biāo),設(shè)置目標(biāo)傾角為σt=20°,導(dǎo)彈和目標(biāo)的其他基本參數(shù)設(shè)置同上。設(shè)定制導(dǎo)盲區(qū)距離為20 m,導(dǎo)彈進(jìn)入制導(dǎo)盲區(qū)后按進(jìn)入制導(dǎo)盲區(qū)瞬時(shí)的法向過(guò)載飛行。將本文設(shè)計(jì)的基于預(yù)測(cè)碰撞點(diǎn)的剩余時(shí)間估計(jì)tg0代入本文推導(dǎo)的攻擊運(yùn)動(dòng)目標(biāo)帶落角約束的偏置比例導(dǎo)引律,仿真得到導(dǎo)彈主要特征變化如圖5~圖8 所示。
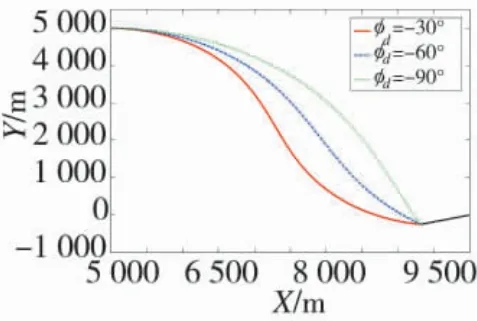
圖5 導(dǎo)彈和目標(biāo)軌跡

圖6 彈道傾角變化曲線
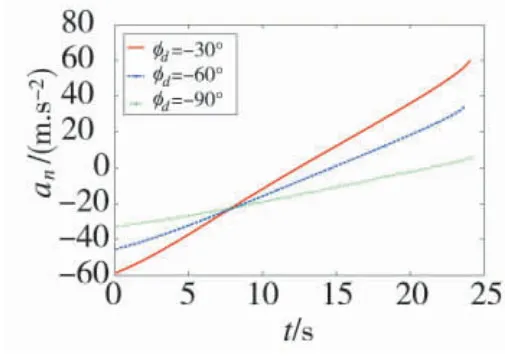
圖7 過(guò)載變化曲線
圖8 剩余飛行時(shí)間變化曲線
從圖5~圖6 中可以看出,本文設(shè)計(jì)的攻擊運(yùn)動(dòng)目標(biāo)帶落角約束的偏置比例導(dǎo)引律在不同的期望落角條件下都可以擊中目標(biāo)且滿足落角約束;從圖7 中可以看出,不同的期望落角條件下的過(guò)載都在合理的范圍內(nèi),且隨著期望落角的增大,過(guò)載減小。從圖8 中可以看出期望落角為-60°時(shí)飛行時(shí)間最短,期望落角為-90°時(shí)飛行時(shí)間最長(zhǎng),且不同期望落角下剩余飛行時(shí)間估計(jì)誤差不同,這是由于在不同的期望落角下彈道的長(zhǎng)度和曲率不同造成的。
仿真得到的具體參數(shù)隨時(shí)間的變化如表2所示。
表2 不同期望落角下導(dǎo)彈參數(shù)
從表2 中可以看出,本文設(shè)計(jì)的攻擊運(yùn)動(dòng)目標(biāo)的偏置比例導(dǎo)引律在不同的期望落角條件下脫靶量和落角誤差都較小,過(guò)載維持在合理的區(qū)間內(nèi)。可以得到結(jié)論:本文設(shè)計(jì)的攻擊快速運(yùn)動(dòng)目標(biāo)帶落角約束的偏置比例導(dǎo)引律較文獻(xiàn)[8]設(shè)計(jì)的偏置比例導(dǎo)引律脫靶量和落角誤差有了顯著的減小,且過(guò)載方面有了明顯的改進(jìn),可以實(shí)現(xiàn)對(duì)帶傾角運(yùn)動(dòng)目標(biāo)的指定角度攻擊。
4 結(jié)論
本文推導(dǎo)了攻擊運(yùn)動(dòng)目標(biāo)帶落角約束的偏置比例導(dǎo)引律,并在該偏置比例導(dǎo)引律下設(shè)計(jì)了基于預(yù)測(cè)碰撞點(diǎn)的剩余時(shí)間估計(jì)方法。通過(guò)與3 種不同剩余飛行時(shí)間估計(jì)方法的比較,驗(yàn)證了在本文推導(dǎo)的導(dǎo)引律下,本文設(shè)計(jì)的剩余飛行時(shí)間估計(jì)方法更精準(zhǔn);將本文設(shè)計(jì)的tg0估計(jì)方法代入本文設(shè)計(jì)的導(dǎo)引律進(jìn)行仿真驗(yàn)證,結(jié)果表明:本文設(shè)計(jì)的導(dǎo)引律可以指定角度攻擊帶傾角運(yùn)動(dòng)目標(biāo),對(duì)于攻擊復(fù)雜地形下的坦克、地面裝甲車(chē)等帶傾角運(yùn)動(dòng)目標(biāo),具有一定的實(shí)際應(yīng)用價(jià)值。