一種基于最優在線無偏估計的空間配準方法*
2019-11-19 09:05:16常超偉王世鋒李麗君黃義杰
火力與指揮控制 2019年10期
常超偉,王世鋒,李麗君,黃義杰,宋 航
(1.北方自動控制技術研究所,太原 030006;2.山西財經大學金融學院,太原 030006)
0 引言
當代空中監視系統是由能夠提供位于傳感器公共覆蓋區域內的目標數據的傳感器網絡組成,一個監視系統的目標就是通過從傳感器獲得的原始數據計算和顯示出目標的真實狀態。傳感器是要融合的數據源,所以數據融合系統成為所有監視系統的一個主要方面。數據融合系統聯合傳感器探測從而達到比來自于單傳感器探測更好的精度和魯棒性等。
由于傳感器上報的量測中包含有隨機誤差和系統誤差部分,隨機誤差可以使用濾波的方法消除,但是系統誤差通過濾波是消除不了的,必須使用傳感器配準的方法消除。而在多傳感器量測中系統誤差的存在不同程度地降低了數據融合系統的性能,例如當多部傳感器進行數據融合時,各傳感器系統誤差的存在可能導致航跡的分裂和誤相關,使融合航跡的精度變差,不能最佳地達到多傳感器組網的目的。如圖1,傳感器A 和B 的量測都存在偏差,如果不對其進行估計和補償,則真實目標就會被融合中心誤認為是兩個目標,從而導致航跡的分裂。即使融合中心判定兩傳感器的量測來源于同一目標,融合后的航跡容易出現鋸齒效應,如圖2 所示。

圖1 源于單目標的多條航跡
圖2 航跡的不穩定性
由上圖可見,傳感器配準在數據融合系統中是不可避免和必須的。然而系統誤差的來源有很多方面,包含距離、方位和俯仰偏差、距離增益誤差、傳感器定位誤差和傳感器定姿誤差等。一些誤差源是靜態的并且可以利用試驗飛行數據進行離線估計,但是另一些誤差源則是時變的。因此,需要使用一種在線的估計方法,當接收到新的量測時更新估計參數,從而保證要融合的多傳感器數據一直是無偏的,這種方法就是最優在線無偏估計[1]方法。文獻[1]中提出的一種最優在線無偏估計(BLUE)方法是基于二維公共直角坐標系內平移變換的,不能直接在實際工程中應用。鑒于此,本文面向工程應用將該方法從二維場景推廣到三維場景,從平移變換推廣到基于ECEF(地心直角坐標系)坐標轉換的BLUE 方法,然后與最小二乘估計方法、廣義最小二乘估計方法進行仿真比較;同時將改進后的方法應用到相對空間配準問題中,對工程應用具有一定的參考價值。
1 基于ECEF 坐標轉換的BLUE 方法
1.1 絕對空間配準問題的量測組織結構及算法推導
對于可用數據的處理有幾種可能的方法。一種是基于目標航跡和傳感器偏差的聯合估計,另一種是利用不同傳感器探測到的源于同一目標的量測之差。文獻[1]中采用的是第2 種方法,它能達到與第1 種相似的性能。
系統實際的輸入為量測位置,想要用量測之差來進行估計。問題是,哪一個量測對應該被使用來表示這個作為偏差估計中偏差的差別?圖3 用來作為潛在數據組織方法討論的一個參考。圖中的第1行描述了時間線上3 部雷達關于同一目標量測的錄取時間。雷達的符號分別為:圓代表雷達1,正方形為雷達2,三角形為雷達3。
圖3 量測組織方法
對于估計問題的傳統方法是基于偏差估計的獨立量測之差的利用。換句話說,一個量測是用作一個并且只用作這個量測之差,避免了包含被算法處理的相關量測之差。這種方法的一個例子如圖3(a),只有4 個建立的量測之差。如圖3(b)所示,這些數據鏈包含所有的可用信息,需要注意的是這里有一個相連的量測之差間的相關性:它們共用量測之差中的一個測量,測量中的誤差映射到所有的量測之差中。這個主要的差別是考慮到圖3(a)中傳統的方法,當中一半的可用信息被使用。
具體算法推導過程如下:

正如在上一部分指出的,量測按時間排列,量測之差通過每一個量測和同一個目標的前一個量測求得:

為了保證一致性,將量測按時間排列是必要的。這個關系表示為:

第i 個下標為每一個量測對之差,εi+1,i為兩個量測的聯合調整誤差。
考慮到包含量測之差的整個向量的協方差矩陣,它直接與每個量測的協方差矩陣Ri有關。
單獨的協方差陣Ri是由雷達參數和假定的線性近似得到:
從而
最終,BLUE 估計結果可由以下得到:

最小二乘方法只是沒有考慮隨機噪聲的影響,所以估計公式中沒有協方差陣,可將式(4)修改為

如果將式(4)中的協方差陣R 改為
即得到廣義最小二乘方法中的估計結果

1.2 相對空間配準問題的量測組織結構
上述BLUE 方法適用于多雷達多目標場景下的絕對系統誤差估計問題,對傳感器分布和目標的數量及分布要求較高,因此,在實際工程應用中受到了一些限制。
在融合系統對雷達探測精度要求不是很高時,采用相對配準的方法來估計各雷達的系統誤差以足夠滿足系統的需求。所以,此時可以設定精度最高的一部雷達作為主站,其他雷達作為從站,對各從站的相對系統誤差進行估計。這時圖3(b)中的量測組織結構可進行如下改進,如圖4 所示,其余算法推導過程和1.1 節中相同。
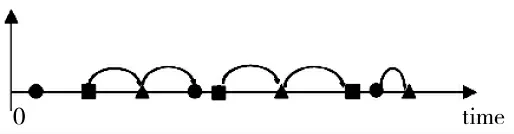
圖4 相對配準應用中的量測組織結構
在圖4 中,令1 部精度最高的雷達(如雷達3)作為主站,在進行量測處理時,因為只需要估計雷達1、雷達2 相對于雷達3 的系統誤差,所以在量測處理上只需要處理雷達1 與雷達3 量測之差、雷達2 與雷達3 量測之差。
2 BLUE 方法與LS/GLS 方法的仿真比較
在第1 部分推導的基于ECEF 坐標轉換的空間配準的基礎上,使用塊處理的思想,對BLUE 方法和最小二乘估計方法、廣義最小二乘估計方法在多種場景下進行了仿真比較。
仿真場景為:雷達1 位置(34°,110°,200 m)、系統誤差(100 m,0.3°,0.2°)、隨機誤差(60 m,0.1°,0.1°)、增益誤差K1=0.004;雷達2 位置(35°,110°,200 m)、系統誤差(-100 m,0.3°,0.2°)、隨機誤差(60 m,0.1°,0.1°)、增益誤差K2=0.005;雷達3 位置(34°,111°,200 m)、系統誤差(-10 m,0.05°,0.05°)、隨機誤差(60 m,0.1°,0.1°)、增益誤差K2=0.003。
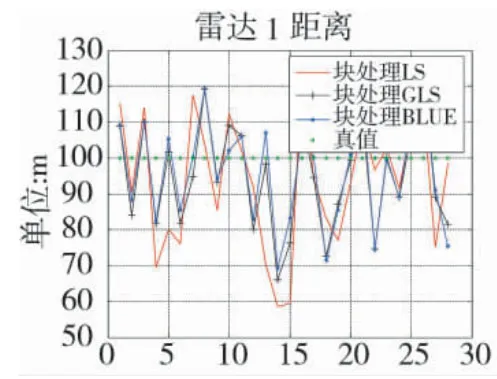
圖5 雷達1 距離誤差估計
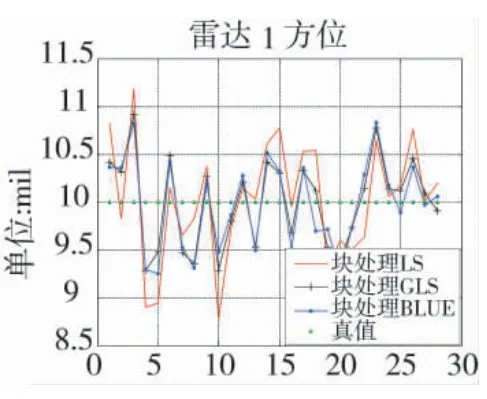
圖6 雷達1 方位誤差估計
從圖5~下頁圖13 中可以直觀地看出,利用BLUE 配準算法進行系統誤差估計的結果要優于傳統方法(LS)估計的結果。表1~表3 中為3 種方法估計得到的系統誤差與誤差真值之間的誤差均值和方差,BLUE 方法估計誤差的均值和方差基本小于LS 和GLS 方法的估計結果,再次從數值上驗證了BLUE 方法的性能。
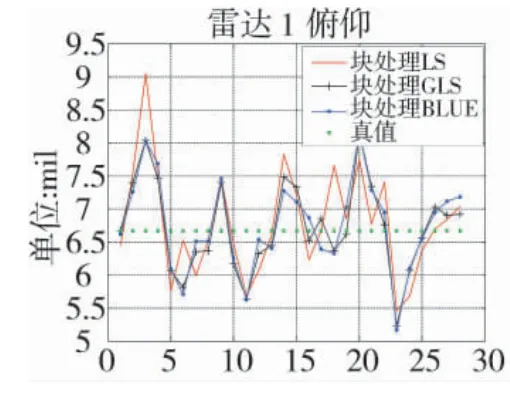
圖7 雷達1 俯仰誤差估計
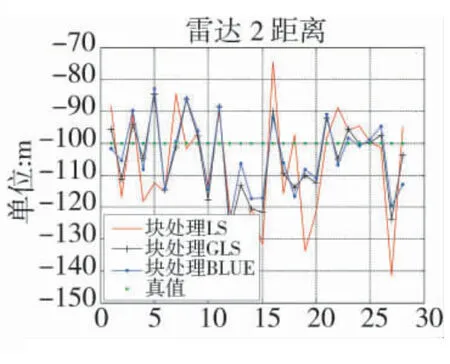
圖8 雷達2 距離誤差估計

圖9 雷達2 方位誤差估計
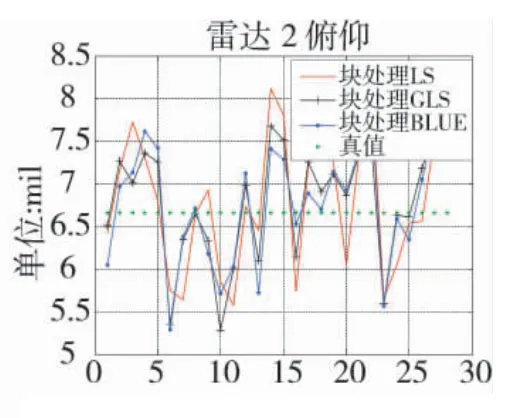
圖10 雷達2 俯仰誤差估計
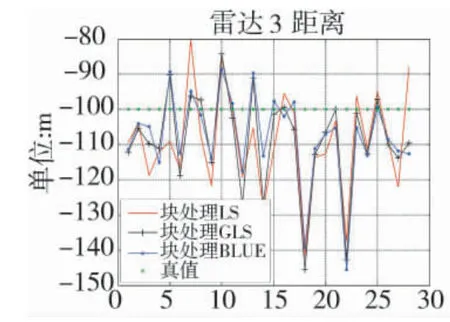
圖11 雷達3 距離誤差估計
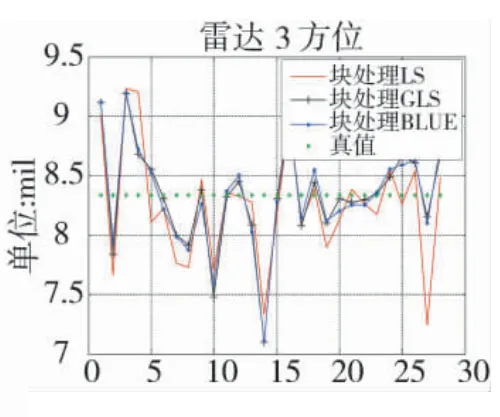
圖12 雷達3 方位誤差估計
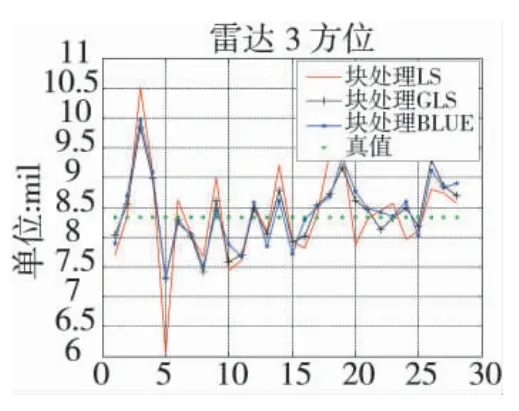
圖13 雷達3 俯仰誤差估計

表1 各方法估計誤差的均值和方差(雷達1)

表2 各方法估計誤差的均值和方差(雷達2)

表3 各方法估計誤差的均值和方差(雷達3)
3 BLUE 方法在相對空間配準中的應用
在使用1.2 節中相對空間配準問題的量測組織結構的基礎上,模擬第2 節中的仿真場景,令雷達3為主站,雷達1 和雷達2 為從站,使用基于ECEF 坐標轉換的BLUE 方法估計雷達1、雷達2 的相對系統誤差。
從下頁圖14~圖19 中算法估計結果與真值的比較中可以看出,該方法能較好地估計雷達1、雷達2 的相對系統誤差,從而證明BLUE 方法不僅能夠解決多傳感器多目標情況下的絕對配準問題,還能夠應用到相對空間配準問題中。
4 結論
空間配準技術是多雷達組網首先考慮解決的關鍵問題之一,如果配準問題解決不好,則后續的估計、跟蹤、識別的精度就會降低。本文對多傳感器多目標背景下基于BLUE 方法的空間配準算法進行了研究,在文獻[1]中BLUE 方法的基礎上,將其推廣到基于ECEF 坐標轉換的BLUE 方法,并與LS、GLS 方法進行了仿真比較,結果顯示出了BLUE 方法的優勢。通過修改量測組織結構將基于ECEF 坐標轉換的BLUE 方法應用到了相對空間配準問題中,仿真結果驗證了算法的正確性。
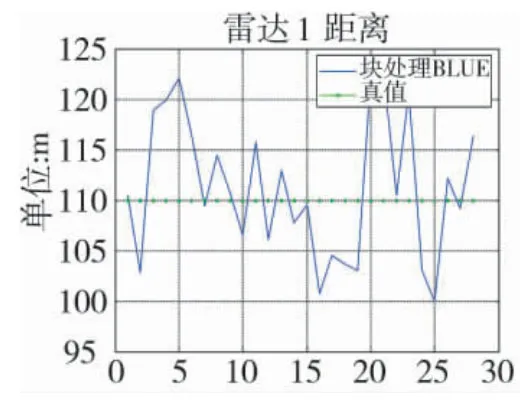
圖14 雷達1 距離誤差估計
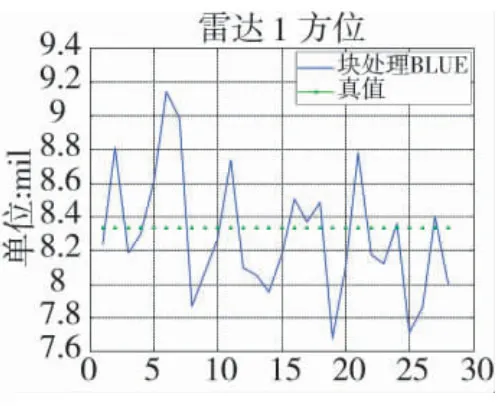
圖15 雷達1 方位誤差估計

圖16 雷達1 俯仰誤差估計
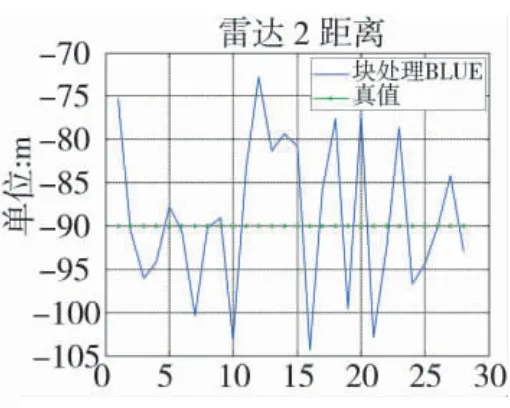
圖17 雷達2 距離誤差估計
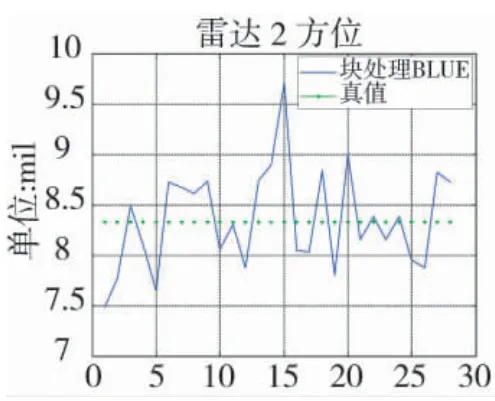
圖18 雷達2 方位誤差估計
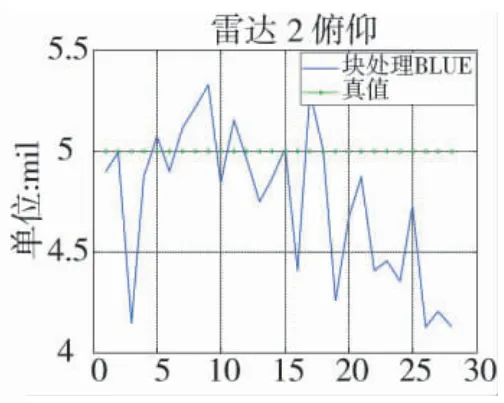
圖19 雷達3 俯仰誤差估計
猜你喜歡
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
現代出版(2020年3期)2020-06-20 07:10:34
兒童故事畫報(2019年5期)2019-05-26 14:26:14
意林原創版(2016年10期)2016-11-25 10:28:30
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34