數字基帶傳輸系統誤碼率的仿真研究
2019-11-08 02:04:10李棟
數字通信世界 2019年10期
關鍵詞:系統
李 棟
(新鄉學院物理與電子工程學院,新鄉 453003)
數字基帶傳輸系統是一類直接傳輸基帶信號,不含調制解調器的數字通信系統。該系統不僅在近程數據通信中有著廣泛應用,而且涵蓋了數字帶通傳輸系統中的諸多基本問題,如本文所要研究的碼間串擾和信道噪聲,同時線性調制的帶通傳輸系統,可等效成基帶傳輸系統來研究,因此其重要性不言而喻。
可靠性是通信系統主要性能指標之一,而數字通信系統的可靠性通常用誤碼率表示。本文圍繞影響數字基帶傳輸系統誤碼率的主要因素展開討論,并在MATLAB中進行仿真研究。
1 數字基帶傳輸系統誤碼率的影響因素
碼間串擾是造成數字通信系統誤碼的重要原因之一。碼間串擾又稱碼間干擾,是由于通信系統中包括發送濾波器、接收濾波器和信道在內的總傳輸特性不理想,致使碼元波形產生畸變和展寬,在對當前碼元進行抽樣時,抽樣時刻上混入了其他碼元的相關信息,從而對當前碼元的判決產生一定的干擾作用。通常選用具有余弦滾降特性的傳輸系統來減小碼間串擾引起的誤碼率。
信道噪聲也是造成數字通信系統產生誤碼的重要原因之一。信道噪聲可以影響信號在抽樣時刻的抽樣值大小,從而影響判決過程,造成誤判,產生誤碼。由于信道噪聲無法消除,可以通過人為設定最佳判決門限,選用雙極性基帶系統等方式,來減小因信道噪聲引起的誤碼率。
信道噪聲除了可以直接影響信號的抽樣判決產生誤碼之外,還可以通過影響同步器提取位定時脈沖產生相位誤差來間接造成判決器的誤判。相位誤差主要是由位同步脈沖相位不斷跳變的調整所引起,根據位同步相關內容可知,對于數字鎖相環法提取位同步信號,相位誤差主要由以下幾個因素引起:收發時鐘頻率穩定度、環路輸入信號電平變化頻率、信道噪聲等。它會改變原有無碼間串擾的最佳抽樣時刻,從而使抽樣結果混入碼間串擾,當碼間串擾超過判決門限時,就會導致誤碼的產生。
為簡化問題分析,下面只考慮由信道噪聲引起的位定時脈沖產生相位誤差,其他因素假定均處于理想狀態,不會引起相位誤差。由于信道噪聲通過直接和間接兩個方面影響最終的誤碼率,理論分析過程極為繁瑣,所以為了更直觀的展現其中的過程以及最終的結果,下面將對基帶系統誤碼率部分相關因素進行仿真研究。
2 基帶系統誤碼率相關因素的MATLAB仿真
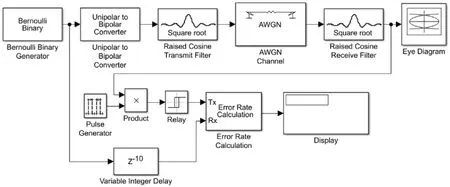
圖1 基帶系統仿真模型
MATLAB是一款主要用于矩陣計算、數據可視化、數值分析和數值計算的數學軟件,其中的Simulink是最重要的組件之一,它提供了一個用于動態系統建模、仿真和綜合分析的集成環境,尤其擅長信號處理與通信領域的建模和仿真。基于以上特點,本仿真研究將在MATLAB/Simulink中進行。
根據上面的分析,為了對比信道噪聲對誤碼率的直接和間接影響,仿真將分兩部分進行。首先仿真信道噪聲對誤碼率的直接影響,即假設此時同步器提取的位定時脈沖無相位誤差。根據數字基帶傳輸系統結構框圖,在MATLAB/Simulink中建立系統模型,如圖1所示。在該模型中,數字信源用伯努利二進制產生器,用來產生伯努利分布的隨機二進制數字序列,該數字序列為單極性波形,由于雙極性基帶系統抗噪聲性能更好,因此通過極性轉換器將數字信源輸出的單極性信號轉換成雙極性信號。隨后通過傳輸特性為平方根升余弦濾波器的發送設備、含有高斯白噪聲的信道以及傳輸特性為平方根升余弦濾波器的接收設備,實現理論上的無碼間串擾。由于此時不考慮信道噪聲對位定時脈沖相位誤差的影響,系統結構框圖中同步提取模塊直接用脈沖產生器代替,用來產生無相位誤差的位定時脈沖。經過抽樣判決之后,即可恢復原始的單極性數字序列,此數字序列和信源輸出信號在誤碼率計算模塊中進行比較,并將最終的誤碼率結果顯示在顯示器中。
其中各模塊主要參數設置如下:伯努利二進制產生器輸出“0”碼概率為0.5,即為等概輸出,采樣時間為0.001s;升余弦發送濾波器和接收濾波器的濾波器形狀為平方根,滾降系數α和高斯白噪聲信道的信噪比S/N為仿真中的可變參數;脈沖產生器脈沖周期為10個采樣點,脈沖寬度為5個采樣點,采樣時間為0.0001s;判決器判決門限為0,大于0輸出“1”,小于0輸出“0”;另外,經過仿真對比,得知抽樣判決之后的恢復信號波形在時間上比信源輸出的信號波形滯后10個碼元,因此為了得到正確的誤碼率,需要將信源輸出信號通過可變延時模塊后,同判決輸出信號一同送入誤碼率計算模塊中,并將延時長度設為10。
下面仿真當發送和接收濾波器滾降系數α分別為0、0.5、0.75、1,信道信噪比S/N分別為2、5、10dB時系統傳輸信號的誤碼率Pe,結果保留小數點后四位,如表1所示。
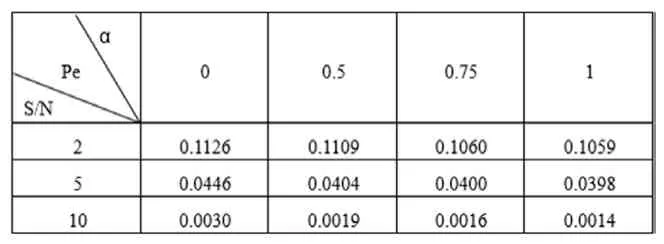
表1 無位定時相位誤差時誤碼率關系
分析表1,可以得出如下結論:對于特定的滾降系數α,信噪比S/N越大,誤碼率Pe越低;對于特定的信噪比S/N,滾降系數α越大,誤碼率Pe越低。該結論與理論分析結果相一致。因此,為了有效降低誤碼率,可以通過提高信噪比和增大滾降系數的方法來實現。當然,滾降系數越大,系統所占據的頻帶越寬,頻帶利用率減少;另外,信噪比也不可能無限制增加。實際中要結合具體應用場合折中選擇。
在上述仿真的基礎上,增加考慮信道噪聲對同步器提取的位定時信號存在相位誤差的情況,此時,圖1中的脈沖產生器應由實際中的同步提取模塊代替,其作用為從接收濾波器的輸出信號中提取位定時脈沖,用于后續的抽樣判決。該模塊在仿真中采用數字鎖相環來鎖定定時脈沖的二次諧波,繼而二分頻得出定時脈沖,實現位同步信號的提取過程。其中與圖1中相同模塊的參數設置完全相同,可變參數仍為兩個,即滾降系數α和高斯白噪聲信道的信噪比S/N。
下面仿真當發送和接收濾波器滾降系數α分別為0、0.5、0.75、1,信道信噪比S/N分別為5、10、15dB時系統傳輸信號的誤碼率Pe,結果保留小數點后四位,如表2所示。
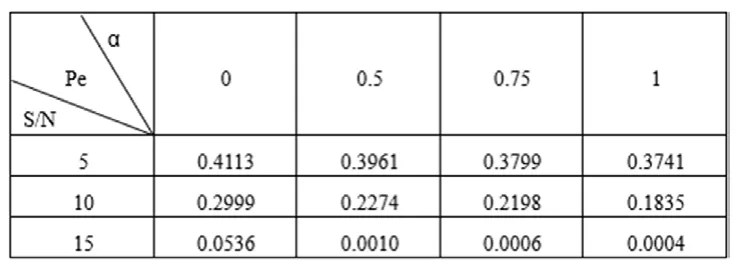
表2 有位定時相位誤差時誤碼率關系
分析表2,可以得出和表1類似的結論,此外,對比表1和表2中信噪比S/N為5dB的誤碼率Pe,可以看出,對于同樣的滾降系數α,由信道噪聲引起的位定時脈沖相位誤差會加劇誤碼的產生,從而導致誤碼率升高。該結論與理論分析結果相一致。
上述仿真中還可以在升余弦接收濾波器輸出端加入眼圖測量模塊,如圖1所示,用于輔助觀察碼間串擾和信道噪聲的情況。在上述兩種情況的仿真過程中,可以觀察到,對于特定的滾降系數α,信噪比S/N越大,眼圖“眼睛”張開的越大,線跡越清晰,對于特定的信噪比S/N,滾降系數α越大,眼圖“眼睛”同樣張開的越大,線跡越清晰。以上兩種情況均說明,隨著滾降系數α和信噪比S/N的增大,碼間串擾減小,信道噪聲相對減弱,最終影響誤碼率使其降低。
3 結束語
碼間串擾和信道噪聲是數字通信系統產生誤碼的主要原因,其中信道噪聲不僅可以直接干擾信號產生誤碼,還可以通過影響位同步提取模塊,使位定時脈沖產生相位誤差,從而在抽樣時刻引入碼間串擾,進而引起錯誤判決導致誤碼的產生。本文搭建了數字基帶傳輸系統模型,仿真信道噪聲對誤碼率的直接和間接影響,通過仿真結果可知,在信道噪聲的直接影響下,信噪比S/N越大,滾降系數α越大,誤碼率越低,而信道噪聲的間接影響作用使得誤碼率在原有基礎上進一步升高。以上結論可以為我們在實際應用中如何降低誤碼率,提升通信系統的可靠性,提供了有利的理論依據。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
