導(dǎo)航接收機(jī)自動(dòng)測(cè)試控制與評(píng)估技術(shù)分析
2019-11-08 02:03:58陳寶林孫永明次曉峰
數(shù)字通信世界 2019年10期
關(guān)鍵詞:用戶
陳寶林,孫永明,次曉峰
(1.中華通信系統(tǒng)有限責(zé)任公司河北分公司,石家莊 050200;2.河北省中小企業(yè)發(fā)展促進(jìn)中心,石家莊 050071)
隨著我國(guó)北斗導(dǎo)航系統(tǒng)的建設(shè),目前國(guó)內(nèi)導(dǎo)航接收機(jī)種類繁多,不同型號(hào)接收機(jī)的技術(shù)水平參差不齊[1]。通過測(cè)試證明,導(dǎo)航接收機(jī)(即用戶機(jī))在功能、性能以及可靠性等情況下,顯示出測(cè)試不完整、評(píng)估有偏差等方面的問題,所以用戶機(jī)的性能測(cè)試越來越多的受到了高度重視。其中以美國(guó)的GPS接收機(jī)測(cè)試系統(tǒng)最具代表性[2],該系統(tǒng)在室內(nèi)能夠模擬接收機(jī)在各種環(huán)境條件下接收的導(dǎo)航信號(hào),實(shí)現(xiàn)對(duì)導(dǎo)航接收機(jī)的全面高精度測(cè)試評(píng)估。因此,需要建立一套較高自動(dòng)化測(cè)試水平、具備評(píng)估的接收機(jī)測(cè)試評(píng)估系統(tǒng),在接收機(jī)應(yīng)用之前對(duì)其進(jìn)行全面、準(zhǔn)確、標(biāo)準(zhǔn)的測(cè)試與評(píng)估,以確保其性能指標(biāo)與相應(yīng)的技術(shù)要求相符合,保障接收機(jī)可以正常的運(yùn)行。導(dǎo)航接收機(jī)自動(dòng)化測(cè)試控制與實(shí)時(shí)評(píng)估技術(shù)為解決這一問題提供了一些新的思路和方法。
1 總體設(shè)計(jì)方案
試驗(yàn)控制與評(píng)估軟件是整個(gè)測(cè)試系統(tǒng)的控制中心[3],對(duì)數(shù)據(jù)仿真軟件、導(dǎo)航信號(hào)模擬器(內(nèi)含數(shù)據(jù)仿真軟件)、測(cè)試轉(zhuǎn)臺(tái)、通用測(cè)試設(shè)備等各個(gè)分系統(tǒng)進(jìn)行控制,自動(dòng)完成了對(duì)上述設(shè)備的統(tǒng)一、協(xié)同管理,以確保各個(gè)組成部分間同步、協(xié)調(diào)的運(yùn)行,完成對(duì)接收機(jī)的功能、性能等指標(biāo)的自動(dòng)測(cè)試控制與實(shí)時(shí)評(píng)估分析。
1.1 硬件的組成和工作的原理
用戶機(jī)測(cè)試系統(tǒng)的組成如圖1所示。

圖1 用戶機(jī)測(cè)試系統(tǒng)組成
試驗(yàn)控制與評(píng)估軟件就像用戶機(jī)測(cè)試系統(tǒng)的“大腦”,是用戶機(jī)與使用者之間的交互接口,應(yīng)用層方面,由大量的數(shù)據(jù)庫(kù)以及人機(jī)交互界面組成。自動(dòng)測(cè)試控制方面,完成了系統(tǒng)自動(dòng)檢測(cè)控制、數(shù)據(jù)仿真控制、射頻信號(hào)仿真控制、轉(zhuǎn)臺(tái)控制、儀器設(shè)備控制、用戶機(jī)測(cè)試模式選擇等方面控制。實(shí)時(shí)評(píng)估分析方面,包括誤碼率評(píng)估、測(cè)距精度評(píng)估等功能。
數(shù)據(jù)仿真軟件能夠仿真導(dǎo)航接收機(jī)在多種運(yùn)動(dòng)狀態(tài)和條件下,接收到不同星座、許多頻點(diǎn)的多種觀測(cè)數(shù)據(jù)[4],其中包含著星座的仿真、動(dòng)態(tài)軌跡的仿真和觀測(cè)數(shù)據(jù)的仿真等,為導(dǎo)航信號(hào)模擬器提供數(shù)據(jù)源,為自動(dòng)測(cè)試控制與實(shí)時(shí)評(píng)估提供了評(píng)估的標(biāo)準(zhǔn)。
導(dǎo)航信號(hào)模擬器能夠把數(shù)據(jù)仿真出來的觀測(cè)數(shù)據(jù),形成射頻信號(hào)(模擬)[5]。射頻信號(hào)能夠仿真衛(wèi)星產(chǎn)生的信號(hào),思量多普勒效應(yīng)的時(shí)候,應(yīng)始終保持載波相位和偽碼相位的相關(guān)性。
接口適配單元完成對(duì)導(dǎo)航輸出信號(hào)的耦合監(jiān)測(cè)信號(hào)輸出,同時(shí)對(duì)一路主用信號(hào)經(jīng)過射頻開關(guān)切換后,分別送微波暗室內(nèi)天線部分。
2 導(dǎo)航接收機(jī)自動(dòng)測(cè)試控制和實(shí)時(shí)評(píng)估的工作原理
自動(dòng)測(cè)試控制與實(shí)時(shí)評(píng)估軟件的自動(dòng)化測(cè)控制功能主要運(yùn)用在用戶機(jī)測(cè)試任務(wù)的自動(dòng)化運(yùn)行方面。用戶根據(jù)相應(yīng)的試驗(yàn)?zāi)0澹瓿蓽y(cè)試前的配置工作后,測(cè)試控制與評(píng)估軟件即按照模板中規(guī)定的試驗(yàn)項(xiàng)目及測(cè)試參數(shù)自動(dòng)完成所有項(xiàng)目的測(cè)試和分析評(píng)估以及報(bào)表生成。測(cè)試過程信息分類以日志文件形式進(jìn)行保存,試驗(yàn)測(cè)試數(shù)據(jù)存儲(chǔ)入數(shù)據(jù)庫(kù)。自動(dòng)化測(cè)試控制功能序列圖如圖2所示。
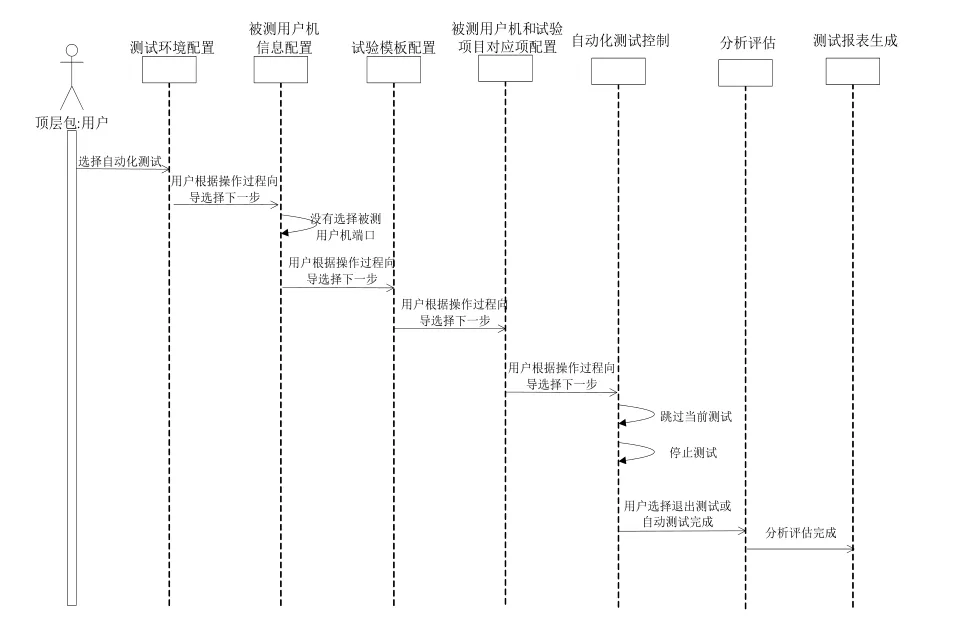
圖2 自動(dòng)化測(cè)試控制功能序列圖
自動(dòng)化測(cè)試控制方面關(guān)鍵要實(shí)現(xiàn),在系統(tǒng)自動(dòng)運(yùn)行的同時(shí),還要保證系統(tǒng)可靠和穩(wěn)定的運(yùn)行,設(shè)計(jì)該系統(tǒng)時(shí),考慮了異常捕獲機(jī)制,對(duì)可能出現(xiàn)的問題作出了相應(yīng)的處理,防止系統(tǒng)在自動(dòng)運(yùn)行中出現(xiàn)錯(cuò)誤。
該控制與評(píng)估軟件有實(shí)時(shí)評(píng)估的能力,能夠?qū)崟r(shí)對(duì)測(cè)試數(shù)據(jù)進(jìn)行解析、校對(duì),完成對(duì)RDSS、RNSS等測(cè)試項(xiàng)目進(jìn)行評(píng)估,評(píng)估完成后自動(dòng)生成測(cè)試報(bào)告。該軟件能夠根據(jù)被測(cè)用戶機(jī)的測(cè)試結(jié)果,與數(shù)據(jù)仿真軟件中相同仿真時(shí)間下的仿真數(shù)據(jù)進(jìn)行比對(duì),用特定的數(shù)學(xué)處理算法,將測(cè)試結(jié)果與仿真數(shù)據(jù)做比對(duì)和計(jì)算,實(shí)時(shí)作出評(píng)估結(jié)論。每個(gè)項(xiàng)目測(cè)試完成自動(dòng)給出處理報(bào)告。
3 導(dǎo)航接收機(jī)自動(dòng)測(cè)試控制設(shè)計(jì)
試驗(yàn)控制與評(píng)估軟件結(jié)合自動(dòng)化運(yùn)行控制、腳本化編輯、異常處理機(jī)制等技術(shù)實(shí)現(xiàn)了測(cè)試控制的自動(dòng)化。
用戶選擇測(cè)試任務(wù)的自動(dòng)化測(cè)試開始后,試驗(yàn)控制與評(píng)估軟件讀取試驗(yàn)項(xiàng)目模板獲取相應(yīng)的試驗(yàn)項(xiàng)目信息。根據(jù)試驗(yàn)項(xiàng)目列表順序進(jìn)行每一個(gè)單項(xiàng)試驗(yàn)項(xiàng)目的自動(dòng)化運(yùn)行。單項(xiàng)試驗(yàn)項(xiàng)目在自動(dòng)化運(yùn)行過程中如果遇到異常,則提示相應(yīng)的錯(cuò)誤信息并退出當(dāng)前試驗(yàn)項(xiàng)目進(jìn)入下一個(gè)試驗(yàn)項(xiàng)目的自動(dòng)化運(yùn)行。每一個(gè)單項(xiàng)試驗(yàn)項(xiàng)目自動(dòng)化運(yùn)行結(jié)束后自動(dòng)測(cè)試控制函數(shù)檢查試驗(yàn)項(xiàng)目列表指針是否為列表尾,如果不為試驗(yàn)項(xiàng)目列表尾則讀取下一個(gè)試驗(yàn)項(xiàng)目ID開始下一項(xiàng)目的單項(xiàng)試驗(yàn)項(xiàng)目的自動(dòng)化運(yùn)行,如果試驗(yàn)項(xiàng)目列表指針指向列表尾則表示所有測(cè)試已經(jīng)結(jié)束,測(cè)試自動(dòng)化已運(yùn)行完成,等待用戶的下一步操作[6]。測(cè)試控制自動(dòng)化運(yùn)行流程如圖3所示。

圖3 測(cè)試控制自動(dòng)化運(yùn)行流程圖
腳本化的測(cè)試項(xiàng)目模板是實(shí)現(xiàn)軟件自動(dòng)化運(yùn)行的關(guān)鍵之一[7]。軟件自動(dòng)化測(cè)試就是自動(dòng)執(zhí)行試驗(yàn)?zāi)_本的步驟及內(nèi)容的過程,在整個(gè)自動(dòng)化測(cè)試的實(shí)現(xiàn)流程中,選擇一種靈活可靠的試驗(yàn)?zāi)_本來進(jìn)行自動(dòng)化測(cè)試就成了其重要內(nèi)容。測(cè)試項(xiàng)目模板使用腳本化的xml文件將試驗(yàn)項(xiàng)目的步驟和測(cè)試參數(shù)保存下來。它是軟件實(shí)現(xiàn)自動(dòng)化運(yùn)行的基礎(chǔ)。
試驗(yàn)控制與評(píng)估軟件具備各分部分及設(shè)備的實(shí)時(shí)控制功能。在開放式試驗(yàn)環(huán)境中,試驗(yàn)控制與評(píng)估軟件可以對(duì)每個(gè)部分及設(shè)備進(jìn)行參數(shù)設(shè)置。實(shí)現(xiàn)獨(dú)立控制每個(gè)分系統(tǒng)及設(shè)備的功能,并實(shí)時(shí)獲得各分系統(tǒng)和設(shè)備的相應(yīng)狀態(tài)信息。系統(tǒng)實(shí)時(shí)控制的主要設(shè)備為:仿真信號(hào)源、被測(cè)導(dǎo)航接收機(jī)、轉(zhuǎn)臺(tái)等。
4 導(dǎo)航接收機(jī)評(píng)估方法分析
試驗(yàn)控制與評(píng)估軟件根據(jù)用戶機(jī)的功能和性能指標(biāo),深刻理解各個(gè)指標(biāo)的涵義,依據(jù)每個(gè)指標(biāo)的特點(diǎn),選擇科學(xué)、合理、準(zhǔn)確的算法,保證評(píng)估算法的準(zhǔn)確性[8]。
4.1 誤碼率和靈敏度的評(píng)估方法
誤碼率和靈敏度測(cè)試的核心問題是測(cè)試接收機(jī)在不同信號(hào)電平下導(dǎo)航電文接收誤碼率的問題[9],因此,對(duì)于此項(xiàng)測(cè)試,軟件解決的重點(diǎn)即是導(dǎo)航電文的解調(diào)和比對(duì)。測(cè)試開始后,測(cè)試控制模塊接收用戶機(jī)和數(shù)據(jù)仿真軟件上報(bào)的電文信息,在處理數(shù)據(jù)的時(shí)候,先將導(dǎo)航電文傳遞給分析評(píng)估模塊(接收機(jī)和數(shù)仿分系統(tǒng)上報(bào)的電文),接下來開始處理接收機(jī)上報(bào)的導(dǎo)航電文,然后對(duì)該幀電文里面的周內(nèi)秒計(jì)數(shù)以及子幀編號(hào)進(jìn)行解調(diào)處理,此時(shí),也解調(diào)數(shù)據(jù)仿真軟件形成的導(dǎo)航電文,找到與用戶機(jī)上報(bào)電文相同的子幀,進(jìn)行導(dǎo)航電文比對(duì),按位處理,計(jì)算用戶電文的誤碼率,最后把計(jì)算結(jié)果存儲(chǔ)到數(shù)據(jù)庫(kù)中,并按報(bào)表格式生成誤碼率測(cè)試報(bào)表,誤碼率和靈敏度的評(píng)估過程圖如圖4所示

圖4 誤碼率和靈敏度實(shí)時(shí)評(píng)估過程圖
4.2 測(cè)距精度的評(píng)估算法
測(cè)試啟動(dòng)后,測(cè)試控制模塊接收數(shù)仿軟件和接收機(jī)上報(bào)數(shù)據(jù)信息,該數(shù)據(jù)信息包含通道號(hào)、歷元的偽距測(cè)量值、衛(wèi)星號(hào)、接收機(jī)鐘差等,分析評(píng)估模塊在系統(tǒng)調(diào)度下啟動(dòng),處理使用通道歷元的偽距測(cè)量值,根據(jù)接收機(jī)報(bào)上來的接收機(jī)鐘差以及歷元信息,運(yùn)用內(nèi)插算法,計(jì)算出理論偽距值;并開始統(tǒng)計(jì)每個(gè)通道的偽距測(cè)量結(jié)果;然后計(jì)算各通道的偽距測(cè)量精度,最后完成評(píng)估結(jié)果的存儲(chǔ)和測(cè)試報(bào)表的生成,測(cè)距精度的評(píng)估過程圖如圖5所示。
各個(gè)通道上報(bào)的偽距測(cè)算精度計(jì)算方法:
設(shè)接收機(jī)上報(bào)的偽距值為xi,j,i是通道號(hào),j是采樣時(shí)刻。
通常是第一個(gè)通道的偽距值作為基準(zhǔn),在采樣時(shí)刻相同時(shí),其余各個(gè)通道的觀測(cè)值與基準(zhǔn)通道里的偽距值分別做差,計(jì)算出來的結(jié)果,再減去通道間偽距差值。


式中,n為i通道和一通道偽距采樣時(shí)刻相同的數(shù)量。
4.3 其他的實(shí)時(shí)評(píng)估方法
輸出秒信號(hào)精度、雙向零值、BPSK相位調(diào)制偏差和載波抑制、和單向設(shè)備時(shí)延的實(shí)時(shí)評(píng)估采用對(duì)樣本值取均值,并把均值和指標(biāo)要求進(jìn)行比較的評(píng)估方法。
帶外輻射功率、首次捕獲時(shí)間和失鎖重捕時(shí)間的實(shí)時(shí)評(píng)估對(duì)測(cè)試數(shù)據(jù)取最大值,并把最大值和指標(biāo)要求進(jìn)行比較。
5 結(jié)束語
導(dǎo)航接收機(jī)自動(dòng)測(cè)試控制和評(píng)估技術(shù)的分析,依據(jù)測(cè)試項(xiàng)目不同,完成了接收機(jī)各項(xiàng)功能、性能的測(cè)試,并可以評(píng)估接收機(jī)各項(xiàng)指標(biāo)是否合格,并自動(dòng)生成測(cè)試報(bào)告。通過該研究,能夠推動(dòng)實(shí)現(xiàn)導(dǎo)航接收機(jī)測(cè)試更加標(biāo)準(zhǔn)和規(guī)范,為以后研制導(dǎo)航接收機(jī)以及生產(chǎn)導(dǎo)航接收機(jī)等提供有力保障,促進(jìn)提升我國(guó)接收機(jī)技術(shù)水平及質(zhì)量,從而有效確保裝備的戰(zhàn)斗力[10]。
猜你喜歡
車主之友(2022年4期)2022-08-27 00:58:26
知音·下半月(2022年5期)2022-05-23 23:17:04
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年5期)2016-11-28 09:55:15
非公有制企業(yè)黨建(2016年1期)2016-07-19 13:02:51
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
衛(wèi)星與網(wǎng)絡(luò)(2016年12期)2016-02-05 09:23:23
創(chuàng)業(yè)家(2015年10期)2015-02-27 07:55:08
創(chuàng)業(yè)家(2015年10期)2015-02-27 07:54:39
