基于Petri網(wǎng)的電磁循跡小車控制程序建模
2019-11-06 06:24:49鄧雪峰董文嫘馮靈清柏元利
物聯(lián)網(wǎng)技術(shù) 2019年9期
關(guān)鍵詞:物聯(lián)網(wǎng)技術(shù)
鄧雪峰 董文嫘 馮靈清 柏元利
摘 要:電磁循跡小車是物聯(lián)網(wǎng)技術(shù)發(fā)展到一定階段的產(chǎn)物。電磁循跡小車的控制程序設(shè)計是電磁循跡小車正確行駛的關(guān)鍵因素,為了保證控制程序的正確性,采用了Petri網(wǎng)對電磁循跡小車的控制程序進行建模,并利用可達圖對模型進行了特性分析。結(jié)果表明,利用Petri網(wǎng)對控制程序進行建模可以保證控制程序的控制邏輯設(shè)計正確,提升電磁循跡小車設(shè)計的可靠性。
關(guān)鍵詞:電磁循跡小車;程序設(shè)計;Petri網(wǎng);程序建模;物聯(lián)網(wǎng)技術(shù);電磁感應(yīng)技術(shù)
中圖分類號:TP311.1文獻標(biāo)識碼:A文章編號:2095-1302(2019)09-00-02
0 引 言
隨著物聯(lián)網(wǎng)技術(shù)與工業(yè)、物流等領(lǐng)域的深度融合,智能的小車可以實現(xiàn)自動地按照指定的路線行進,這給生產(chǎn)過程和日常生活都帶來了極大的便利[1-3]。因此智能循跡小車的研究一直以來也是物聯(lián)網(wǎng)領(lǐng)域的一個研究熱點問題。當(dāng)前的技術(shù)背景下,采用電磁感應(yīng)為主要感應(yīng)技術(shù)的循跡小車在許多應(yīng)用中由于感應(yīng)技術(shù)比較成熟,已經(jīng)被廣泛的采用[4-6]。
在智能小車的循跡設(shè)計中,一般采用高速的單片機作為小車的主要控制核心,此單片機完成小車的智能控制,包括循跡、速度控制等操作。由于核心控制部分同時完成多種功能的控制,其設(shè)計的正確性是智能小車設(shè)計成敗的關(guān)鍵因素。在小車的試驗過程中,經(jīng)常出現(xiàn)由于設(shè)計的缺陷引起的小車失控事件,一般都是由于在設(shè)計核心控制模塊時控制邏輯出現(xiàn)不合理設(shè)計而產(chǎn)生的。目前,Petri網(wǎng)作為一種建模工具已經(jīng)廣泛應(yīng)用于工業(yè)系統(tǒng)設(shè)計的建模[7-10]。本文針對小車控制模塊設(shè)計的問題,采用Petri網(wǎng)作為電磁小車控制部分模塊建模的工具,對小車的設(shè)計進行建模驗證,從而保證小車的控制邏輯的正確。
1 電磁循跡小車控制程序設(shè)計
1.1 電磁循跡小車的控制的基本原理
電磁循跡小車一般采用電磁感應(yīng)傳感器作為小車循跡的信號采集器,感應(yīng)部件采集到軌跡信息,然后經(jīng)過信號放大、轉(zhuǎn)換等過程,轉(zhuǎn)換為數(shù)字信號。數(shù)字信號輸入到核心控制模塊,一般由高速單片機等智能器件作為主控制程序的運行器件,核心控制模塊將對傳感器輸入的軌跡信息進行判斷,從而決定小車的驅(qū)動電路如何工作。本文采用兩個傳感器作為小車軌跡檢測傳感器,左、右兩個傳感器分別位于車頭的兩側(cè),可以檢測地面上的金屬絲制作的軌跡。當(dāng)傳感器檢測到金屬絲時,產(chǎn)生低電平,形成信號0;未檢測到金屬絲時,保持高電平,形成信號1。控制部分依據(jù)左右傳感器產(chǎn)生的數(shù)字信號,形成判斷邏輯,從而控制小車的方向。
1.2 電磁循跡小車的控制模塊設(shè)計
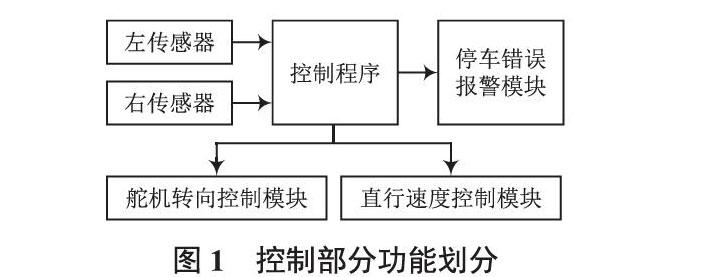
依據(jù)第1.1節(jié)所述的基本原理,電磁循跡小車的控制部分的主要功能如圖1所示。
(1)傳感器信號轉(zhuǎn)換模塊包括小車前端的左、右兩個傳感器的信號采集及轉(zhuǎn)換。
(2)控制程序主要完成信號的處理分析,并且實現(xiàn)對轉(zhuǎn)向、速度及停車的出錯控制。
(3)舵機轉(zhuǎn)向控制模塊實現(xiàn)對舵機的轉(zhuǎn)向控制,接收控制程序發(fā)來的轉(zhuǎn)向信號,對舵機進行相應(yīng)的控制。
(4)直行速度控制模塊依據(jù)控制程序發(fā)送的速度高速信號,驅(qū)動速度相關(guān)電機進行速度調(diào)整。
(5)停車錯誤報警模塊在小車行駛中,對意外出軌等情況進行停車報警,通知相關(guān)人員進行錯誤處理。
2 電磁循跡小車控制程序建模
2.2 控制程序建模
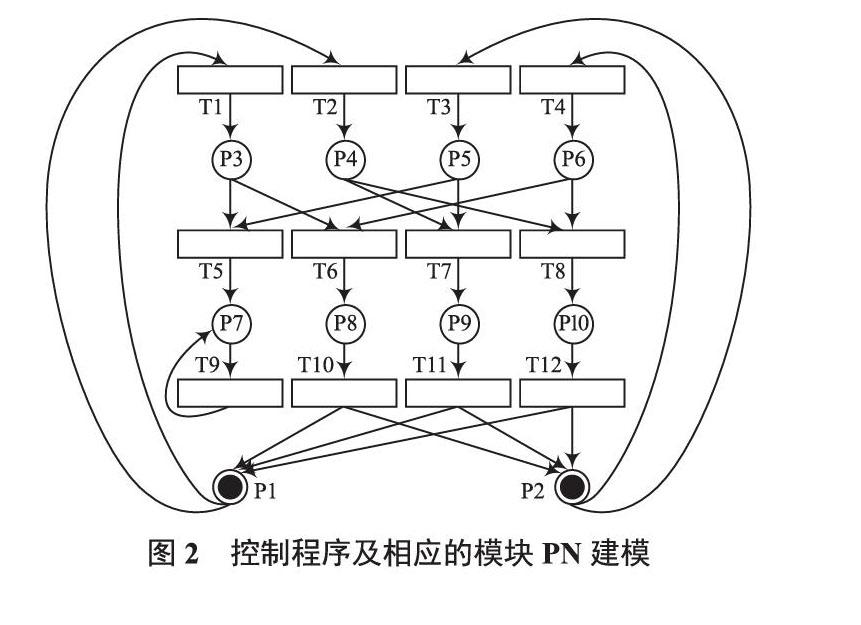
第1.2節(jié)中控制程序主要包含傳感器采集轉(zhuǎn)換模塊、數(shù)據(jù)分析處理模塊以及運行控制模塊。本文以小車正常進入軌道為初始條件。小車控制程序的PN模型的庫所及變遷設(shè)定如下:
P1:左傳感器采集信息;P2:右傳感器采集信息;P3:左傳感器接收左轉(zhuǎn)信息;P4:左傳感器未接收左轉(zhuǎn)信息;P5:右傳感器接收右轉(zhuǎn)信息;P6:右傳感器未接收右轉(zhuǎn)信息;P7:小車停止運行;P8:小車左轉(zhuǎn);P9:小車右轉(zhuǎn);P10:小車直行。
T1:發(fā)送左轉(zhuǎn)信息;T2:發(fā)送無需左轉(zhuǎn)信息;T3:發(fā)送右轉(zhuǎn)信息;T4:發(fā)送無需右轉(zhuǎn)信息;T5:發(fā)送運行狀態(tài)錯誤信息;T6:發(fā)送左轉(zhuǎn)信號;T7:發(fā)送右轉(zhuǎn)信號;T8:發(fā)送直行信號;T9:發(fā)送錯誤警告信號;T10:發(fā)送直行處理完畢信號;T11:發(fā)送右轉(zhuǎn)處理完畢信號;T12:發(fā)送左轉(zhuǎn)處理完畢信號。
控制程序及相應(yīng)的模塊PN建模如圖2所示。
3 控制程序Petri網(wǎng)模型特性驗證
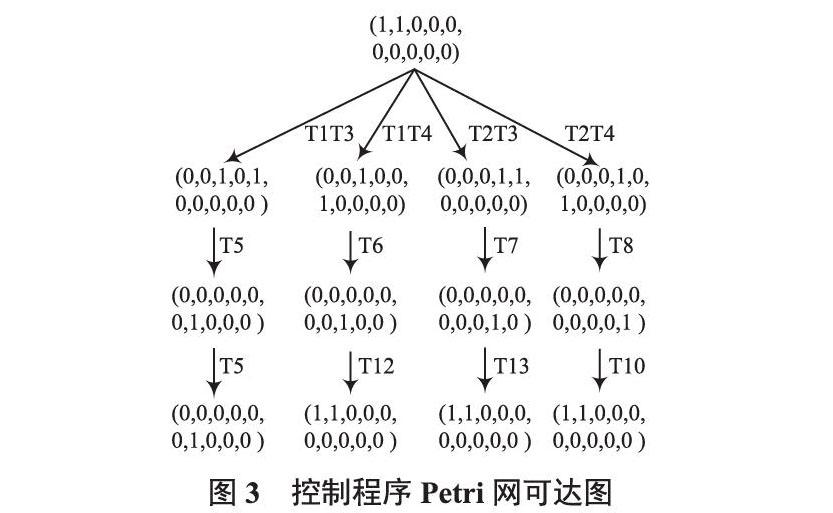
本文采用可達圖分析圖2的Petri網(wǎng)模型的相應(yīng)特性。在小車循跡過程中,主要控制邏輯由于設(shè)計問題可能出現(xiàn)死鎖、系統(tǒng)穩(wěn)定性差等問題,因此對模型設(shè)計的相應(yīng)特性的檢查可以避免在設(shè)計過程中發(fā)生相應(yīng)的錯誤設(shè)計。圖2的Petri網(wǎng)模型的可達圖如圖3所示。
依據(jù)可達圖,控制程序的基本性能分析如下:
(1)圖3中所有節(jié)點上的標(biāo)記均為0或1時,此時PN是有界,證明本模型是安全的,是可以實現(xiàn)的;
(2)圖3中所有節(jié)點都存在有向路徑,但不包含全部變遷,所以系統(tǒng)不是活的,系統(tǒng)中存在死鎖,如在小車進入出錯處理狀態(tài)時會停車等待處理;
(3)圖3中從任何節(jié)點到根節(jié)點都存在有向路徑,代表PN是可逆,反映系統(tǒng)具有可恢復(fù)性。
4 結(jié) 語
本文對電磁循跡小車的主要控制程序進行了設(shè)計描述,采用Petri網(wǎng)對控制程序進行了建模,并采用可達圖對模型進行了進一步的分析。結(jié)果表明,利用Petri網(wǎng)對電磁循跡小車的控制程序建模,可以消除程序的死鎖等特性,保證了程序設(shè)計的正確性。
參 考 文 獻
[1]高鳳強,董坤煌,周牡丹,等.基于電感數(shù)字變換傳感器的智能小車自動循跡系統(tǒng)[J].工程設(shè)計學(xué)報,2018,25(2):216-222.
[2]陳浩,田會峰,周瑜,等.一種自動化醫(yī)療垃圾收集系統(tǒng)設(shè)計[J].自動化技術(shù)與應(yīng)用,2017,36(11):89-92.
[3]范淇元,覃羨烘,黃文妹.基于模塊化控制的多功能智能搬運小車的設(shè)計[J].自動化與儀表,2018,33(11):47-51.
[4]杜青,喬延華,韓淼,等.基于金屬檢測的智能循跡小車設(shè)計[J].現(xiàn)代電子技術(shù),2018,41(17):119-122.
[5]黃健,董三鋒,王利平.基于LDC1000自動循跡智能小車設(shè)計[J].微特電機,2017,45(6):62-64.
[6]曹建平,雷丹,郭磊.基于LDC1000電感數(shù)字傳感器的自動循跡智能小車控制系統(tǒng)設(shè)計[J].自動化技術(shù)與應(yīng)用,2017,36(12):13-17.
[7]鄭金來,張猛,熊昌秀,等.基于Petri網(wǎng)模型的自動線流程設(shè)計與分析[J].組合機床與自動化加工技術(shù),2018(1):60-63.
[8]董健,戴勝華.基于CPN的列控系統(tǒng)等級轉(zhuǎn)換建模與分析[J].計算機工程與應(yīng)用,2018,54(2):208-213.
[9]梁昌勇,徐彬,俞家文,等.基于RFID的汽車總裝物料配送過程的Petri網(wǎng)建模與仿真[J].機械設(shè)計與制造,2009(9):203-205.
[10]都雪靜,王真真.基于Petri網(wǎng)的汽車總裝線生產(chǎn)物流優(yōu)化[J].物流技術(shù),2017,36(9):136-140.
猜你喜歡
電子技術(shù)與軟件工程(2016年20期)2016-12-21 09:37:17
電子技術(shù)與軟件工程(2016年19期)2016-12-19 17:21:51
電子技術(shù)與軟件工程(2016年19期)2016-12-19 17:16:19
電子技術(shù)與軟件工程(2016年19期)2016-12-19 17:15:35
電腦知識與技術(shù)(2016年27期)2016-12-15 18:27:52
中國市場(2016年32期)2016-12-06 11:53:37
商情(2016年40期)2016-11-28 11:05:43
中國市場(2016年41期)2016-11-28 05:39:01
商情(2016年39期)2016-11-21 08:47:03
中小企業(yè)管理與科技·下旬刊(2016年10期)2016-11-18 20:58:27
