宏微超聲電機驅(qū)動系統(tǒng)輔助電源研制*
2019-11-06 05:55:02龍濤元張鐵民董義奎
振動、測試與診斷 2019年5期
關(guān)鍵詞:變壓器
龍濤元, 張鐵民, 董義奎
(華南農(nóng)業(yè)大學(xué)工程學(xué)院 廣州,510642)
引 言
宏微超聲電機(macro-micro ultrasonic motor,簡稱MMUSM)是將大行程高速宏運動和微行程高精度微運動集于一體的新型超聲電機[1-2]。較目前國內(nèi)外采用傳統(tǒng)大行程高速伺服電機驅(qū)動與納米級的壓電陶瓷微驅(qū)動相結(jié)合的宏微驅(qū)動方式相比,具有系統(tǒng)架構(gòu)不復(fù)雜,可靠性好等優(yōu)點[1,3]。MMUSM驅(qū)動控制系統(tǒng)需5路+15 V給交直流輸出電路的功率開關(guān)驅(qū)動供電,+5 V為控制器和位移檢測傳感器等電路供電,±12 V為精密信號調(diào)理電路供電,且上述各電源相互獨立。為配合MMUSM驅(qū)動控制系統(tǒng)能夠?qū)崿F(xiàn)精密測量和脈沖式等各種控制算法,其輔助電源輸出電壓精度應(yīng)控制在±2%以內(nèi)。
超聲電機或MMUSM驅(qū)動控制系統(tǒng)所用輔助電源市面上無此類特殊電源,在USM和MMUSM相關(guān)文獻中很少提及到其多路獨立輸出輔助電源設(shè)計。文獻[1-5]提及的輔助電源是采用多個工頻變壓器降壓整流和線性穩(wěn)壓芯片實現(xiàn)多路獨立輸出,但線路結(jié)構(gòu)復(fù)雜、體積大、效率低。文獻[4-7]提及了幾種應(yīng)用場合的多路輸出電源:a.采用單級拓撲結(jié)構(gòu)和多繞組輸出高頻變壓器實現(xiàn),并通過用加權(quán)控制,變壓器優(yōu)化設(shè)計,磁放大器控制,增加次級側(cè)電感等方法來解決交叉調(diào)整率問題,但工程試驗結(jié)果說明上述方法存在設(shè)計難度較大或交叉調(diào)整率不理想問題;b.采用PWM開關(guān)調(diào)制方式降壓和線性穩(wěn)壓方式,但效率不理想,且較大功率時需散熱片增大了電源尺寸和重量。文獻[6-10]論述了多路輸出調(diào)節(jié)技術(shù)因不同實際應(yīng)用而不同,如加權(quán)控制不適合多路獨立輸出,磁放大器調(diào)節(jié)法不適合高頻場合。筆者結(jié)合MMUSM驅(qū)動系統(tǒng)實際需求,采用AC-DC變換器和開關(guān)型MP1584降壓穩(wěn)壓電路兩級拓撲實現(xiàn)高效率、高功率密度和高精度輸出電壓。考慮LLC諧振變換器更易實現(xiàn)高效率和輕量化,以及輸出端毛刺較小更適合多路輸出,AC-DC變換器使用半橋LLC諧振變換器。
1 原理與設(shè)計
1.1 MMUSM驅(qū)動系統(tǒng)輔助電源結(jié)構(gòu)
圖1為MMUSM驅(qū)動系統(tǒng)輔助電源結(jié)構(gòu)圖。輔助電源包含2級變換,半橋LLC諧振變換器配合高頻多路輸出變壓器T1實現(xiàn)大范圍降壓處理,其中主功率輸出電壓采用TL431和PC817構(gòu)成閉環(huán)控制保持高精度穩(wěn)壓輸出。其他輔助輸出均為開環(huán)輸出,但通過加開關(guān)型MP1584降壓穩(wěn)壓電路實現(xiàn)二次穩(wěn)壓得到高的穩(wěn)壓精度。
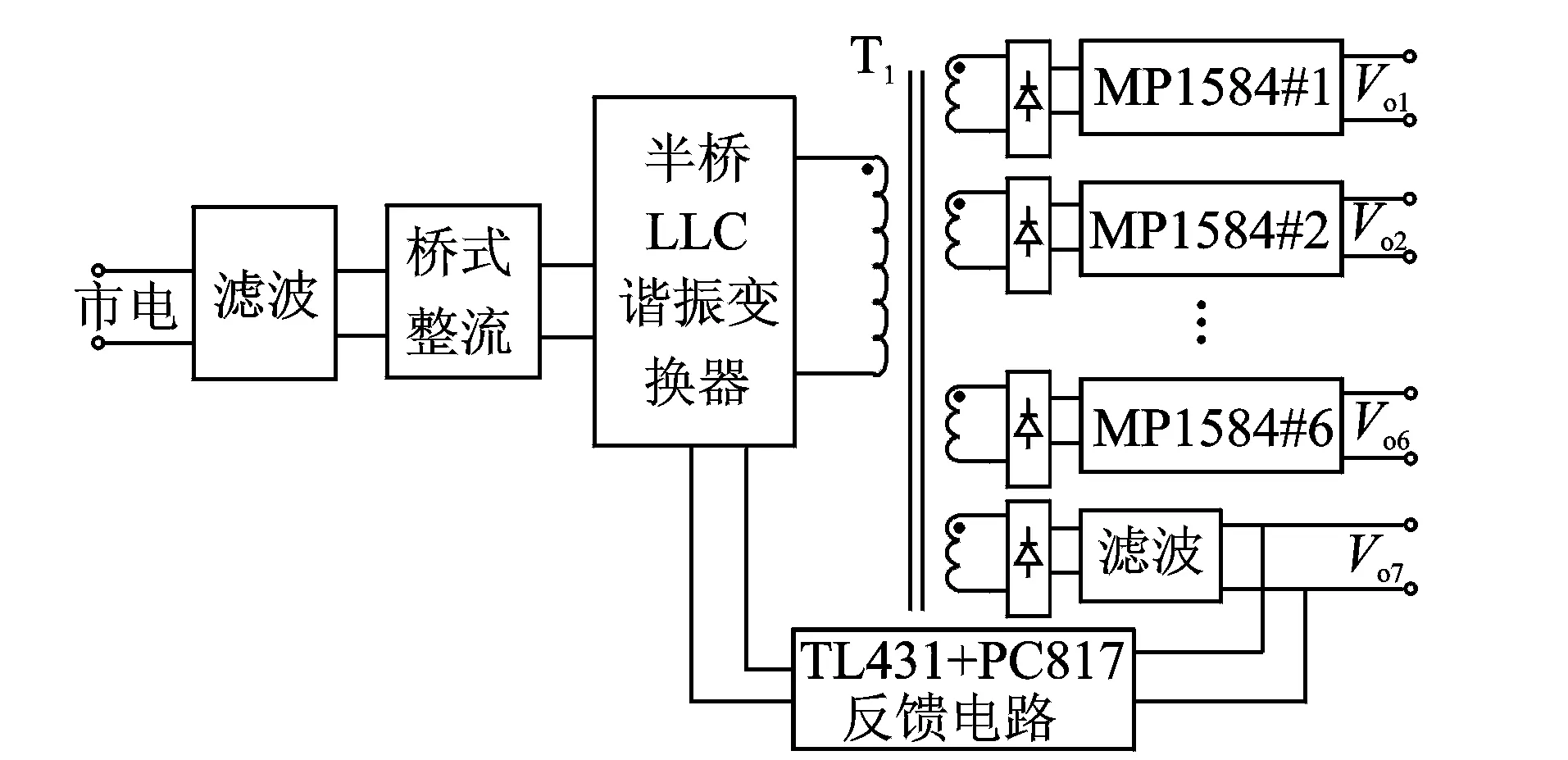
圖1 MMUSM驅(qū)動控制系統(tǒng)輔助電源結(jié)構(gòu)Fig.1 MMUSM drive control system auxiliary power block diagram
1.2 基于NCP1396半橋LLC諧振DC-DC
圖2為基于NCP1396控制器的多路獨立輸出半橋LLC諧振變換器主電路,圖中僅畫出了閉環(huán)控制的主功率輸出。NCP1369是高性能諧振模式控制器,具有峰值電流1 A的高低端MOSFET驅(qū)動電路,高精度可調(diào)的工作頻率和死區(qū)時間,以及過溫、過壓等保護功能,簡化了LLC半橋諧振變換器電路結(jié)構(gòu),提高了電路的可靠性。采用PC817線性光耦(U2)和TL431(U3)組成了主功率輸出隔離反饋網(wǎng)絡(luò),當輸出電壓偏離設(shè)定電壓時,PC817注入NCP1396第6腳電流發(fā)生變化,控制開關(guān)頻率;采用三極管Q3、穩(wěn)壓管D11和D12和TL431(U4)組成了短路保護網(wǎng)絡(luò),TL431(U4)接至NCP1396第9腳,在發(fā)生短路時,使得第9腳電壓大于2.5 V,此時OCP點電壓瞬間變?yōu)楦邏海P(guān)閉NCP1396。圖2中C9,D10,D7,R15和R13組成過流保護網(wǎng)絡(luò)接至NCP1396第9腳,當通過C9傳過來的電壓經(jīng)過R15和R13分壓,使得NCP1396低腳電壓超過0.85 V時,NCP1396關(guān)閉。LLC半橋諧振變換器工作原理可參閱文獻[6-8]。

圖2 基于NCP1396控制器LLC半橋諧振電路Fig.2 LLC half bridge circuit based on NCP1396
1.3 MP1584降壓穩(wěn)壓電路
圖3為基于MP1584的Buck電路,用于LLC諧振變換器非穩(wěn)定輸出的二次穩(wěn)壓。MP1584控制器集功率,控制和保護功能一體,省去反饋網(wǎng)路和保護網(wǎng)絡(luò)減小了電路尺寸;很寬的輸入電壓范圍降低了對LLC諧振變換器輸出要求;1.5 MHz的開關(guān)頻率能解決EMI噪聲問題;具有在輕載時按比例降低開關(guān)頻率減小開關(guān)管驅(qū)動電路損耗實現(xiàn)高效率轉(zhuǎn)換。
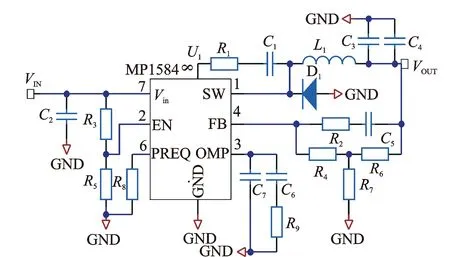
圖3 基于MP1584穩(wěn)壓電路Fig.3 Regulator circuit with MP1584
2 參數(shù)計算
2.1 變壓器及主電路參數(shù)設(shè)計
MMUSM驅(qū)動控制系統(tǒng)需要5路+15,+5,±12 V,為了降低變壓器繞組數(shù)過多繞制困難,將±12 V及其他等級電壓合為24 V主功率穩(wěn)定輸出,考慮MP1584 Buck電路輸入電壓至少要高于輸出電壓3 V,非穩(wěn)定輸出電壓均設(shè)為20 V。變換器參數(shù)如下:輸入電壓Vinmin=198 V,Vinmax=330 V;額定輸入電壓Vinnom=264 V;輸出+20 V/1 A(5路);+24 V/3 A。
為了最大限度地降低開關(guān)頻率變化,提高變換器效率,在額定工作輸入電壓下,變換器工作頻率設(shè)計為諧振頻率fs,電壓增益Anom=1。因此在最大輸入電壓和最小輸入電壓下的增益分別為
(1)
(2)
變壓器T1激磁電感為Lm,串聯(lián)諧振電感為Lr,變壓器初級的等效負載阻抗為Rac,則諧振電感系數(shù)k和品質(zhì)因素Q分別為
(3)
考慮+24 V在輸出功率中比重大,設(shè)計以+24 V作為主控輸出,其變壓器變比為
(4)
其中:V+24表示24 V,VD為整流二極管壓降0.7 V,則可得n=5.2。
變壓器T1初級的等效負載阻抗Rac為
(5)
代入相關(guān)參數(shù)得到Rac=73.5 Ω
根據(jù)k和Q與增益的關(guān)系曲線[11],以及k對轉(zhuǎn)換效率的影響,考慮10%的電壓增益余量,確定k=7,Q值為0.46時能確保在Vinmin下有足夠的峰值增益。確定諧振頻率fs=120 kHz,諧振網(wǎng)絡(luò)參數(shù)為
(6)
(7)
(8)
變壓器T1初級最小線圈數(shù)
(9)
允許的最小頻率fsmin
(10)
這里取fsmin=80 kHz,ΔB=0.25T,磁芯選擇EER35(Ae=107.00 mm2)可得Npmin=31匝。N+24=7匝,則Np=37>Npmin。其他非穩(wěn)定輸出繞組匝數(shù)按照式(4)和Np值計算得出,在此不作詳細計算。
2.2 控制器外圍電路關(guān)鍵參數(shù)設(shè)計
2.2.1 NCP1396外圍電路參數(shù)
NCP1396外圍電路需要確定最小工作頻率電阻RFmin,最大工作頻率電阻RFmax,死區(qū)時間電阻RDT,查閱NCP1396數(shù)據(jù)手冊,可得:RFmin=15 kΩ;RFmax=3.5 kΩ;RDT=12 kΩ。
PC817和TL431組成的反饋網(wǎng)絡(luò)影響到電源工作的穩(wěn)定性,反饋太快易造成震蕩,太慢易導(dǎo)致輸出電壓異常。電阻R20和R26用于設(shè)定輸出電壓,但考慮效率和TL431正常工作所需2 μA電流。R20和R26電路上的電流應(yīng)大于TL431參考腳電流100倍,則有:R26<2.5 V/200 μA=12.5 kΩ,取R26=10 kΩ,則R20=86 kΩ;因TL431正常工作,Ika>1 mA,故一般要加一個R12=1.2 kΩ。
2.2.2 MP1584外圍電路參數(shù)
MP1584集成控制芯片工作頻率通過第6腳的接地電阻R8控制,設(shè)定開關(guān)工作頻率fs=1 MHz,則有R8
(11)
輸出電壓Vo由R6和R7組成的分壓電路接至第4腳(FB)設(shè)定,第4腳電壓VFB與他們的關(guān)系為
(12)
考慮MP1584空載時,約20 μA電流從高端流出,R7應(yīng)在40 kΩ以下,一般取R7=40.2 kΩ,VFB=0.7 V,可得R6=713.5 kΩ。
在開關(guān)工作狀態(tài)下,輸出電感應(yīng)向負載提供恒定電流。大電感值可獲得低紋波電流和電壓,但其尺寸大,電阻高和飽和電流較小。一般原則是電感電流紋波不得超過最大電流的30%。輸出電感值
(13)
其中:輸入電壓Vin=20 V;輸出電壓Vo=15 V;ΔIL=0.3×1.5=0.45 A;開關(guān)頻率fs=1 MHz;則可得到L1=8.3 μH。
3 試驗結(jié)果和討論
根據(jù)上述設(shè)計參數(shù),制作了MMUSM驅(qū)動系統(tǒng)輔助電源樣機。圖4為NCP396半橋LLC諧振變換器開關(guān)管(Q2)VGS和VDS波形。從波形可知Q2完全截止至與門級達到打開閾值存在一段時間,這段時間保證VDS為0,實現(xiàn)ZVS功能。圖5和圖6分別是負載電流為3 A和0.5 A時,諧振電容C6電流波形IC6和電壓波形VC6,以及MOSFET開關(guān)管 (Q2)VGS波形,波形反映出負載變輕時,電流波形諧波含量增加,但基本近似正弦波。圖7為諧振變換器主功率24 V輸出電壓紋波控制在96 mV,小于對應(yīng)額定輸出電壓+24 V的0.5%。圖8為基于MP1584的二次穩(wěn)壓輸出電壓紋波,紋波電壓<20 mV,小于對應(yīng)額定輸出電壓+15 V的0.2%。
試驗測試出非穩(wěn)定+15 V輸出在不同負載下負載調(diào)整率控制在0.5%以內(nèi),效率達到90%,諧振變換器效率達到89%,整機效率達到80%。

圖4 Q2:VGS,VDS波形Fig.4 Q2: The waves of VGS and VDS
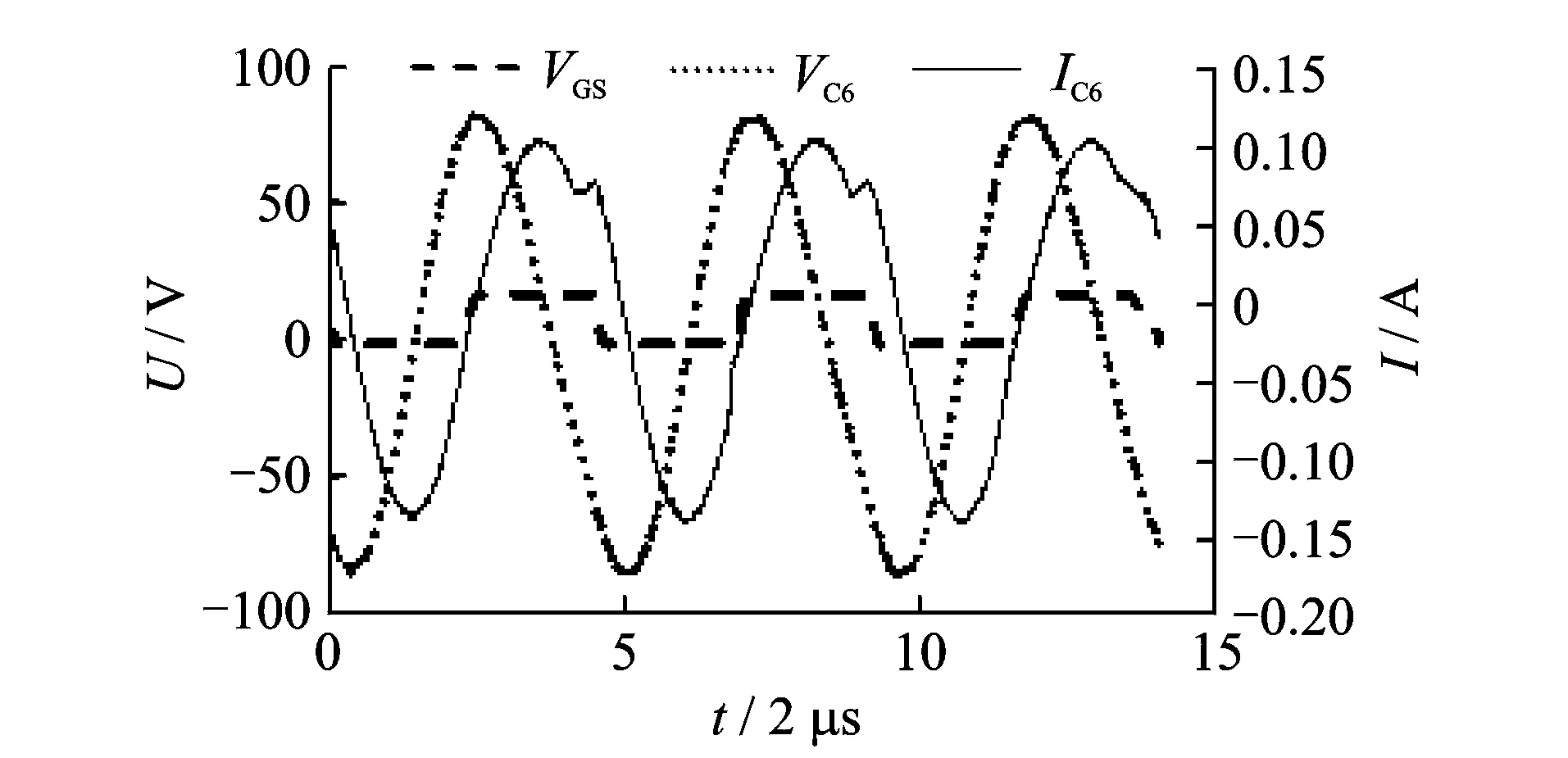
圖5 負載電流為3 A時,C6:IC6,VC6;Q2: VGS波形Fig.5 Load current is 3 A, the IC6, VC6 waves of C6; and the VGS wave of Q2
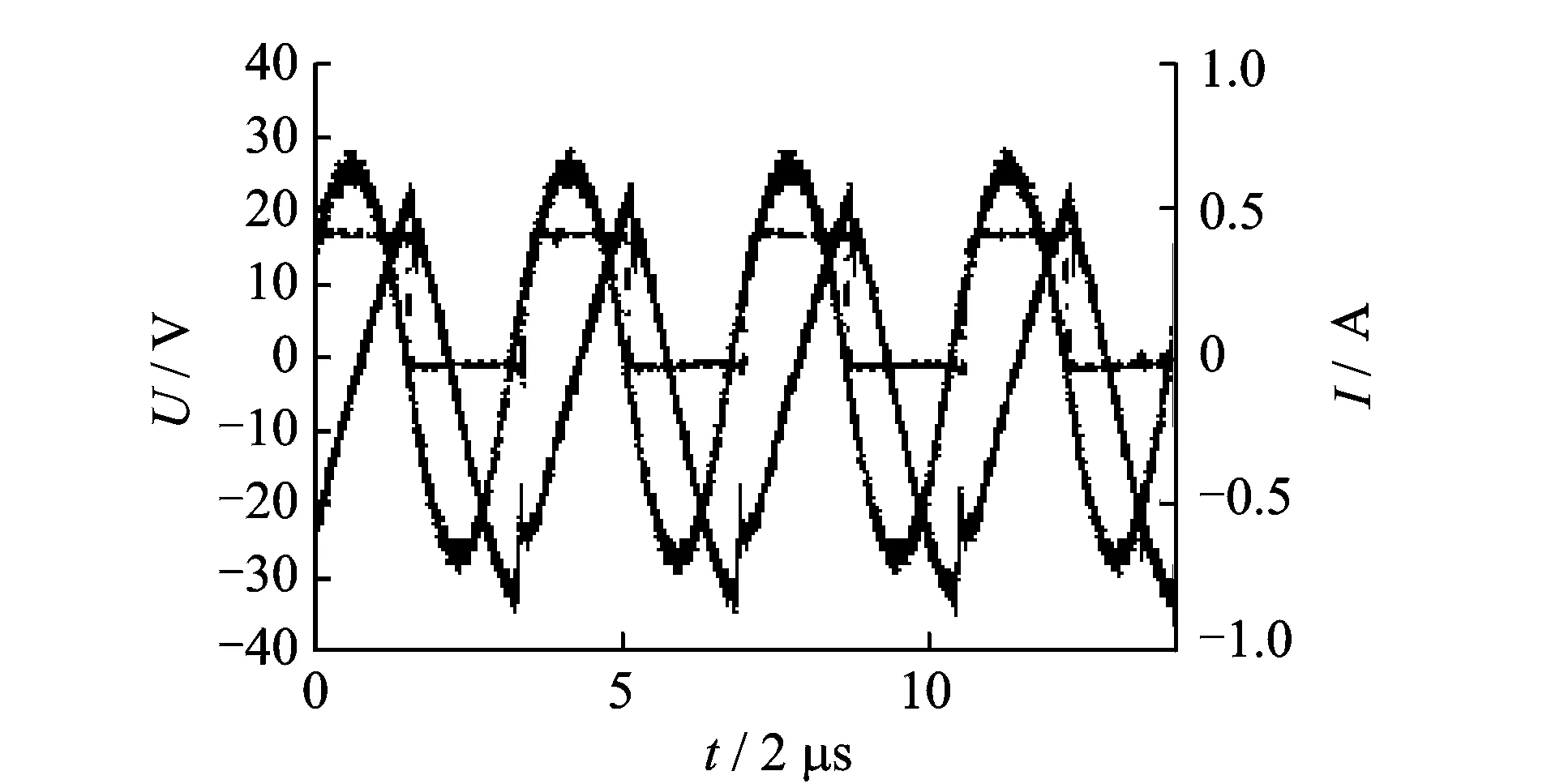
圖6 負載電流為0.5 A時,C6:IC6,VC6,Q2:VGS波形Fig.6 Load current is 0.5 A, the IC6, VC6 waves of C6; and the VGS wave of Q2
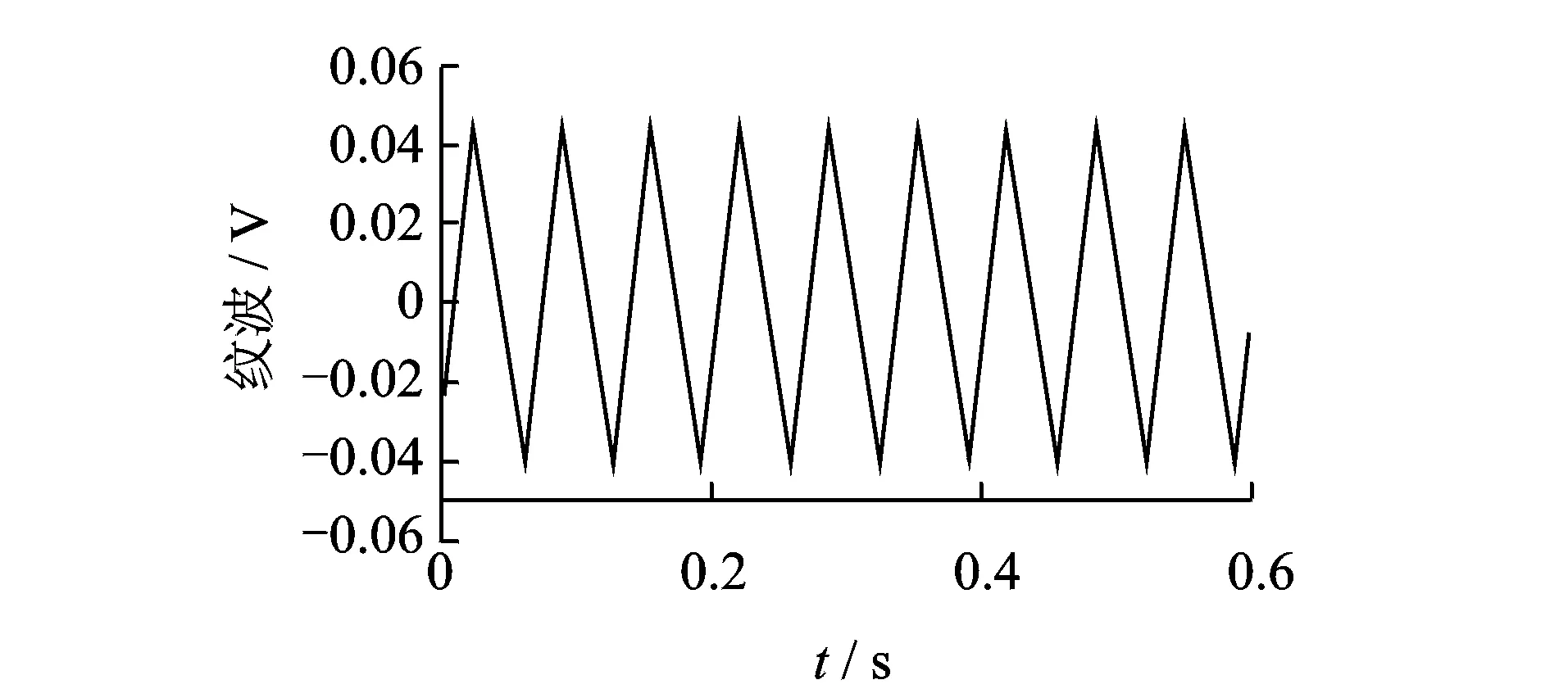
圖7 LLC諧振變換器24 V輸出電壓紋波Fig.7 Voltage ripple of 24 V output of LLC resonant converter

圖8 MP1584輸出電壓紋波Fig.8 Voltage ripple of MP1584 output
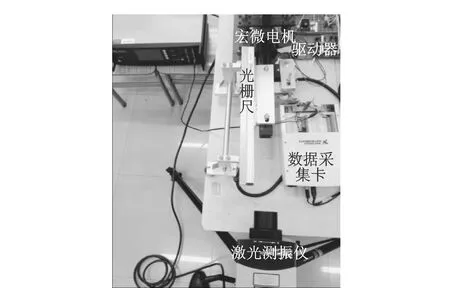
圖9 宏微超聲電機驅(qū)動系統(tǒng)Fig.9 Drive system of MMUSM
用設(shè)計的電源為圖9所示的MMUSM驅(qū)動系統(tǒng)供電,驅(qū)動MMUSM運行,光柵尺測量宏運動,激光測振儀測量微位移。圖10為MMUSM宏運動電壓與速度關(guān)系曲線,MMUSM速度與電壓關(guān)系呈非線性,且存在一定電壓死區(qū),在100~240 V和240~300 V 2個區(qū)間段存在不同的線性關(guān)系。圖11為MMUSM微位移與激勵電壓關(guān)系曲線,在100~300 V區(qū)間線性關(guān)系較好。
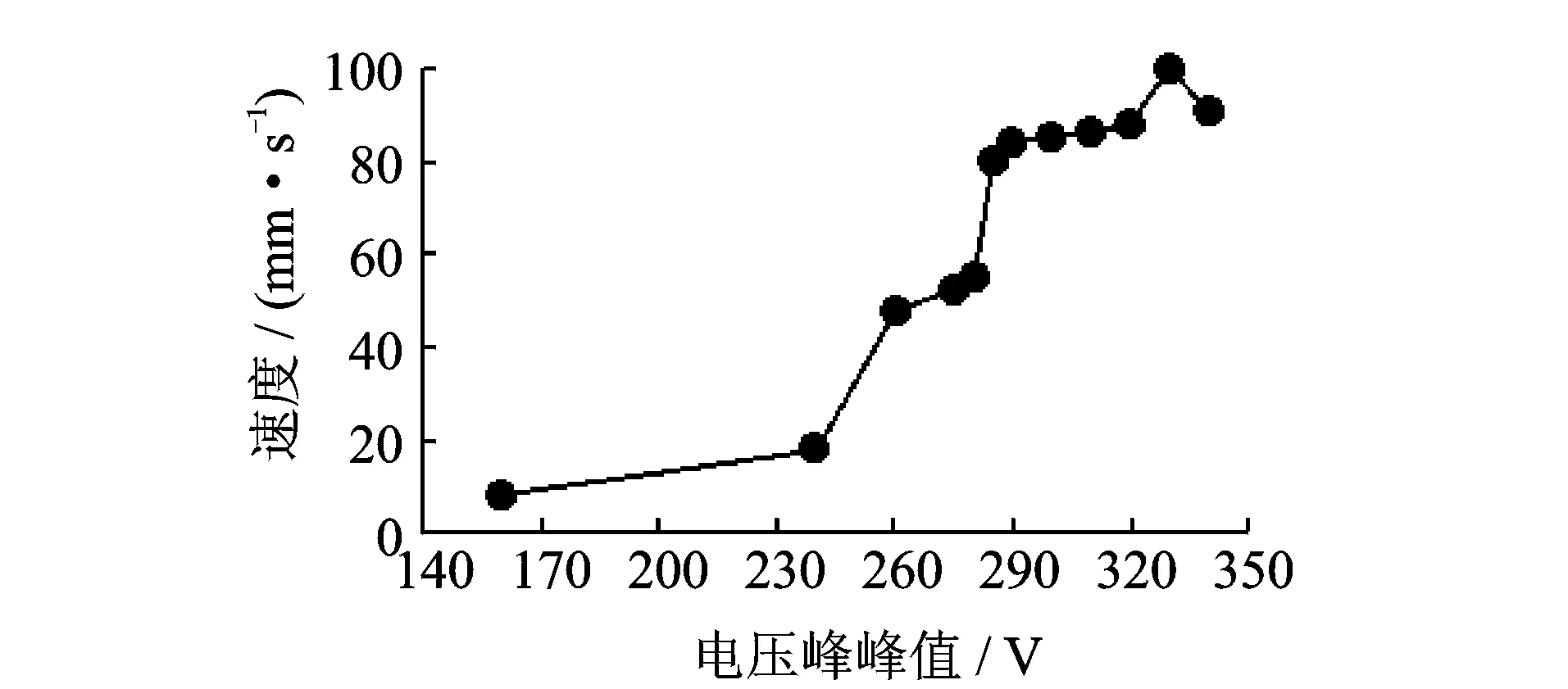
圖10 MMUSM速度與電壓關(guān)系Fig.10 Curve between MMUSM macro-speed and driving voltage

圖11 MMUSM微位移與激勵電壓關(guān)系Fig.11 Curve between MMUSM micro-displacement and excitation voltage
4 結(jié)束語
對MMUSM準確地驅(qū)動控制比較困難,尤其是在評估電機性能和控制算法效果時,采用高質(zhì)量的輔助電源供電確保系統(tǒng)穩(wěn)定工作是必要的。基于LLC諧振變換器+集成開關(guān)穩(wěn)壓二級結(jié)構(gòu)的穩(wěn)壓電源實現(xiàn)了小尺寸,高精度,無多路輸出交叉調(diào)整率問題。該電源很好地解決了MMUSM驅(qū)動系統(tǒng)供電問題,優(yōu)化了驅(qū)動系統(tǒng)結(jié)構(gòu)和可靠性,在工程上易于實現(xiàn)。MMUSM宏運動測量數(shù)據(jù)表明速度與電壓存在較大的非線性,為了更好的控制效果,需要結(jié)合MMUSM優(yōu)化,進一步改進驅(qū)動系統(tǒng)控制方法。
猜你喜歡
商品與質(zhì)量(2021年43期)2022-01-18 05:30:32
中學(xué)生數(shù)理化(高中版.高考理化)(2020年11期)2020-12-14 07:36:08
經(jīng)濟技術(shù)協(xié)作信息(2018年7期)2019-01-14 03:05:42
通信電源技術(shù)(2018年3期)2018-06-26 06:33:30
電子制作(2017年8期)2017-06-05 09:36:15
電子制作(2017年8期)2017-06-05 09:36:15
電子制作(2017年7期)2017-06-05 09:36:14
電子制作(2017年10期)2017-04-18 07:23:16
現(xiàn)代工業(yè)經(jīng)濟和信息化(2016年4期)2016-05-17 05:35:38
通信電源技術(shù)(2016年3期)2016-03-26 07:13:46
