五輪搬運車單側驅動行駛性能仿真研究
2019-11-06 07:17:44安曉蒙樊廣闊
汽車實用技術 2019年20期
關鍵詞:模型
安曉蒙,樊廣闊
(一汽解放汽車有限公司商用車開發院,吉林 長春 300130)
前言
五輪搬運車主要用于貨物在狹窄空間的短途運輸作業,采用剛性擺動懸架的五輪行駛系統如圖1 所示,驅動輪與轉向輪通過系統控制均可實現轉動以保證搬運車實現全向行駛,在圖示位置當驅動輪與轉向輪轉動90 度行駛時為搬運車縱向行駛,是單側驅動。在國內對于搬運車行駛性能仿真相關文章很多,但對于全向行駛搬運車保持單側驅動的行駛直線性仿真幾乎沒有,本文主要應用UG 與ADAMS 軟件對五輪搬運車進行在滿載與空載兩種工況下的單側驅動的縱向行駛直線性進行研究。
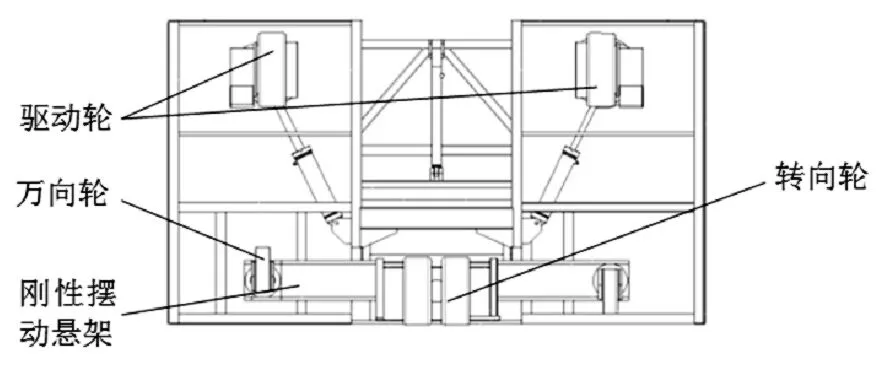
圖1 整車仰視圖
1 虛擬樣機模型的建立
1.1 三維模型建立
使用UG7.0 按實際尺寸依次建立五輪搬運車各零部件三維模型,主要包括:車架、剛性擺動懸架、門架式吊裝機構、駕駛室、驅動輪總成等部件,遵循先主后次的建模標準。對仿真過程不存在運動的零件進行布爾運算求和,減少在ADAMS/View 模塊內的操作,建模的理念是采用布爾運算的原則,順序應遵循由大到小、由外及內、由上至下、由實轉虛[1]。以最簡單的模型,達到最優的分析效果,如此既降低了建模復雜性,也提高了仿真運算效率,如圖2 所示。

圖2 五輪搬運車三維模型
1.2 模型接口導入
UG 創建的模型不能直接在ADAMS/View 軟件環境下直接打開,必須進行格式轉換,而以*.x_t 格式進行轉換的效果最好,不會出現模型失真和參數失效的情況。[2-3]
1.3 邊界條件設定
(1)為對搬運車的行駛性能進行仿真,需對所有輪胎與相對應的轉動軸、萬向輪與剛性擺動懸架之間添加旋轉副,在驅動輪對應的旋轉副上添加驅動Motion,Motion 采用階躍函數空載時以10s 加速到6km/h,滿載時以7s 加速到4km/h,其他零部件均添加固定副。
(2)路面譜文件和輪胎文件是對車輛做行駛性能仿真非常重要的一個步驟, 采用UA 輪胎模型將輪胎文件程序轉換成ADAMS 能識別的tir 的輪胎文件,完成對輪胎的建模,如圖3。利用路面譜生成器和EXCEL 生成路面譜文件,根據路面等級分類的八個等級,采用B 級路面。
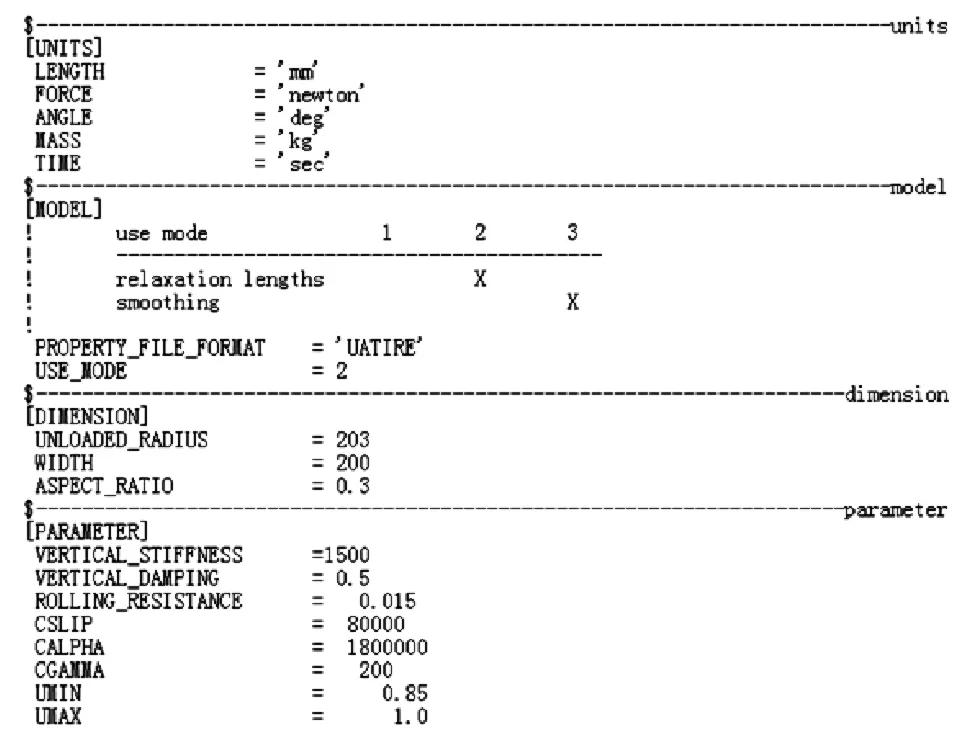
圖3 輪胎參數文件
2 行駛性能仿真分析

圖4 萬向輪橫置虛擬樣機圖
五輪搬運車的初始狀態均為萬向輪垂于叉車行駛方向如圖4 所示,空載時縱向行駛,叉車行駛軌跡如圖5 所示,左右萬向輪所受側向力如圖7 所示。滿載時縱向行駛,叉車行駛軌跡如圖6 所示,左右萬向輪所受側向力如圖8 所示。

圖5 空載萬向輪橫置叉車直線行駛軌跡圖

圖6 滿載萬向輪橫置叉車直線行駛軌跡圖

圖7 空載時縱向行駛左右萬向輪所受側向力曲線

圖8 滿載時縱向行駛左右萬向輪所受側向力曲線
3 結論
(1)通過對五輪搬運車空載和滿載兩種工況的行駛性能仿真分析結果可得,五輪搬運車在單側驅動、啟動時萬向輪垂直于行駛方向的工況下能夠保持行駛直線性。(2)同時可知啟動時萬向輪所有側向力在瞬時啟動時受力較大,然后逐漸趨于平衡。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
