新能源汽車制動系統的發展趨勢
2019-10-23 07:07:24蔣鳴雷
汽車實用技術 2019年19期
蔣鳴雷
(北京信息職業技術學院交通工程系,北京 100070)
引言[1]
制動系統是保證汽車安全行駛最重要的一項主動安全系統,是通過制動器與車輪的摩擦使行駛中的汽車按照駕駛員的意愿進行強制減速甚至停車,使汽車下坡行駛時保持速度穩定,以及在各種道路條件下停駛的汽車保持穩定不動的專門裝置。汽車在制動時,司機通過踩下剎車踏板,將腳踩力量傳遞給與剎車踏板相連推桿后的真空助力器上,通過真空助力器放大腳踩力,推動制動主缸活塞運動,產生壓力液流傳送、分配到各車輪的制動器上,使制動器與轉動輪轂之間產生摩擦制動力矩讓汽車減速或停止。汽車制動時制動力非常大,如果只靠人力直接作用于制動主缸活塞,司機在踩下制動踏板時會遇到很大的阻力,甚至有可能無法制動,因此該制動系統需要真空助力器將制動踏板的力放大。傳統燃油車真空助力器工作時的真空源來源于汽車發動機進氣歧管,非常穩定可靠,但新能源汽車特別是純電動車,由于沒有發動機總成,制動系統缺少真空動力源,因此缺乏真空助力功能,那新能源汽車將怎樣實現制動系統的助力呢?
1 采用電子真空泵的新能源汽車制動系統[2][3]
目前不少純電動新能源汽車在制動系統方面,保留了原來傳統燃油車的真空助力器和液壓制動管路,還在管路的另一側設置了一個電子真空泵,如圖1 所示。其工作過程為:車輛啟動,12 V 電源供電,電子控制系統(VCU)進行自檢,真空壓力傳感器測出真空罐內的真空度,轉換成相應電壓值送至控VCU,VCU 對該電壓值與原設定的真空度電壓值進行比較,如果電壓值低,說明真空罐內的真空度小于設定值,VCU 就發出控制命令讓電子真空泵開始工作,抽真空,當真空壓力傳感器測出真空罐內真空度達到設定值了,VCU 就發出命令讓真空泵停止工作。當由于制動消耗導致真空罐內的真空度小于設定值時,電動真空泵就再次開始抽真空。總之,真空壓力傳感器只要監測到真空助力器的真空度不足,電子真空泵就工作來保證真空助力器的真空度,使真空助力器能像原先燃油車那樣為駕駛員提供輔助助力制動作用。
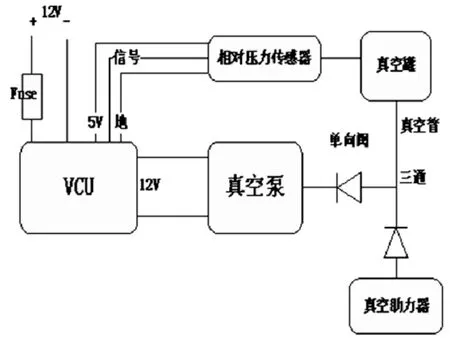
圖1 電動真空助力系統原理圖
采用這種制動系統控制技術,對于從燃油車底盤改造而來的新能源汽車來說,原有的真空助力器及相關管路基本不變,只是將從發動機進氣歧管引入真空環境的接口管路變換到單設的真空泵上,利用真空泵來保證真空環境,但其制動原理則與傳統燃油車的制動系統完全相同。這樣使得車輛設計生產變動很小,原有燃油車的設計方案、裝配生產線等都可以得到充分利用,節約時間及經濟成本,是當前比較理想的一種過渡方案。但該方案的缺陷是電子真空泵的工作穩定性不足,而且由于真空泵頻繁啟動導致壽命較短,不是非常適合作為唯一的真空源提供元件,這樣一旦電子真空泵出現任何工作問題,就會導致出現制動故障。因此該設計方案僅僅是為了節省成本,延續保留原傳統汽車大部分制動系統的過渡方案,并非徹底解決新能源汽車制動問題最佳方案。
2 采用智能化助力器的新能源汽車制動系統[3][4]
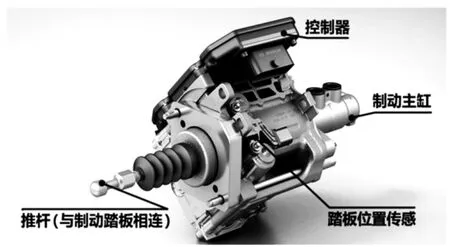
圖2 Bosch(博世)iBooster 智能助力器
如果在制動踏板和制動主缸之間設計一種助力裝置來代替傳統的真空助力器,那就可以不再依賴真空源,從而徹底消除制動系統對真空的依賴。目前博世公司推出了一套名為iBooster 的智能化助力器,如圖2 所示。它是利用電控方式來輔助控制制動力。簡單來說,就是將原真空助力制動系統中的真空助力器去掉,換成由電子控制單元和電機驅動機構組成的智能助力器,駕駛員踩下制動踏板不再是傳遞的力,而是傳遞一個電信號給智能助力器,助力器通過踏板位置傳感器檢測到踏板踩下行程位置的變化,控制器以此為依據結合實際車輛運行工況計算出需要的制動力,控制器控制電機給出制動助力所需的力矩到制動總泵,制動總泵驅動液壓系統傳遞制動力到ABS/ESP 制動防抱死/電子穩定系統控制器,ABS/ESC 再根據車輛狀況把制動力分配到四個車輪。
iBooster 智能化助力器完全是靠電控制而不用真空來實現整個助力過程的控制,制動更平順更柔滑,同時反應速度也比傳統車輛制動效果好得多,它的控制單元能和車身電子穩定系統ESP 合作,實現能量回收,讓新能源汽車更好地實現節能、環保。
此外大陸公司也推出一套MK C1 制動系統,其工作理念和博世iBooster 基本相同。但是MK C1 除了完全取代真空助力器外,還集成了ESP 電子穩定系統,ABS 和 ESC 功能,其模塊化設計的好處是能更集成化和小型化,顯著提高 ABS 和 ESC 的主動制動響應速度,而且由于系統是集成設計,系統能直接控制執行所有制動動作。
3 采用線控制動的新能源汽車制動系統[4][5]
隨著傳感器與網絡技術的快速發展,線控技術已成為汽車控制技術的未來發展方向。汽車的線控制動(BBW)系統,是用線控電子機械制動器代替了代替液壓的制動系統,電源取代了傳統的液壓源,機電動作器取代了液壓的作動設備。傳統液壓制動系統的元件,像主缸、真空增壓設備、液壓管路等均被機電結合的一體化元件所取代,如液壓鼓式或盤式制動器及調節器被電腦控制的驅動電機所代替,制動時制動力的大小由電控ECU 調控,驅動電機逆轉產生制動力。線控制動系統電腦根據電子踏板傳感器將剎車踏板踩下的速度信號與位移行程變化,結合車輪轉速等信息,向制動電機發送工作信號并控制電機的電流與轉子轉角,產生制動所需的力矩,實現車輪制動。
線控制動(BBW)系統與傳統制動系統相比,沒有了制動油缸、液壓閥、助力裝置、油箱以及復雜的液壓管路等液壓部件,結構簡單,維護方便,布置靈活,可控性好與響應速度快等特點。此外只要設計好相應的控制程序,可根據實際情況自如控制制動力的大小,控制各軸的制動力分配,完全能夠實現傳統液壓制動的ABS、ASR 等功能,是未來無人駕駛汽車不可或缺的配置。
但線控制動(BBW)系統目前也存在控制技術難度大、需要多個驅動能源、控制系統失效如何處理及電子元件抗干擾等問題。
4 新能源汽車制動時的能量回收[6][7]
傳統燃油車中,大部分車輛不帶制動能量回收系統,而新能源汽車特別是純電動汽車均帶有制動能量回收系統,新能源汽車利用減速、制動時電動機轉變為發電機,將動能轉化為電能,再存儲到動力電池中, 這就是新能源汽車制動時的能量回收。
電動汽車制動時的能量回收一般采用再生制動方式,再生制動也被稱為反饋制動或者制動能量回收,是指電動汽車在實施制動或下坡慣性滑行中,動力電池輸出電源關閉,制動力拖動電動機慣性反向轉動,通過電路切換,使電機轉子產生磁場,電機定子線圈繞組切割磁力線,感應出電動勢,產生電流通過功率變化器流入動力電池,將制動中消耗的機械能轉化為電能,此時電動機為發電狀態,這個過程稱為再生制動。在再生制動中,制動應盡可能采用線控制動方式的電機回饋發電制動來取代機械式制動,制動鏈接采用電力連接,能有效減少了機械損失,提高能量回收效率。
5 結束語
總之,無論是電動車還是傳統采用內燃機的汽車,制動系統電子化是未來汽車制動技術發展的必然趨勢,隨著新能源汽車和無人駕駛技術的飛速發展,與傳統真空助力液壓制動系統相比,全電子控制的電子機械一體化制動系統具有智 能化優勢,在提高制動的舒適性、穩定性的方向有著很大的優越性,也必將成為新能源汽車未來制動系統發展的主流。
猜你喜歡
英語世界(2022年9期)2022-10-18 01:11:18
金橋(2020年9期)2020-10-27 01:59:44
中學生數理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
商周刊(2017年17期)2017-09-08 13:08:58
瞭望東方周刊(2016年40期)2016-11-02 18:30:31
作文大王·低年級(2016年4期)2016-04-18 00:24:37
風能(2015年4期)2015-02-27 10:14:36
風能(2015年4期)2015-02-27 10:14:34
決策探索(2014年21期)2014-11-25 12:29:50
