基于雙橫臂的1/4汽車模型及其等效模型的建模控制研究
2019-10-19 01:41:10朱柏霖上官文斌SubhashRakheja
振動與沖擊 2019年10期
朱柏霖,秦 武,上官文斌,Subhash Rakheja
(華南理工大學(xué) 機械與汽車工程學(xué)院,廣州 510641)
懸架系統(tǒng)作為所有車輛的重要組成部分,其主要作用是承受車身重量,衰減來自路面的不平度激勵和提供良好的輪胎路面接觸以確保車輛的行駛安全性[1]。半主動懸架系統(tǒng)的控制力由CDC(Continuous Damping Control)減振器或磁流變減振器產(chǎn)生,控制算法一般采用不依賴系統(tǒng)參數(shù)的天棚控制算法[2]。目前研究論文中,雖然提出了很多類似于天棚控制的半主動控制算法,例如SH-ADD(Mixed Sky-Hook and Acceleration-Driven-Damper)[3]、SH-PDD(Mixed Skyhook and Power-Driven-Damper)[4]等,但是由于需要復(fù)雜的信號輸入和準確模型參數(shù)等原因,上述算法還沒有運用到實車上。半主動懸架相比于主動懸架,具有更好的穩(wěn)定性,但控制效果相對較差[5]。
在懸架的主動控制研究方面,目前有各種基于各種控制理論的主動懸架控制算法。較為成熟的算法有線性二次最優(yōu)控制算法LQG(Linear Quadratic Gaussian Control)[6]和滑模控制算法[7]等,這些算法都需要知道準確的懸架模型參數(shù)。控制算法中需要的一些狀態(tài)變量一般通過狀態(tài)觀測器獲得,而構(gòu)造狀態(tài)觀測器也需要獲取懸架模型的準確參數(shù)[8-9]。基于以上原因,基于主動算法的主動懸架,目前在實車上應(yīng)用較少。
在懸架的主動控制算法的研究中,控制算法和狀態(tài)觀測器都是在簡單的二自由度模型的基礎(chǔ)上推導(dǎo)和證明的。研究表明,使用名義參數(shù)的二自由度模型能夠很好地反映麥弗遜懸架的振動特性[10]。但是對于結(jié)構(gòu)更復(fù)雜的雙橫臂懸架,使用名義參數(shù)的二自由度模型求得的簧載質(zhì)量和非簧載質(zhì)量的響應(yīng)與由基于雙橫臂懸架的1/4汽車模型求得的響應(yīng)相差較大[11]。如果使用辨識參數(shù)的二自由度模型能夠真實體現(xiàn)雙橫臂懸架的振動特性,將加強這些依賴懸架模型參數(shù)的控制算法的實用性。因此,在進行雙橫臂懸架控制算法設(shè)計時,需要通過參數(shù)辨識方法得到準確的二自由度模型參數(shù)。
目前在基于懸架三維多體動力學(xué)的1/4汽車模型計算得到的簧載質(zhì)量和非簧載質(zhì)量的響應(yīng),來識別簡化二自由度模型參數(shù)的辨識算法中,在三維多體動力學(xué)建模時,沒有考慮懸架中橡膠彈性元件(如懸架擺臂襯套、減振器上端支撐等)的影響,并且都把減振器設(shè)置為線性阻尼特性[12-13]。
綜上所述,目前半主動懸架和主動懸架的研究主要集中在控制算法上,對控制算法在實際應(yīng)用中的有效性研究較少。在辨識1/4汽車模型的等效二自由度模型的參數(shù)時,對等效為真實1/4汽車系統(tǒng)的仿真模型作了過多的簡化。
本文首先建立了基于雙橫臂懸架的1/4汽車三維多體動力學(xué)模型,模型中將減振器設(shè)置為分段線性阻尼特性(拉伸阻尼系數(shù)和壓縮阻尼系數(shù))。根據(jù)1/4汽車模型的簧載質(zhì)量和非簧載質(zhì)量的響應(yīng),辨識出等效二自由度模型的參數(shù)。研究了懸架系統(tǒng)中橡膠彈性元件的剛度特性對等效二自由度模型參數(shù)辨識結(jié)果的影響。建立了基于參考模型的滑模控制算法,證明了等效二自由度模型的參數(shù)辨識對控制算法的重要性和必要性。
1 基于雙橫臂懸架的1/4汽車模型和等效二自由度模型
圖1(a)為基于雙橫臂懸架的1/4汽車模型(下文簡稱1/4汽車模型),圖1(b)為等效的二自由度模型。兩個模型等效的原則是:利用二自由度模型和利用1/4汽車模型計算得到的簧載質(zhì)量與非簧載質(zhì)量的響應(yīng)接近。首先建立1/4汽車模型,計算其簧載質(zhì)量和非簧載質(zhì)量的動力學(xué)響應(yīng)。通過參數(shù)辨識的方法,辨識等效二自由度模型的參數(shù),使得由采用辨識參數(shù)的等效二自由度模型計算得到的簧載質(zhì)量和非簧載質(zhì)量的響應(yīng)與由1/4汽車模型計算得到的動力學(xué)響應(yīng)一致。
1/4汽車模型由上下控制臂、車輪與轉(zhuǎn)向節(jié)、彈簧與減振器,以及轉(zhuǎn)向橫拉桿連接而成,如圖1(a)所示。上、下控制臂的一端分別通過襯套B1,B2,B3,B4與車身相連,另一端分別通過球鉸C和G與轉(zhuǎn)向節(jié)相連;車輪與轉(zhuǎn)向節(jié)剛性連接,視為一個剛體;彈簧與減振器上端通過橡膠支撐TM與車身相連,下端通過球鉸A與下控制臂相連;轉(zhuǎn)向橫拉桿一端由球鉸F與車身相連,另一端則由球鉸E與轉(zhuǎn)向節(jié)相連;車身設(shè)置為只有垂向自由度的簧載質(zhì)量塊。
1/4汽車模型參數(shù)的數(shù)值根據(jù)附表1進行設(shè)定,其中各參數(shù)數(shù)值為單個元件的物理特性參數(shù)的數(shù)值,即名義值。橡膠元件的剛度表現(xiàn)為非線性特性,建模時只考慮其在局部坐標系下的線性段剛度,具體參數(shù)見附表2[14]。計算分析時,保證輸入激勵使橡膠元件的變形保持在線性段內(nèi)。
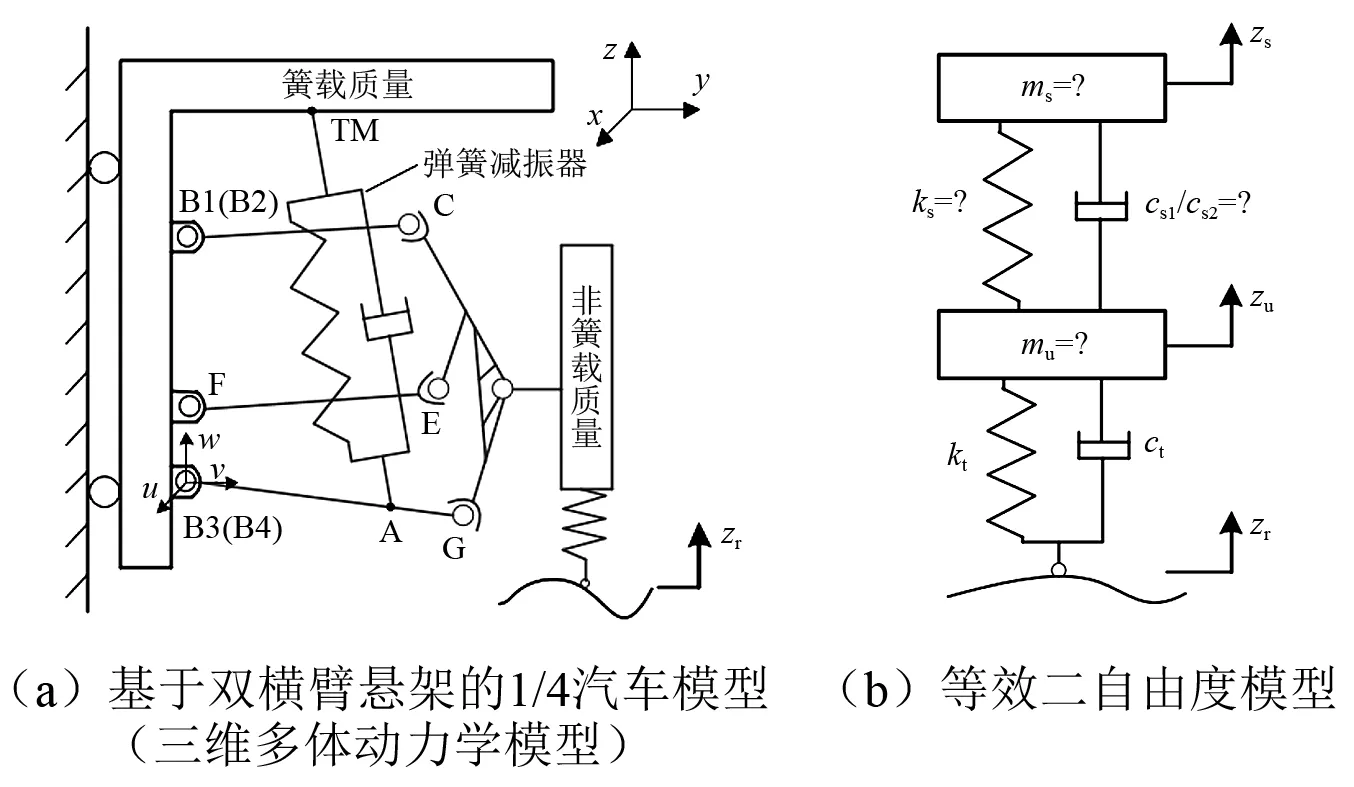
圖1 基于雙橫臂懸架的1/4汽車模型和等效二自由度模型Fig.1 Diagram of a quarter-car model with double wishbone suspension and an equivalent 2DOFs model
1.1 等效二自由度模型參數(shù)辨識方法
本文采用最小二乘法[15]對二自由度模型進行參數(shù)辨識,已知參數(shù)與需要辨識的參數(shù)如表1所示。
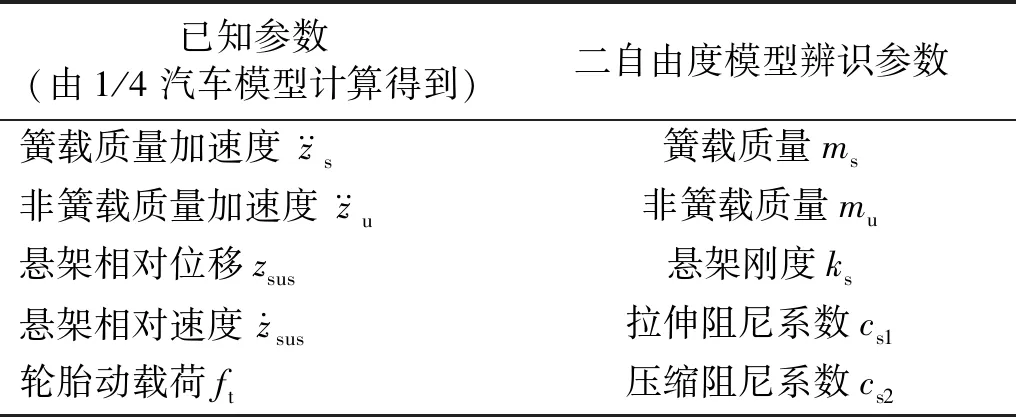
表1 已知參數(shù)與辨識參數(shù)Tab.1 Known and identified parameters
根據(jù)圖1(b)可以得到二自由度模型在平衡位置的運動微分方程
(1)
式中:fs,fd和ft分別為彈簧力、阻尼力和輪胎動載荷,分別定義為
fs=kszsus=ks(zs-zu)
(2)
(3)
(4)
式中:zsus為懸架相對位移。
令需要辨識的參數(shù)向量為
A=[ms,mu,ks,c1,c2]
(5)
狀態(tài)變量為
(6)
(7)
即可將式(1)所示的微分方程寫成矩陣的形式
(8)
(9)
令?E/?A=0,將得到
(10)
因此,需要辨識的參數(shù)即由式(11)求得
(11)
1.2 等效二自由度模型參數(shù)辨識結(jié)果
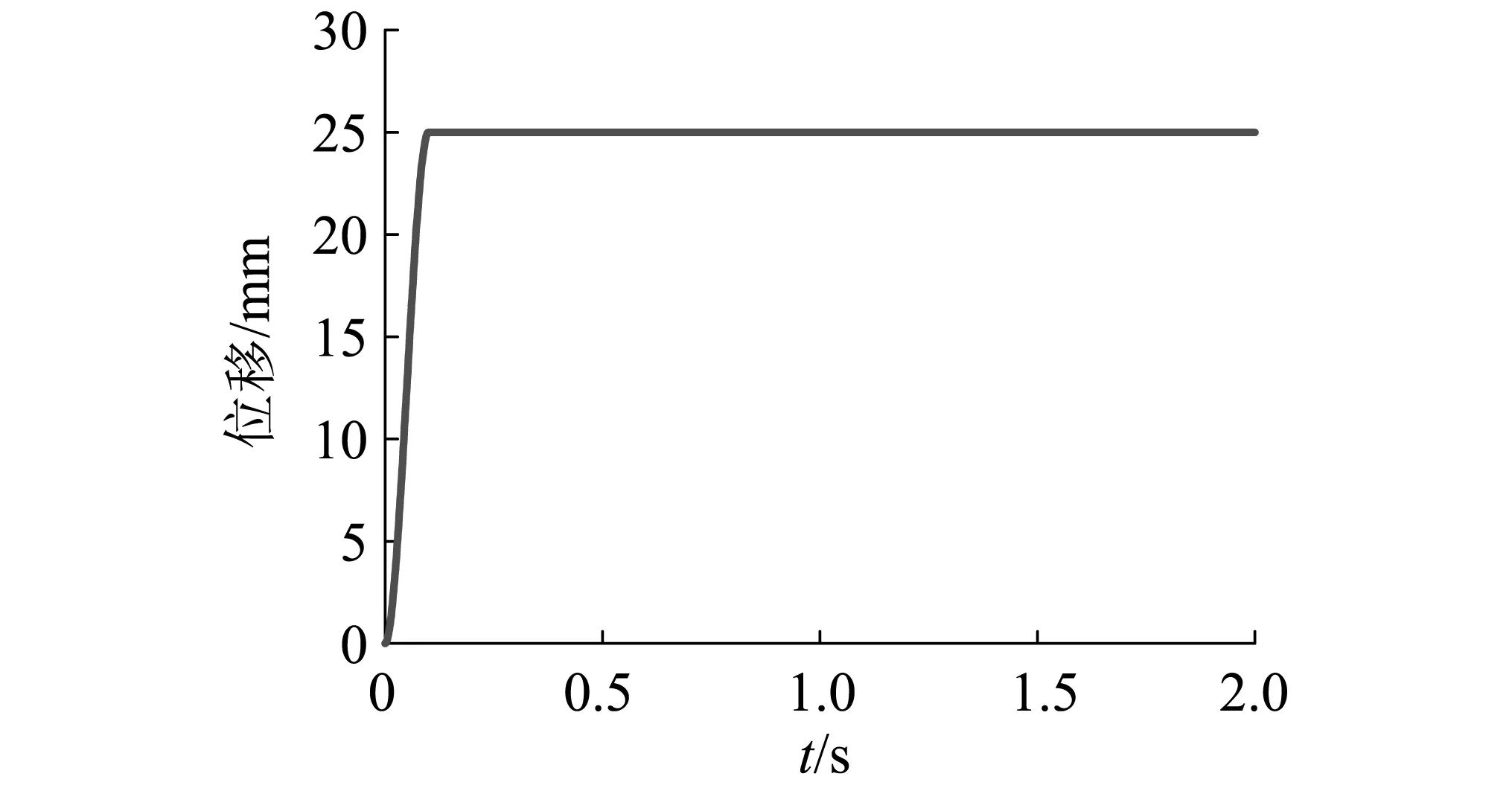
在對1/4汽車模型及其等效二自由度模型進行的動力學(xué)響應(yīng)分析時,路面位移輸入為階躍輸入函數(shù),表達式見式(12),單位為mm,其圖形見圖2。
(12)
(a)時域
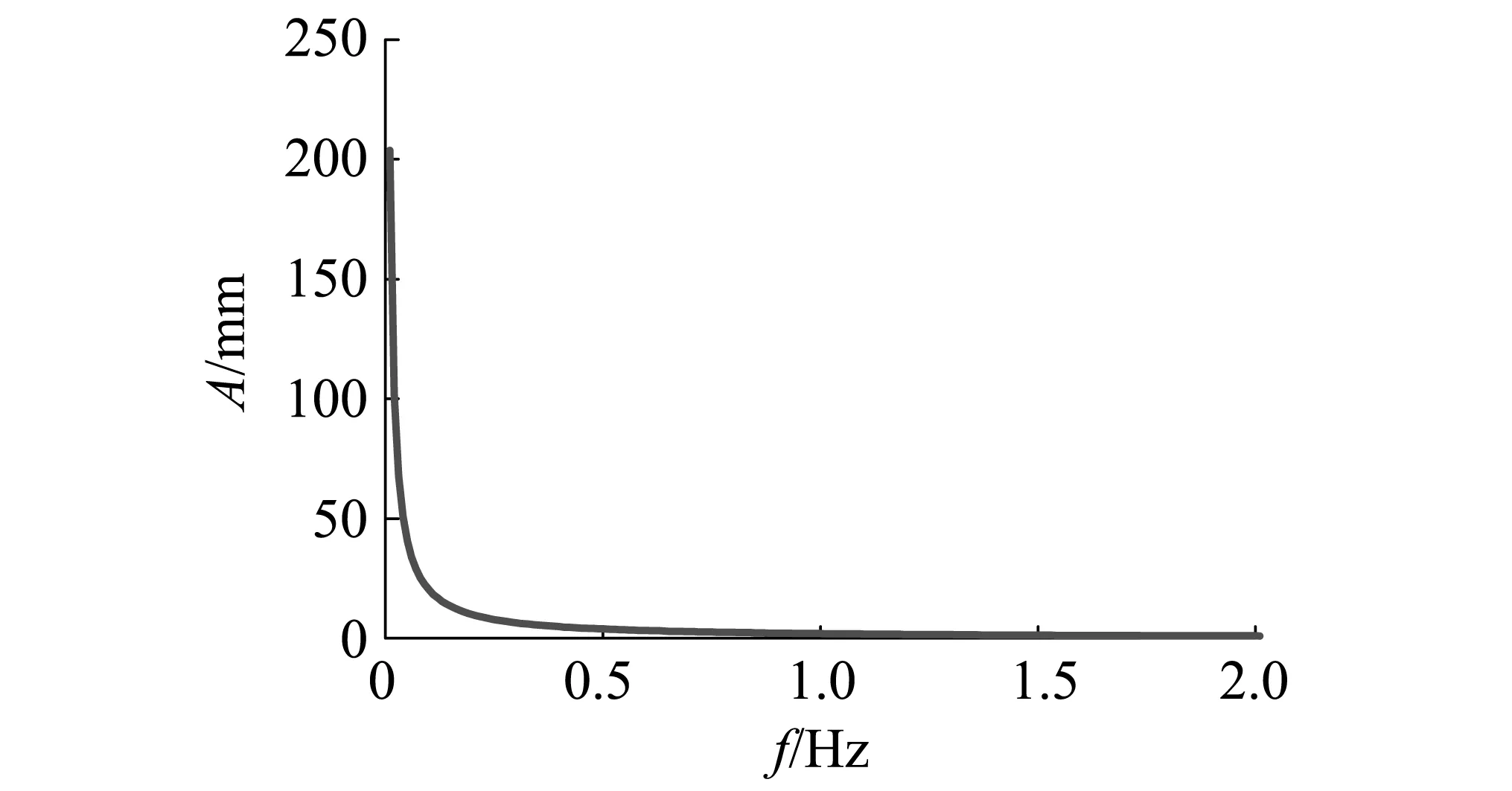
(b)頻域圖2 路面位移階躍輸入Fig.2 Step input of road displacement
不考慮懸架中橡膠元件的剛度特性,1/4汽車模型的動力學(xué)響應(yīng)的計算值見圖3。將位移階躍輸入下得到的1/4汽車模型的動力學(xué)響應(yīng)(見圖3)數(shù)據(jù)代入式(11),計算得到的等效二自由度模型參數(shù)見表2。由表2可知,等效二自由度模型中的剛度和阻尼系數(shù)的數(shù)值和1/4汽車模型中相關(guān)參數(shù)的名義值有較大的差異。這是由于懸架結(jié)構(gòu)引起的非線性、懸架減振器阻尼系數(shù)的非線性等引起的。相對于名義值,辨識參數(shù)中的懸架彈簧剛度和拉伸阻尼系數(shù)的數(shù)值都減小了56%,而壓縮阻尼系數(shù)的數(shù)值只減小了26%。但是等效二自由度模型中的質(zhì)量參數(shù)的數(shù)值與名義值接近,說明由懸架結(jié)構(gòu)、懸架減振器阻尼系數(shù)引起的非線性對等效二自由度模型中的質(zhì)量參數(shù)影響較小。

圖3 位移階躍輸入下的1/4汽車模型的響應(yīng)Fig.3 Dynamic responses of a quarter-car model under the step input of displacement
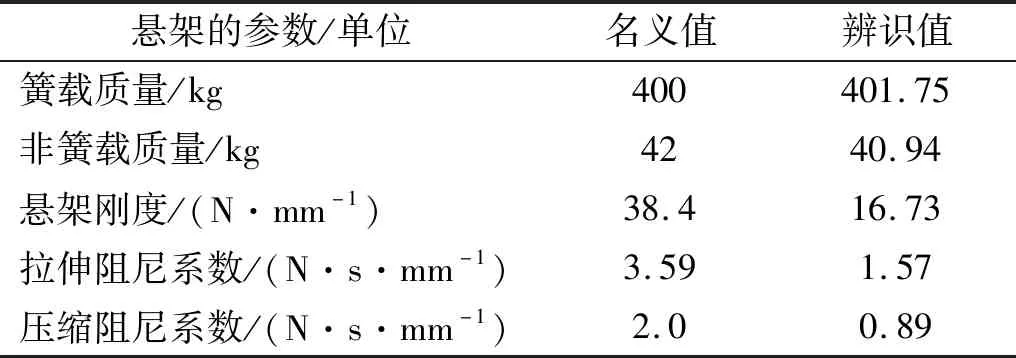
表2 等效二自由度模型參數(shù)辨識結(jié)果Tab.2 Identified parameters of the equivalent 2DOFs model
1.3 參數(shù)辨識結(jié)果的驗證
為了下文敘述方便,對分析的不同1/4汽車模型和等效二自由度模型進行定義,見表3。將模型Ⅰ~模型Ⅲ的動力學(xué)響應(yīng)特性在時域和頻域中進行對比,如圖4和圖5所示。
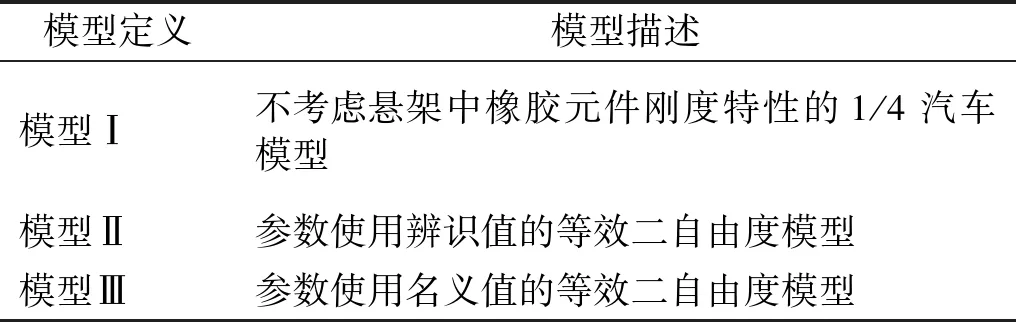
表3 1/4汽車模型和等效二自由度模型的定義Tab.3 Definitions of a quarter-car model and an equivalent 2DOFs model
模型Ⅰ~模型Ⅲ的時域響應(yīng)分別通過ADAMS建模求解和基于Matlab/Simulink軟件編程求解。由于這些模型均是具有非線性的模型,其動力學(xué)響應(yīng)的頻率響應(yīng)曲線采用文獻[16]中求解非線性系統(tǒng)近似頻率響應(yīng)曲線的方法求得。通過施加單頻率正弦位移激勵,利用系統(tǒng)響應(yīng)信號自功率譜與輸入信號自功率譜的比值,作為系統(tǒng)響應(yīng)信號在該頻率下的頻率響應(yīng)幅值;不斷改變輸入正弦位移激勵的頻率,即可畫出一條完整的非線性系統(tǒng)近似頻率響應(yīng)曲線。
由圖4可知,模型Ⅰ和模型Ⅱ中簧載質(zhì)量加速度、非簧載質(zhì)量加速度、懸架相對位移和輪胎動載荷響應(yīng)的時域響應(yīng)曲線幾乎重合,證明了辨識方法的準確性;模型Ⅲ的簧載質(zhì)量加速度和輪胎動載荷的響應(yīng)曲線幅值比模型Ⅰ的相關(guān)量響應(yīng)幅值大,而模型Ⅲ的非簧載質(zhì)量加速度和懸架相對位移的響應(yīng)曲線幅值比模型Ⅰ的相關(guān)量響應(yīng)幅值大小。
由頻率響應(yīng)(見圖5)曲線可知,模型Ⅲ中的響應(yīng)曲線幅值與模型Ⅰ相差較大,并且系統(tǒng)的一階固有頻率也發(fā)生了較大變化。因此,使用該最小二乘參數(shù)辨識方法得到的等效二自由度模型(模型Ⅱ)比模型Ⅲ更好地表征1/4汽車模型中簧載質(zhì)量與非簧載質(zhì)量的運動。
為了研究路面的輸入對等效二自由度模型參數(shù)辨識結(jié)果的影響,采用式(13)的多頻率正弦疊加位移輸入,單位為mm

圖4 模型Ⅰ~模型Ⅲ的時域響應(yīng)曲線(路面的輸入為式(12))Fig.4 Dynamic responses of model Ⅰ—model Ⅲ in time domain (the input of displacement is formula (12))
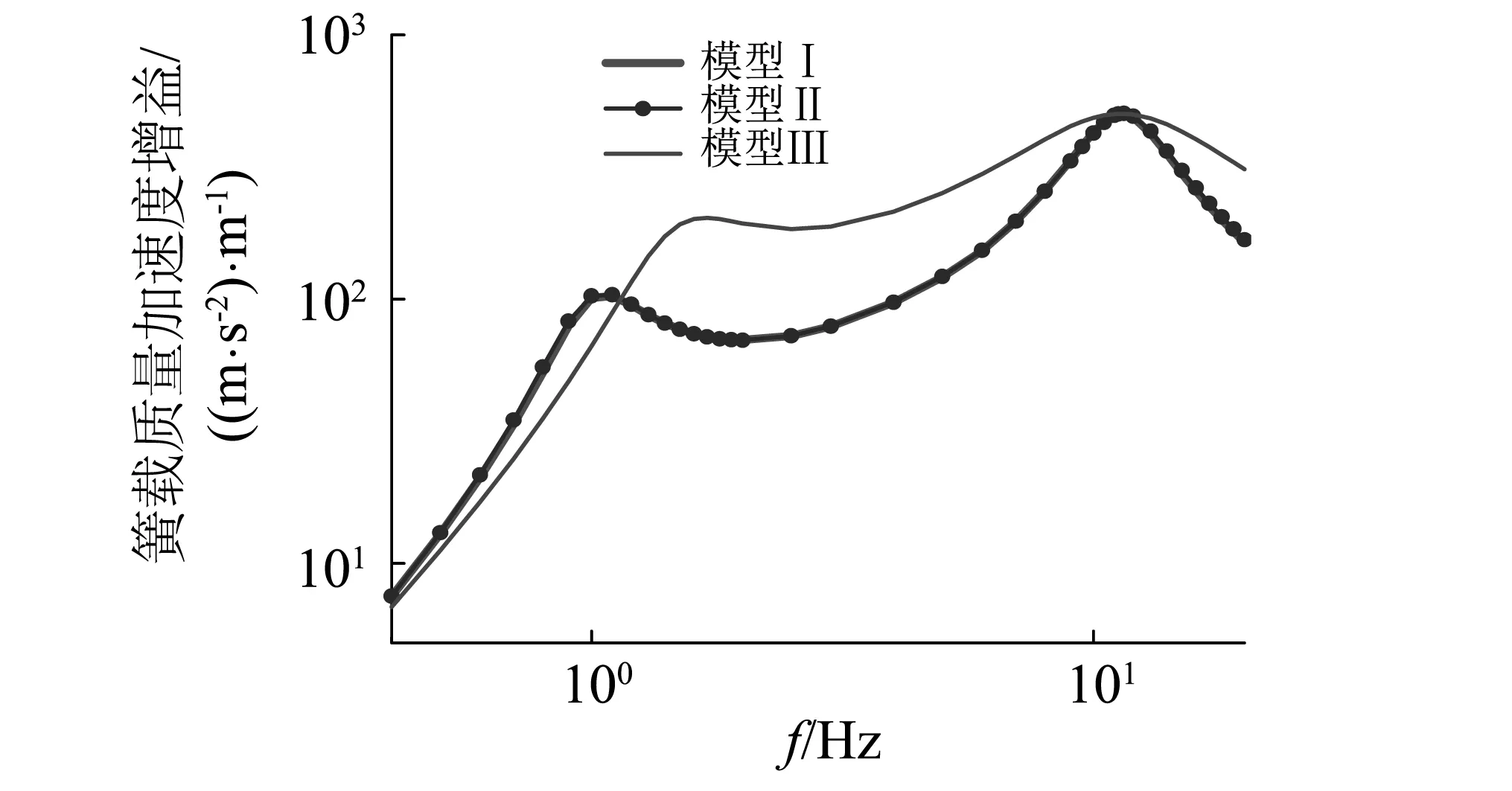
(a)簧載質(zhì)量加速度
(b)輪胎動載荷
圖5 模型Ⅰ~模型Ⅲ的頻率響應(yīng)曲線
Fig.5 Frequency responses of modeⅠ—model Ⅲ
zr=20sin(2πt)+5sin(2πt×5)+sin(2πt×11)
(13)
在式(13)的輸入下,采用上述方法,辨識得到的等效二自由度模型的參數(shù)見表4。
由表4可知,多頻率正弦疊加位移輸入下的辨識結(jié)果中的各參數(shù)數(shù)值與位移階躍輸入下的辨識結(jié)果的差異均小于5%,差異較少,證明了所用辨識方法具有通用性。
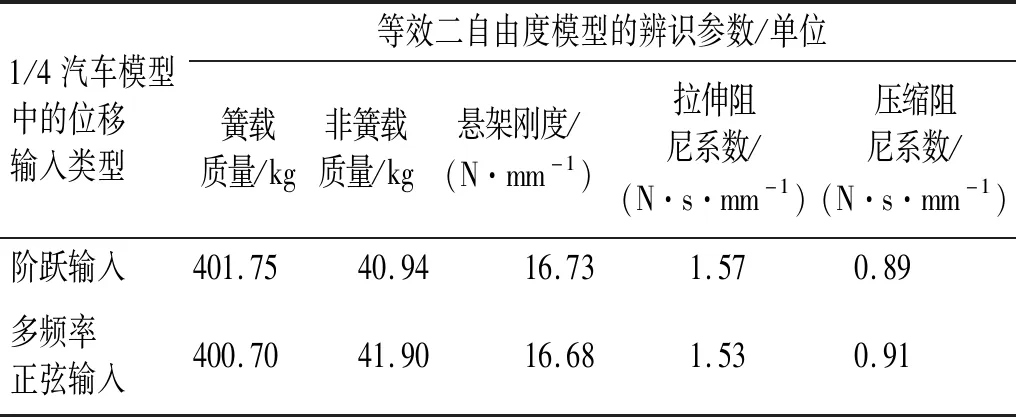
表4 階躍和多頻率正弦輸入下的等效二自由度模型的參數(shù)辨識結(jié)果對比Tab.4 Identified parameters of the equivalent 2DOFs model under the step and the multi-frequency sine inputs
2 懸架中橡膠元件剛度特性對等效二自由度模型參數(shù)辨識結(jié)果的影響
懸架中的橡膠元件包括控制臂襯套、減振器上端支撐等橡膠元件,其剛度特性影響汽車的平順性和操縱穩(wěn)定性。在1/4汽車模型中,控制臂與車身通過襯套連接、彈簧和減振器與車身通過減振器上端支撐連接。為了下文敘述方便,對建立不同的1/4汽車模型及對應(yīng)的等效二自由度模型進行定義,見表5。在式(12)的位移階躍輸入下,根據(jù)計算四種1/4汽車模型的動態(tài)響應(yīng),利用第2節(jié)中的計算方法,計算得到的等效二自由度模型的參數(shù)見表6。
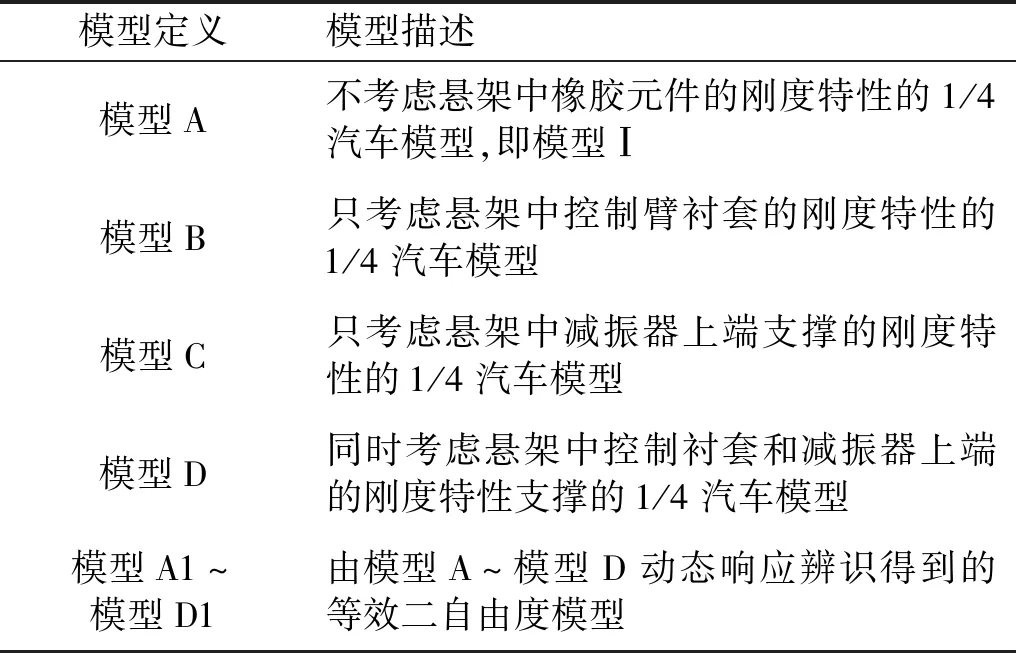
表5 不同的1/4汽車模型及對應(yīng)的等效二自由度模型的定義Tab.5 Definitions of different quarter-car model and the corresponding equivalent 2DOFs model
由表6可知,懸架中橡膠元件的剛度特性主要影響二自由度模型中懸架剛度和阻尼系數(shù)的辨識結(jié)果,而對質(zhì)量參數(shù)的影響較小。控制臂襯套對等效二自由度模型中懸架剛度的辨識結(jié)果有明顯的影響,模型B1的懸架剛度數(shù)值相對于模型A1增加了20%,模型C1的懸架剛度數(shù)值相對于模型A1減少了10%。由此可見,控制臂襯套會使等效二自由度模型的懸架剛度數(shù)值加大,而減振器上端支撐會使等效二自由度模型的懸架剛度數(shù)值減小。總體上,模型D1的懸架剛度數(shù)值相對于模型A1增加了13%。
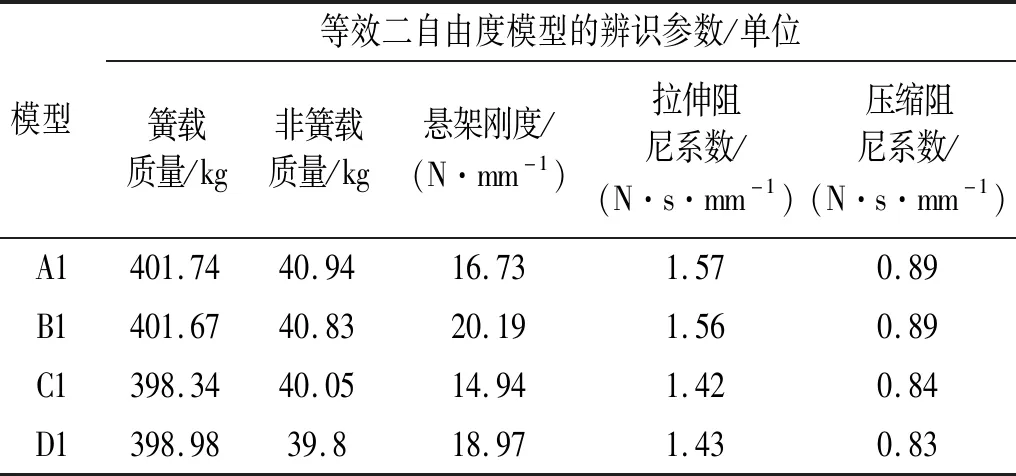
表6 等效二自由度模型質(zhì)量、剛度與阻尼系數(shù)的辨識結(jié)果Tab.6 Identified mass,stiffness and damping coefficients of the equivalent 2DOFs model
等效二自由度模型B1的阻尼系數(shù)數(shù)值與等效二自由度模型A1的辨識結(jié)果基本一致,而模型C1和模型D1的拉伸阻尼系數(shù)和壓縮阻尼系數(shù)的數(shù)值基本一致,相對于模型A1的拉伸阻尼系數(shù)和壓縮阻尼系數(shù)的數(shù)值分別減少了9%和6%左右。可見,控制臂襯套對辨識參數(shù)結(jié)果中的阻尼系數(shù)的數(shù)值基本沒有影響,而減振器上端支撐將會減小辨識參數(shù)結(jié)果中的阻尼系數(shù)的數(shù)值。
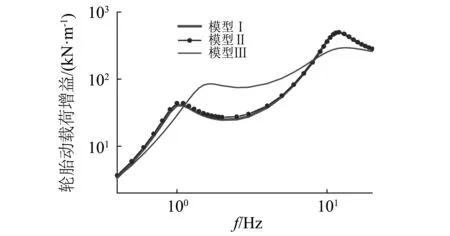
等效二自由度模型懸架剛度數(shù)值的變化將影響簧載質(zhì)量與非簧載質(zhì)量的固有頻率。求出模型A1~模型D1的懸架偏頻和簧載質(zhì)量加速度與輪胎動載荷的頻率響應(yīng)曲線,如表7和圖6所示。表7結(jié)果表明,懸架橡膠元件的剛度特性主要影響等效二自由度模型的簧載質(zhì)量固有頻率,而對非簧載固有頻率影響不大;圖6結(jié)果表明,懸架橡膠元件的剛度特性主要影響等效二自由度模型在簧載質(zhì)量固有頻率附近簧載質(zhì)量加速度和輪胎動載荷的響應(yīng)特性。
因此,下文進行基于等效二自由度模型的參考模型滑模控制研究時,僅采用等效二自由度模型D1的參數(shù)辨識值和名義值。
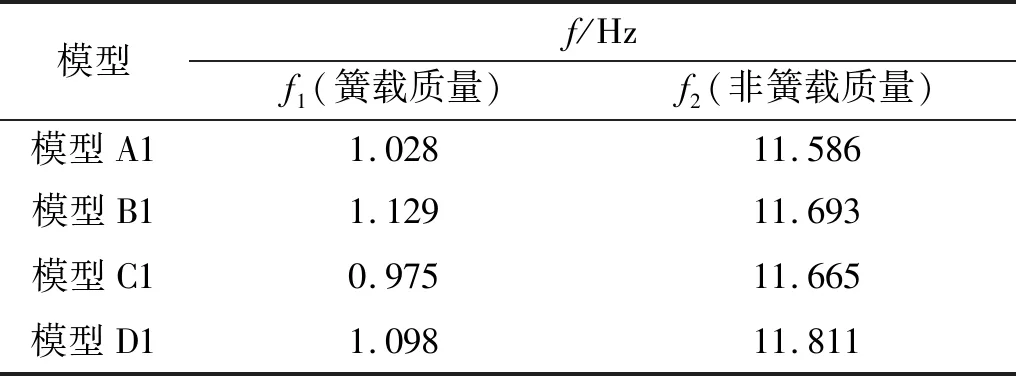
表7 模型A1~模型D1的懸架偏頻Tab.7 Nature frequency of model A1—modele D1
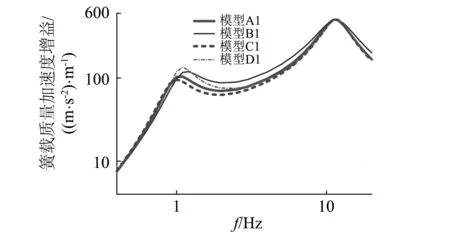
(a)簧載質(zhì)量加速度
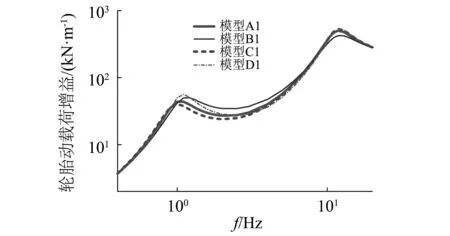
(b)輪胎動載荷圖6 模型A1~模型D1的頻率響應(yīng)曲線對比Fig.6 Dynamic responses of model A1—model D1 in frequency domain
3 基于等效二自由度模型的參考模型滑模控制
3.1 基于參考模型的滑模控制算法
基于參考模型的滑模控制的基本原理是采用適當?shù)目刂屏硎苟杂啥瓤刂颇P秃蛥⒖寄P偷倪\動保持一致,優(yōu)點在于參考模型不必是一個實際的系統(tǒng),可以是任何理想的數(shù)學(xué)模型。
本文設(shè)計的二自由度控制模型控制力由一種基于參考模型的滑模變結(jié)構(gòu)控制器產(chǎn)生,如圖7所示。由圖7可知,二自由度控制模型只是在二自由度模型的基礎(chǔ)上,增加了簧載質(zhì)量和非簧載質(zhì)量之間的控制力;參考模型在二自由度模型的基礎(chǔ)上在簧載質(zhì)量與理想固定端之間增加了一個阻尼系數(shù)csky,構(gòu)造理想的天棚控制,以衰減簧載質(zhì)量的振動,從而獲得良好的行駛平順性。
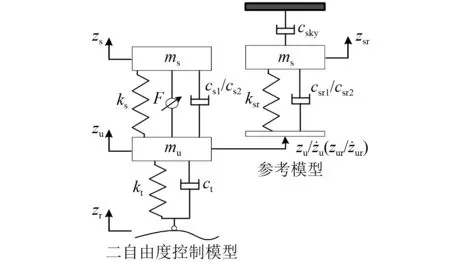
圖7 基于參考模型的二自由度控制模型Fig.7 2DOFs control model based on the reference model
由于實際路面信號較難測量,參考模型不考慮二自由度模型的輪胎剛度和輪胎阻尼,以二自由度控制模型的非簧載質(zhì)量的位移和速度信號作為參考模型的輸入,使二自由度控制模型的簧載質(zhì)量跟蹤參考模型的簧載質(zhì)量運動。
二自由度控制模型的運動微分方程為
(14)
式(14)中的阻尼系數(shù)cs定義為
(15)
參考模型運動微分方程為
(16)
式(16)中的阻尼系數(shù)csr定義為
(17)
定義二自由度控制模型與參考模型中簧載質(zhì)量位移差和速度差為誤差矢量e
(18)
對誤差矢量進行滑模控制,建立滑模面函數(shù)[17]
s=Ce
(19)
C=[h,1]
(20)
式中:h為大于0的常數(shù)。
(21)
(22)
在滿足廣義滑模條件的前提下,采用指數(shù)趨近率來改善滑動模態(tài)的運動品質(zhì),可得

(23)
式中:K為指數(shù)趨近率參數(shù),適當調(diào)大K值能保證快速到達滑模切換面。
將式(23)代替式(21),即可得到二自由度控制模型的主動控制力
F=Fdeq+msKs
(24)
3.2 參考模型的參數(shù)對滑模控制效果的影響分析
第3節(jié)的計算結(jié)果已經(jīng)表明,等效二自由度模型D1中的剛度和阻尼系數(shù)的數(shù)值和名義值的差異相差較大,而質(zhì)量參數(shù)的數(shù)值與名義值的差異可以忽略不計。因此,當參考模型中采用的剛度和阻尼系數(shù)的數(shù)值與二自由度控制模型不一致時,將影響二自由度控制模型的控制效果。根據(jù)式(14)和式(24),搭建Matlab/Simulink仿真框圖,在式(12)的位移階躍輸入下,求解出簧載質(zhì)量和控制力的響應(yīng)。為了下文敘述方便,對參考模型中的剛度和阻尼系數(shù)采用不同數(shù)值時的二自由度控制模型進行定義,如表8所示。
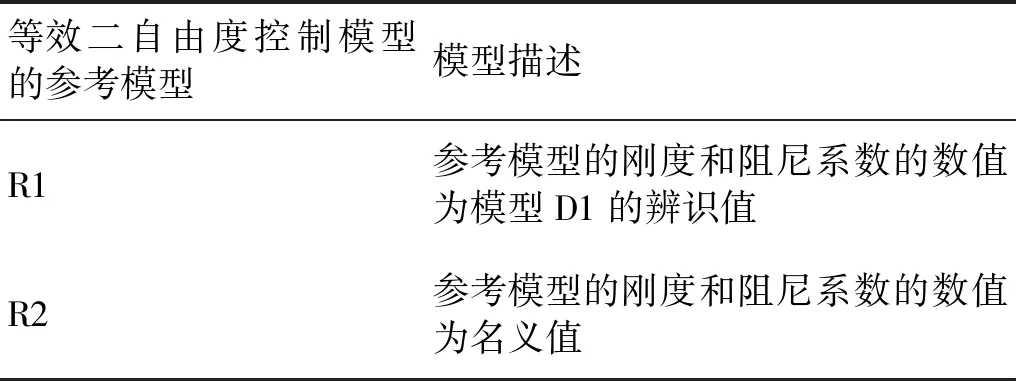
表8 等效二自由度控制模型的參考模型定義Tab.8 Definitions of reference model based on the 2DOFs control model
參考模型采用的理想天棚控制,可以抑制簧載質(zhì)量振動,但會加劇非簧載質(zhì)量的振動。因此,參考模型中的理想天棚阻尼系數(shù)csky的數(shù)值需要綜合考慮簧載質(zhì)量和非簧載質(zhì)量的振動控制目標,進行優(yōu)化得到。由于本文只研究參考模型參數(shù)采用不同數(shù)值時,二自由度控制模型的簧載質(zhì)量加速度和控制力的響應(yīng)情況,因此,天棚阻尼系數(shù)csky只需取一個適中的數(shù)值。
仿真時,二自由度控制模型的質(zhì)量、剛度和阻尼系數(shù)采用模型D1的辨識值,參考模型的參數(shù)數(shù)值根據(jù)表8設(shè)置,h,K和csky分別為10,50和3 N·s/mm。
基于參考模型R1和R2的滑模控制效果見圖8。由圖8可知,采用基于參考模型的滑模控制可以很好地衰減簧載質(zhì)量的振動。但是與基于參考模型R1相比,基于參考模型R2的二自由度控制模型的簧載質(zhì)量加速度響應(yīng)較大,并且需要提供更大的控制力。因此,采用基于參考模型的滑模控制時,參考模型的剛度和阻尼系數(shù)的數(shù)值應(yīng)盡可能地與二自由度控制模型中相關(guān)參數(shù)的數(shù)值一致。
4 參考模型參數(shù)對滑模控制效果的影響的試驗驗證
參考模型的剛度和阻尼系數(shù)對二自由度控制模型的控制效果的影響情況,通過Quanser-Active Suspension試驗設(shè)備[18]進行驗證。試驗設(shè)備中的二自由度控制模型如圖9所示,主要由簧載質(zhì)量、非簧載質(zhì)量、懸架彈簧、輪胎彈簧和兩個電機(3,6)組成。
位于底部的電機(6)產(chǎn)生位移輸入,中部的電機(3)產(chǎn)生控制力,每個電機都帶有轉(zhuǎn)角位移編碼器,測量輸入位移和懸架相對位移。另外,還有一個編碼器和加速度傳感器固定在簧載質(zhì)量上,分別測量簧載質(zhì)量的位移和加速度。該二自由度控制模型沒有安裝阻尼裝置,將運動過程中直線軸承與導(dǎo)軌之間摩擦力以阻尼力代替,其阻尼系數(shù)及模型的參數(shù)如表9所示。試驗時,參考模型中的天棚阻尼系數(shù)csky取值為30 N·s/m,二自由度控制模型的路面輸入為式(12)。
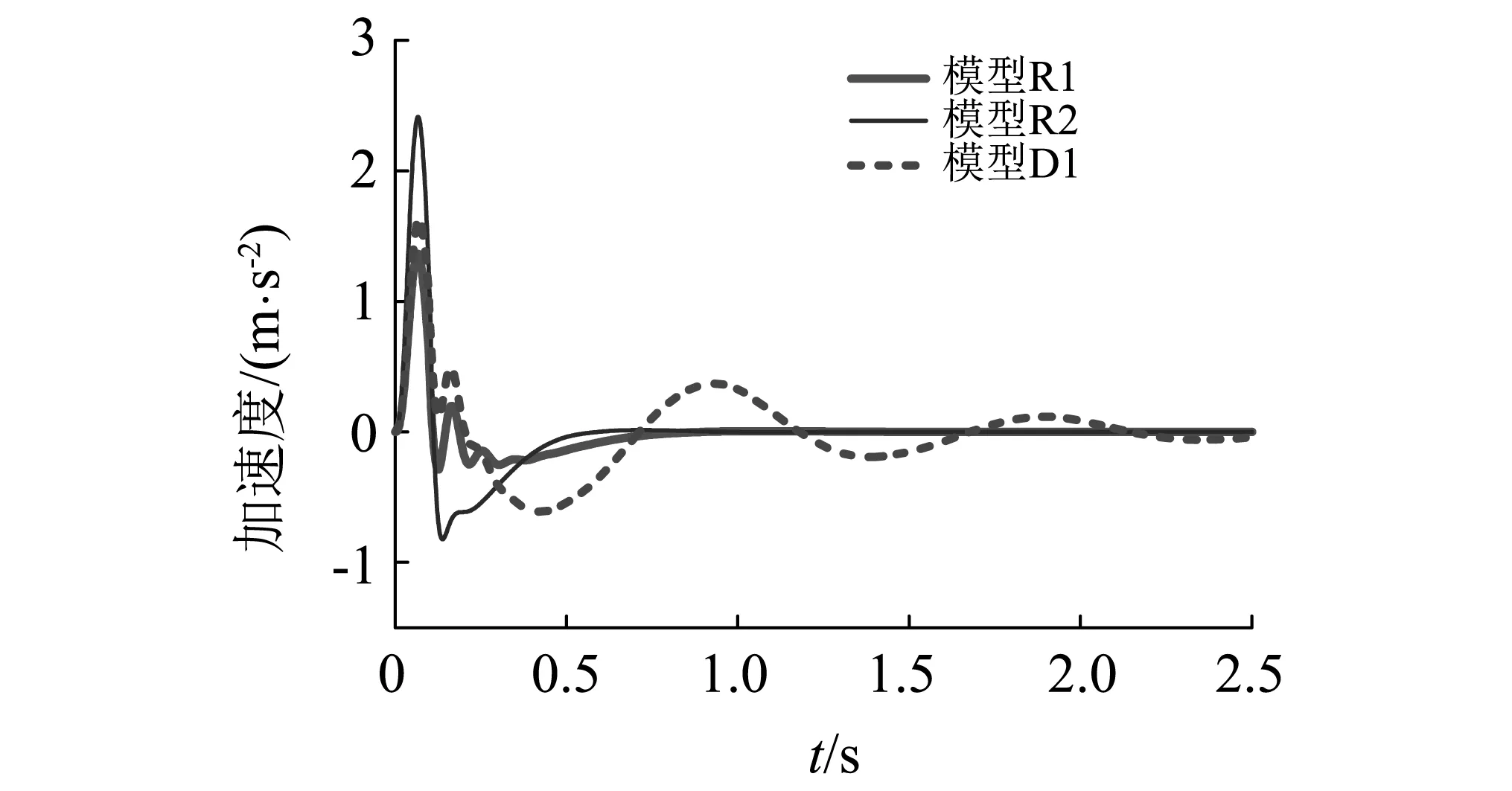
(a)簧載質(zhì)量加速度
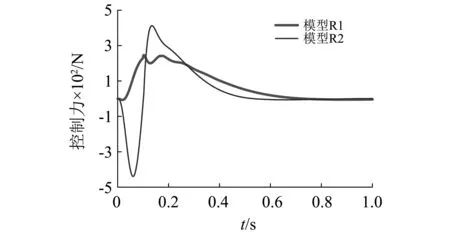
(b)控制力圖8 采用參考模型R1和R2時,二自由度控制模型的簧載質(zhì)量加速度和控制力的響應(yīng)Fig.8 Sprung mass acceleration and control force of the 2DOFs control model under reference model R1 and R2

1-簧載質(zhì)量;2-非簧載質(zhì)量;3-控制電機;4-懸架彈簧;5-輪胎彈簧;6-位移輸入電機圖9 二自由度控制模型實物圖Fig.9 Diagram of the 2DOFs control model
為了證明第4.2節(jié)中參考模型參數(shù)與二自由度控制模型不一致時,滑模控制的效果會變差的仿真結(jié)論。根據(jù)表10的方案分別進行試驗,試驗得到二自由度控制模型的簧載質(zhì)量加速度和控制力的響應(yīng),如圖10所示。
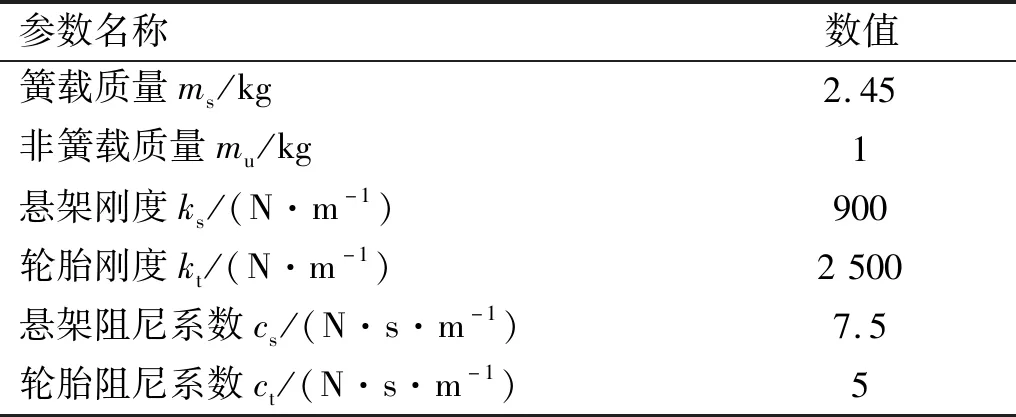
表9 二自由度控制模型參數(shù)Tab.9 Parameters of the 2DOFs control model
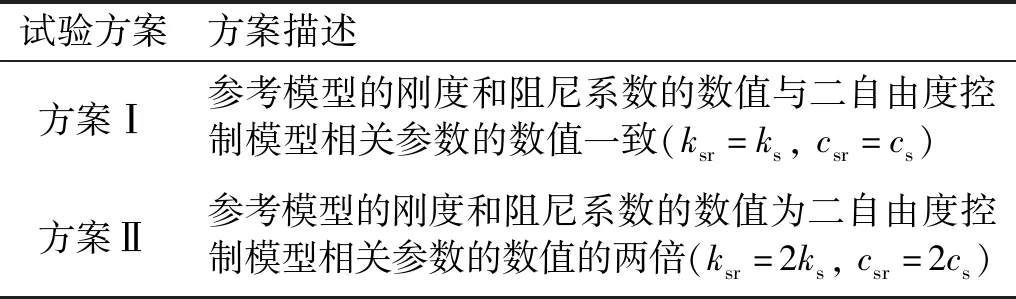
表10 二自由度控制模型試驗方案Tab.10 Measured schemes of the 2DOFs control model
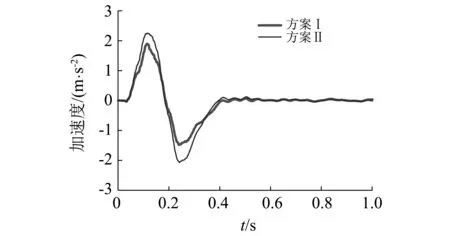
(a)簧載質(zhì)量加速度試驗值
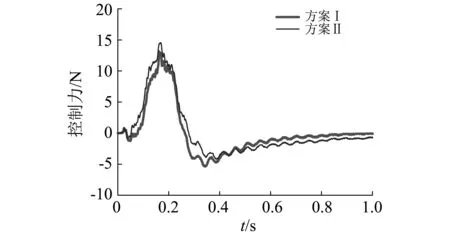
(b)控制力試驗值圖10 試驗方案Ⅰ和方案Ⅱ得到的二自由度控制模型的簧載質(zhì)量加速度和控制力的響應(yīng)Fig.10 Sprung mass acceleration and control force of the 2DOFs control model under measuring schemes Ⅰ and Ⅱ
試驗方案Ⅱ得到二自由度懸架模型的簧載質(zhì)量加速度和控制力的響應(yīng)幅值比試驗方案Ⅰ得到的響應(yīng)幅值大。因此,證明了在基于參考模型的滑模控制中,當參考模型的剛度和阻尼系數(shù)與二自由度控制模型的參數(shù)一致時,可以獲得更好的控制效果的仿真結(jié)論。
5 結(jié) 論
(1)在ADAMS中建立了基于雙橫臂懸架的1/4汽車模型,并根據(jù)其簧載質(zhì)量和非簧載質(zhì)量的動力學(xué)響應(yīng),辨識出等效二自由度模型的質(zhì)量、剛度和阻尼系數(shù)。等效二自由度模型辨識結(jié)果中的剛度和阻尼系數(shù)的數(shù)值和1/4汽車模型中相關(guān)參數(shù)的名義值有較大的差異。
(2)橡膠元件的剛度特性主要影響等效二自由度模型辨識結(jié)果中的懸架剛度和阻尼系數(shù)。控制臂襯套的剛度特性會使懸架剛度加大,而減振器上端支撐的剛度特性會使懸架剛度減小;控制臂襯套的剛度特性對阻尼系數(shù)基本沒有影響,而減振器上端支撐的剛度特性將會減小阻尼系數(shù)。
(3)建立采用辨識參數(shù)的二自由度控制模型,構(gòu)造基于參考模型的滑模控制器產(chǎn)生控制力。試驗和計算結(jié)果都表明,與采用名義值相比,參考模型的剛度和阻尼系數(shù)采用辨識值時,等效二自由度控制模型可以獲得更好的控制效果。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·八年級物理人教版(2021年12期)2021-12-31 03:23:08
中學(xué)生數(shù)理化·中考版(2020年10期)2020-11-27 01:59:48
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年2期)2019-08-23 08:12:08
產(chǎn)品可靠性報告(2017年7期)2017-09-05 09:49:12
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
汽車觀察(2016年3期)2016-02-28 13:16:26
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03