支持無線充電的智能循線小車系統的設計分析
2019-09-17 07:59:28徐華鋒陸靖雯高依然
青年與社會 2019年20期
徐華鋒 陸靖雯 高依然

摘 要:通過實驗,設計了一種基于無線充電的智能小車系統。該系統采用無線充電模塊和鋰電池為汽車提供安全、快速、有效的電能供應。小車循線模塊主要是基于一個四路紅外傳感器,利用物質的對光的反射和吸收性質,當紅外線發射到黑線上時會被黑線吸收掉,發射到其他的顏色的材料上會有反射到紅外的接受管上。通過安裝在前端和底板的紅外傳感器采集的路徑信息,讓四輪驅動減速電機控制小車行駛,實現小車的巡線功能。
關鍵詞:智能小車;紅外循線;無線充電
一、研制背景及意義
新能源汽車早已被列入國務院發布的《“十三五”國家科技創新規劃》,它的發展一直是國家實現可持續發展的戰略要求,是緩解現如今日漸短缺的石油資源和環境污染的現狀的良好手段。對于電動汽車走向市場的挑戰, 其能源的可持續供應即電動汽車充電技術是制約電動汽車發展的關鍵。對于電動汽車面臨的市場挑戰,可持續的能源供應,即電動汽車充電技術,是制約電動汽車發展的關鍵。而無線充電技術作為一種新型的新能源汽車充電方式,具有安全、可靠、靈活等優點,具有著良好的市場應用前景,它的高效率實現為電動汽車的發展帶來了新的機遇。因此,本設計以無線充電系統高效穩定供電為研究目的,制作出一件支持無線充電的智能尋軌小車模型。
二、硬件系統及其控制
(一)控制中心
小車控制系統以STM32F103C8T6為主控芯片,采用四通道紅外傳感器采集道路信息,充分利用其高速計算處理能力,實現循線功能。STM32F103C8T6開發板是一款常用的集計算、控制、存儲和輸出于一身的計算機硬件系統。其程序存儲器容量是64KB,強大的芯片資源和IO配置比起51單片機、Arduino更具挑戰性。
(二)電機驅動
小車由四輪驅動四路直流減速電機驅動。采用TB6612FNG驅動芯片控制驅動4臺直流減速電機。通過控制驅動芯片的AIN1,AIN2,BIN1,BIN2,PWMA,PWMB的電平高低來控制電機的正轉,反轉,停止。電機控制原理見表1:
(三)循線模塊
小車循線模塊是基于紅外傳感器,其采用的是四路紅外傳感器分別連接在STM32主控板上的A1,A2,A3,A4口上。其中中間兩路循線是一直在黑線上,小車會直行,當任意一個出來,則小車會自動糾正,如果最外面的檢測到黑線,則小車以更大速度糾正到正確黑線上面。其程序編寫原理如圖1所示。
(四)無線充電模塊
其無線充電模塊設計是利用近場感應,也就是電感耦合,是由震蕩電路產生交流信號,經波形電路處理后,最后由功率放大器將波形放大,形成交流電,發射端線圈以交流電推動而產生交流電磁場,從而將能量從發射端轉移到接收端。通過橋式電路整流和濾波電容濾波成直流電給小車內部三節18650鋰電池充電,當無線充電發射器停止充電時,使用繼電器自動控制開關,經DC-DC穩壓升壓變換給小車供電,從而實現無線充電電動小車前進。無線充電發射模塊采用XKT-801芯片,接收模塊采用XKT630芯片。這兩個芯片是芯科泰公司開發的高頻諧振大功率集成電路。主要用于大功率、長距離系列產品。它們負責處理無線能量的傳輸功能。利用電磁能量轉換原理實現能量轉換和對電路的實時監控,為各種電池實現快速充電。
(五)機械部分
機械部分設計如圖1所示,采用4WD四驅裝置為小車的主體部分,采用多孔的鋁合金板材搭成小車機械框架,tt減速電機作為驅動,以及亞克力板輔助搭建。整個作品目前尺寸為260mm*190mm*140mm,以鋰電池為供電模塊,通過穩壓模塊轉換電壓給減速電機和四路循線模塊供電。設計時的注意事項:
(1)小車搭載的模塊較多:驅動板、四路循線、紅外感應器、3節18650鋰電池盒、4個TT減速電機、繼電器、DC-DC升壓穩流模塊、無線充電接受模塊。因此,采用多孔鋁合金平板作為小車的底板。
(2)無線充電線圈安裝在小車底部:采用16mm銅柱將100mm*100mm*2mm亞克力板固定在鋁合金底板下方,將線圈緊貼在亞克力板上。
(3)小車的驅動板采用自鎖開關配合繼電器,確保充電安全。利用無線充電模塊啟動繼電器控制了小車的供電電路,使其在小車充電時斷開小車的供電,讓小車更加安全穩定的充電。
三、工作原理及性能分析
(一)循線行駛測試
把小車放在帶黑線導軌的軌道上,打開小車的開關,讓小車自動循線行駛。測試結果顯示,在小車的直線運行過程中,小車會出現左右搖擺的現象,分析如下:
(1) 當小車的初始角度偏移越小,小車在運行中就越穩定。
(2)通過用PWM調速,結果顯示,小車的車速減小時,小車的穩定性提高。
(3)在小車檢測校正偏轉時,有兩種選擇:一是小車調節偏置側輪停止實現停滯偏轉;二是通過調整偏置輪的轉速以實現差速偏轉。方案二實現效果較好。
(二)無線充電測試
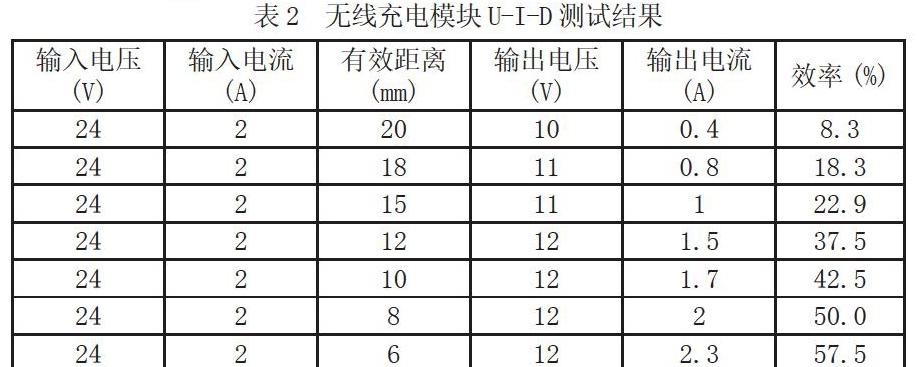
將發射模塊接入220V交流電源電源,經過變壓器、整流濾波后向發射電路輸入一個24V直流電壓,接收端的輸出接到負載儀,負載儀以恒流的方式輸出,調整耦合線圈的有效距離,測量輸出電壓與電流的變化。
測試結果顯示,無線充電模塊在耦合線圈之間的有效距離在小于10mm時,充電效率可達40%以上。因此在設計小車時,將耦合線圈的有效距離設置在8mm。
(三)創新點及應用
(1)適用于不同類型智能碼頭,智能物流、智能倉庫等。
(2)自動化程度高:可通過PC上位機可實現實時集中式控制,操作和控制簡便,容易地使用它。
(3)其無線充電模塊去除了插座和電源線的約束,讓小車的充電更加方便,同時取締了充電接口,解決市場上各類充電器接口分歧,實現不同的類型的多種產品共享充電的功能。
隨著智能終端、智能物流、智能倉庫的發展,AGV智能汽車早已成為現代物流系統的關鍵設備,它的設計與發展對于提高智能物流的自動化程度和企業生產效率有著十分重要的意義,其無線充電高效率的實現在AGV小車的節能措施實施改進,因此應用前景很廣。
參考文獻
[1] 王換民.電動汽車無線充電補償網絡輸出特性研究[D].西安理工大學,2017.
[2] 史永剛,蘭寧,魏家選,王威龍,祁雷超.基于鋰電池的無線充電模塊的設計[J].科學技術創新,2019.
[3] 朱云陽,郝鵬,劉維亭.基于電磁諧振式無線充電線圈實驗研究[J].信息技術,2015.
[4] 閆書燕.基于單片機控制AGV小車設計及應用[J].商洛學院學報,2018.
[5] 鄭茂江.淺談循跡智能小車設計與應用[J].山東工業技術,2019.
[6] 申扣明,楊國平.基于單片機技術的自動循跡避障尋光智能小車系統設計[J].自動化應用,2018.
[7] 勒國慶,班乾乾.基于STM32 的智能小車設計[J].福建電腦,2018.
作者簡介:徐華鋒(1999.10- ),男,安徽安慶人,北京市昌平區華北電力大學,本科,研究方向:熱能工程;陸靖雯(1999.04- ),女,廣西南寧人,北京市昌平區華北電力大學,本科,研究方向:智能電網信息工程;高依然(1998.05- ),女,河北滄州人,北京市昌平區華北電力大學,本科,研究方向:工程管理。
