基于隨機采樣一致性的規則棒料位姿識別*
2019-09-11 02:25:10吳慶華朱思斯
傳感器與微系統 2019年9期
關鍵詞:模型
吳慶華, 朱思斯, 周 陽, 萬 偲, 何 濤
(1.湖北工業大學 機械工程學院,湖北 武漢 430068;2.現代制造質量工程湖北省重點實驗室,湖北 武漢 430068)
0 引 言
工業生產中,引導機械手對規則堆放棒料實施抓取的過程中,準確識別出單根棒料的位姿信息是關鍵環節。如何從多根棒料中分割出單根棒料并準確識別其位姿,對于機械手自動抓取環節具有一定的研究意義。傳統的二維視覺檢測技術[1,2],占用空間大、易受環境光影響、識別準確性不高。因而提出基于三維點云分割的棒料位姿識別方法,充分利用規則堆放棒料點云的冗余數據,對棒料點云進行分析處理得到每根棒料的準確空間抓取位姿。
點云分割算法主要有區域增長算法、聚類算法、霍夫變換、隨機采樣一致性算法等[3,4]。區域增長算法是選取目標物體內一個小的種子區域,根據一定的準則在種子處進行鄰域的擴展,直到停止生長,其性能對種子和區域增長策略的選取要求較高[5]。聚類算法是根據點鄰域的點云精確計算該點的特征空間,該算法過于復雜、速度較慢。霍夫變換是在構建的點云高斯球中分別執行2D霍夫變換和3D霍夫變換。這種順序分解計算上效率低,而且對屬于空間不同軸的圓柱特征的點易被分割成同一個類[6]。隨機采樣一致性算法是一種經典的模型擬合算法,在異常點存在的情況下,依然可以得到比較理想的結果[7~9]。因此,采用了基于隨機采樣一致性的分割方法,可從規則堆放的棒料點云中分割出單根棒料的位姿信息。
1 棒料位姿識別原理
圖1(a)為根據三角測量原理設計的位姿識別系統,其中由線結構光三維掃描儀獲取規則堆放棒料的點云;圖1(b)為掃描系統實物圖;圖1(c)為獲得的棒料點云。根據圖1(c)中棒料點云的分布特點,設計了規則堆放棒料位姿識別方法流程。先對獲得的規則堆放棒料點云進行預處理,得到頂層棒料的點云,然后利用隨機采樣一致性(random sample consensus,RANSAC)算法將頂層棒料分割成單根棒料,再提取y值最大和最小的棒料點云,擬合出單根棒料的兩個底面的圓心坐標,從而計算得到棒料的位姿。
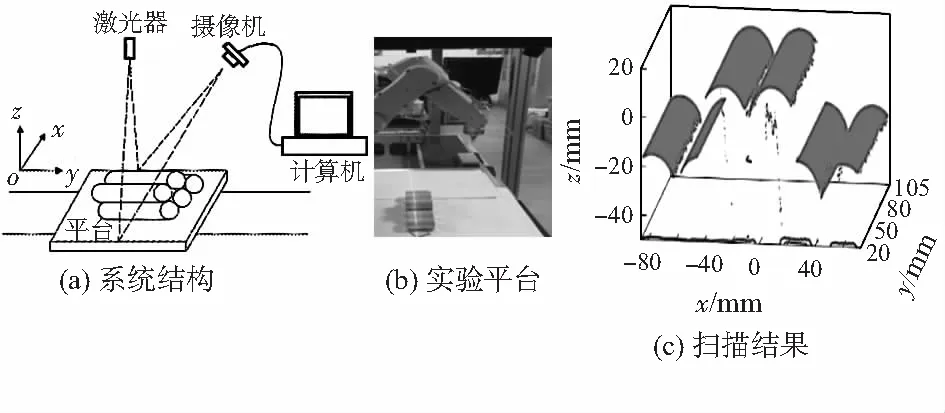
圖1 棒料位姿識別系統原理
2 基于RANSAC算法的位姿識別
2.1 點云數據預處理
由于環境以及被測對象表面光澤度等因素的影響,掃描出的圓柱體棒料點云不可避免地存在一些噪聲點。根據圖1(a)系統結構示意圖,線激光沿y方向掃描,獲得的點云如圖1(c)所示,其中棒料點云沿z軸方向規律累積分布,且在x軸和y軸方向分布均處于有限范圍內。根據棒料點云的分布特點,處于頂層的棒料,其z坐標較大,而接近于底層的棒料,其z坐標較小。通過對棒料點云基于z維度進行濾波處理,可以消除環境噪聲點和非頂層棒料點云的影響,除去不在頂層棒料點云范圍內的點云。式(1)為z向濾波的定義式,定義z坐標屬于一定范圍內的點云為頂層棒料點云
f(x,y,z)={(x,y,z)|z∈(z1,z2)}
(1)
2.2 圓柱體點云分割
在濾除非頂層棒料點云后,再將頂層棒料分割成單根的棒料來獲取其位姿信息。
棒料的空間柱面模型如圖2所示,進行RANSAC分割時輸入適應于局內點的圓柱體模型的數學方程為
r2=(x-a)2+(y-b)2+(z-c)2-
(2)
式中 (a,b,c)為圓柱體軸線L上一點,(d,e,f)為圓柱體軸線L的方向向量,r為圓柱半徑,(x,y,z)為圓柱面上任意一點。
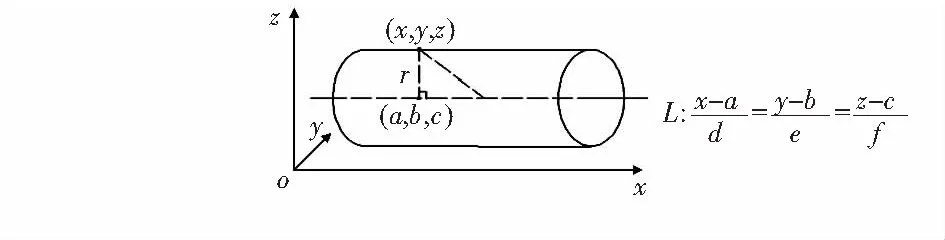
圖2 空間柱面模型
定義滿足圓柱體模型的點為局內點,其他點稱為局外點;那么,理論上局內點到圓柱面模型表面的距離為零。所以,基于RANSAC的圓柱體分割算法具體步驟:
1)任意抽選一些點,計算出上述圓柱體模型中a,b,c,d,e,f,r的初始值;

4)如圖3所示,取距離閾值t=2σ,當di>t時,此點被認為是局外點,刪除;反之,則為局內點,保留,并統計局內點的數目S。
5)重復步驟(1)~步驟(4),迭代k次,比較并選取含有局內點數目S最多的局內點集;
6)采用特征值法對局內點數量S最多的局內點集進行重新估計得到最終的圓柱模型參數。
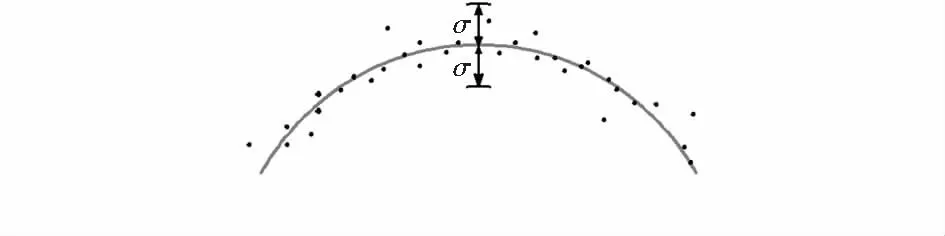
圖3 部分點云平視
3 棒料位姿識別實驗
3.1 棒料仿真位姿識別
以圖1(b)中直徑為35.00 mm,長度為80.00 mm的規則堆積空心鋁棒為仿真對象使用Solidworks仿真出如圖4(a)所示與實際棒料堆放情況相同的10根圓柱模型,在軟件中識別出所有圓柱的位置和姿態;同時,將圖4(a)中的圓柱模型轉換成如圖4(b)所示的圓柱點云模型,并向該點云模型中添加一些噪聲得到如圖4(c)所示含噪聲的圓柱點云模型,使用本文提出的棒料位姿識別方法識別出圖4(c)中所有圓柱的位置和姿態。

圖4 棒料仿真位姿識別
比較表1中分別通過這兩種方法得到2組圓柱位姿,在有噪聲的情況下,使用提出的方法也能較好識別出的圓柱位置和姿態,x值最大誤差為0.014 mm,z值最大誤差為0.028 mm。由此驗證了所提出的棒料位姿識別方法的正確性和穩健性。
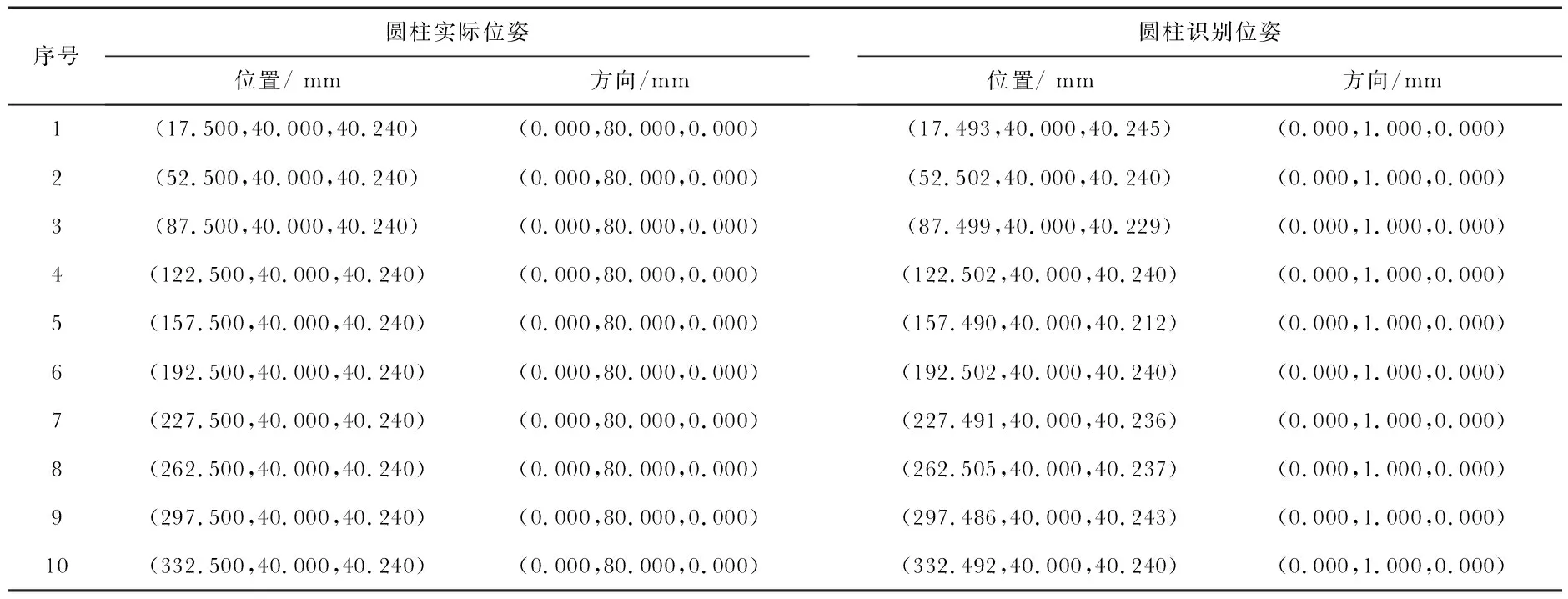
表1 圓柱模型的位姿
3.2 迭代次數k和閾值t對識別方法的影響
通過線結構光三維掃描儀采集如圖1(b)中,直徑35.00 mm,長度80.00 mm的規則堆放空心鋁棒的初始點云個數為221251,掃描得到如圖1(c)所示的棒料點云。設置z軸方向的濾波范圍為(0.00,20.00)mm,保留范圍內的點云,濾波后得到如圖5所示的頂層棒料點云,點云個數為70 666。

圖5 濾波結果
采用RANSAC算法對頂層棒料進行分割。在RANSAC算法中,參數的選擇是影響分割精度的重要因素,所以在分割之前先設定參數。對迭代次數k和距離閾值t取不同的值,對同一根棒料點云進行多次分割分別得到如圖6所示的結果。
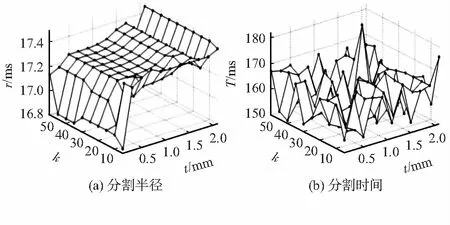
圖6 不同參數下的分割半徑和時間
理論上,距離閾值t越小,分割的結果越好;迭代次數k越大,耗時越長。但從圖6(a)可以看出,在迭代次數k≥20時,當距離閾值t<0.5 mm,分割出來的圓柱半徑誤差較大;當距離閾值t∈(0.5,1.2)mm時,分割半徑則處在一個穩定的范圍內r∈(17.20,17.40)mm;當距離閾值t>1.2 mm時,分割的圓柱半徑不穩定。在圖6(b)中,迭代次數k和距離閾值t的變化對分割時間T并無明顯的影響,而處于一個相對穩定的時間區間內,每次分割所消耗的時間T∈(150,170)ms。所以,設定迭代次數k為大于等于20的值,距離閾值t為(0.5,1.2)mm區間內的值。
3.3 位姿識別數據分析
取迭代次數k=20,距離閾值t=0.7,通過RANSAC算法分割得到如圖7所示的單根棒料點云,其點云個數為35027,消耗151 ms,并得到對應圓柱體模型的7個參數,即a=7.841,b=21.539,c=-4.035,d=0.002,e=1.000,f=-0.008,r=17.25。
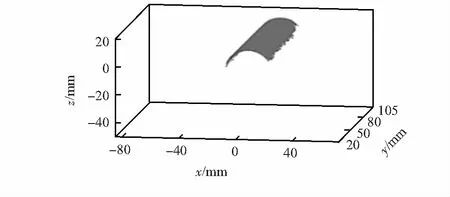
圖7 分割結果
再將這7個參數代入圓柱體模型的數學方程(2),擬合得到完整圓柱體如圖8(a)所示。提取圖7中y值最大和最小的棒料點云,分別擬合出棒料的2個底面,得到如圖8(b)所示的兩個底面擬合圓,同時得到棒料兩個底面擬合圓的圓心坐標(7.850,23.500,-4.092)mm和(7.961,103.500,-4.624)mm,從而確定了圖8(a)中的棒料軸心線;計算這兩個底面圓心的中點得到如圖8(a)所示棒料抓取位置(7.906,63.500,-4.358)mm。
使用上述方法,對掃描出的所有的棒料進行位姿識別,得到如表2所示的6個棒料位姿和棒料半徑。從表2中可以看出所有掃描棒料的位置和姿態都能較好的識別;分割出的棒料半徑的平均誤差為0.30 mm,最大誤差為0.47 mm;最小誤差為0.12 mm。
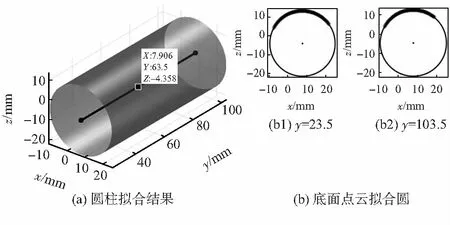
圖8 底面點云擬合圓擬合結果

mm
4 結 論
為引導機械手自動抓取規則堆放棒料,利用線結構光三維掃描儀采集規則堆放棒料的三維點云,通過z向濾波剔除非頂層棒料的點云,采用RANSAC算法分割出每一根頂層棒料,從而實現棒料的位姿識別。仿真實驗驗證了棒料位姿識別方法的正確性;實際棒料的位姿識別結果表明:當迭代次數k=20,距離閾值t=0.7時,分割結果較穩定,分割時間約160 ms左右;分割出的棒料半徑的最大誤差為0.47 mm。該方法對于機械零件的位姿識別,具有一定參考價值。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
