微圓頂結構柔性觸覺傳感器接觸模型與仿真研究
2019-09-11 02:25:08聶操
傳感器與微系統 2019年9期
關鍵詞:結構
聶 操
(合肥工業大學 電子科學與應用物理學院,安徽 合肥 230009)
0 引 言
隨著機器人技術的不斷發展,智能機器人在人們生產生活中發揮著重要作用,人機交互日益頻繁,具備觸覺感知功能是智能機器人的一個重要特征。機器人電子皮膚(e-skin)是由覆蓋在機器人表面大面積、柔性、具有觸覺感知和數據處理功能的傳感器陣列構成,是僅次于機器人視覺獲取環境信息的重要感知形式[1~4]。具備觸覺感知的機器人柔性電子皮膚是保障機器人與環境交互安全性、智能性、精準性,以及復雜動態環境下實現機器人與人之間的協同作業、對環境信息的精準、多模態感知的重要因素。
傳統硅基、金屬應變片式機器人觸覺傳感器在柔性、延展性及穿戴舒適性等方面存在一定的弊端,為模擬人體皮膚觸覺感知功能,在外形結構及感知功能方面,設計具備柔性、可拉伸性、高靈敏度以及可大面積穿戴等特點的觸覺傳感器成為機器人柔性電子皮膚的研究熱點。柔性觸覺傳感器可分為電阻式、壓電式、光電式和電容式等幾類[5~7]。對于機器人電子皮膚觸覺傳感器而言,兼備高柔性、高彈性和高精度測量等特點是柔性觸覺傳感器設計所面臨的主要難題。
觸覺傳感器中設計微結構是提升其靈敏度的常用方法之一,常見微結構有金字塔、觸須狀、凹凸狀等[8~12]。Park J等人[13]以碳納米管填充聚二甲基硅氧烷(poly dimethyl siloxane,PDMS)為敏感材料,制備具有圓頂陣列結構的高靈敏度觸覺傳感器,可實現對法向力、切向力、彎曲以及扭力等檢測。高麗大學Choong C L等人[14]在金字塔微結構柔性基體表面包裹一層導電聚合物,利用在觸覺力作用下,金字塔微結構與電極間接觸電阻和體電阻發生變化,以實現高靈敏度觸覺感知。研發具有柔性、高靈敏度觸覺感知功能的電容式觸覺傳感器仍是機器人柔性電子皮膚研究中所面臨的問題之一。
本文依據壓阻理論和接觸力學相關理論,分析微圓頂結構參數對柔性觸覺傳感器壓敏特性的影響,通過數學接觸模型和ANSYS有限元仿真論述微圓頂結構有利于提升柔性觸覺傳感器靈敏度,對高靈敏度柔性觸覺傳感器設計具有重要意義。
1 微圓頂結構與觸覺感知機理
微圓頂結構柔性觸覺傳感器力覺敏感單元結構示意圖如圖1(a)所示,選擇碳納米管/炭黑/硅橡膠導電復合材料制備壓敏單元,上下兩微圓頂結構柔性壓敏單元相互接觸。圖1(b)為微圓頂結構柔性觸覺傳感器觸覺感知機理示意圖,在外力作用下,上下兩微圓頂受力發生壓縮形變,其中,碳納米管—碳納米管、炭黑—炭黑以及碳納米管—炭黑導電相所形成有效導電網絡(通路)在硅橡膠母體中變化規律和微圓頂接觸面的變化是構成其拉伸應變敏感的主要機制。
碳納米管/炭黑/硅橡膠力敏材料中,炭黑與碳納米管和硅橡膠高分子相互作用,其協同補強效應可形成類似“葡萄串”結構且具備良好電學與力學性能的三維導電網絡[15~17]。依據滲流理論和導電通路理論,當導電相含量達到滲流閾值時,碳納米管/炭黑兩相填料在硅橡膠基體中形成由“點—點”、“點—線”以及“線—線”組成類似“葡萄串”結構的三維導電網絡,兩相導電填料間協同導電網絡有助于提升導電復合材料的電學穩定性和機械重復性。微圓頂結構在外力作用下發生壓縮形變和接觸形變,從而引起導電相在柔性基體中有效導電通路發生變化,因此,研究微圓頂結構柔性觸覺傳感器在外力作用下的形變特點以及微圓頂結構幾何參數對壓阻特性的影響,對提升柔性觸覺傳感器靈敏度具有重要意義。
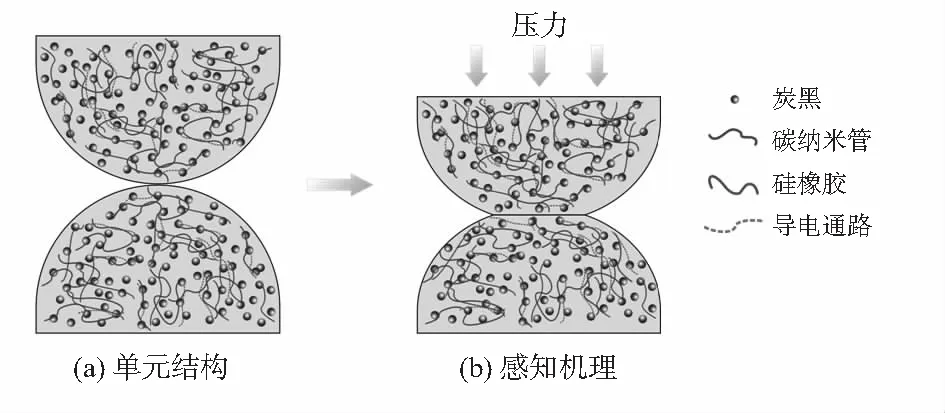
圖1 微圓頂結構柔性觸覺傳感器敏感機敏
2 接觸模型與ANSYS仿真分析
2.1 接觸模型分析


圖2 微圓頂結構接觸模型
則A,B兩點間的距離為
(1)
當微圓頂接觸面在法向力作用下相互作用時會產生圓形接觸面,將距離接觸面較遠的兩點因擠壓而相互接近的距離記為η,若A,B兩點在擠壓時重合,則η-(d1+d2)表示A,B在重合后沿接觸面法線方向繼續產生的位移,A,B各自繼續發生的位移分別記作,ω1和ω2,可得
(2)

=(k1+k2)?qdsdφ
(3)

(4)

圖3 微圓頂結構受壓力作用時接觸面積
(5)
r取不同值時,若上式均能滿足,則
(6)
q0/l與半球體積的乘積等于總壓力F,則
(7)
最大壓力
(8)
將式(2)和式(8)代入式(6)可得
(9)
上式表示了結合粗半徑與外加壓力之間的函數關系,通過幾何不等式變換,可以看出,對于微圓頂結構柔性觸覺傳感器(R1+R2一定),上下微圓頂曲率半徑保持對稱,即R1=R2有利于提升柔性觸覺傳感器的靈敏度。此外,相對于任意形狀的曲面(改變曲率半徑R),半球型微結構有利于接觸半徑l隨作用力F的變化保持較好的線性度。
2.2 ANSYS仿真分析
柔性觸覺傳感器微圓頂結構接觸屬于柔體—柔體接觸,受力作用時,微圓頂結構相互擠壓,產生圓形接觸面,屬于面—面接觸,且接觸的表面應包含不會滲透、可傳遞法向壓縮力和切向摩擦力、通常不可傳遞法向拉伸力等特征。ANSYS Workbench支持幾何模型導入,利用SolidWorks對微圓頂結構柔性觸覺傳感器進行建模,導入ANSYS Workbench后設置材料屬性、網格劃分、邊界條件設置及添加載荷,經后處理獲得微圓頂接觸信息。圖4為施加10 N法向力作用時微圓頂接觸形變仿真結果,可以看出,法向力作用下,微圓頂受力發生接觸形變(圖4(a))且接觸面為圓形(圖4(b)),形變由中心至外側遞減,與數學模型中的分析保持一致。
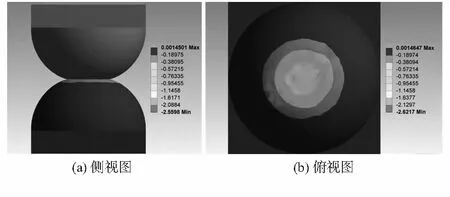
圖4 法向力作用下微圓頂接觸形變仿真結果
圖5為施加10 N法向力作用和4 N切向力作用時微圓頂接觸形變仿真結果,相較于單獨方向力作用,可以看出,切向力作用下,上微圓頂接觸面沿切向力方向發生偏移,接觸面積與法向力單獨作用時有所減小。微圓頂結構柔性觸覺傳感器不僅可實現法向力觸覺感知,也可以實現切向力觸覺感知,可用作智能機器人用柔性電子皮膚。
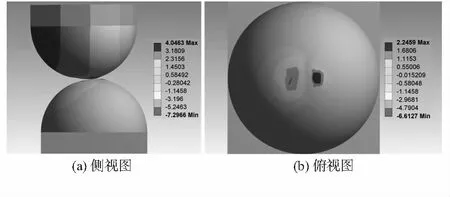
圖5 切向力作用下微圓頂接觸形變仿真結果
根據式(8)和式(9)可計算不同壓力下微圓頂結構最大接觸壓力與接觸半徑,通過ANSYS有限元仿真不同法向力作用下接觸半徑與最大接觸壓力,表1為不同壓力下接觸面最大壓力q0值與仿真值對比結果,表2為不同壓力下接觸面接觸半徑l值與仿真值對比結果。最大接觸力和接觸半徑的數值解析值與仿真值基本吻合,對比結果表明,文中微圓頂結構柔性觸覺傳感器接觸模型與ANSYS仿真結果保持了良好的一致性。
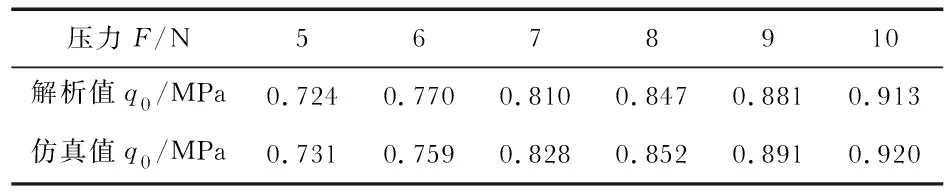
表1 不同壓力下接觸面最大壓力q0值與仿真值對比
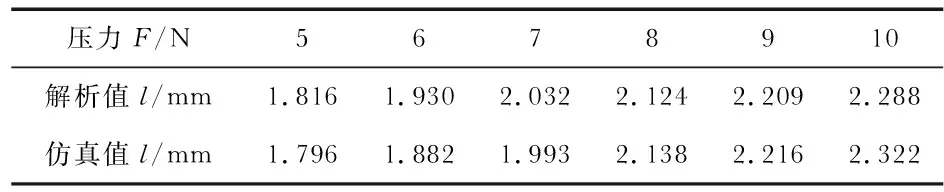
表2 不同壓力下接觸面接觸半徑l值與仿真值對比
前文分析了微圓頂結構柔性觸覺傳感器的敏感機理,為進一步驗證文中微圓頂結構柔性觸覺傳感器具有較高的靈敏度,碳納米管/炭黑/硅橡膠導電復合材料分別制備無微結構和微圓頂結構柔性觸覺敏感單元,測得其壓力—電阻曲線如圖6所示。
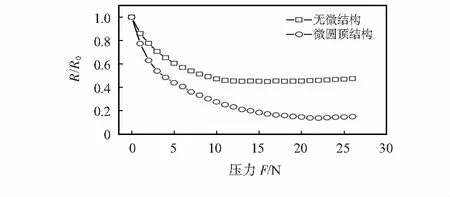
圖6 微圓頂結構柔性觸覺傳感器壓力—電阻曲線
可以看出,微圓頂柔性觸覺傳感器具有較高的觸覺感知靈敏度。
3 結 論
針對高靈敏度柔性觸覺傳感應用需求,依據壓阻理論和接觸力學,結合數值分析模型與ANSYS有限元分析闡述微圓頂結構幾何模型對柔性觸覺傳感器性能的影響。數值解析與仿真結果保持良好的一致性,驗證了文中提出微圓頂結構數學接觸模型的正確性,同時,論述了通過設計微圓頂結構有助于提升柔性觸覺傳感器的靈敏度和線性度,為高靈敏度柔性觸覺傳感器設計提供了設計方案。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50
