大跨度門式起重機運行偏斜問題分析
2019-09-10 08:02:07周靖
智能建筑與工程機械 2019年6期
關鍵詞:基本原理
摘? 要:門式起重機主要用于裝卸作業,包括室外貨場、散貨以及料場貨的裝卸,其作業范圍較大,可適用于多種作業場景。門式起重機整體結構為金屬結構,外觀形似門形框架,可以直接在地面軌道上移動,在實際使用過程中,受起重量、各系統性能、材料等多種因素影響。實踐證明大車在運行過程中易出現偏斜問題,進而影響起重機正常作業。本文結合實際案例,對大跨度門式起重機運行偏斜問題,研究導致其偏斜問題的原因,并探討了改善大跨度門式起重機運行偏斜問題的措施,為類似問題的解決提供參考。
關鍵詞:門式起重機;運行偏斜;基本原理;原因分析;糾偏
? 中圖分類號:U673? ?文獻標識碼:A? ? 文章編號:2096-6903(2019)05-0000-00
當前,隨著我國各行各業的發展,大跨度門式起重機應用范圍越來越廣,但是其運行偏斜問題長期得不到解決,這嚴重影響了作業效率。研究發現導致偏斜問題的原因比較復雜,跨度增大導致門式起重機剛性變小、大車傳動機構轉速誤差增大,由此造成運行偏斜等問題。目前大跨度門式起重機都安裝了自動糾偏系統,但是在實際運行過程中,需要減速糾偏,如果偏差大于起重機跨度的3/1000會導致起重機停止運行,嚴重影響作業效率。
1案例分析
某造船公司目前使用的是一臺160t、跨度70m的大跨度門式起重機,使用時間不足兩年,但是起重機大車行走出現嚴重偏斜,無法正常作業。該公司邀請門式起重機生產廠家、相關專家以及安裝單位共同對該問題進行研究,經現場論證,并未得出確切的結論,使得該問題長時間得不到解決。出現此問題后,門式起重機無法正常運行,因此導致企業生產停滯,造成了巨大的經濟損失。
經實地了解情況后,發現起重機在運行過程中,大車行走系統一側支腿隨著起重機的運行會與另一側支腿產生700mm的偏斜,其已遠遠超過起重機跨度的3/1000。同時剛性支腿南面的上下平衡梁扭曲不在同一垂直線上,起重機整體結構出現了幾何位置改變,因此導致起重機無法正常運行。
2門式起重機運行偏斜問題原因分析
導致門式起重機運行偏斜問題的原因比較復雜,筆者根據實踐經驗對此進行了總結,基本涵蓋八個方面。其一是門式起重機跨度變大導致起重機的剛性變小;其二是小車位置向柔性支腿或者剛性支腿一側偏斜,進而導致兩邊的負荷不均衡;其三是大車車輪存在加工誤差或者在長期運行過程中磨損較大,導致兩車車輪直徑出現差異;其四是剛性支腿與柔性支腿結構在啟動或者制動時不同步;其五是大車傳動機構的轉速存在誤差;其六是大車軌道安裝時,高低與平行度存在誤差,進而導致兩側支腿運行時阻力存在差異;其七是大車兩側支腿驅動電機的輸出特性存在一定的差異,包括轉矩、轉速等;其八是大車電傳動機構的安裝存在誤差。
在上述因素中,前兩項因素屬于不可抗拒因素,從門式起重機的設計、制造到安裝以及后續運行階段都無法人為的改善對于起重機剛性支腿以及柔性支腿的偏斜問題。其中后五項因素則屬于可控因素,在門式起重機制造以及安裝階段,可以通過提升加工制造的精度以及質量,提升安裝精度降低誤差,改善起重機運行偏斜的問題,但是依然無法有效保證門式起重機在運行過程中不出現偏斜問題[1]。
關于大跨度門式起重機運行偏斜的問題,很多人都對此進行了研究和試驗,采取了多種方法,比如裝置水平輪、增加車架整體水平剛性、潤滑軌道側面以及車輪邊緣、提升車輪的安裝精度、短時間斷電糾偏等,但是實際效果相對有限,并不能徹底解決問題。要有效改善這一問題,同時又要避免頻繁的人工操作以及暫停門式起重機運行,最佳方式仍是安裝自動糾偏系統。
3大跨度門式起重機自動糾偏系統
3.1自動糾偏的基本原理
大跨度門式起重機自動糾偏系統主要是利用控制器實時計算起重機運行偏斜量,并自動進行調整剛性支腿或者柔性支腿行進速度或者位置,從而使兩側支腿運行的偏斜量保持在合理范圍內,即門式起重機跨度的3/1000以內[2]。大跨度門式起重機自動糾偏系統的主要構成包括驅動裝置、測量傳感器主控制器、觸摸屏以及自動控制器。
其中測量傳感器由角度傳感器、絕對值編碼器、增量編碼、接近開關構成。自動控制器主要是依賴于PLC,一般小型的PLC基本就可以滿足控制需求,如果需要提高控制精度,可以考慮采用中型PLC。觸摸屏主要是顯示系統各項信息以及控制參數,觸摸屏需要與PLC連接,并將系統狀態信息以及控制參數儲存在PLC存儲器當中。驅動裝置一般意義上指的是電動,如果采用的是變頻控制則還需要增加變頻器。主控制器主要的作用是傳輸起重機運行的信息,然后有自動控制器作出控制動作,其可以選擇單獨控制,也可以選擇聯動控制,主要滿足傳遞信號的需求即可。
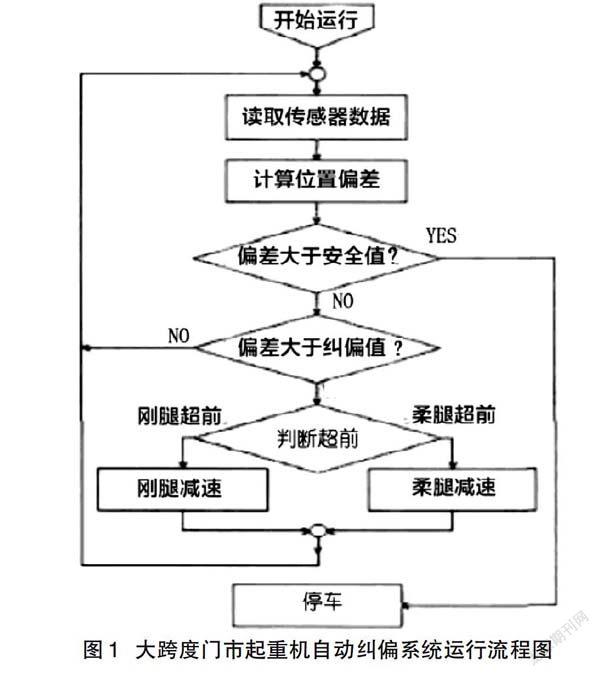
大跨度門式起重機自動糾偏系統在運行過程中首先有測量傳感器測量起重機剛性支腿與柔性支腿運行速度以及位置,并將數據傳輸至自動控制器,然后自動控制器自動計算當前其中運行的偏差是否需要進行糾正,如果需要糾正則計算出糾正的方向以及糾正程度,同時根據這些數據向驅動裝置傳輸控制命令,適當的加速或者減速,進而使起重機剛性支腿與柔性支腿運行的偏差控制在起重機跨度的3/1000之內[3]。自動糾偏系統運行流程圖如圖1所示。
圖1大跨度門市起重機自動糾偏系統運行流程圖
3.2自動糾偏方法
不同的糾偏系統采用的糾偏方法可能存在一定差異,但是其糾偏原理基本一致,實際區別主要是測量門式起重機剛性支腿以及柔性支腿運行速度以及位置的方法存在差異,目前比較常用的方法包括以下幾種。
(1)在門式起重機剛性支腿與柔性支腿的兩側電動機軸亦或車輪上位置安裝編碼器,起重機在運行時,編碼器會與電動機軸亦或車輪軸同步運行,然后以編碼器記錄的運行數據計算起重機剛性支腿以及柔性支腿之間的偏差。(2)在起重機柔性支腿頂部位置安裝角位移傳感器,在起重機運行過程中測量起重機柔性支腿與主梁之間的夾角,然后以此計算出起重機剛性支腿與柔性支腿之間的偏差[4]。(3)利用香蕉摩擦輪驅動旋轉編碼器測量起重機剛性支腿與柔性支腿在起重機運行過程中行走的距離,以此計算出起重機剛性支腿與柔性支腿之間的偏差。(4)在起重機大車運行的鋼軌旁安裝若干個感應電,以接近開關測量起重機剛性支腿與柔性支腿經過感應的次數以及經過的時間差計算起重機剛性支腿與柔性支腿之間的偏差。
3.3優劣勢分析
上述四種方式,各有優劣,在實際使用過程中需要根據門式起重機的實際情況進行選擇。其中第一種測量方式比較簡單,投入成本較低,安裝編碼器即可實現,但是采用這種方式的前提是兩側車輪的直徑一致。第二種方式看似比較直觀,若夾角超過這低于90°時即可判定起重機剛性支腿與柔性支腿之間存在偏差,但是在實際使用過程中,柔性支腿和鋼梁間在垂直與水平方向上都可能存在夾角,因此計算起來比較復雜,難以確保計算結果的精確度。第三種方式以香蕉摩擦輪去驅動旋轉器編碼器測量起重機剛性支腿與柔性支腿在起重機運行過程中行走的距離,其測量精度更高,即便兩側車輪的直徑存在誤差也能確保測量結果的精確度[5]。第四種方式操作比較簡單,投入成本也比較小,其實際測量精度與鋼軌兩側的感應點密度有關系,其局限之處在于只能測量位置數據,無法獲取運行速度數據,同時如何條鋼軌旁的感應點在垂直于鋼軌方向上一一對齊也是安裝時的一個難題,在實際操作中難以解決。
從上述分析來看,以第三種方式的性價比最高,不僅可以有效保證測量精度,同時也能獲取位置數據以及運行速度數據,在本案例中設計采用的自動糾偏系統就采用第三種測量方式,經過實際檢驗,可以有效改善門式起重機運行偏差的問題,減少了人為糾偏操作,同時也降低了運行偏差問題造成的影響,保證了門式起重機的正常作業。
4結語
綜上所述,大跨度門式起重機運行偏斜問題對于起重機正常運行作業會產生嚴重影響,本文具體分析了導致偏斜問題的因素,并具體分析了起重機運行糾偏系統的基本原理,并分析了四種測量方式的優劣,根據本案例的實際情況選擇了第三種方式,有效改善了起重機運行偏差的問題。
參考文獻
[1]徐廣紅,陳兵,屈小章.基于動力學理論起重機水平偏斜載荷性能分析[J].機械設計與制造2016(8):228-231.
[2]鄭長亮.橋式起重機大車偏斜運行時水平側向力的危害與控制[J].時代農機,2014(8):132-133.
[3]徐偉鋒,宋興海.糾偏控制技術在橋、門式起重機中的應用[J].起重運輸機械, 2014(01):73-74.
收稿日期:2019-06-08
作者簡介:周靖(1980—),男,湖北南漳人,本科,工程師(機械),研究方向:港口機械設備制造安裝、運輸工藝設計編制。
Analysis of The Deviation of The large Span Gantry Crane
ZHOU? ?Jing1,2
(1.Shanghai Zhenhua heavy industry harbor machinery General Equipment Co., Ltd., Shanghai? 200125;2.Shanghai Zhenhua heavy industry (Group) Zhangjiagang Port Machinery Co., Ltd., Suzhou? Jiangsu? 215633)
Abstract:Gantry crane is mainly used for loading and unloading operations, including loading and unloading of outdoor freight yard, bulk cargo and stock yard cargo, with a wide range of operations, which can be applied to a variety of operation scenarios. The overall structure of the gantry crane is metal structure, and its appearance is similar to the portal frame. It can move directly on the ground track. In the actual use process, it is affected by many factors such as lifting capacity, system performance, material, etc. Practice has proved that the crane is prone to deflection during operation, which will affect the normal operation of the crane. Combined with practical cases, this paper studies the causes of the deviation of the large-span gantry crane, and discusses the measures to improve the deviation of the large-span gantry crane, so as to provide reference for solving similar problems.
Key words: gantry crane;operation deviation;basic principle;cause analysis; deviation correction
猜你喜歡
中共濟南市委黨校學報(2022年3期)2022-07-26 09:51:46
河北畫報(2020年8期)2020-10-27 02:55:22
時代人物(2019年30期)2019-12-16 02:07:44
電子制作(2019年14期)2019-08-20 05:43:34
山東工業技術(2016年15期)2016-12-01 05:31:11
江西社會科學(2016年4期)2016-12-01 04:36:09
廣西青年干部學院學報(2016年5期)2016-11-24 12:38:47
西部廣播電視(2015年5期)2016-01-16 03:45:06
汽車實用技術(2015年8期)2015-12-26 09:01:00
當代修辭學(2010年1期)2010-01-23 06:35:12